4 TARATURA DEL BANCO
Le operazioni di taratura sono state effettuate al fine di calibrare e verificare il funzionamento del banco in tutte le sue parti.
In primo luogo è stata effettuata una taratura preliminare su ogni dinamometro, come è stato gia accennato nel precedente capitolo. Sono state così valutate la linearità del comportamento degli strumenti e le costanti di proporzionalità fra carico applicato e tensione misurata per ognuno di essi. Questa prima fase è stata utile anche per valutare l’efficienza e le prestazioni dei sistemi di acquisizione.
In seguito è stata eseguita la taratura del banco nel suo complesso. Sono state così verificate le costanti degli strumenti ottenute in precedenza e sono state ricavate le due matrici di calibrazione . Questa seconda fase è stata svolta sul banco completamente assemblato in ogni sua parte. Ciò ha consentito una prima verifica del funzionamento delle architetture del banco e dei cablaggi degli strumenti. Inoltre sono stati provati i morsetti di sicurezza e il circuito pneumatico che li aziona.
4.1
Taratura preliminare dei dinamometri
4.1.1 Analisi delle sequenze di taratura
Volendo verificare le sensibilità dei pendoli strumentati è stata fatta una analisi sui carichi cui è soggetto il gruppo motore-fusoliera e di come questi ultimi si ripartiscono sui dinamometri. Come è stato mostrato in precedenza (Capitolo 1) si è previsto per la spinta un valore minimo di 5.85Kg e un valore massimo di 23.42 Kg , al variare del numero di giri da
2500 a 5000 rpm . Analogamente per la coppia avremo un minimo di 1.20 Kg⋅ e un m
massimo 4.82 Kg⋅ . m
