Capitolo 2
Studio di un’interfaccia per un
sensore STMicroelettronics
2.1. Sensore STMicroelettronics
Il sensore che viene preso sotto esame è un sensore di pressione capacitivo realizzato dalla STMicroelettronics, per il quale sono state progettate l’interfaccia e il linearizzatore in lavori di tesi precedenti. La struttura del sensore è mostrata in Figura 2.1. Il substrato di tipo p costituisce l’elettrodo inferiore del condensatore mentre la regione di tipo n quello superiore; nella cavità tra i due elettrodi si trova incapsulata aria a bassa pressione.
Figura 2.1: struttura di principio del sensore.
Nella tabella seguente sono riportati alcuni valori caratteristici del sensore con pressione di fondoscala 405,2 KPa e 1215,6 KPa.
Pressione di fondoscala 405,2 KPa 1215,6 KPa
Raggio della membrana R = 105 m R = 80 m
Spessore della membrana h = 5 m h = 5 m
Gap aria d0 = 1,6 m d0 = 1,6 m
Capacità a riposo C0 = 0,192 pF C0 = 0,111 pF
Resistenza Rp = 2600 Rp = 4470
Pressione max sopportabile dal dispositivo Pmax = 1,33E6 Pa Pmax = 3,95E6 Pa
Pressione interna della cavità (T=298 K) Pint = 2172 Pa Pint = 2172 Pa
Tabella 2.1: dati caratteristici per il sensore con pressione di fondoscala da 4 atm e 12 atm.
Il principio di funzionamento è abbastanza semplice: all’ aumentare della pressione la membrana, flettendosi, causa una diminuzione dello spessore della cavità d0 e quindi una variazione della capacità.
In Figura 2.1 sono mostrati anche i problemi a cui è soggetto il sensore:
• per mantenere in inversa le giunzioni di isolamento, l’elettrodo superiore
si deve trovare ad una tensione maggiore o uguale a quello inferiore;
• per la presenza delle giunzioni fluirà una corrente di saturazione inversa
che è fortemente variabile con la temperatura di esercizio del sensore;
• le giunzioni polarizzate in inversa introducono anche delle capacità
giunzioni e sono molto più grandi delle variazioni di capacità indotte dalla pressione.
La risposta del sensore in funzione della pressione è la seguente
0 int max int max ( ) C tanh P P C P a P P P P − = − (2.1)
Di seguito sono mostrati il grafico della funzione C(P) e l’andamento della sua derivata, calcolata in funzione della pressione.
0 100000 200000 300000 400000 500000 600000 700000 800000 0,19 0,20 0,21 0,22 0,23 0,24 0,25 C ap ac ity (p F) Pressure (Pa)
Figura 2.2: caratteristica del sensore con pressione di fondoscala di 4 atm.
0 100000 200000 300000 400000 500000 600000 700000 800000 4,00E-008 5,00E-008 6,00E-008 7,00E-008 8,00E-008 9,00E-008 1,00E-007 1,10E-007 1,20E-007 1,30E-007 Pressure (Pa) dC /d P
Come si nota dall’espressione di C(P) e dai due grafici precedenti la risposta del sensore non è lineare con la pressione, per questo motivo, a valle di un’interfaccia di lettura, è stato progettato un stadio di linearizzazione. Quest’ultimo è stato ideato in un precedente lavoro di tesi, mentre in questa tesi è stato portato avanti il progetto elettrico e sviluppato un prototipo fino a livello di layout.
La capacità dovuta alla giunzione è
0 j r A C W
ε ε
= (2.2)Dove l’area A e la zona di svuotamento W della giunzione hanno la seguente espressione 2 A= πRh (2.3)
(
)
0 0 2 r V V W qNaε ε
⋅ + =Per l’espressione dell’ampiezza della zona di svuotamento si è usata quella della giunzione p-n+ e con V
0 si è indicato il potenziale di contatto della giunzione.
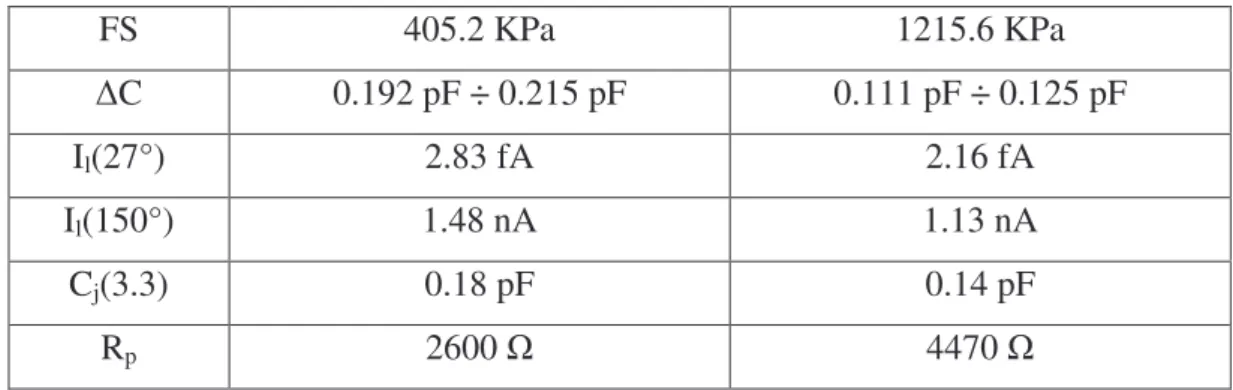
La Figura 2.4 rappresenta il circuito equivalente del sensore usato per simularne il comportamento elettrico, mentre nella Tabella 2.2 sono riportati i valori caratteristici più importanti.
Rp
C I1 Cj
FS 405.2 KPa 1215.6 KPa C 0.192 pF ÷ 0.215 pF 0.111 pF ÷ 0.125 pF Il(27°) 2.83 fA 2.16 fA Il(150°) 1.48 nA 1.13 nA Cj(3.3) 0.18 pF 0.14 pF Rp 2600 4470
Tabella 2.2: Dati caratteristici del modello equivalente per i due sensori.
