CAPITOLO III
LA FASCIA EMG AD ELETTRODI TESSILI PER LA
CLASSIFICAZIONE DI MOVIMENTI UMANI
3.1 INTRODUZIONE.
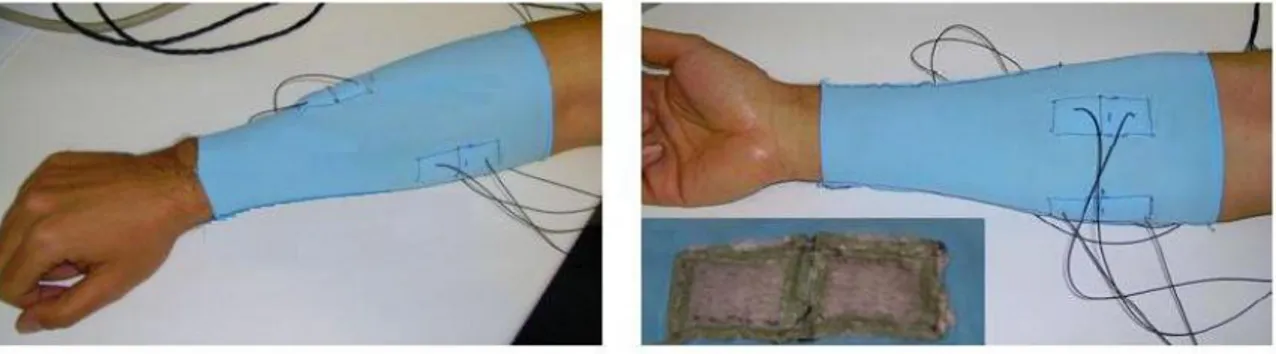
In questo capitolo è affrontata la descrizione dell’hardware realizzato nel lavoro di tesi, ovvero un sistema indossabile costituito da una fascia elastica per l’avambraccio, che fa da supporto a degli elettrodi cutanei su di essa integrati mediante cucitura, che rivelano l’attività muscolare sulla superficie della pelle (Fig. 1). La fascia è realizzata in ®lycra, un materiale che assicura una buona aderenza, evitando l’effetto di scivolamento del tessuto sulla pelle, e con esso degli elettrodi, durante l’esecuzione del movimento, causa di artefatti di moto indesiderati; in più è pratica e veloce da indossare. Partendo dalla scelta del set di movimenti da indagare, attraverso lo studio anatomico e funzionale della muscolatura dell’avambraccio, sono stati individuati i muscoli coinvolti nei movimenti stessi, e, tra questi, in base a considerazioni legate alla tecnica di elettromiografia di superficie, sono stati selezionati i più adatti al nostro scopo di classificazione e si è proceduto a fissare la configurazione degli elettrodi da integrare sulla fascia.
Figura 1. La fascia EMG ad elettrodi tessili con particolare dell’elettrodo della SMARTEX.
3.2 IL SET DI MOVIMENTI STUDIATO. 3.2.1 Muscoli e movimento: il polso e la mano.
La mano è costituita dalle cinque dita, dal palmo e dall’articolazione del polso. Ogni dito ha tre articolazioni (carpo-matacarpica e interfalangee) e 4 gradi di libertà. Il palmo ha molte articolazioni, ma la libertà di movimento è integrata in un solo grado di libertà, mentre l’articolazione del polso ha 3 gradi di libertà. Per realizzare tutti i suoi movimenti, dunque, la mano ha a disposizione 24 gradi di libertà. Escludendo i movimenti particolari delle dita, sono riassunti di seguito i principali movimenti della mano e del polso, con i muscoli principali interessati[31], e sono illustrati nelle Fig. 2-3-4-5-6 e 7:
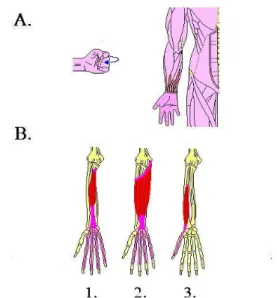
Flessione del polso(Fig. 2A).
