CAPITOLO 4
MODELLI DI DISPERSIONE
ATMOSFERICA
Le emissioni gassose di impianti per il trattamento e lo smaltimento dei rifiuti possono causare alterazioni della qualità dell’aria non solo nelle immediate vicinanze della sorgente, ma anche nelle zone limitrofe. L’effetto complessivo è strettamente dipendente, oltre che da natura e quantità degli effluenti, da condizioni meteorologiche e caratteristiche geofisiche del sito, che contribuiscono a definire le modalità di trasporto, diffusione e ricaduta al suolo degli inquinanti. Fattori come velocità e direzione del vento, profilo di temperatura, radiazione solare, umidità, rendono estremamente variabile questo effetto, non solo nell’arco dell’anno, per l’alternarsi delle stagioni, ma anche da giorno a giorno [61].
Al fine di comprendere meglio i fenomeni che influenzano la dispersione degli inquinanti ed il loro impatto sull’ambiente circostante, nella prima parte di questo capitolo, vengono brevemente introdotte struttura e dinamica dell’atmosfera, e poi descritte le caratteristiche dello strato limite terrestre, ovvero la fascia di atmosfera più vicina al suolo, direttamente influenzata dalle attività antropiche.
Nella seconda parte vengono descritti i principi su cui si basano i modelli di dispersione atmosferica. Essi forniscono i codici per il calcolo della concentrazione di inquinante nell’area intorno ad una o più fonti emissive, attraverso lo sviluppo di algoritmi che descrivono il moto dell’effluente (trasporto e diffusione) e fenomeni atmosferici di vario tipo, come deposizione (secca e umida) e reazione – trasformazione chimica. In particolare vengono descritte due categorie di modelli, particolarmente diffuse per lo studio della qualità dell’aria: i modelli stazionari a pennacchio gaussiano e i modelli tridimensionali “a puff”. Proprio a quest’ultima categoria appartiene il sistema modellistico scelto per lo studio descritto nel Capitolo 6, “CALPUFF Model System”, che pertanto verrà dettagliatamente descritto nella parte finale del capitolo.
4.1 L’ATMOSFERA
4.1.1 STRUTTURA E DINAMICA DELL’ATMOSFERA
L’atmosfera è uno strato formato da gas e particelle in sospensione che avvolge la terra e ne influenza le condizioni ambientali. A causa della sua disomogeneità, è necessario effettuare una opportuna classificazione per differenziare i vari strati con diverse caratteristiche, che nell’insieme definiscono la struttura dell’atmosfera [62].
Il primo strato è la Troposfera, una fascia di circa 10 Km in cui si hanno le perturbazioni meteorologiche e si avvertono gli effetti dell’attività umana. In essa è concentrata quasi tutta la massa gassosa e il vapore acqueo, pertanto tale strato costituisce la fascia più densa dell’intera atmosfera. La sua composizione è caratterizzata per il 99% da azoto ed ossigeno molecolari e per il restante 1% da una vasta serie di gas tra cui predomina l’argon. E’ la terra stessa che
fornisce (o sottrae) calore a questo strato ed è per questo motivo che la temperatura diminuisce con la quota (gradiente termico verticale negativo).
Lo strato compreso tra 10 e 50 Km costituisce la Stratosfera, in cui il gradiente termico si inverte diventando positivo (la temperatura aumenta con la quota), e dove i componenti gassosi sono più rarefatti, con umidità e polveri quasi del tutto assenti. Nella Tropopausa, sottile fascia che fa da cuscinetto tra Troposfera e Stratosfera, la temperatura rimane praticamente costante fino a circa 20-25 Km. A questa altezza avviene l’inversione del gradiente, a causa dell’ozono che assorbe una certa quantità di calore (radiazione ultravioletta dannosa per l’uomo).
La Mesosfera, separata dalla Stratosfera dalla fascia di transizione denominata Stratopausa, che si estende tra 50 e 90 Km di altezza, è caratterizzata da un’ulteriore rarefazione dei gas con un aumento graduale di quelli leggeri a scapito di quelli più pesanti. Il gradiente termico verticale torna ad essere negativo e intorno ai 90 Km di altezza la temperatura ha valori compresi tra -70 e -90 °C.
Nella Termosfera si ha una nuova inversione del gradiente termico verticale, che torna positivo e porta i valori di temperatura dai 90 °C sotto zero della Mesopausa (fascia di transizione con la Mesosfera) a valori compresi tra +1000 – 2000°C, a 500 Km di altezza, quota fino a cui si estende lo strato. Temperature così elevate sono dovute all’assorbimento della radiazione solare da parte dell’ossigeno atomico che si ionizza, e per questo la parte superiore di questo strato si chiama Ionosfera. I gas presenti subiscono una ulteriore rarefazione.