Dalla tabella 2.2 e da quanto accennato in precedenza si conclude che il sensore presenta i seguenti problemi:
• la variazione di capacità indotta dall’aumento di pressione è molto piccola
rispetto alla capacità di offset C0, dovuta alla struttura del sensore. Infatti,
per il sensore con fondoscala da 4 atm, abbiamo una variazione di 24 fF su una capacità a riposo di 192 fF.
• La corrente inversa di saturazione della giunzione è fortemente variabile
con la temperatura.
• La capacità parassita Cj dipende dalla tensione applicata ai capi della
giunzione in inversa.
• La capacità di offset C0 è difficilmente controllabile e anche se usassimo
dei condensatori che possono essere tarati, il loro comportamento sarebbe comunque diverso da quello del sensore.
Per evitare tutti questi inconvenienti è stata ideata una struttura finale che prevede, a fianco del sensore vero e proprio, un sensore di riferimento. Questo consiste in una struttura analoga a quella del sensore vero ma con un foro nella membrana in modo che la pressione interna alla cavità sia uguale a quella esterna. Così facendo si ottiene, per il sensore di riferimento, un valore della capacità molto vicino alla capacità di offset C0 e la struttura globale che ne risulta si presta bene ad una
Regione n Regione p Rp Aria ∆C+C0 Regione n Aria ∆C Rp C0 Aria Regione n
Figura 2.5: struttura finale per il sensore STMicroelettronics.
Grazie alla lettura differenziale vengono risolti in parte i problemi dovuti alla corrente di saturazione inversa della giunzione, alla variazione delle capacità parassite con la tensione applicata al sensore e alla capacità di offset; questi disturbi vengono infatti trasformati in segnali di modo comune e pertanto reiettati, lasciando come errori residui esclusivamente quelli dovuti al “mismatch” tra il sensore vero e quello di riferimento.
2.2. Specifiche di progetto del linearizzatore e
dell’interfaccia di lettura
Il progetto dell’interfaccia di lettura e linearizzazione del sensore di pressione sotto esame, si colloca nell’ambito di una collaborazione fra il gruppo di ricerca microsistemi e sensori del dipartimento di Ingegneria dell’Informazione dell’Università degli Studi di Pisa e l’STMicroelettronics. Il progetto del sistema sarà svolto utilizzando il processo BCD6 0.35 m della stessa STMicroelettronics. Le specifiche di progetto del sistema sono la seguenti:
• interfacciamento del sensore di pressione con range da 0 a 4 atm; • errore relativo massimo ammesso dello 0.4 %;
• variazione della tensione di alimentazione da 2.1 V a 3.6 V; • variazione della temperatura di esercizio da -40 °C a 150 °C;
Nei paragrafi che seguono viene descritto il funzionamento dell’interfaccia di lettura e del linearizzatore nelle due possibili modalità parallelo e sequenziale. Non ci soffermeremo molto sul linearizzatore parallelo mentre il progetto di quello in modalità sequenziale verrà discusso più dettagliatamente poiché il suo progetto è stato portato avanti in questo lavoro di tesi.
2.3. Interfaccia di lettura del sensore
STMicroelettronics
L’interfaccia di lettura del sensore consiste in un convertitore capacità-tensione il quale, applicando una tensione di riferimento raziometrica, permette di ricavare in uscita una tensione anch’essa raziometrica e proporzionale al segnale di capacità. L’interfaccia ha un’uscita fully differential in modo da facilitare le realizzazione dello stadio di linearizzazione a condensatori commutati. Il funzionamento della rete si sviluppa su tre fasi p1, p2 e p3 generate da un generatore a tre fasi non sovrapposte che riceve in ingresso il segnale di clock e un segnale set che serve ad inizializzarlo in modo asincrono. Tale circuito fornisce anche le fasi p12, p23 e p31 ottenute come combinazioni “OR” delle altre e utilizzate dall’intera interfaccia. L’andamento dei segnali di fase è riportato di seguito:
1
p
2p
3p
12p
23p
31p
Con riferimento allo schema circuitale dell’interfaccia riportato in Figura 2.7, si ha che il funzionamento nelle tre fasi p1, p2 e p3 è il seguente:
• fase p1: il circuito si trova nella fase di reset;
• fase p2: il primo amplificatore, costituito da un amplificatore telescopico,
presenta in uscita il segnale utile,v proporzionale alla variazione di capacità del sensore, sommato ad un errore dovuto all’offset dell’amplificatore stesso, al rumore KT/C, all’iniezione di carica, e ad una tensione dovuta all’effetto dell’offset sulla maglia di ingresso; pertanto:
telesc sens e
Vu =V +V
• fase p3: l’amplificatore telescopico presenta in uscita solo la tensione
dovuta agli errori precedentemente menzionati, ovvero :Vutelesc = .Ve
Il secondo amplificatore è pertanto pilotato in modo da effettuare la differenza dei segnali provenienti dal primo amplificatore nelle fasi p2 e p3; inoltre è configurato in modo da precaricare la maglia di uscita alla tensione di offset durante la fase p12 ed cancellarne gli effetti nella fase p3.
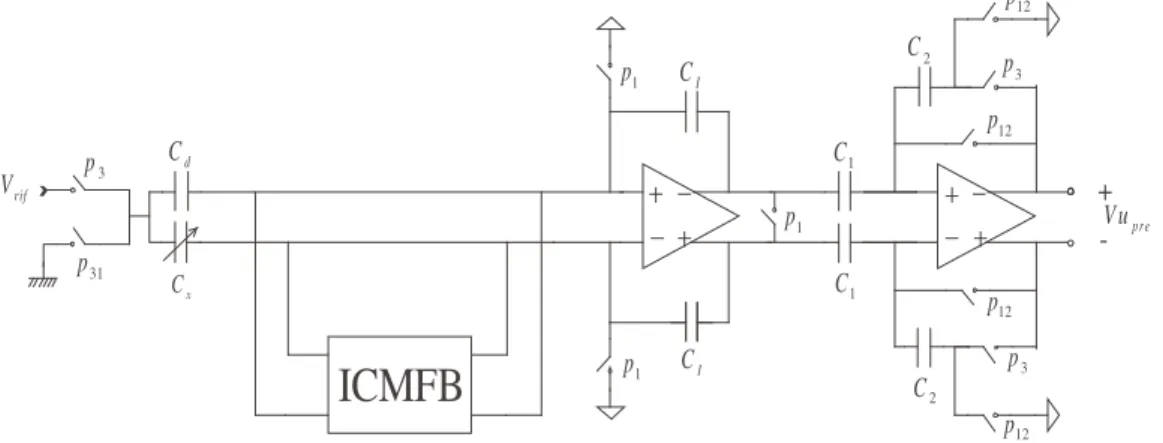
In Figura 2.7 è rappresentato lo schema dell’interfaccia di lettura del sensore
ICMFB
x C rif V p3 31 p d C 1 p 1 p CI I C 1 p 1 C 1 C 2 C 2 C 12 p 12 p 12 p 12 p 3 p + -Vupre 3 pFigura 2.7: interfaccia di lettura del sensore.