- Grande palmare (o Flessore radiale del carpo) (Fig. 2B.1)
- Cubitale anteriore (o Flessore ulnare del carpo) (Fig. 2B.2) - Flessore superficiale delle dita (Fig. 2B.3)
- Flessore profondo delle dita (Fig. 2B.4) Azione secondaria:
- Palmare lungo (Fig. 2B.5) - Palmare breve
- Flessore lungo del pollice (Fig. 2B.6)
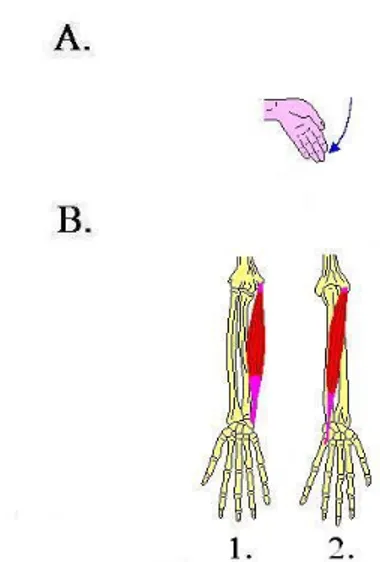
Estensione del polso (Fig. 3A).
- Estensore radiale lungo del carpo (o 1° radiale esterno) (Fig. 3B.1) - Estensore radiale breve del carpo (o 2° radiale esterno) (Fig. 3B.2) - Cubitale posteriore (o Estensore ulnare del carpo) (Fig. 3B.3) Azione secondaria:
- Estensore lungo del pollice (Fig. 3B.4) - Abduttore lungo del pollice (Fig. 3B.5)
Flessione delle dita (Fig. 4A).
- Flessore profondo delle dita (Fig. 4B.1) - Flessore superficiale delle dita (Fig. 4B.2) - Lombricali
- Interossei palmari e dorsali
- Flessore lungo del pollice (Fig. 4B.3)
Estensione delle dita (Fig. 5A).
- Estensore comune delle dita (Fig. 5B.1) - Estensore proprio dell’indice e del mignolo - Lombricali
- Interossei volari
- Estensore lungo del pollice (Fig. 5B.2) - Estensore breve del pollice (Fig. 5B.3)
Abduzione del polso (Fig. 6A).
- Abduttore lungo del pollice (Fig. 6B.1) - Estensore breve del pollice (Fig. 6B.1) - Estensore lungo del pollice (Fig. 6B.1)
- Estensore radiale breve del carpo (o 2° radiale esterno) (Fig. 6B.1) - Estensore radiale lungo del carpo (o 1° radiale esterno) (Fig. 6B.1)
Adduzione del polso (Fig. 7A).
- Cubitale anteriore (o Flessore ulnare del carpo) (Fig. 7B.1) - Cubitale posteriore (o Estensore ulnare del carpo) (Fig. 7B.1)
Figura 2.Movimento di flessione del polso e muscoli coinvolti.
Figura 3. Movimento di estensione del polso e muscoli coinvolti.
Figura 5. Movimento di estensione delle dita e muscoli coinvolti.
Figura 6. Movimento di abduzione del polso e muscoli coinvolti.
3.2.2 La scelta dei movimenti.
Nell’intento di realizzare un’interfaccia uomo-macchina con una buona usabilità, occorre tradurre nella maniera più intuitiva possibile la correlazione “intenzione dell’utente-effetto sulla macchina”. Per questo motivo, oltre alla capacità discriminante del sistema proposto e della tecnica di elaborazione, che sarà oggetto del prossimo capitolo, è stato posto l’accento sulla scelta di movimenti dell’arto superiore semplici da effettuare e che possono intuitivamente essere associati a controlli di dispositivi esterni o a feedback grafici su uno schermo. Nello studio presentato, la scelta è ricaduta su 4 movimenti del polso eseguiti mantenendo lo stato delle dita della mano in flessione (mano chiusa):
1. Estensione. 2. Flessione.
3. Adduzione (o deviazione ulnare). 4. Abduzione (o deviazione radiale). I movimenti sono mostrati in Fig. 8.
Figura 8. I 4 movimenti del polso esaminati: a) estensione; b) flessione; c) abduzione; d) adduzione.