La parte più esterna dell’atmosfera terrestre è la Esosfera, costituita da vari sottostrati con altrettante inversioni termiche.
La causa predominante della dinamica atmosferica è rappresentata dalla radiazione solare e quindi dal riscaldamento terreste. L’energia radiante che raggiunge il pianeta non è però costante, e questo si traduce in differenze di pressione e temperatura [62].
I moti atmosferici seguono le leggi fisiche di conservazione di massa, quantità di moto ed energia; le forze in gioco sono di volume (forze gravitazionali) e di superficie (forze da gradiente di pressione e forze di attrito). Se inoltre il movimento viene considerato rispetto ad un sistema di riferimento in rotazione con la terra, si dovrà tener conto anche delle forze apparenti quali quella di Coriolis e quella centrifuga.
Le equazioni che descrivono i moti delle masse d’aria e degli effluenti di sorgenti inquinanti sono estremamente complesse. Tuttavia, è possibile semplificare il problema effettuando un’analisi di scala, cioè stimando quali termini portano un contributo determinante ad un dato fenomeno, in base alle fluttuazioni nella scala del tempo e dello spazio che si considerano. Poiché i fenomeni che avvengono con lunghezza di scala orizzontale di pochi chilometri hanno
una scala dei tempi breve, è possibile trascurare i termini dovuti alla rotazione terrestre. Inoltre, si possono effettuare una serie di assunzioni per semplificare ulteriormente i sistemi di complesse equazioni che descrivono il moto atmosferico degli inquinanti.
4.1.2 GRADIENTE TERMICO ADIABATICO E STABILITÀ ATMOSFERICA
La dispersione degli inquinanti in aria è in buona parte determinata dalle condizioni di stabilità o instabilità dell’atmosfera, che dipendono, in ultima analisi, dall’andamento della temperatura dell’aria con la quota.
Si supponga di isolare un volume infinitesimo d’aria (che chiameremo “particella adiabatica”) caratterizzato da valori di pressione p’, temperatura T’, densità ρ’, dall’aria ambiente (caratterizzata dai rispettivi valori p, T e ρ). La particella si trova ad una quota z’ e effettua uno spostamento dz’. Durante lo spostamento si può assumere p=p’ e il processo può essere considerato adiabatico, poiché il tempo impiegato in questo spostamento è molto inferiore al tempo necessario perché avvengano scambi di calore tra la particella e l’ambiente circostante. Inoltre, per piccoli spostamenti, si può assumere che la variazione di temperatura con la quota sia lineare, e quindi esprimibile mediante le seguenti relazioni [62]:
• per l’aria ambiente: T = T0 + Γ × z’ – T0 = valore imperturbato della temperatura,
– Γ = gradiente termico verticale dell’aria (variazione della temperatura in funzione della quota);
• per la particella: T’=T0 + Γ’ × z’
– T0 = temperatura alla quota iniziale (z’), prima che la perturbazione provochi lo
spostamento (adiabatico) della particella,
– Γ ’ = gradiente termico adiabatico della particella in funzione della quota, il cui valore nella troposfera, facendo l’ipotesi di atmosfera statica e senza umidità, è:
Γ’ = , C/ m dz
dT =− °
00976
0 (4.1)
che corrisponde ad una diminuzione di temperatura di circa 1°C ogni 100 metri.
Il gradiente termico adiabatico secco (Γ ’) rappresenta il termine di paragone con cui confrontare il gradiente termico reale dell’aria (Γ ), allo scopo di definire lo stato di stabilità dell’atmosfera.
