Il motore ad effetto Hall
3.1 Principio di funzionamento
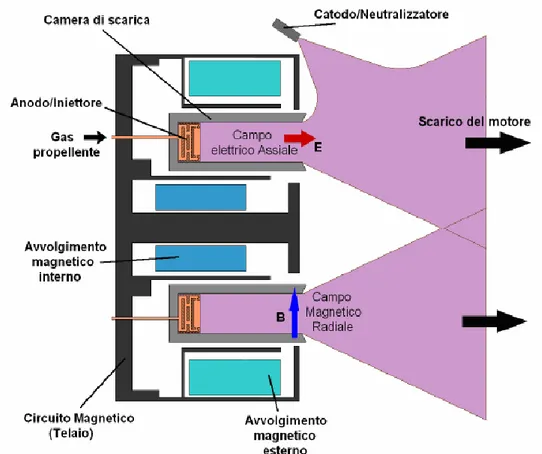
Il processo accelerativo dei motori ad effetto Hall è di tipo elettrostatico, anche se la maggioranza dei fenomeni fisici in atto all’interno del motore sono provocati o comunque fortemente influenzati dalla mutua interazione tra campo elettrico e campo magnetico applicati. Nelle tipiche configurazioni assialsimetriche di HET (si veda la Fig. 2-21) il campo elettrico è diretto secondo l’asse del motore ed il campo magnetico è diretto ortogonalmente a quest’ultimo, cioè in senso radiale. L’interazione tra il moto delle particelle e campo magnetico prevede ad imporre un moto di deriva ciclotronico perpendicolare sia al campo magnetico, sia al campo elettrico: nel caso specifico, quindi, sia elettroni che ioni derivano in senso azimutale. Come sarà meglio specificato in seguito, la camera di scarica viene progettata in modo tale da rendere impossibile la deriva degli ioni che proseguono la loro accelerazione in verso concorde con quello del campo elettrico stesso, e quindi in senso assiale.
Al contrario, gli elettroni, immessi nel canale di accelerazione dal catodo e sotto l’effetto combinato di entrambi i campi, iniziano a derivare in direzione azimutale, dando origine a una corrente elettronica azimutale netta e creando una zona di addensamento di elettroni proprio in corrispondenza dell’uscita del canale (traferro).
38
Fig. 3-1– Schema di funzionamento di un motore ad effetto Hall. [8]
La deviazione azimutale del moto degli elettroni provoca il quasi annullamento della loro velocità assiale e il conseguente aumento della resistività del plasma che permette la generazione di un campo elettrico diretto assialmente verso l’uscita del propulsore. Gli ioni seguendo la differenza di potenziale vengono sparati fuori dalla camera di accelerazione, e grazie alla loro massa oltrepassano il campo magnetico senza subire grandi deviazioni.
Come nei motori a ioni la velocità di espulsione degli ioni è proporzionale alla radice quadrata del potenziale di scarica secondo la legge:
(3.1)
Dove rappresentano rispettivamente la velocità, la massa e la carica degli ioni; Z rappresenta lo stato di ionizzazione degli ioni (singola, doppia, etc.); e rappresenta il potenziale di scarica.
Una volta superata la zona di uscita del motore, gli ioni proseguono la loro corsa come neutri dopo essere stati neutralizzati dal catodo. Si noti che gli elettroni creati dalla ionizzazione del propellente contribuiscono a loro volta al mantenimento della scarica, derivando lentamente verso l’anodo e alimentando la corrente azimutale. Una volta raccolti dall’anodo questi elettroni vengono nuovamente messi in circolo attraverso un opportuno generatore di tensione e verranno poi riemessi dal catodo in
39 o Efficacia del processo di ionizzazione, prodotto dalla stessa corrente di scarica, senza la necessità di introdurre un opportuno elemento di ionizzazione, come succede invece nei motori elettrostatici con conseguente riduzione del rendimento.
o Assenza di limiti di carica spaziale sulla corrente estraibile e quindi sulla spinta, come accade invece nei propulsori elettrostatici, benché il processo accelerativo sia di natura elettrostatica.
o Riduzione dei fenomeni d’erosione degli elettrodi non essendo questi immersi nel plasma.
o All’interno della famiglia dei propulsori elettrici, gli HET sembrano i più adatti a subire un processo di scalatura.
40
Fig. 3-3– Esempio di propulsore elettrico ad effetto Hall (HET).
3.1.1
Descrizione e geometria del motore
In Fig. 3-4 è riportato un tipico schema assialsimmetrico di un motore ad effetto Hall.