3.3 GLI ELETTRODI EMG CUTANEI. 3.3.1 Gli elettrodi cutanei standard.
Gli elettrodi sono i sensori che trasformano le correnti ioniche circolanti all’interno del corpo umano in correnti elettroniche all’interno di conduttori metallici. Ciò avviene per mezzo di reazioni di ossido-riduzione all’interfaccia tra il sistema fisiologico e l’elettrodo stesso. I primi modelli di elettrodi cutanei, o superficiali, erano di rame o di acciaio inossidabile, e conducevano la corrente sulla pelle per mezzo di spugnette imbevute di soluzione salina. Per ovviare ai numerosi inconvenienti che questi dispositivi comportavano, furono introdotti elettrodi di gomma conduttiva che venivano spalmati di gel conduttivo sulla faccia a contatto con la cute ed erano trattenuti in posizione sul muscolo con bande elastiche. Attualmente, i tipi di elettrodi cutanei standard comunemente più usati sono il Ag/AgCl “usa e getta” Red Dot monopolare (Fig. 7a), dalla forma a disco, realizzato in morbido elastomero dotato su una faccia di gel conduttivo autoadesivo e il
bipolare (due elettrodi monopolari metallici chiusi nello stesso package) solitamente rettangolare e di uso permanente, che può essere fissato alla superficie della pelle con del comune nastro adesivo (Fig. 7b).
Figura 9.Elettrodi cutanei standard per EMG: Red Dot (a) e bipolari (b).
Tutti gli elettrodi di superficie (cutanei) sono elettrodi passivi che rilevano il valor medio del potenziale alla superficie di contatto. Si parla di valor medio dato che la superficie dell’elettrodo, limitatamente al segnale EMG, può essere approssimata come equipotenziale, pertanto le correnti circolanti verranno mediate dalle resistenze di contatto a generare un potenziale ed una corrente unici. Come già esposto nel primo capitolo, tali elettrodi sono particolarmente indicati quando si vuole rilevare l’attività globale di un muscolo, sono non invasivi ed adatti in applicazioni in cui sia necessario un bio-feedback, non provocano fastidi a soggetti sensibili o ai bambini. I principali svantaggi sono: il non buon contatto elettrico tra elettrodo e pelle, in quanto la resistenza di contatto è elevata ed il contatto meccanico può essere non uniforme, ragione per cui sono state introdotte delle paste saline di interfacciamento (gel altamente conduttivi); la buona rilevazione dell’attività dei soli muscoli superficiali, non dei muscoli più piccoli; una limitata discriminazione dell’attività di singole unità motorie.