Sono possibili i seguenti casi [61]:
• Γ > Γ ’
→
gradiente subadiabatico (meno negativo di quello adiabatico o addirittura positivo nel caso delle inversioni termiche): l’aria si raffredda più lentamente con la quota rispetto al gradiente termico adiabatico e sono quindi ostacolati i moti di mescolamento verticale: una ipotetica particella, salendo adiabaticamente (senza scambi di calore con l’aria circostante), si trova ad una temperatura minore (densità maggiore) dell’aria ambiente, e quindi tenderà a scendere per recuperare la posizione iniziale (equilibrio stabile);• Γ = Γ ’
→
gradiente adiabatico: muovendo l’ipotetica particella verso l’alto o verso il basso, la sua temperatura cambia con lo stesso andamento del gradiente dell’aria circostante e quindi su di essa non agisce alcuna forza (equilibrio neutro);• Γ < Γ ’
→
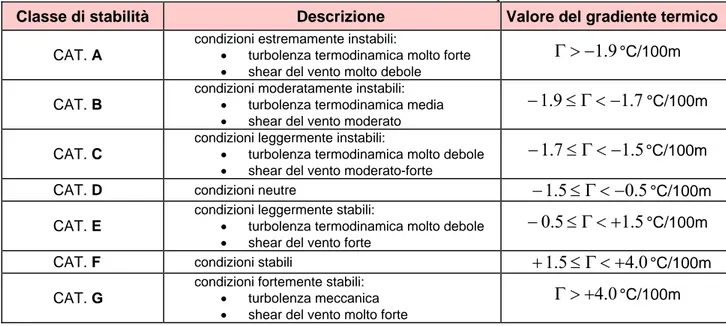
gradiente superadiabatico: l’aria si raffredda più rapidamente con la quota rispetto al gradiente termico adiabatico: la particella, salendo, si trova ad una temperatura superiore rispetto all’aria circostante e quindi, avendo densità inferiore, tende a salire ancora, allontanandosi sempre di più dal punto di partenza (equilibrio instabile).Pasquill ha definito sei classi di stabilità atmosferica (successivamente portate a sette), dalla A, la più instabile, alla F (o G), la più stabile, in relazione con il valore del gradiente termico (Figura 4.1) [63].
Il metodo più corretto per la valutazione del grado di stabilità dell’atmosfera è la determinazione continua del gradiente termico verticale, fino ad una ragionevole altezza dal suolo, per poi procedere alla classificazione dei dati ottenuti secondo opportuni intervalli di valori di Γ rispetto all’adiabatica. La Tabella 4.1 riporta la classificazione della stabilità atmosferica secondo il solo gradiente termico. Questo metodo però presenta notevoli difficoltà di realizzazione e richiede particolari strumentazioni, pertanto è raramente seguito (per esempio da ENEL e Aeronautica Militare).
Tabella 4.1: classi di stabilità secondo Pasquill
Classe di stabilità Descrizione Valore del gradiente termico
CAT. A
condizioni estremamente instabili:
• turbolenza termodinamica molto forte • shear del vento molto debole
9 . 1 − > Γ °C/100m CAT. B
condizioni moderatamente instabili: • turbolenza termodinamica media • shear del vento moderato
7 . 1 9 . 1 ≤Γ<− − °C/100m CAT. C
condizioni leggermente instabili:
• turbolenza termodinamica molto debole • shear del vento moderato-forte
5 . 1 7 . 1 ≤Γ<− − °C/100m
CAT. D condizioni neutre −1.5≤Γ<−0.5°C/100m
CAT. E
condizioni leggermente stabili:
• turbolenza termodinamica molto debole • shear del vento forte
5 . 1 5 . 0 ≤Γ<+ − °C/100m
CAT. F condizioni stabili +1.5≤Γ<+4.0°C/100m
CAT. G
condizioni fortemente stabili: • turbolenza meccanica • shear del vento molto forte
0 . 4 + > Γ °C/100m
In alternativa, si può impiegare una metodologia che consiste nell’attribuire un valore di stabilità, uniforme in tutto lo strato di atmosfera, utilizzando i dati disponibili al suolo. Il metodo di Pasquill, che prevede le categorie di stabilità riportate sopra, propone le Tabelle 4.2 e 4.3 per la corrispondenza delle classi di stabilità a diverse condizioni d’insolazione e di vento, rispettivamente di giorno e di notte [62].
Tabella 4.2: Classe di stabilità in funzione di velocità del vento e irraggiamento solare (GIORNO)
IRRAGGIAMENTO SOLARE (Watt/m2)
VENTO AL SUOLO (a 10 m) >700 700-540 540-400 400-270 270-140 <140 <2 m/s A A B B C D 2-3 m/s A B B B C D 3-4 m/s B B B C C D 4-5 m/s B B C C D D 5-6 m/s C C C C D D >6 m/s C C D D D D
Tabella 4.3: Classe di stabilità in funzione di velocità del vento e irraggiamento solare (NOTTE) IRRAGGIAMENTO (Watt/m2) VENTO AL SUOLO (a 10 m) > -20 -20 / -40 > -40 <2 m/s D F F 2-3 m/s D E F 3-5 m/s D D E 5-6 m/s D D D >6 m/s D D D
Condizioni di stabilità si presentano durante le notti con cielo sereno e vento assente o debole, con il suolo che irradia calore e si raffredda più rapidamente degli strati superiori dell’aria. Condizioni di atmosfera instabile si presentano invece nel caso in cui di giorno il cielo sia sereno ed il vento sia assente o estremamente debole, poiché il suolo assorbe di più la radiazione solare, si scalda quindi più rapidamente dell’aria e riscalda a sua volta l’aria sovrastante.