41 2. Anodo/iniettore, anch’esso di forma anulare e costruito in materiale metallico (titanio o acciaio), caratterizzato da una complessa struttura interna che assicura la fuoriuscita del gas in condizioni di equilibrio termo-meccanico;
3. Avvolgimenti magnetici o magneti permanenti, aventi il compito di generare le forze magnetomotrici che portano alla creazione di un flusso magnetico all’interno del circuito magnetico; i magneti permanenti vengono utilizzati nei propulsori di bassa potenza.
4. Circuito magnetico, costituito da un telaio di materiale ferromagnetico e avente il compito di incanalare il campo magnetico generato dagli avvolgimenti (o magneti permanti) determinando così una precisa distribuzione del campo magnetico al suo interno, in particolare nella zona del traferro;
5. Catodo/neutralizzatore, posto all’esterno del motore, ha il compito di immettere elettroni, avviando e poi sostenendo così la scarica, e inoltre ha il compito di neutralizzare il fascio di ioni in uscita dal motore.
Il progetto geometrico di un motore ad effetto Hall ha un notevole impatto sul funzionamento dello stesso; in effetti esistono particolari requisiti di disegno che devono essere rispettati affinché possano avvenire nel motore i fenomeni fisici utili per la generazione di spinta.
Tali requisiti derivano immediatamente da alcune delle caratteristiche viste nel paragrafo precedente; in particolare è di notevole importanza la differenza di moto tra gli ioni e gli elettroni.
Il primo dei requisiti geometrici, fondamentali per il corretto funzionamento del motore, riguarda il dimensionamento della camera di scarica. Essa deve essere lunga a sufficienza per garantire una corretta ionizzazione e una sufficiente accelerazione degli ioni generati, per tale motivo per la progettazione della camera devono essere attentamente studiati tre processi fisici: la ionizzazione, la diffusione e
42
l’accelerazione. I tre processi non verranno studiati qui nel dettaglio, ma può essere fatta un’importante stima per quanto riguarda una delle dimensioni della camera di accelerazione, la larghezza radiale. Per consentire il moto ciclotronico azimutale degli elettroni la larghezza radiale della camera deve essere sufficientemente grande, ma essa deve essere allo stesso tempo sufficientemente piccola da rendere gli ioni immuni dal campo magnetico applicato, in modo tale che essi possano essere soggetti al solo campo elettrico assiale applicato. Queste limitazioni in termini matematici portano alla seguente disequazione, in cui b sta a indicare la larghezza della camera anulare:
(3.2)
dove e rappresentano rispettivamente il raggio di Larmor per gli elettroni e il raggio di Larmor per gli ioni.
Il secondo requisito geometrico riguarda la particolare forma del circuito e quindi del campo magnetico.
La topografia del campo magnetico è di estrema importanza nell’interazione dei complessi fenomeni fisici in atto all’interno del canale di accelerazione. Essa influenza non solo l’aumento di resistività del plasma con conseguente influenza sul processo di ionizzazione e di accelerazione, ma determina i complessi fenomeni alla base della diffusione, delle interazioni con le pareti e del comportamento del fascio ionico sia dentro che fuori dal canale.
Esistono diverse configurazioni geometriche per il circuito magnetico. Con riferimento alla (Fig. 3.9), esso è costituto da bobine poste attorno ad un telaio in materiale ferromagnetico che indirizzano opportunamente le linee di flusso. In genere grazie all’utilizzo di un elemento fondamentale, denominato schermo
magnetico, il canale di accelerazione in prossimità dell’anodo viene svuotato dalle
linee di campo, presupposto fondamentale per un buon funzionamento del motore. La forma da dare al telaio rappresenta la vera e propria chiave di volta della progettazione dei motori ad effetto Hall.
43
Fig. 3-5– Sezione di un modello semplificato di un motore ad effetto Hall.
In Fig. 3-6 è riportato, a titolo di esempio, il risultato di una simulazione agli elementi finiti eseguita con il programma FEMM 4.0: in essa è possibile vedere la distribuzione delle linee di campo magnetico passanti nel circuito magnetico di una configurazione semplificata di HET.
Si noti, inoltre, l’importanza strategica dello schermo magnetico: “catturando” le linee magnetiche in ingresso e in uscita del telaio, determina una precisa distribuzione spaziale del campo magnetico all’interno del motore in corrispondenza della camera di scarica.