dove ICMFB è il sistema di controllo che fissa il modo comune di ingresso del primo amplificatore ad un valore prescelto VCMI, mentre VRIF è una tensione di
riferimento ottenuta “bufferizzando” una frazione della tensione di alimentazione. Più precisamente VRIF =VCMI =Vdd 2 in modo che le giunzioni che si trovano tra i due elettrodi del condensatore non vadano mai in diretta.
2.3.1 Circuito ICMFB
Questo circuito opera chiuso in reazione e serve a mantenere costante il modo comune in ingresso all’amplificatore telescopico; in questo modo assicura anche che la variazione di tensione ai terminali del sensore, durante le fasi p2 e p3, dipenda unicamente dalla tensione di riferimento. La prima fase di funzionamento è una fase di reset in cui le tensioni fissate sui condensatori garantiscono il modo comune desiderato. Nella fase attiva invece, che coincide con la p23, i condensatori CS riportano sul nodo N1 la tensione di modo comune presente in
ingresso. Se questa differisce da quella imposta sul terminale non invertente dell’amplificatore questo reagirà iniettando una carica sui condensatori in uscita CF così da ripristinare in ingresso il valore di modo comune desiderato.
x C F C F C CS CS d C S V rif V 1 V A B 1 N 2 N 1 p 1 p 1 p 1 p
Figura 2.8: schema elettrico dell’ICMFB.
Data la simmetria del circuito per studiare il suo comportamento si può considerare il suo circuito equivalente mostrato in figura.
F C CS d C A c v s v uo v
Per questo vale d F S uo c d F d F C C v v v C +C + C +C = (2.4)
Questa può essere semplificata considerando le seguenti espressioni
uo c v = −Av (2.5) d d F C C C
α
= + (2.6) F d F C C Cβ
= + (2.7) 1 S c v v Aα
β
= + (2.8)Allora, se il guadagno dell’amplificatore è abbastanza grande, si ha
1 c S v v A
α
β
= (2.9)Dimostrando la stabilità della tensione di modo comune per piccoli segnali.
I condensatori CS e CF devono essere implementati con particolare cura. Infatti,
se non vengono realizzati il più possibile uguali, la corrente iniettata nel nodo di uscita non si ripartisce esattamente a metà introducendo un errore sistematico.
2.3.2 Funzionamento dell’interfaccia
Nel descrivere il funzionamento dell’interfaccia eviteremo di riportare il circuito dell’ICMFB ma sappiamo che fissa la tensione del modo comune di ingresso e terremo conto dei disturbi che introduce.
La tecnica di lettura è realizzata su tre fasi in modo da cancellare il rumore kT/C e l’effetto dell’iniezione di carica, dovuto all’ICMFB, sulle capacità del circuito di lettura. Per poter cancellare l’offset, il segnale in uscita dal preamplificatore deve essere letto come differenza fra le fasi p2 e p3; a tal fine è stato progettato il secondo stadio che, inoltre, mantiene il segnale di uscita differenziale.
x C d C A I C 1 A C 1 B C 2B C + -2 A C pre Vu B I C + - - + + - - + + -+ - + -+ -A Vu B Vu
Figura 2.10: : configurazione dell’interfaccia durante la fase p1.
In questa fase i condensatori vengono caricati alle seguenti tensioni (1)
Cd CMI
V =V e (1) (1)
Cx CMI Cd
V =V =V (2.10)
Nella fase p2 il terminale a comune tra il sensore vero e quello fittizio viene portato alla tensione VRIF e il circuito si trova collegato come in figura 2.11.
x C 2D D V d C A I C B I C 2B C 2A C 1A C 1 B C A Vu B Vu pre Vu + -+ -+ -+ -+ -+ -+ -A Q B Q d Q x Q
Figura 2.11: configurazione dell’interfaccia durante la fase p2.