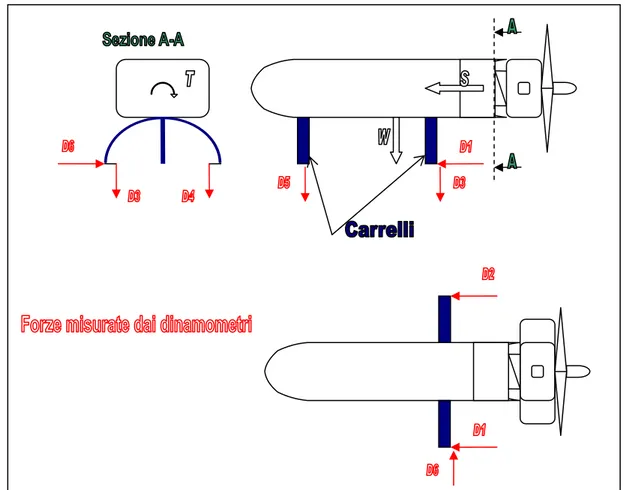
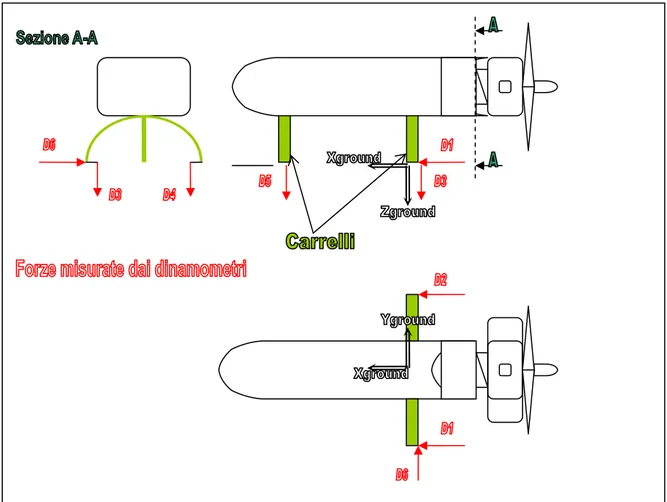
Le forze rappresentate in figura 4.1 schematizzano le azioni che si esercitano sulla struttura :
D1, D2 Dinamometri di spinta
D5, D3, D4 Dinamometri verticali
P6, P7 Pendoli laterali di vincolo
Figura 4.1 Schema delle azioni che si esercitano sulla struttura motore-fusoliera
Il peso complessivo del gruppo motore-fusoliera è stato cosi stimato:
(
Totale Kg)
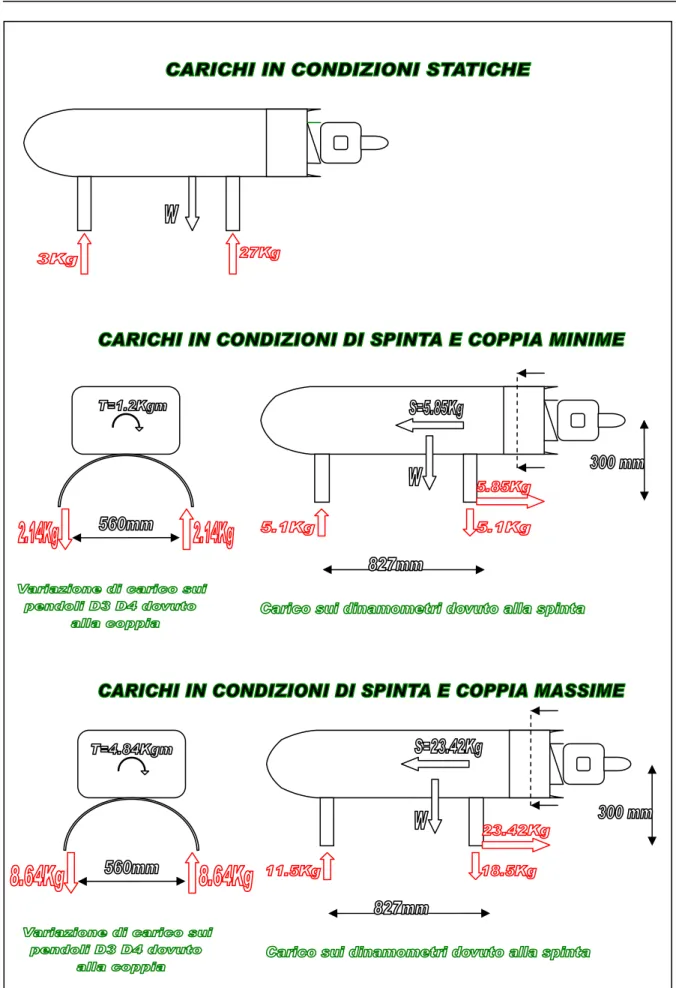
Kg Batterie Kg Carrelli Kg Fusoliera Kg Generatore Kg Motore 30 7 3 4 4 8 ≅ ≅ ≅ ≅ ≅ ≅Nello schema di figura 4.2 viene mostrato come i singoli contributi di spinta, peso, e coppia agiscano sugli strumenti. I pendoli D3, D4 oltre a sopportare il carico dovuto al peso:
27 Kg, circa il 90% del peso complessivo (13.5 Kg sul singolo dinamometro), devono fornire una coppia resistente a quella trasmessa dall’elica. Come mostrato in figura, D4 viene
sovraccaricato e D3 scaricato. La variazione di carico massima sui due pendoli è di 8.64 Kg.
D5 è soggetto alla restante parte del peso del velivolo, circa il 10% (3 Kg), cui deve
essere sommato il contributo dovuto alla spinta che carica D5 e scarica i dinamometri del
carrello posteriore della stessa quantità. Il carico massimo cui è soggetto è di 11.5 Kg.
Inoltre D1 , D2 sono soggetti alla spinta ed ai carchi dovuti ad eventuali momenti
imbardanti ed infine D6, e soggetto ai soli carichi laterali. In questa analisi le sollecitazioni
dovute ai carichi laterali e alle azioni imbardanti, sicuramente presenti nel sistema, ma di piccola entità rispetto alle altre forze in gioco, sono state poste uguali a zero.