Fig. 3-6– Simulazione FEMM del flusso magnetico in un modello semplificato di HET [5][6].(non è proprio bellissima come distribuzione…)
44
Un’ultima osservazione di tipo geometrico riguarda l’anodo, in quanto esso non deve solo fungere da elettrodo ma ha anche l’ulteriore funzione di permettere l’ingresso del gas propellente all’interno della camera di accelerazione; per tale ragione il disegno interno dell’anodo si presenta assai complesso ed è costituito, generalmente, da una sorta di labirinto metallico che rende possibile il raggiungimento di precise condizioni termodinamiche (pressione, densità, velocità, temperatura) da parte del propellente iniettato in camera di scarica.
3.2 Parametri di prestazione dei motori ad effetto Hall
Per poter analizzare i parametri di prestazione dei motori ad effetto Hall bisogna prima enunciare le ipotesi di base che vengono assunte per entrare nel dettaglio dello studio di un motore di questo tipo. Le ipotesi principali sono tre:
1. Raggio di Larmor degli elettroni molto piccolo.
Tramite questa ipotesi si possono quindi trascurare gli effetti di tipo convettivo per quanto riguarda i fenomeni di trasporto, rimanendo quindi solo nel caso di trasporto per diffusione (limite diffusivo). La densità di corrente risultante può così essere espressa semplicemente tramite la legge di Ohm:
(3.3) 2. Frequenza di ciclotrone degli elettroni maggiore della frequenza di collisione
elettronica ( ).
Secondo tale ipotesi, gli elettroni che entrano nel canale hanno la tendenza a “ciclare” con una frequenza superiore rispetto a quella di impatto con le altre specie presenti nel canale; ciò fa si che il moto degli elettroni sia caratterizzato da un frenetico moto ciclotronico azimutale che rallenta la deriva elettronica verso l’anodo, aumentando il tempo di residenza degli elettroni in camera di scarica, e determinando così sia la ionizzazione del propellente sia l’accelerazione degli ioni.
3. Termine convettivo dell’equazione di momento elettronica trascurabile. Considerando il rapporto tra la massa dell’elettrone e la massa dello ione ( ), tale ipotesi risulta giustificata; ciò ci permette di semplificare l’equazione di moto degli elettroni riducendo la complessità dell’intero set di equazioni per il moto delle particelle in un plasma.
Partendo da questi presupposti, il principale parametro di prestazione per un HET è il
45 potenziale della scarica tra anodo e catodo.
Per poter approssimare meglio la realtà, il rendimento di spinta può essere moltiplicato per alcuni fattori di perdita correttivi che tengono conto delle perdite di efficienza legate ai diversi fenomeni fisici interni ed esterni al motore. Così facendo è possibile definire il rendimento di spinta reale:
(3.5)
dove:
, rendimento di corrente, rappresenta la frazione di corrente elettrica che effettivamente entra in gioco nell’accelerazione degli ioni, che può essere espressa dal rapporto tra la corrente ionica ( ) e la corrente totale della scarica ( ).
(3.6)
, rendimento di massa o rendimento di ionizzazione, indica la percentuale di portata di propellente che viene effettivamente ionizzato:
(3.7)
dove è la portata di massa ionica in uscita dal propulsore e è la portata di propellente in ingresso.
, rendimento di divergenza del fascio, indica la porzione di energia del fascio che non partecipa alla spinta assiale del motore
46
(3.8)
dove:
= velocità media ionica;
= media della componente assiale della velocità ionica; = angolo di divergenza del fascio.
La causa principale della divergenza del fascio è da attribuire alle collisioni tra atomi neutri e ioni nella zona d’uscita.
, rendimento di dispersione di velocità, tiene conto dell’effetto legato alla dispersione della velocità ed indica quindi l’attendibilità del termine legato alla media delle energie delle singole particelle:
(3.9)
![Fig. 3-1– Schema di funzionamento di un motore ad effetto Hall. [8]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7544614.108587/2.892.241.643.153.498/fig-schema-funzionamento-motore-effetto-hall.webp)
![Fig. 3-2- Esempio di motore ad effetto Hall e relativo getto. [8]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7544614.108587/3.892.195.778.735.1003/fig-esempio-motore-effetto-hall-relativo-getto.webp)
![Fig. 3-6– Simulazione FEMM del flusso magnetico in un modello semplificato di HET [5][6].(non è proprio bellissima come distribuzione…)](https://thumb-eu.123doks.com/thumbv2/123dokorg/7544614.108587/7.892.280.672.155.473/simulazione-flusso-magnetico-modello-semplificato-proprio-bellissima-distribuzione.webp)