Se indichiamo con Vio1 la tensione di offset del primo amplificatore, con VKTIA la
tensione di rumore campionata da CIA e con QA la carica iniettata dal circuito
ICMFB nel nodo A, allora VuA nella fase p2 può essere scritta come
(2)
(2) 1 (2) 1
2 2
io io A d
A CMI CIA CMI KTIA
I I V V Q Q Vu V V V V C C ∆ ∆ = + + = + + − + (2.11)
Dato inoltre che
(2) (1) 1 ( ) ( ) 2 2 io DD d Cd Cd d CMI CMI d V V Q V V C V V C ∆ = − = + − − (2.12)
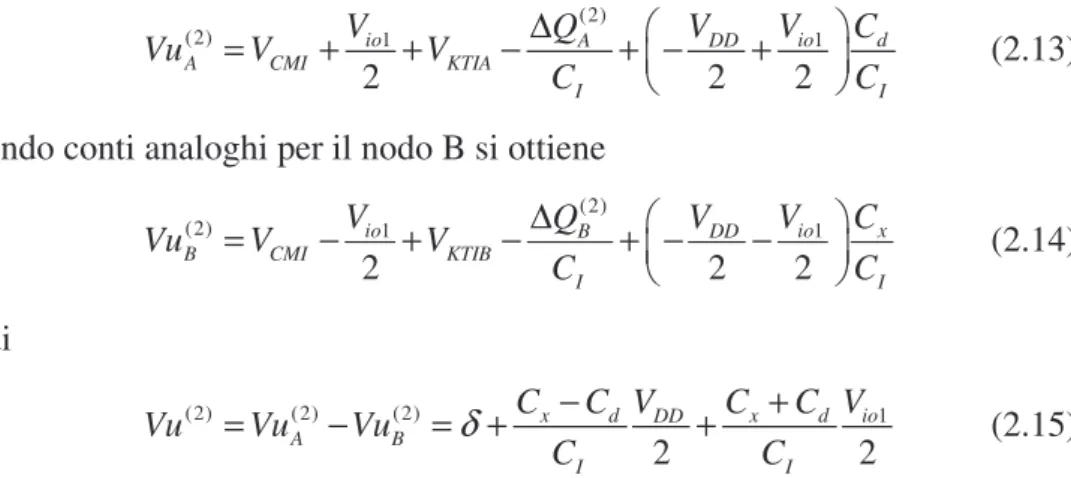
si ottiene (2) (2) 1 1 2 2 2 io A DD io d A CMI KTIA I I V Q V V C Vu V V C C ∆ = + + − + − + (2.13)
Ripentendo conti analoghi per il nodo B si ottiene (2) (2) 1 1 2 2 2 io B DD io x B CMI KTIB I I V Q V V C Vu V V C C ∆ = − + − + − − (2.14) E quindi (2) (2) (2) 1 2 2 x d DD x d io A B I I C C V C C V Vu Vu Vu C C
δ
− + = − = + + (2.15)dove con abbiamo indicato l’effetto del rumore kT/C , dell’iniezione di carica a causa dell’ICMFB e dell’offset all’uscita del primo stadio.
Durante la fase p3 il terminale a comune viene commutato nuovamente a massa.
x C d C A I C B I C 2B C 2 A C 1A C 1 B C A Vu B Vu pre Vu
+
-+
-+
-+
-+
-+
-+
-A Q B Q d Q x QFigura 2.12 : configurazione dell’interfaccia durante la fase p3.
Con la nuova commutazione si ha
(
)
(3) (3) (2) 1 1 2 2 2 2 io io DD DD d Cd Cd d CMI CMI d d V V V V Q V V C V V C C ∆ = − = + − + − = (2.16)(
)
(3) (3) (2) 1 1 2 2 2 2 io io DD DD x Cx Cx x CMI CMI x x V V V V Q V V C V V C C ∆ = − = − − − − = (2.17)quindi la tensione sui condensatori di feedback è
(3) (2) (3)
(3) (2) 1
2 2
d io d
A DD A A
CIA CIA KTIA
I I I I I C V C Q V Q Q V V V C C C C C ∆ ∆ ∆ = − + = − − + (2.18)
(3) (2) (3)
(3) (2) 1
2 2
x io x
B DD B B
CIB CIB KTIB
I I I I I C V C Q V Q Q V V V C C C C C ∆ ∆ ∆ = − + = − − − (2.19) Allora (3) (3) (3) (3) (3) 1 2 io x d A B A B I I V C C Q Q Vu Vu Vu C C
δ
+ ∆ − ∆ = − = + − (2.20)Dall’espressione precedente si nota che, anche in questa fase, ritroviamo sull’uscita e l’effetto della tensione di offset sulla maglia di ingresso. Per eliminare l’effetto di queste tensioni si pone un secondo stadio in cascata al precedente in modo che il segnale utile venga ottenuto come differenza delle tensioni Vu(2)- Vu(3) (3) (3) (2) (3) 2 x d DD A B utile I I C C V Q Q V Vu Vu C C − ∆ − ∆ = − = + (2.21)
La carica iniettata dall’ICMFB nella fase p3 rimane memorizzata nella maglia di uscita ma, supponendo i condensatori CF dell’ICMFB identici, si ha
(3) (3)
A B
Q Q
∆ = ∆ , perciò la carica iniettata è nulla.
Osservando il secondo amplificatore nelle varie fasi, con riferimento alle precedenti figure, si nota che la maglia di uscita viene precaricata alla tensione di offset nella fase p12 e ne vengono cancellati gli effetti nella fase p3. La tensione in uscita al secondo stadio è anch’essa differenziale in modo da garantire un’ottima robustezza rispetto ai disturbi di modo comune. Per quanto detto la sua espressione sarà semplicemente la seguente:
(2,3) (2,3) 1 1 2 A B pre Q Q Vu C ∆ − ∆ = (2.22) dove con (2,3) 1A Q ∆ e (2,3) 1B Q
∆ abbiamo indicato la differenza di carica che passa nei condensatori C1A e C1B nelle fasi p2 e p3. Andando a svolgere i conti si ottiene
(2) 2 (2) 1A CMO2 2io A V V =V + −Vu (2.23) (2) 2 (2) 1 2 2 io B CMO B V V =V − −Vu (2.24) (3) 2 (3) 1A CMI2 2io A V V =V + −Vu (2.25) (3) 2 (3) 1 2 2 io B CMI B V V =V − −Vu (2.26)
Quindi
(
(2) (3))
1 1 2 2 2 x d DD pre I C C C V C Vu Vu Vu C C C − = − = (2.27)I due amplificatori utilizzati sono un amplificatore telescopico e un folded cascode posti in cascata. Infatti l’amplificatore telescopico, a parità di banda e consumo di corrente rispetto ad un folded cascode, ha una tensione di rumore termico riportata in ingresso molto più bassa; per questo motivo il telescopico è stato utilizzato nel primo stadio di lettura, dove il rapporto segnale rumore è di fondamentale importanza per l’intero sistema.
Per il secondo stadio, dato che non abbiamo più la limitazione imposta dal rumore, è possibile scegliere un folded cascode che ci permette di ottenere une dinamica maggiore in uscita.
2.4. Algoritmo di linearizzazione
Per poter rendere lineare la risposta del convertitore capacità tensione bisogna collegare in cascata un blocco che implementi la funzione inversa dell’uscita del sensore. In questo modo il linearizzatore permette di ottenere una risposta complessiva lineare con la pressione.