Tabella 4.1 Variazioni di carico sui sei dinamometri
Nell’ analisi sopra svolta, riassunta in tabella 4.1, è stato stimato l’ordine di grandezza ed il range di variazione dei carichi agenti sugli strumenti. E’ stato così possibile scegliere delle sequenze di taratura con cui calibrare i pendoli strumentati.
Per i pendoli D1, D2, , D5 e D6 è stata adottata una rampa di carico progressiva da 0 a
13 Kg:
I Rampa di carico(Kg) 0 4.025 6.040 7.055 9.070 10.080 11.090 11.695 12.095 12.530 12.950
I restanti strumenti D3, D4, sono stati calibrati su un intervallo più ampio da 0 a 23 Kg.
II Rampa di carico (Kg) 0 4.025 8.055 10.070 11.085 13.100 14.110 15.120 17.265 19.308 21.302 21.767 22.167 22.602 23.020
D1 D2 D3 D4 D5 D6
Carico statico (Kg) 0 0 13,5 13,5 3 0 Carico dinamico minimo (Kg) 2.925 2.925 14.59 10.31 5.1 0 Carico dinamico massimo (Kg) 11.71 11.71 17.89 0.61 11.5 0
4.1.2 Allestimento degli elementi
Tramite una barra filettata il giunto sferico del pendolo viene appeso a una mensola come viene mostrato in figura 4.3. All’ altra estremità dello strumento viene collegato il primo peso della catena di taratura.
Figura 4.3 Allestimento degli elementi per la taratura
Le rampe di carico sono state realizzate usando una serie di pesi (figura 4.4) forniti di opportuni agganci.
Ogni singolo peso, completo di ganci, è stato calibrato in precedenza usando la bilancia elettronica sospesa KERN MH5K5 (figura 4.6). La sensibilità della bilancia, 0,005Kg e il suo carico massimo, 5Kg sono più che sufficienti per i nostri scopi.
4.1.3 Taratura con lo Spider 8
Come è stato gia descritto (Capitolo 3) per l’acquisizione dei dati è stato inizialmente scelto lo Spider 8 della HBM. I risultati ottenuti per il primo pendolo, come mostrato in tabella 4.2, mostrano come i dinamometri si comportino in modo pressoché lineare.
Tabella 4.2 Carichi applicati, valori di tensione media acquisiti e costanti di proporzionalità locali ricavate
Carico applicato (Kg) 0 4.025 6.040 7.055 9.070 10.080 11.090 11.695 12.095 12.530 12.950
Tensione media (V) 0 0.100 0.150 0.175 0.224 0.249 0.273 0.287 0.297 0.308 0.318
(Kg/V) 0 40.345 40.165 40.401 40.452 40.461 40.641 40.719 40.704 40.714 40.742
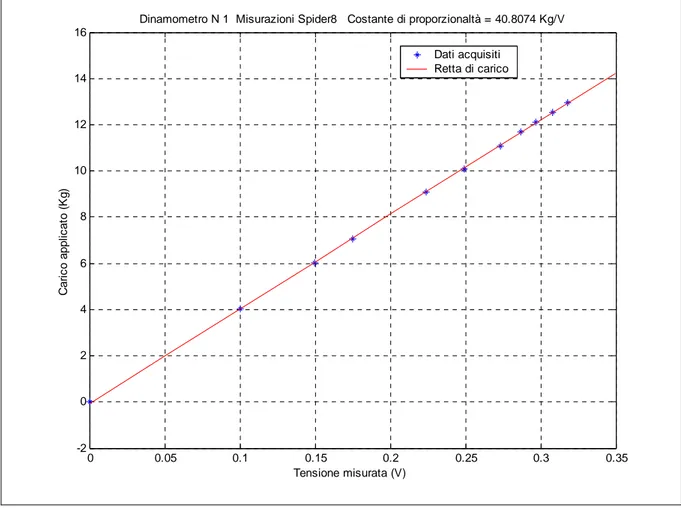
In figura 4.5 è stata riportata la retta di carico ricavata per il primo dinamometro. In blu sono stati rappresentati i valori acquisiti durante la taratura. La costante di proporzionalità
8074 , 40
1 =
K Kg /V, calcolata interpolando i punti acquisiti, coincide con la pendenza della
retta di carico. 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 -2 0 2 4 6 8 10 12 14 16 Tensione misurata (V) C a ri c o appl ic at o ( K g )