Atmosfera (approssimativamente) neutra, infine, si ritrova normalmente con cielo coperto, che di giorno impedisce l’irraggiamento del sole verso il terreno e di notte quello del terreno verso l’alto, oppure con cielo sereno (di giorno o di notte) ma con vento sufficientemente forte da rimescolare gli strati prossimi al terreno [64].
4.1.3 INVERSIONI TERMICHE
Inversione termica è il termine generale che si usa per indicare strati di atmosfera in cui il gradiente termico verticale si inverte, diventando positivo, e la temperatura aumenta con la quota. Generalmente questo fenomeno ha effetto negativo sulla qualità dell’aria, specialmente quando l’emissione di inquinanti avviene al di sotto della base dell’inversione, che funge da tappo alla dispersione verso l’alta atmosfera e può provocare concentrazioni al suolo elevate. Quando invece l’emissione avviene al di sopra dello strato di inversione, esso funge da protezione, ostacolando la ricaduta al suolo dell’inquinante [65].
Esistono diverse cause di inversione termica, ma solo due sono rilevanti per la qualità dell’aria: • Inversione termica per radiazione: durante la notte, la superficie della terra si raffredda
emanando energia di radiazione verso lo spazio. Nelle notti nuvolose, la radiazione terrestre tende ad essere assorbita dal vapore acqueo presente in atmosfera, ed in parte viene riemessa verso il suolo. Nelle notti serene, essa viene trasmessa senza ostacolo nello spazio e quindi il suolo si raffredda più rapidamente. Contemporaneamente al raffreddamento del suolo si ha il progressivo riscaldamento degli strati d’aria sovrastanti. Si verificano quindi situazioni in cui l’aria appena sopra il terreno risulta più fredda di
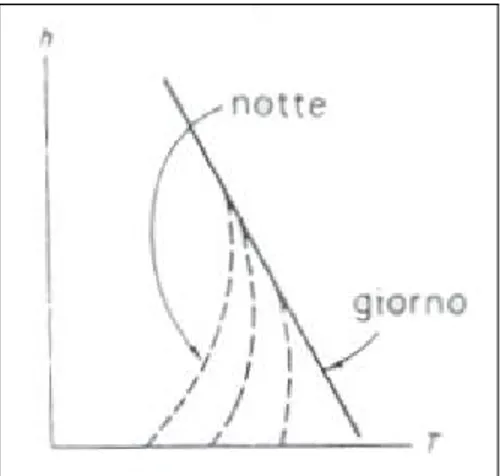
quella che si trova ancora al di sopra, creando l’inversione. L’inversione termica ha inizio al crepuscolo e, con il progredire della notte, la sua altezza dal suolo aumenta fino a raggiungere qualche migliaio di metri, poco prima che arrivi il mattino ed il sole torni a scaldare il terreno. Durante il giorno, il progressivo aumento d’intensità dell’irraggiamento solare provoca lo smantellamento dello strato di inversione, e il gradiente termico torna gradualmente ad essere negativo (Figura 4.2);
Figura 4.2: Smantellamento dell’inversione termica al suolo
• Inversione termica per subsidenza: questo tipo di inversione, contrariamente a quella dovuta alla radiazione, è un fenomeno che può durare per mesi, avviene a quote più elevate ed è più comune in estate. L’inversione per subsidenza è associata a condizioni meteorologiche di alta pressione conosciute come anticicloniche: si ha un sistema circolatorio verticale di masse d’aria, per cui l’aria al centro, scendendo, va incontro a condizioni di maggior pressione, e quindi si comprime e si scalda, venendosi a trovare ad una temperatura maggiore rispetto all’aria sottostante. Il risultato è un’inversione in quota che dura per tutto il tempo che le condizioni di alta pressione persistono.
4.2 CARATTERISTICHE DELLO STRATO LIMITE TERRESTRE
Lo strato limite terrestre, PBL (Planetary Boundary Layer), è definito come la parte della Troposfera, immediatamente al di sopra del terreno, direttamente influenzata dalla superficie terrestre, e che risponde alle seguenti forzanti superficiali [66]:
• resistenza aerodinamica, causata dalla forza d’attrito viscoso;
• trasferimento di calore, evaporazione e traspirazione da e verso il suolo; • modificazioni del flusso d’aria indotte dalla morfologia del terreno;
4.2.1 FLUSSO D’ARIA NEL PBL
Il flusso d’aria nel PBL, può essere suddiviso in tre componenti principali: vento medio, onde, turbolenza. Nella Figura 4.3 sono rappresentate le tre componenti isolate, ciascuna delle quali può esistere separatamente o in parziale presenza delle altre.