Da un punto di vista matematico infatti, detta g un’applicazione invertibile tale che
:
g A→B
( ) g y =x
allora, se f è l’applicazione inversa di g, si ha
:
f B→A
( ) f x = y
Quindi data la funzione g e i punti in cui questa è calcolata, per ottenere la funzione inversa basterà scambiarli reciprocamente; a livello grafico questo corrisponde a riflettere la funzione rispetto alla bisettrice.
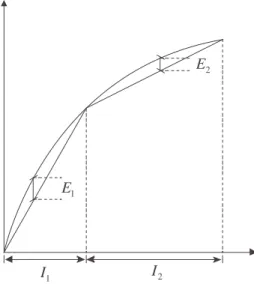
Il blocco linearizzatore è stato realizzato, in un precedente lavoro di tesi, implementando un generatore di funzione PWL (Piece Wise Linear ). Per capirne meglio il funzionamento, in Figura 2.13 è riportata una generica curva f e la spezzata che la approssima, ottenuta con il generatore PWL.
f(y) y 1 E 2 E 1 I I2
Figura 2.13: tecnica PWL per approssimare la curva; sono indicati gli intervalli e gli errori commessi su questi.
La funzione l(y) che approssima con segmenti di curva la f(y) può essere scritta come 1 1 1 1 ( ( ) ( ) ( , ) ( ) i i ( ) i i i i f x f x l y x f x y x x x − − − − − = + − − per 1 1,..., 1 i i x y x i n − ≤ ≤ = +
[
0 1 ... n max]
x= x x yDove x è il vettore dei punti di rottura. L’errore puntuale, in valore assoluto, commesso approssimando f(y) con l(y) è
( , ) ( ( ) ( , ))
E y x =abs f y −l y x
Dovremo quindi decidere il numero dei punti di rottura e la loro posizione tale da ridurre l’errore commesso nei singoli intervalli; per far questo si è scelto di minimizzare l’area tra le curve f(y) e l(y) al variare di xj per j=1,…,n
max max 0 ( , ) ( , ) y x y E
ξ
x dξ
Φ =L’analisi è stata fatta in un precedente lavoro di tesi basandosi sulla curva di risposta del sensore in funzione della variabile adimensionale:
i INT i MAX P P y P − =
con PINT pressione all’interno della cavità e PMAX massima pressione sopportabile
dalla membrana. I calcoli sono stati svolti per il sensore con pressione di fondoscala 4atm ma i risultati possono essere estesi anche a quello con fondoscala 12 atm. Inoltre, per rientrare nelle specifiche dell’interfaccia, l’errore massimo commesso sul singolo intervallo è stato imposto uguale per tutti gli intervalli e minore dello 0.4 % del valore di fondoscala. Si è ottenuto così un numero minimo di punti di rottura necessari pari a 3. Il risultato è riportato in tabella 2.
Numero di punti Pressioni di rottura Massimo errore relativo
3
108.046 Kpa 211.757 Kpa 311.116 Kpa
0.34 %
Tabella 2.3: errore massimo relativo e pressioni ottime per 3 punti di rottura.
Nel paragrafo che segue viene brevemente descritto una possibile implementazione del linearizzatore in modalità parallelo mentre, successivamente verrà discussa in dettaglio la soluzione in modalità sequenziale in quanto è stata quella prescelta per questo lavoro di tesi.
2.5. Linearizzatore PWL in modalità
parallelo
La spezzata che approssima la funzione è ottenuta andando a sovrapporre una semiretta di pendenza Gj ogni volta che viene superato il punto di rottura Vj.
Figura 2.14: curva da realizzare e sua scomposizione come sovrapposizione di più segmenti di retta.
Se il segnale si trova tra Vj e Vj+1 verranno inserite tutte le semirette fino a quella
avente pendenza Gj. L’espressione della tensione d’uscita sarà
(
)
0 n j j j Vu G Vi V = = − (2.28)dove si pone V0 =0 e n =3 per quanto detto prima. Il generatore PWL sarà quindi
costituito da un amplificatore a guadagno variabile e da una batteria di comparatori e generatori di tensioni di riferimento pari al numero di tensioni di rottura, come mostrato in Figura 2.15.
Il generico comparatore j-esimo verifica se Vi V− >j 0 e in caso affermativo il
segnale di uscita Cj corrisponderà all’”1” logico. Il blocco a guadagno variabile
realizza la semiretta di base con pendenza G0 e, se il segnale Cj fornito dal
comparatore j-esimo si trova a livello logico alto, sottrae nel nodo di uscita la tensione G Vi Vj
(
− j)
.0 G 1 G n G Vi 1 V n V Vi 1 V n V out V
Figura 2.15: schema a blocchi del linearizzatore parallelo.
Si intuisce come per il corretto funzionamento del linearizzatore sia di fondamentale importanza che il compartore sia privo di offset. Un errore sulle decisione del livello comporterebbe una caratteristica non monotona. Altrettanto importante è l’errore che può derivare da un errato calcolo di Vi V− j da parte del
blocco AGV; questo causa un errore Verr che si ripercuote su tutti i segmenti
successivi. offset V Vi err V
Figura 2.16: a sinistra un errore dovuto all’offset del comparatore; a destra un errore dovuto all’offset del blocco AGV.
Per questo motivo sia per il linearizzatore in modalità parallelo che per quello descritto nel paragrafo successivo in modalità sequenziale, è stata scelta una topologia circuitale che cancelli l’offset per entrambi i blocchi; questi inoltre utilizzano le stesse tensioni di rottura, generate dal generatore di riferimenti.
2.6. Circuito linearizzatore sequenziale
Nel precedente lavoro di tesi è stata pensata una differente strategia di implementazione del linearizzatore PWL. Utilizzando infatti una macchina sequenziale è possibile ricavare la spezzata, che approssima la curva di nostro interesse, su più cicli di clock. Perciò se abbiamo N punti di rottura e il segnale di ingresso è presente durante la fase p3, dovremo attendere la fine dell’N-esimo colpo di clock della fase p3 per avere il segnale corretto in uscita. Il sistema risulta rallentato ma questo non è un problema vista la piccola banda del segnale di pressione. Si ottiene invece un consumo di corrente più basso e un risparmio di blocchi analogici.