Dinamometro N 1 Misurazioni Spider8 Costante di proporzionaltà = 40.8074 Kg/V
Dati acquisiti Retta di carico
I dati ottenuti, sebbene evidenzino la stabilita e la linearità nel comportamento del pendolo strumentato, non possono essere adottati per la calibrazione. Infatti, come è gia stato accennato, lo Spider 8 fornisce valori di amplificazione insufficienti per questo genere di applicazioni: con una costante di proporzionalità K1 =40,8074 Kg /V ad una variazione di carico applicato ∆P=1Kg corrisponde una variazione nella tensione misurata ∆V ≈0.025V.
La sensibilità dello strumento è quindi fortemente penalizzata dai bassi valori di amplificazione. Per questo motivo si è deciso di non usare lo Spider 8.
4.1.4 Taratura con la centralina di amplificazione analogica.
In alternativa allo Spider 8 (vedi Capitolo 3) è stata adottata una centralina di amplificazione analogica abbinata a una scheda di acquisizione NI.
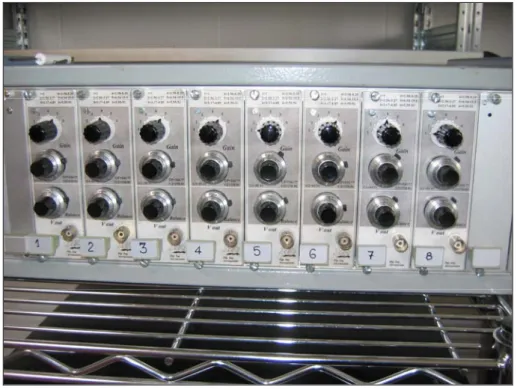
In questo secondo caso l’amplificazione può essere aumentata a piacimento settando i potenziometri presenti sul pannello di controllo della centralina (figura 4.6).
Figura 4.6 Pannello di controllo della centralina
Naturalmente, aumentando l’amplificazione, aumentano anche i disturbi dovuti al rumore sul segnale. E’ stato quindi necessario controllare, mediante misurazioni effettuate all’oscilloscopio, l’ampiezza di tale rumore. Le misurazioni effettuate hanno fornito per il
rumore un ampiezza al di sotto dei 20mV .Tale valore è del tutto accettabile e non è stato quindi necessario adoperare alcun filtraggio sul segnale.
E’ opportuno notare che, mentre lo Spider 8 garantiva lo stesso livello di amplificazione su ogni canale, la centralina, che necessita di un opportuna regolazione manuale, non permette di ottenere un livello di amplificazione costante per canale.
Consideriamo ora i risultati ottenuti per il primo pendolo (tabella 4.3). Notiamo che, come nel caso precedente, il comportamento è ancora lineare.
Tabella 4.3 Carichi applicati, valori di tensione media acquisiti e costanti di proporzionalità locali ricavate
Carico applicato (Kg) 0 4.025 6.040 7.055 9.070 10.080 11.090 11.695 12.095 12.530 12.950
Tensione media (V) 0 0.958 1.440 1.681 2.156 2.382 2.607 2.744 2.830 2.933 3.037
(Kg/V) 0 4.200 4.193 4.198 4.206 4.231 4.254 4.263 4.274 4.273 4.264
In figura 4.7 sono stati riportati in blu i punti acquisiti durante la taratura e in rosso la retta di carico dello strumento. La costante di proporzionalità vale K1 =4,2818 Kg /V.