Figura 4.3: Componenti del PBL: (a)vento medio, (b)onde e (c)turbolenza
Il vento medio è responsabile del rapido trasporto orizzontale (avvezione), con valori di velocità generalmente compresi nell’intervallo 2-10 m/s. L’attrito con il terreno causa una diminuzione della velocità orizzontale del vento in prossimità del terreno stesso (vertical share).
Le onde, più frequenti nel PBL notturno, non sono molto efficaci nella propagazione di calore, inquinanti e altre grandezze scalari, ma lo sono nel trasporto di quantità di moto ed energia. Possono essere generate localmente dal “vertical shear” del vento (variazione con la quota della velocità del vento medio) o dalla presenza di ostacoli che perturbano il flusso, oppure possono propagarsi da sorgenti, come temporali ed esplosioni, lontane dalla zona di osservazione. I modelli di dispersione non tengono conto delle onde, in quanto l’entità dei loro effetti è generalmente trascurabile rispetto a quelli delle altre componenti. Onde e turbolenza sono generalmente sovrapposte al vento medio, ma nella realtà, la propagazione di calore, quantità di moto e inquinanti, generalmente, si considera dominata orizzontalmente dal vento medio e verticalmente dalla turbolenza [66].
La turbolenza è definita come una condizione di flusso irregolare, in cui varie grandezze mostrano fluttuazioni casuali sia nel tempo che nello spazio; si hanno vortici (eddies) di varie
dimensioni che si sovrappongono al flusso medio. La diffusione turbolenta può essere di tipo diverso a seconda della sua origine [65]:
• Turbolenza convettiva (o termodinamica), con origine termica: è provocata dal riscaldamento per radiazione del terreno, il quale, a sua volta, riscalda gli strati d’aria sovrastanti, creando così una circolazione verticale con risalita di aria calda e moti discendenti di aria fredda. Questo tipo di turbolenza rappresenta il meccanismo più efficace per la dispersione verticale degli inquinanti;
• Turbolenza di origine meccanica: è generata dal “vertical share” del vento, la cui intensità diminuisce con la quota per l’attrito con il terreno, provocando instabilità nel flusso d’aria. Questo tipo di turbolenza è isotropa ed ha generalmente intensità trascurabile rispetto a quella della turbolenza convettiva;
• Turbolenza dovuta alla presenza di ostacoli (alberi, edifici isolati, ecc.) lungo la direzione del flusso, che possono generare fenomeni turbolenti locali, come la formazione di vortici sottovento all’ostacolo, difficilmente rappresentabili. Tuttavia, i più recenti ed evoluti modelli diffusionali comprendano algoritmi per la trattazione di tali fenomeni (l’effetto viene indicato con il termine “down-wash”).
4.2.2 EVOLUZIONE GIORNALIERA DEL PBL
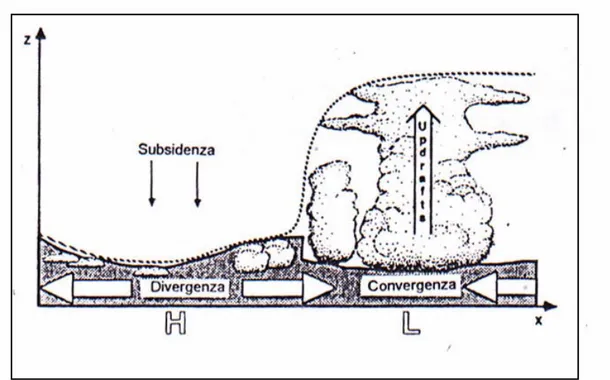
L’altezza complessiva della Troposfera è di circa 11 Km dal suolo; il PBL occupa la porzione più bassa, con altezza variabile tra 100-200 m (notti serene, vento debole) e 2-3 Km (irraggiamento solare intenso, forte vento); il resto è atmosfera libera. È difficile stabilire con esattezza l’altezza del PBL perché è molto variabile: oltre a presentare un ciclo diurno, essa risulta fortemente dipendente dalle condizioni meteorologiche e orografiche del sito [66]. Il PBL risulta più sottile nelle regioni di alta pressione che in quelle di bassa pressione (Figura 4.4). Infatti, alle alte pressioni sinottiche sono associati fenomeni di subsidenza e divergenza orizzontale (nei bassi strati), che muovono l’aria verso le aree a bassa pressione. Il PBL presenta quindi, nelle zone stabili e prive di nubi, una scarsa estensione verticale. Al contrario, nelle zone di bassa pressione, i moti ascensionali e la convergenza sospingono l’aria fino a quote elevate, causando spesso la formazione di nubi cumuliformi. In questo caso, è difficile stabilire fisicamente l’altezza del PBL, pertanto si ricorre ad una definizione convenzionale che la pone uguale alla quota della base delle nuvole [66].