2.6.1 Algoritmo sequenziale e sua implementazione
La caratteristica di trasferimento del sistema, questa volta, è stata resa modulare ed è mostrata in Figura 2.17.
A1(V1)
A2(V2-V1)
A3(V3-V2)
1 2 3 4
Figura 2.17: in alto, caratteristica di trasferimento del sistema sua scomposizione; in basso, sequenza di spezzoni in cui viene decomposta la curva.
La spezzata che approssima la curva di nostro interesse è ricavata come somma di blocchi ottenuti ciascuno traslando il segnale di ingresso di una quantità pari alla tensione di rottura Vj. Se Vi> Vj allora la tensione di uscita del j-esimo blocco
viene incrementata di una quantità massima pari Aj(Vj- Vj-1), altrimenti l’ultimo
tratto è funzione del segnale di ingresso e la sua espressione vale
(
1)
K K
A Vi V− − (2.29)
Dove AK è il guadagno del K-esimo spezzone e VK è tale da soddisfare la
seguente espressione
{
}
max
K j j
V = V Vi V> (2.30)
(
)
(
)
{
}
1 1 1 1 max K j j j K K j K j j Vu A V V A Vi V V V Vi V − − − = = − + − = > (2.31) con V0 = 0.Per implementare questa funzione avremo dunque bisogno di un blocco che generi le quantità Vi- Vj , un comparatore, un amplificatore a guadagno variabile
per realizzare le Aj, uno di accumulazione delle uscite e un’unità di controllo. La
struttura a blocchi è mostrata di seguito.
Logica + 1 Z -V A Vu Vi
Figura 2.18: schema a blocchi del linearizzatore sequenziale.
Il funzionamento del sistema si svolge su tre fasi. Facendo riferimento allo spezzone M-esimo, nelle fasi p3M, p1M, p2M si compiono le seguenti operazioni:
Fase p3M
• Il generatore di riferimenti, che si trova all’estrema sinistra nella figura
precedente, si resetta memorizzando l’offset nelle maglie di ingresso e uscita.
• L’amplificatore a guadagno variabile, se l’uscita del decisore durante la
fase p2 vale 1, mantiene l’uscita sui condensatori di reazione; se invece l’uscita del decisore nella fase precedente valeva 0, somma all’uscita la quantità negativa AM+1
(
Vi V− M+1)
ottenendo(
)
1 1 1 M j j M M j Vu A V A + Vi V + = = ∆ + − (2.32).Fase p1M
• Il generatore di riferimenti genera la tensione Vi-VM, cancellando gli effetti
dell’offset.
• L’amplificatore a guadagno variabile memorizza l’offset e la tensione
M
Vi V− in uscita dal generatore di riferimenti.
• Il comparatore memorizza l’offset nella maglia di ingresso.
Fase p2M
• Il generatore di riferimenti genera la tensione Vi V− M − ∆VM+1 = −Vi VM+1.
• L’amplificatore a guadagno variabile, che si trova ora in ingresso il
segnale Vi V− M+1 ,effettua la differenza con l’ingresso precedente; questa
viene quindi amplificata di un fattore AM+1 e accumulata sull’uscita
generando 1 1 1 M j j M M j Vu A V A + V + = = ∆ + ∆ . • Il comparatore decide: 1 1 1: 0 0 : 0 M M Vi V Vi V + + − > − <
Il procedimento andrà avanti fino a che non si ottiene la tensione di uscita corretta.
2.6.2 Generatore di tensioni di riferimento
Il generatore di riferimenti è realizzato con un amplificatore di carica a cui è posta in ingresso la tensione di alimentazione Vdd; questo permette di ottenere in uscita delle tensioni che siano frazioni proprio della Vdd. L’architettura scelta è sempre differenziale e utilizza un fully differential, così da reiettare meglio i disturbi. Supponiamo di dover realizzare il secondo spezzone.
La fase p3 è la fase di reset e il generatore di riferimenti è collegato in modo da memorizzare l’offset nelle maglie di ingresso e uscita.
B i C A i C A F C B F C 2io C M O V V + + _ + _ + _ A B + _ + _ + _ + _ 1A C 2 A C 1 B C Vi+ _ 2 B C 2 io C M O V V -+ _
Figura 2.19: configurazione del generatore di riferimenti nella fase p3.
Nella fase successiva, la p1, i terminali di ingresso sono tutti collegati alla tensione di modo comune tranne quello del condensatore C1 che serve appunto a
generare le tensione di rottura V1.
B i C A i C A F C B F C +
_
+_
A B +_
+_
1 A C 2A C 1 B C + _ 2B C +_
+_
R Vu +_
+_
VddFigura 2.20: configurazione del generatore di riferimenti nella fase p1.
La differenza di carica nei condensatori C1 e Ci tra le fasi p3 e p1, finisce nel
condensatore di reazione CF durante la fase p1. L’offset viene cancellato e in
uscita troviamo 1 i F F C C Vu Vi Vdd C C = − (2.33)
Scegliendo Ci = CF e V1 =
(
C C Vdd1 F)
si ha1
Vu Vi V= − (2.34)
Sfruttando il ragionamento precedente si capisce che, per ottenere la tensione
1 2 2
Vi V− − ∆ = − , basta commutare a Vdd anche i condensatori CV Vi V 2. Il blocco
genera in uscita la tensione
1 2 i F F F C C C Vu Vi Vdd Vdd C C C = − − (2.35)
Dimensionando C2 in modo che ∆ = − =V2 V V2 1
(
C C Vdd2 F)
si ottiene in uscita2 Vu Vi V= − (2.36) B i C A i C A F C B F C +
_
+_
+_
A B +_
+_
1A C 2A C 1B C + _ 2B C +_
+_
+_
R Vu VddFigura 2.21: configurazione del generatore di riferimenti nella fase p2.
I condensatori sono dimensionati in modo da fornire le seguenti quantità:
1 1 1 0 F C V V V Vdd C ∆ = − = 2 2 2 1 F C V V V Vdd C ∆ = − = 3 3 3 2 F C V V V Vdd C ∆ = − =
Di seguito vengono riportati lo schema circuitale completo del generatore di riferimenti e l’andamento del segnale di uscita in corrispondenza ai segnali di sincronismo che pilotano gli interruttori.