0 0.5 1 1.5 2 2.5 3 3.5 -2 0 2 4 6 8 10 12 14 16 Tensione misurata (V) C a ri c o appl ic at o ( K g )
Dianmometro N 1 Costante di proporzionalità = 4.2818
Dati acquisiti Retta di carico
Figura 4.7 Retta di carico per il dinamometro 1 tarato con la centralina
I dati ottenuti in questo secondo caso, oltre ad evidenziare la linearità del dinamometro, mostrano come adesso la sensibilità dello strumento sia aumentata di circa un ordine di grandezza. Infatti con la nuova costante di proporzionalità K1 =4,2818 Kg /V ad un
Kg P=1
∆ corrisponde una variazione di tensione ∆V ≈0.234V .
Le tabelle ed i grafici relativi agli altri 4 pendoli sono riportati in appendice B.
Le costanti di proporzionalità di tutti i 5 dinamometri sono riportate in tabella 4.4.
Tabella 4.4 Costanti di proporzionalità ricavate per i sei dinamometri
D1 D2 D3 D4 D5 D6
4.2
Taratura complessiva del banco
4.2.1 Matrici di calibrazione
Come gia visto al capitolo 3 lo scopo della taratura complessiva del banco è la verifica delle costanti di proporzionalità e la determinazione delle matrici di calibrazione del banco. Tali matrici creano un legame fra le forze misurate dagli strumenti e i carichi realmente agenti sul gruppo motore fusoliera.
Come è stato gia accennato sono stati definiti due sistemi di riferimento rispetto ai quali orientare le forze e i momenti in gioco.
Il sistema di riferimento “Ground”, pensato solidale al basamento del banco, è stato posto (vedi figura 4.8) con glia assi X e Y giacenti sul piano su cui si esercitano le forze dei dinamometri di spinta. L’origine coincide con la mezzeria dell’apertura del carrello posteriore.
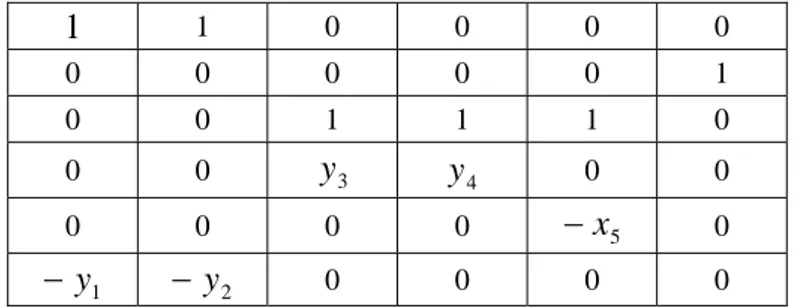
Dal sistema di equazioni 2.1 (vedi capitolo 2) che trasforma le forze misurate sui dinamometri in forze e momenti agenti nel sistema di riferimento “Ground” è stata ricavata la matrice di calibrazione B ( tabella 4.5).
Tabella 4.5 matrice “B” 1 1 0 0 0 0 0 0 0 0 0 1 0 0 1 1 1 0 0 0 y3 y4 0 0 0 0 0 0 −x5 0 1 y − − y2 0 0 0 0
Come secondo riferimento è stato adottato il sistema “Body” pensato applicato al baricentro del velivolo e ad esso solidale. Il sistema “Body” è disposto sul velivolo come schematizzato in figura 4.9. La sua origine coincide col baricentro del velivolo.
Dal sistema di equazioni 2.2 (vedi capitolo 2) che permette di calcolare le forze e i momenti del sistema “Ground” in funzione di quelli del sistema “Body” è stata ricavata la seconda matrice di calibrazione C ( tabella 4.6 ).