3.3.2 Gli elettrodi tessili SMARTEX.
Lo scopo è quello di riuscire a registrare segnali elettromiografici, in condizioni di riposo o dinamiche, utilizzando dei tessuti ‘sensibili’, con alta vestibilità, termine, questo, che sta ad indicare la proprietà di non invasività e di aderenza, o fedeltà tra la superficie oggetto di misura e la superficie dell’elettrodo. La possibilità di usare elettrodi di questo tipo deriva dal significativo sviluppo del wearable, ossia di sistemi elettronici indossabili già largamente impiegati nella monitorizzazione del movimento attraverso l’estrazione di informazione dai segnali biologici [32]. La loro forza innovativa sta nel superamento delle restrizioni d’ingombro e poca flessibilità, legate all’elettronica ‘on body’ di vecchia generazione, e nelle grandi potenzialità di nuovi materiali polimerici tessuti direttamente nella stoffa, o stampati sui tessuti stessi, che sono il risultato di progressi nell’industria tessile, nell’ingegneria elettronica e nelle scienze dei materiali. Il movimento, inoltre, viene registrato nella sua esecuzione naturale, senza vincoli perturbanti e quantificato con l’estrazione di diversi parametri, come, ad esempio, cinematici, dinamici, biologici. Gli elettrodi utilizzati per il sistema indossabile sviluppato in questa tesi sono elettrodi tessili prodotti dall’azienda SMARTEX S.r.l.[33]. Essi sono ottenuti a partire da un filo costituito da un’anima di filo viscoso (Elitè, di Lineapiù S.p.A, Italia) attorno a cui sono intrecciati due fili di acciaio inossidabile. Gli elettrodi sono lavorati a maglia mediante una macchina rettilinea da maglieria, con la tecnica di intarsio tubolare, che conferisce loro una doppia faccia, con la parte
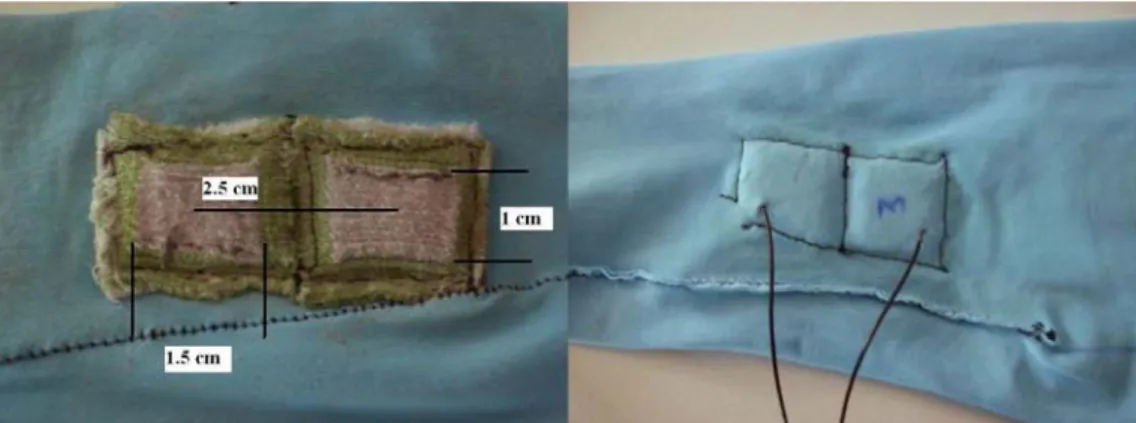
esterna non conduttiva, in modo da isolare l’elettrodo dall’ambiente circostante[34]. Gli elettrodi si prestano ad essere ripetutamente lavati con acqua, o con soluzioni acquose, senza deterioramento delle loro prestazioni. Sia in analisi a riposo che in condizioni dinamiche può essere applicata sulla faccia sensibile del gel altamente conduttivo, o speciali membrane hydrogel della ST&D (Belfast, UK) con l’effetto di migliorare l’accoppiamento elettrico con la superficie della pelle riducendo la resistenza di contatto. Questi elettrodi sono stati già impiegati nella registrazione di segnali elettromiografici, ma relativamente a grandi muscoli e di grandi dimensioni[35]. In questa tesi sono stati impiegati 6 elettrodi tessili del tipo appena descritto in configurazione bipolare: un elettrodo bipolare è costituito da due elettrodi tessili cuciti vicini per i bordi. La superficie sensibile del singolo elettrodo è rettangolare, di dimensioni 1.5 cm × 1 cm (Fig. 10). L’area e la forma della superficie sensibile degli elettrodi sono parametri molto importanti nella registrazione dei segnali EMG, in quanto determinano la quantità di unità motorie attive in virtù del numero di fibre muscolari nelle loro vicinanze. Dunque, elettrodi più grandi registrano maggiore quantità di segnale mioelettrico, ma conta anche la dimensione del muscolo indagato: elettrodi grandi su piccoli muscoli, infatti, registrano anche segnali indesiderati di crosstalk o di altra fonte biologica vicina. Altro parametro che influisce sul segnale EMG è la distanza interelettrodica, intesa come la distanza tra i centri geometrici delle superfici sensibili di due elettrodi. Tale parametro determina la larghezza della banda della configurazione differenziale degli elettrodi. Nel caso specifico, la distanza interelettrodica è pari a 2.5 cm (Fig. 10). Gli elettrodi bipolari sono stati cuciti su una fascia per l’avambraccio in ®lycra, volendo realizzare una buona coniugazione tra indossabilità ed accettabile qualità del segnale.