F C F C F C F C 2 C 3 C 3 C Vi+ _ 2 C Vdd Vdd Vdd + _VuR 3 p 3 p 3 p 3 p 12 p 12 p 12 p 12 p 3 p 3 p 1 C 1 C 1 b 1 b 1 nb 1 nb 2 nb 2 nb 2 b 2 b 3 nb 3 nb 3 b 3 b
1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 Vi 1 Vi-V Vi-V1 2 Vi-V Vi-V2 3 Vi-V Vi-V3
b
b
b
1 2 3Vu
Figura 2.23: andamento del segnale di uscita del generatore di riferimenti in corrispondenza dei segnali di sincronismo e delle fasi.
2.6.3 Amplificatore a guadagno variabile e accumulatore
delle uscite
L’amplificatore a guadagno variabile (AGV) ha una struttura analoga a quella vista per il linearizzatore parallelo; in questo caso i guadagni, che vanno decrescendo, si ottengono andando a disinserire man mano i condensatori opportuni tramite interruttori pilotati da segnali digitali. La somma delle tensioni dei vari spezzoni sull’uscita si ricava accumulando carica sui condensatori di reazione CF che vengono scaricati solo all’inizio della procedura. Per evitare che i
di reset, sono stati collegati a dei condensatori CH di mantenimento con i quali
costituiscono sempre una maglia.
Per valutare il funzionamento di tale blocco descriveremo la realizzazione del secondo spezzone ma, per semplificare i calcoli e il disegno, supporremo che l’amplificazione A2 si ottenga con l’inserimento di due sole coppie di
condensatori, C1 e C2 (in realtà dovremmo inserire le coppie C1, C3 e C4 ).
1B C 1A C F C F C 2 io C M O V V + +
_
+_
A B +_
+_
3A C 2 A C 2B C Vi+ _ 3B C 2 io C M O V V -+_
+_
H C H CFigura 2.24: configurazione dell’amplificatore a guadagno variabile nella fase p1.
Nella fase p1, rappresentata nella figura precedente, in ingresso al blocco si trova una tensione di modo comune VCMI più una componente differenziale Vi-V1,
quindi la carica presente nei condensatori di ingresso vale
(
)
1 1 2 2 2 A io CMI CMO V Vi V Q = C C+ V + − − V + (2.37)(
)
1 1 2 2 2 B io CMO CMI V Vi V Q = C C+ V − − V − − (2.38)Nella successiva fase p2 il generatore di riferimenti fornisce in ingresso all’AGV la tensione Vi-V2 ; la variazione di carica che si genera nei condensatori C1 e C2 la
ritroviamo nei condensatori di reazione CF che nel frattempo sono stati collegati
all’uscita. Dunque
(
)
2 1 1 2 2 A V V Q C C − ∆ = − + (2.39)(
)
2 1 1 2 2 B V V Q C C − ∆ = − + (2.40)Come si nota dalle precedenti equazioni i segnali di modo comune di ingresso e uscita,VCMI e VCMO sono stati reiettati dalla struttura differenziale de sistema. La
tensione che viene sommata sull’uscita è
(
1 2) (
)
2 1 2 2 A B F F F C C Q Q Vu V V A V C C C + ∆ ∆ ∆ = − − = − = ∆ (2.41) 1B C 1A C F C F C +_
+_
A B +_
+_
3A C 2A C 2B C + _ 3B C +_
+_
H C H C VuFigura 2.25: configurazione dell’amplificatore a guadagno variabile nella fase p2.
Queste operazioni verranno ripetute finché varrà la condizione Vi V− >j 0. Se, al
contrario, Vi V− <j 0 allora la procedura è terminata e nella successiva fase p3 i
terminali di ingresso del blocco vengono tutti collegati definitivamente alla tensione VCM. Perciò, nel caso che Vi<V2 ,dato che nella fase precedente p2 nei
condensatori di ingresso si aveva la seguente carica
(
)
2 1 2 2 2 A io CMI CMO V Vi V Q = C C+ V + − − V + (2.42)(
)
2 1 2 2 2 B io CMO CMI V Vi V Q = C C+ V − − V − − (2.43)nei condensatori di reazione fluirà una carica
(
)
2 1 2 2 A CM CMI Vi V Q C C V V − ∆ = + − + (2.44)(
)
2 1 2 2 B CMI CM Vi V Q C C V − V ∆ = + − − (2.45)Nella fase p3 andrà quindi a sommarsi sull’uscita la quantità negativa
(
)
(3) 2 2 A B F F Q Q Vu A Vi V C C ∆ ∆ ∆ = − − = − (2.46)In questo modo al passo conclusivo della procedura otteniamo in uscita la variazione
(
)
(
)
(
)
2 2 1 2 2 2 1
Vu A V V A Vi V A Vi V
∆ = − + − = − (2.47)
Le espressioni dei guadagni, calcolate nel precedente lavoro di tesi, sono
(2.48)
Dato che i condensatori CH
risentono fortemente della carica iniettata dagli interruttori pilotati dal segnale pS, è necessario
ricorrere alla tecnica del dummy-switch. La struttura è riportata di seguito.
S p pS S p S np npS S np 1 2 1 12
Figura 2.26: interruttori pilotati dal segnale pS .
Nelle figure che seguono sono riportati lo schema circuitale completo dell’amplificatore a guadagno variabile e l’andamento dell’uscita in corrispondenza dell’ingresso dei segnali di sincronismo nei due casi in cui l’algoritmo di approssimazione venga terminato completamente e nel caso in cui termini al terzo passo.
1 2 3 4 1 1 3 4 2 1 4 3 1 4 F F F F C C C C A C C C C A C C C A C C A C + + + = + + = + = =
1 C 1 C F C F C A B 3 C 2 C 2 C + _ 3 C H C H C Vu 4 C + _Vi res res res res 4 C sub sub _ sub neg S p S p R p R p 2 a 2 a 2 na 2 na 3 na 3 na 3 a 3 a 4 a 4 a 4 na 4 na
Figura 2.27: schema circuitale completo dell’amplificatore a guadagno variabile.