Tabella 4.6 matrice “C” α cos * 0 sinα 0 0 0 0 1 0 0 0 0 α sin − 0 cosα 0 0 0 0 −zb** 0 cosα 0 sinα b b z x + ⋅ ⋅ α α cos
sin 0 sinα⋅zb −cosα⋅xb 0 1 0
0 xb 0 −sinα 0 cosα
* con alfa angolo di inclinazione dell’asse Xbody rispetto all’ asse X ground ** con zb e xb coordinate dell’origine del sistemema body rispetto al sistema round
4.2.2 Misura del peso e determinazione della posizione del baricentro.
Nel paragrafo 4.1, al fine di determinare delle realistiche sequenze di taratura era stata fatta una stima preliminare del peso del gruppo motore-fusoliera e della posizione del suo baricentro. A questo punto è stato possibile pesare direttamente il gruppo motore-fusoliera subito prima di montarlo sul banco.
Le misurazioni sono state quindi effettuate dopo aver alloggiato in fusoliera, su delle opportune travi di pavimento in alluminio, le batterie, gli interruttori e i vari cablaggi. Sono stati inoltre montati sul motore il servo motore, sulla paratia posteriore del velivolo, il motorino di avviamento, con le relativa ghiera, e l’elica.
Per la pesatura sono state usate tre bilance elettroniche con piattaforma KERN ECB 50K50 (vedi figura 4.10 ) disposte sotto i carrelli del velivolo.
Figura 4.10 Bilancia elettronica KERN ECB 50K50
I risultati trovati confermano in buona misura le ipotesi fatte in precedenza. Il gruppo motore-fusoliera pesa 30,15Kg (era stato stimato un peso di circa 30 Kg ), sul carrello anteriore si scaricano 1,1Kg e su quello posteriore 29,05Kg. Il baricentro del gruppo motore- fusoliera si trova 30,17 mm prima del carrello posteriore (era stata ipotizzata una distanza di 82,17 mm ).
4.2.3 Calibrazione
È stato necessario effetuare una calibrazione del banco al fine di verificare le matrici B e C mostrate in precedenza ed il comportamento complessivo degli strumenti . Per tale scopo è stata usata una carrucola e un tirante (vedi figura 4.11) in acciaio con i quali è stato possibile applicare un carico lungo l’asse teorico di azione della spinta motore, posizionato 365mm al di sopra del piano di azione dei dinamometri di spinta.
Figura 4.11 Bilancia elettronica KERN ECB 50K50
Durante le operazioni di calibrazione è stato inoltre possibile verificare il funzionamento dei morsetti di sicurezza pneumatici, dei relativi condotti di alimentazione e del rubinetto per l’azionamento.
La matrice B dipende solo dalla geometria del banco: la semiapertura del carrello posteriore, 297.5mm e la distanza fra carrello anteriore e posteriore, 824mm. Quindi la matrice B vale:
Carrucola Attacco alla
Tabella 4.5 Valori numerici della matrice “B” 1 1 0 0 0 0 0 0 0 0 0 1 0 0 1 1 1 0 0 0 -297,5 297,5 0 0 0 0 0 0 -824 0 297,5 -287,5 0 0 0 0
La matrice C dipende dalla posizione relativa del sistema di riferimento Body, solidale al gruppo motore-fusoliera, rispetto al sistema di riferimento Ground. L’origine del sistema Body rispetto al sistema Ground ha coordinate xb=30,17mm, yb=0, zb=365mm. L’angolo di inclinazione fra Gli assi Xbody e Xground è stato posto uguale a zero. Il valore della matrice C è di:
Tabella 4.6 Valori numerici della matrice “C”
1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 365 0 1 0 0 -365 0 -30,17 0 1 0 0 30,17 0 0 0 1
Per la calibrazione è stata applicata una rampa di carico progressiva crescente fino a 22.259kg e successivamente una decrescente fino a 0 in modo da valutare l’eventuale isteresi nel comportamento del banco. Le rampe sono state realizzate con una serie di pesi analoghi a quelli usati per le tarature sui singoli dinamometri.