Al di sopra del mare aperto l’altezza del PBL varia abbastanza lentamente nel tempo e nello spazio: la superficie del mare è uniforme e la sua temperatura non subisce variazioni significative durante il ciclo diurno, a causa del continuo rimescolamento e della elevata capacità termica dell’acqua.
Figura 4.4: Illustrazione schematica delle variazioni a scala sinottica dell’altezza del PBL (la linea tratteggiata rappresenta il valore massimo)
Sulla terra ferma invece lo strato limite terrestre è molto più variabile: può presentarsi in tre forme principali che si alternano nel corso delle 24 ore [62]:
Il Mixed Layer, ML (o Convective Boundary Layer, CBL) è lo strato di mescolamento, con turbolenza dovuta alla convezione termica, caratteristico di condizioni di instabilità atmosferica (Figura 4.5).
Figura 4.5: Dispersione degli inquinanti (looping) e moti convettivi del ML.
INQUINANTI
NUBI
ARIA CALDA
Limite dello strato di mescolamento
La formazione del ML inizia dopo l’alba, quando il suolo comincia a scaldarsi, e man mano che il calore assorbito aumenta e la circolazione turbolenta verticale si intensifica, la sua altezza
cresce, fino a raggiungere il massimo nel pomeriggio. I moti turbolenti favoriscono la diluizione degli inquinanti, che avviene in grandi volumi di aria, e ne facilitano la dispersione (“looping” del pennacchio), riducendo le concentrazioni al suolo. Al di sopra del ML può rimanere uno strato d’inversione termica (fortemente stabile) che, a seconda della quota di emissione degli effluenti, può fungere da tappo, impedendo agli inquinanti di disperdersi verso l’alta atmosfera, o da protezione, ostacolandone la ricaduta al suolo.
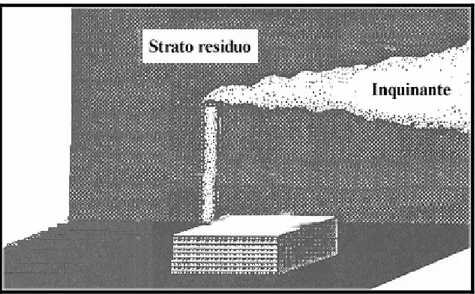
Il Residual Layer, RL, è lo strato residuo, che si forma circa 30 minuti prima del tramonto e determina il passaggio graduale dalle condizioni instabili, caratteristiche delle ore del giorno, a condizioni approssimativamente neutre. Man mano che l’irraggiamento solare si riduce, il suolo cede sempre meno calore all’aria sovrastante, e i primi a raffreddarsi sono gli strati più lontani da esso. La formazione del RL comincia quindi dagli strati più alti del ML. Nel RL la turbolenza, solo di tipo meccanico e isotropa, ha la stessa intensità in tutte le direzioni e questo spiega la forma a cono (“coning”) dei pennacchi di fumo emessi nel RL (Figura 4.6).
Figura 4.6: Dispersione degli inquinanti nel RL (coning)
Lo Stable Boundary Layer, SBL, caratterizzato da quasi totale assenza di turbolenza, si forma durante la notte dalla progressiva erosione, a partire dal suolo, dello strato residuo (RL), che lascia il posto a condizioni stabili. In assenza di vento, la stabilità atmosferica favorisce il ristagno degli inquinanti nelle immediate vicinanze della sorgente. In presenza di vento invece, gli inquinanti si disperdono lungo la sua direzione prevalente (Figura 4.7), e possono percorrere distanze anche molto lunghe prima di ricadere al suolo; il pennacchio può assumere forma a ventaglio, a fascia o a bandiera, a seconda della variabilità della direzione e dell’intensità dei venti (“fanning”).
Figura 4.7: Dispersione degli inquinanti nello SBL
A quelli descritti, si aggiugono uno strato di piccolo spessore vicino al terreno detto strato superficiale (Surface Layer) e, nel caso siano presenti formazioni nuvolose durante il giorno, uno strato nuvoloso (Cloud Layer) posto nella parte alta di quello di miscelamento.
In Figura 4.8 è schematizzato il passaggio da uno strato all’altro durante 24 ore.