1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 Vi 1 Vi-V Vi-V1 2 Vi-V Vi-V2 3 Vi-V Vi-V3
Vi
( ) 2 2 1 A V -V ( ) 1 1 A V ( ) 3 3 2 A V -V A Vi V4( - 3)a
2a
3a
4Sub
Vu
Figura 2.28: andamento dell’uscita in corrispondenza dei segnali di controllo, nel caso in cui venga terminato l’algoritmo di approssimazione, ovvero Vi>V3.
1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 Vi 1 Vi-V Vi-V1 2 Vi-V Vi-V2 3 Vi-V Vi-V3
Vi
( ) 2 2 1 A V -V ( ) 1 1 A V ( ) 3 3 2 A V -VVu
a
2a
3a
4Sub
( ) 3 2 A Vi V -( ) 3 3 A V -ViFigura 2.29: andamento dell’uscita in corrispondenza dei segnali di controllo, nel caso in cui la procedura termini al terzo passo.
2.6.4 Comparatore
Come accadeva nel linearizzatore parallelo, anche per questo sistema il comparatore è costituito da un decisore con isteresi in cascata ad un preamplificatore. Il preamplificatore cancella il suo offset e, grazie all’elevato guadagno, riduce notevolmente l’offset del decisore (Verr =Vio2 Avol0); l’isteresi
invece è necessaria per far scattare l’uscita del decisore quando ormai il preamplificatore si è sbilanciato nella direzione corretta.
Nella fase p1 il preamplificatore è reazionato: + A C C B C C c in v 2io C M O V V -2io C M O V V + + + +
_
_
Figura 2.30: configurazione del comparatore durnte la fase p1.
Nei condensatori della maglia di ingresso viene memorizzato l’offset e la tensione ai loro terminali sarà
2 A io CM CMO V Vc =V − V − (2.49) 2 B io CMO CM V Vc = V + −V (2.50)
Nella fase p2 in ingresso si trova il segnale fornito dal generatore di riferimenti e il preamplificatore , che adesso è utilizzato in anello aperto, si sbilancia e fa decidere il blocco a valle.
+ A C C + B C C c Vi+ Vi -2io V 2 io V in v
Figura 2.31: configurazione del comparatore durnte la fase p2.
La carica immagazzinata dai condensatori di ingresso non ha vie di fuga, vista l’alta impedenza di ingresso del preamplificatore, quindi
A B
in io
v = −Vi Vc +V −Vc =Vi (2.51)
Nella fase p3 il generatore di riferimenti viene resettato quindi, per evitare che in ingresso al comparatore finiscano segnali non significativi, i due blocchi vengono scollegati. Le capacità parassite all’uscita del preamplificatore e in ingresso al decisore provvederanno a mantenerlo sbilanciato per il tempo necessario a far campionare correttamente l’uscita del decisore.
Il fatto di utilizzare il preamplificatore, con un alto guadagno, in anello aperto lo rende molto sensibile ai segnali in ingresso, compresi quelli non significativi che si presentano tra una fase e un’altra. Per ridurre il problema sono stati usati switch pilotati da segnali non sovrapposti che attenuano l’effetto dell’iniezione di carica. Questa soluzione però non riesce a cancellare l’effetto della carica iniettata dovuto alla componente differenziale del segnale di ingresso. Per attenuare questo disturbo, che può far sbilanciare il preamplificatore nella direzione sbagliata, sono stati inseriti dei condensatori ai terminali di ingresso.
C C C C c Vi+ Vi -C C CC 1 p 1 p 1 p 1 p 2 p 2 p
Figura 2.32: schema elettrico completo del comparatore.
2.6.5 Controllore
Il controllore ha il compito di eseguire le seguenti funzioni:
• Tenere l’informazione relativa al tratto di curva già implementata. • Pilotare il generatore di riferimenti.
• Pilotare l’amplificatore a guadagno variabile.
• Campionare il segnale all’uscita del comparatore alla fine della fase p2.
L’informazione relativa al tratto di curva implementato viene fornita da una rete sequenziale sensibile alla fase p2, che è la fase in cui si implementa realmente il j-esimo spezzone. Il registro contenente lo stato viene resettato alla fine della procedura tramite un segnale Restart_neg che dipende dal valore di Q4 (Q4=1 quando è stato realizzato l’ultimo spezzone) e dall’uscita c del comparatore. Per quanto riguarda il generatore di riferimenti, i segnali bj che pilotano gli
fronte della p2 e successivamente seguono il segnale p12. Per ottenerli basterà quindi fare l’AND del contenuto del registro STAR con la fase p12.
STAR Q1 Q2 Q3 Q4 “1” 2 p 3 np Restart_neg
Figura 2.33: struttura della sottorete per lo stato interno.
L’amplificatore variabile invece è pilotato da segnali aj che dipendono sempre
dallo stato interno ma che sono anche sensibili alla fase p1; inoltre, una volta attivati, devono essere mantenuti fino alla fine della procedura in quanto modificano la topologia del circuito. La struttura necessaria è dunque la seguente:
j a 4 a 3 a 2 a 3 np 1 p Q3 Q2 Q1 Sub_neg Restart 3
Figura 2.34: sottorete che genera in uscita i segnali aj
La rete viene resettata tramite Restart ma, come accade per il sottoblocco precedente, il reset deve avvenire solo alla fine della fase p3. Il segnale sub_neg, normalmente a livello logico alto, passa a zero quando siamo alla fine della
procedura e serve a mantenere l’uscita insensibile a eventuali variazioni dello stato interno.
Per cancellare la carica accumulata dai condensatori di mantenimento delle uscite nell’amplificatore variabile, sono stati previsti degli interruttori opportuni pilotati dal segnale Res.
STAR P12 Comp Restart np2 Sub_neg Sub ps r p 31 p 2 p j b j a Q1 Q2 Q3 Q4 1 b 2 b 3 b 4 b 4 a 3 a 2 a “1” Restart_neg Res np3 np1 10 2 p 3 np 3 np 1 p 4 3
1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 Q 2 Q 3 Q 4 Q 1 b 2 b 3 b 2 a 3 a 4 a Sub Restart