Figura 10. La geometria dell’elettrodo SMARTEX e il particolare della faccia superiore isolata.
3.4 LA CONFIGURAZIONE ELETTRODICA.
Lo studio della disposizione degli elettrodi sulla pelle e la conseguente configurazione da assegnare loro sulla fascia, ha rappresentato una fase molto importante della progettazione del sistema sensibile EMG. Riprendendo quanto esposto nel primo capitolo, oltre che dai fattori geometrici degli elettrodi di cui al paragrafo precedente, i segnali EMG sono influenzati da fattori quali: la posizione degli elettrodi rispetto ai punti motori (zone d’innervazione) ed alle giunzioni tendinee, con ripercussioni sulle caratteristiche d’ampiezza e di frequenza del segnale rilevato; la posizione degli elettrodi sulla superficie rispetto al confine laterale del muscolo, che determina l’entità del
crosstalk che l’elettrodo può rilevare; infine, l’orientazione degli elettrodi rispetto alla direzione
delle fibre, che influisce sulla misura della velocità di conduzione dei potenziali d’azione e, quindi, sull’ampiezza e sul contenuto frequenziale del segnale[35]. In accordo agli standard della tecnica di elettromiografia di superficie, gli accorgimenti basilari nell’applicazione degli elettrodi cutanei sulla
superficie della pelle, che consentono la migliore qualità della registrazione dei segnali mioelettrici sono:
1. Lontano dalla zona di innervazione . 2. Lontano dal tendine.
3. lontano dal confine laterale del muscolo (che è la zona più vicina ad altri muscoli). 4. Con orientazione parallela alla direzione delle fibre.
5. Preferibilmente al centro del ventre muscolare.
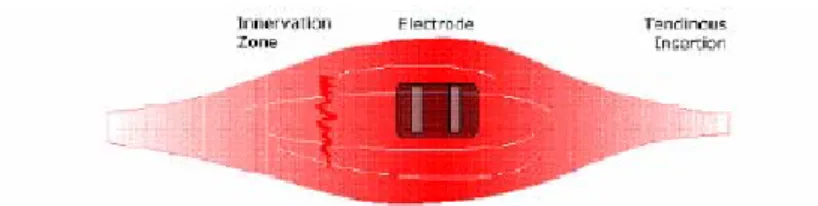
Nelle Fig. 11 e12 sono mostrati, rispettivamente, la posizione ideale di un elettrodo superficiale per EMG rispetto al muscolo da investigare e gli effetti di piazzamenti non ottimali sull’ampiezza e sullo spettro del segnale rilevato.
Figura 11.La posizione preferita per l’elettrodo: tra il punto di innervazione e l’inserzione tendinea, al centro del ventre muscolare e orientato parallelamente alla direzione delle fibre
Figura 12.Effetti del posizionamento dell’elettrodo vicino alla zona tendinea (in basso), vicino alla zona d’innervazione (in alto) e
vicino al confine laterale del muscolo (a destra) su ampiezza e spettro del segnale EMG rilevato. La posizione al centro del ventre muscolare (al centro) risulta essere quella preferibile, in corrispondenza della quale si rileva la massima ampiezza del segnale EMG.