Figura 4.8: Evoluzione giornaliera del PBL
4.2.3 DISPERSIONE DEI PENNACCHI NEL PBL
In Figura 4.9 vengono riassunte le relazioni tra condizioni atmosferiche e forma dei pennacchi, evidenziando anche l’andamento della concentrazione con la distanza dalla sorgente. I casi che si possono verificare sono i seguenti [61]:
A) Atmosfera instabile: ampie diluizioni e rapidi mescolamenti per effetto della turbolenza convettiva (“looping”);
B) Atmosfera neutra: pennacchio generalmente simmetrico (“coning”) per effetto della turbolenza meccanica isotropa;
C) Atmosfera stabile: impedisce notevolmente la dispersione verticale del pennacchio che quindi si espande in direzione del vento (“fanning”);
D) Camino che emette al di sopra dello strato di inversione: dispersione dei fumi verso l’alto e riduzione della concentrazione al suolo degli inquinanti;
E) Camino che emette al di sotto dello strato di inversione: i fumi si disperdono verso il basso causando alte concentrazioni di inquinanti al suolo (“fumigation”).
4.3 MODELLI DI DISPERSIONE ATMOSFERICA
I modelli matematici diffusionali, accreditati su base internazionale, sono frequentemente utilizzati nell’ambito degli studi di valutazione dell’inquinamento atmosferica, come raccomandato dal D.lgs n.351/99 (“Attuazione della Direttiva 96/62/CE in materia di valutazione e di gestione della qualità dell'aria ambiente”) e dal D.M. n. 60 del 2 Aprile 2002. L’innovazione fondamentale introdotta dalla direttiva europea è costituita da un salto di qualità metodologico nell’affrontare il problema dell’inquinamento atmosferico, che consiste nell’integrazione di informazioni di diverso tipo:
o reti di monitoraggio della qualità dell’aria; o modelli matematici diffusionali;
o inventari delle emissioni.
4.3.1 APPLICAZIONI DEI MODELLI DIFFUSIONALI
I modelli di dispersione atmosferica si basano sullo sviluppo di algoritmi ed equazioni matematiche che mettono in relazione la concentrazione degli inquinanti, emessi da una o più sorgenti, con i molteplici fattori che ne governano trasporto, dispersione e trasformazione in atmosfera. La simulazione della ricaduta al suolo degli inquinanti consente di prevedere gli effetti dell’impianto emissivo sulla popolazione esposta, in modo spesso conveniente, in termini di costo e tempo, rispetto all’analisi sul campo. I modelli rappresentano potenti strumenti per:
• estendere il dato di concentrazione puntuale per ottenere campi di concentrazione anche in aree del territorio non raggiunte dalle reti di monitoraggio, tenendo conto della distribuzione spazio-temporale delle emissioni e delle condizioni meteorologiche locali; • ottenere informazioni sulle relazioni tra emissioni ed immissioni, e cioè tra sorgente e
recettori, con la possibilità di calcolare i contributi relativi delle singole sorgenti; • valutare l’impatto di inquinanti non monitorati dalle reti esistenti;
• studiare scenari ipotetici di emissione, in modo da valutare i potenziali effetti dovuti all’insediamento di nuovi siti produttivi o ad interventi su impianti esistenti.
4.3.2 CATEGORIE DI MODELLI
Nel seguito sono descritte, a grandi linee, le principali categorie di modelli disponibili per lo studio della dispersione atmosferica degli inquinanti, e i criteri generali che guidano la loro scelta per casi reali di applicazione [67].
Modelli analitici "a pennacchio":
Sono codici molto semplici che richiedono pochi ma essenziali dati meteorologici in ingresso e limitate risorse di calcolo. Questi modelli sono adatti a simulare situazioni stazionarie nello
spazio e nel tempo, in cui la dispersione turbolenta viene parametrizzata con coefficienti empirici ricavati sperimentalmente (curve di Pasquill-Gifford o di Briggs).
Modelli tridimensionali "a puff”:
Sono codici più complessi di quelli a pennacchio, caratterizzati da formulazione gaussiana per la dispersione, ma con la possibilità di tenere conto della variabilità delle emissioni (rappresentate come rilascio di serie continue di pacchetti discreti di materiale) e della distribuzione spazio – temporale di variabili meteorologiche e parametri dispersivi.
Modelli tridimensionali Lagrangiani a “particelle”:
Codici in cui la simulazione della dispersione degli inquinanti viene trattata attraverso pseudo-particelle, la cui dinamica all'interno del dominio di calcolo viene determinata dal campo di vento e dalle condizioni di turbolenza locali dell'atmosfera.
Modelli tridimensionali euleriani "a griglia":
Sono codici che si basano sull'integrazione numerica dell'equazione differenziale di conservazione della massa, per ogni inquinante considerato.
In generale, per scegliere il codice più adatto ad uno specifico studio, la prima operazione da compiere è quella di definire in modo corretto e completo gli obiettivi e lo scenario di applicazione, cioè l’insieme di tutti gli elementi caratteristici del problema che consentono di individuare la categoria di modelli appropriata. Tali caratteristiche fondamentali sono:
• scala spaziale e temporale del fenomeno di inquinamento in esame; • complessità delle condizioni meteoclimatiche ed orografiche locali; • tipologia della/e sorgente/i di emissione;
• tipologia delle sostanze inquinanti.
