Introduzione
8
Introduzione
I.1 Generalità sulla progettazione dei kayak
Imbarcazioni simili a kayak e canoe sono utilizzate dall’uomo da almeno 2000 anni. Gli sviluppi progettuali che queste imbarcazioni hanno subito nel tempo sono sempre stati ottenuti come soluzioni sviluppate per far fronte ad errori costruttivi, e principalmente come tentativi di riprodurre le forme degli animali marini. La tradizione è stata il modo principale per trasmettere le conoscenze acquisite, come punto di partenza per ulteriori miglioramenti.
Solo nel XX secolo, la progettazione navale ha iniziato ad usufruire di criteri progettuali rigorosi1, principalmente grazie ai risultati delle indagini sperimentali condotte da William Froude (1872) e, successivamente, ai risultati degli studi matematici di J.H. Mitchell (1898) e dei suoi successori (vedi Figura I.1).
Figura I.1 – Moto ondoso studiato da Froude.
I primi studi per mezzo di simulazioni numeriche risalgono a trenta anni fa, grazie allo sviluppo tecnologico dei sistemi di calcolo (computer), con i quali è stato possibile ottenere soluzioni approssimate dei sistemi di equazioni che governano il moto delle imbarcazioni (fino ad allora risolte per un numero limitato di casi semplici).
Introduzione
9 Oggigiorno, l’impiego dei codici CFD (“Computational Fluid Dinamic”) è diventato uno strumento fondamentale in tutti gli studi fluidodinamici di base alla progettazione delle imbarcazioni. Tale tecnica è impiegata anche nella progettazione dei kayak da competizione.
I.2 Il kayak nelle competizioni
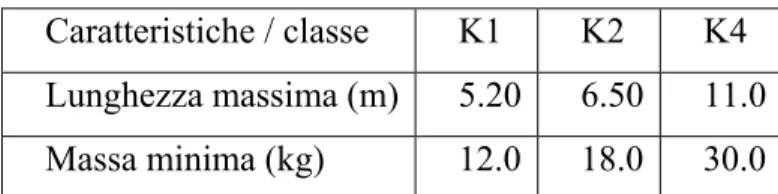
La Federazione Internazionale di Canoa (“International Canoe Federation”, ICF) riconosce attualmente le tre classi di kayak, K1, K2 e K4 per uno, due e quattro atleti, rispettivamente. Le restrizioni sulle dimensioni principali dello scafo sono riportati nella seguente Tabella I.1.
Caratteristiche / classe K1 K2 K4
Lunghezza massima (m) 5.20 6.50 11.0
Massa minima (kg) 12.0 18.0 30.0
Tabella I.1 – Dati relativi alle competizioni olimpiche dei kayak nelle tre discipline.
Le stesse limitazioni vengono applicate sia alle competizioni maschili che femminili. Da notare che le restrizioni fondamentali sono imposte sulla lunghezza e sulla massa: la prima infatti pone dei limiti sulla velocità massima (“Hull Speed”, vedi capitolo 1) e la seconda, da sommare al peso del canoista, rappresenta un limite inferiore alla linea di galleggiamento e di conseguenza all’estensione della superficie bagnata.
All’ultima edizione delle Olimpiadi di Atene 20042, le gare di velocità con il kayak sono state disputate, come da regolamento, su distanze di 500 e di 1000 metri. Nelle successive Tabella I.2 e Tabella I.3 due sono riportati i dati relativi alle due competizioni con i tempi vincenti e con le velocità medie nelle tre discipline maschili. Tali dati sono stati presi come riferimento per la definizione del caso analizzato nel capitolo 1.
Introduzione
10
Disciplina: 500 metri K1 K2 K4
Tempo migliore ottenuto dalla medaglia d’oro 1:37.919 1:27.040 //
Velocità media (m/s) 5.10 5.74 //
Tabella I.2 – Tempi e velocità media nei 500 metri.
Disciplina: 1000 metri K1 K2 K4
Tempo migliore ottenuto dalla medaglia d’oro 3:25.897 3:18:420 2:56:919
Velocità media (m/s) 4.86 5.03 5.65
Tabella I.3 - Tempi e velocità media nei 1000 metri.
I.3 Scopo dello studio
Il presente lavoro di tesi è la prima attività svolta presso il Dipartimento di Ingegneria, Meccanica, Nucleare e della Produzione (DIMNP) dell’Università di Pisa finalizzata allo studio della fluidodinamica di un kayak da competizione. E’ stato creato un modello numerico di uno scafo reale per calcoli di Fluidodinamica Computazionale finalizzati alla stima dell’energia da esso dissipata nel moto in acqua in condizioni stazionarie (generazione delle onde, “Wave Making Resistance”, WMR). Un qualsiasi scafo, avanzando sulla superficie libera di un bacino d’acqua, sposta con un processo continuo una certa quantità d’acqua, generando onde. L’energia dissipata per avanzare è data dalla somma delle azioni viscose agenti sulla superficie bagnata dello scafo, e dell’energia accumulata dalle onde che si staccano dallo scafo. Per evidenziare come il processo di WMR influisca sulle prestazioni di un’imbarcazione, si può considerare il seguente esempio. Una nave classe FFG-7, alimentata da due motori a turbina a gas che erogano una potenza complessiva di 41000 HP, ha una velocità di crociera di circa 25 nodi quando è in funzione una sola delle due turbomacchine3; la velocità di crociera cresce a 29 nodi con entrambe le turbine in funzione. La non linearità nella crescita della potenza richiesta per aumentare la velocità di avanzamento è principalmente correlato alla generazione delle onde.
Oggetto degli studi fluidodinamici è la previsione della resistenza all’avanzamento per poter ottimizzare la forma degli scafi al fine di minimizzare questa energia. La componente che si riferisce alla generazione di onde, rappresenta la parte maggioritaria della complessiva
Introduzione
11 resistenza all’avanzamento incontrata da un kayak. Questa attività è stata svolta adottando un processo di “Reverse Engineering”4: uno scafo reale è stato sottoposto un processo di scansione ottica, per ottenere un descrizione numerica dello superficie esterna dello scafo. Questa discretizzazione numerica è stata la base per lo sviluppo del modello tridimensionale per calcoli fluidodinamici.