Lo stato attuale della tecnologia degli elettrodi tessili utilizzati, che ne limita le dimensioni minime e la presenza nell’avambraccio di muscoli non eccessivamente grandi e molto ravvicinati fra loro, ha affetto non poco l’individuazione dei repere anatomici superficiali più adatti alla rilevazione, volendo soddisfare le condizioni sopra elencate. Una prima selezione è stata condotta rinunciando ai
muscoli più profondi, in considerazione del fatto che la SEMG meglio si adatta a “sentire” l’attività dei muscoli superficiali. Considerando i gruppi muscolari impegnati in ognuno dei 4 movimenti allo studio, i siti superficiali sono stati fissati nella zona centrale del muscolo più grande e orientati parallelamente alla direzione delle sue fibre, oppure quanto più al centro del complesso muscolare coinvolto (considerato come un unico muscolo) e orientati parallelamente alla direzione dominante delle fibre (Fig. 13-14 -15 e 16). La condizione di lontananza dai confini laterali del muscolo è stata resa inapplicabile dalle su citate restrizioni geometriche degli elettrodi ed anatomiche dei muscoli.
Figura 13.Repere anatomico relativo al movimento di estensione del polso posizionato al centro del muscolo CUBITALE
POSTERIORE.
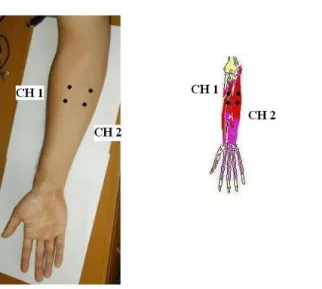
Figura 14.Repere anatomici relativi al movimento di flessione del polso. CH1 posizionato al centro del complesso comprendente GRANDE PALMARE, CUBITALE ANTERIORE e PALMARE LUNGO. CH2 posizionato al centro del complesso che include FLESSORE SUPERFICIALE DELLE DITA e FLESSORE LUNGO DEL POLLICE.
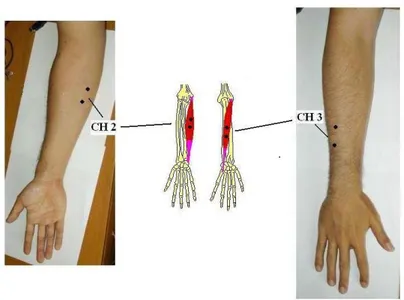
Figura 15.Repere anatomici relativi al movimento di adduzione del polso.CH2 posizionato al centro del CUBITALE ANTERIORE e
CH3 posizionato al centro del CUBITALE POSTERIORE.
Figura 16.Repere anatomico relativo al movimento di abduzione del polso posto al centro del complesso ABDUTTORE LUNGO DEL POLLICE ed ESTENSORE BREVE e LUNGO DEL POLLICE.
3.5 IL SISTEMA DI ACQUISIZIONE
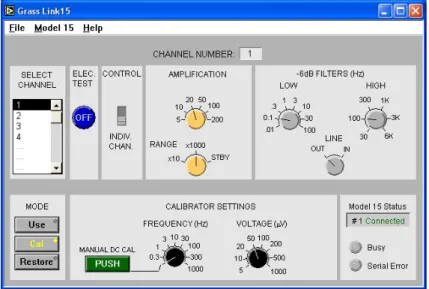
Per l’acquisizione sono stati utilizzati una scheda PCI-6062E DAQ a 12 bit della National Instruments (NI)[37] ed un sistema amplificatore GRASS modello 15LT Physiodata[38], progettato appositamente per lavorare su segnali biologici (es. EEG e EMG), dotato di un software mediante il quale, su personal computer, è possibile controllare tutte le funzioni dell’amplificatore, inclusi il
guadagno del singolo amplificatore, i filtri passa alto e passa basso, la calibrazione ed altre funzioni speciali come il test degli elettrodi. Nelle Fig. 17-18 sono mostrati, rispettivamente, il complesso dell’hardware impiegato (la scheda NI è inserita nello slot PCI del computer) e l’interfaccia software del Grass per i settings.
Figura 17. L’hardware della tesi: il GRASS, la fascia EMG, i collegamenti alla scheda NI.