Le due matrici sopra riportate e il vettore contenente le costanti di proporzionalità dei dinamometri (vedi tabella 4.4) costituiscono l’input del codice TaraturaBanco AA.vi creato per la gestione della calibrazione.
In figura 4.12 sull’asse delle ascisse abbiamo il carico applicato lungo l’asse Xbody durante la calibrazione, sulle ordinate il carico misurato dal banco. In blu sono stati riportati i valori acquisiti durante la rampa crescente in rosso quelli relativi alla rampa decrescente, le due rette in verde delimitano la zona del grafico all’interno della quale l’errore di misura è inferiore all’8%, le due rette color arancio delimitano invece la zona con errore inferiore al
la 3%. L’errore cresce quando il carico applicato supera i 19kg restando comunque intorno a limiti tollerabili. Questo comportamento è probabilmente conseguenza delle variazioni nell’ angolo di assetto del velivolo che diventano sempre più rilevanti per carichi applicati di notevole entità. Notiamo inoltre come i valori acquisiti durante la rampa di carico decrescente rivelino una bassissima presenza di fenomeni di isteresi nel comportamento complessivo degli strumenti. 0 5 10 15 20 25 -5 0 5 10 15 20 25
Carico applic ato (Kg)
C a ri c o m is u ra to (K g )
Rampa di carico crescente Rampa di carico decrescente
Figura 4.12 Dati acquisiti durante la calibrazione lungo l’asse Xbody Errore dell’8% Errore dell’3%
Tabella 4.7 Forze in kg misurate dai singoli dinamometri al variare del carico applicato
In conclusione in tabella 4.7 sono state riportate le forze misurate dai dinamometri in funzione del carico applicato. È evidente come i dinamometri verticali posteriori 3 e 4 si scarichino progressivamente all’aumentare del carico mentre il dinamometro verticale anteriore si sovraccarica. Questo effetto è dovuto alla variazione che il carico applicato lungo l’asse Xbody genera nell’ assetto del velivolo. Si noti inoltre l’ aumento proporzionale delle forze misurate dai dinamometri 1 e 2 all’aumentare del carico, la differenza fra carichi misurati dai due dinamometri è imputabile a un disallineamento del carico applicato rispetto al reale asse Xbody. Il dinamometro 6, come si vede, resta scarico in quanto soggetto ai soli carichi laterali che in questo caso sono assenti. Il dinamometro anteriore 5, che dovrebbe caricarsi in conseguenza della sola variazione di assetto, risulta sovraccaricato soprattutto per valori di carico applicato elevati questo effetto è da imputarsi come è stato accennato in precedenza alla variazione nell’ angolo di assetto del velivolo che genera una rotazione del dinamometro attorno al suo vincolo. In questo modo il 5 non è più perpendicolare ma inclinato ciò fa sì che sul dinamometro non agiscano più i soli carichi verticali ma anche una parte di quelli orizzontali.
Carico applicato (Kg) D1(Kg) D2(Kg) D3(Kg) D4(Kg) D5(Kg) D6(Kg) 0.000 0.006 -0.038 -0.003 -0.002 -0.000 -0.008 4.025 1.779 1.938 -0.692 -0.661 1.895 -0.012 8.055 3.735 4.087 -1.426 -1.454 3.692 0.013 10.070 4.649 5.106 -1.838 -1.858 4.640 -0.027 12.215 5.594 6.242 -2.254 -2.262 5.560 -0.028 14.220 6.653 7.372 -2.655 -2.695 6.639 -0.019 16.213 7.568 8.363 -3.010 -3.054 7.440 -0.021 18.222 8.362 9.206 -3.359 -3.330 8.292 0.015 20.265 9.014 9.911 -3.755 -3.717 9.302 0.013 22.259 9.731 10.667 -4.149 -4.096 10.065 0.022