Una volta individuata la categoria, si procede con la scelta dello specifico modello più opportuno, in base a vari fattori come:
• tipo e requisiti dei dati di output desiderati;
• fenomeni atmosferici che si intendono trattare (trasporto, dispersione, deposizione, reazione);
• caratteristiche dell’area di riferimento (urbana o rurale) • risorse disponibili (umane, economiche, di hardware); • tipo e quantità di dati di input disponibili.
Per quanto riguarda la scala spaziale, si dovranno prima di tutto considerare i modelli più adatti a riprodurre efficacemente i fenomeni che determinano i valori di inquinamento più alti su scala locale (confrontati con gli standard di qualità dell’aria). Tali fenomeni possono avere origine o caratteristiche determinati da fattori relativi a scale più ampie, per cui può risultare opportuno l’uso di un modello a mesoscala ad elevata risoluzione, o l’uso di più modelli in cascata con estensione decrescente (e risoluzione crescente).
Relativamente alla scala temporale bisogna distinguere tra modelli di “breve periodo” (short – term) e di “lungo periodo” (long – term). I primi sono adatti a simulare episodi isolati di inquinamento atmosferico intenso (sono spesso impiegati per individuare le “peggiori condizioni possibili”), mentre gli altri sono in grado di stimare gli indicatori della qualità dell’aria da confrontare con gli standard, che hanno un periodo di riferimento di un anno.
La complessità dell’area d’indagine deve essere valutata tenendo conto di caratteristiche orografiche del territorio, disomogeneità superficiali (discontinuità mare-terra, città-campagna), e condizioni meteo-diffusive variabili e complesse (calme di vento, inversioni termiche).
Fondamentale per la scelta della categoria di modelli da usare è anche la tipologia delle sorgenti di emissione. In particolare, per sorgenti puntuali, lineari ed areali, presenti in numero limitato e riconducibili a geometrie standard, possono essere impiegati modelli analitici e Lagrangiani a particelle. Nel caso invece di sorgenti puntiformi e diffuse sul territorio, occorre partire da un inventario delle emissioni su un grigliato regolare di opportune dimensioni, che viene normalmente accoppiato ad un modello dispersivo Euleriano.
Se le sostanze inquinanti trattate sono reattive in atmosfera, con eventuale produzione di inquinanti secondari, si deve utilizzare un codice che includa un modulo di trasformazione chimica.
La scelta tra modelli analitici e tridimensionali dipende principalmente dalla complessità dello scenario. L'uso di un modello analitico è consigliabile solo in caso di orografie molto semplici ed in quasi totale assenza di calme di vento, in quanto non sono adatti a considerare la variabilità spazio-temporale dei parametri atmosferici.
L'utilizzo dei modelli tridimensionali (Lagrangiani o Euleriani) è invece praticamente indispensabile nel caso di simulazioni su larga scala (mesoscala), in quanto occorre tenere conto della circolazione atmosferica a scala sinottica e delle sue variazioni spaziali e temporali.
I modelli a ‘puff" possono infine essere considerati una categoria intermedia tra quelli analitici tradizionali ed quelli tridimensionali completi. Essi sono definiti “intermedi” perché, se da un lato sono in grado di ricostruire un campo di vento tridimensionale, per loro natura sono però in grado di fornire delle valide simulazioni solo finché una singola traiettoria rappresenta il trasporto degli inquinanti [67].
Nelle sezioni seguenti verranno descritti più in dettaglio i modelli a pennacchio gaussiano e i modelli tridimensionali a puff, riportando per ciascuno l’esempio di un codice di ultima generazione e dei rispettivi limiti e potenzialità.
4.4 MODELLI ANALITICI A PENNACCHIO
Il principio fondamentale della dispersione gaussiana è che la variazione della concentrazione in aria di inquinante nel tempo, sottovento dalla sorgente, può essere modellata con una curva di distribuzione normale.
4.4.1 PRINCIPI GENERALI ED ASSUNZIONI
I modelli analitici a pennacchio gaussiano si basano inoltre sulle seguenti assunzioni e semplificazioni:
o terreno infinita e piana (assunto come una superficie ideale);
o flusso orizzontalmente omogeneo e stazionario, cioè le sue proprietà statistiche sono indipendenti dalla posizione orizzontale e dal tempo, e variano solo con la quota;
o tasso di emissione della sorgente costante;
o velocità del vento costante sia nel tempo che con la quota;
o sostanze inquinanti conservative: non si riducono per decadimento, reazione– trasformazione chimica o deposizione;
o suolo completamente riflettente (coefficiente di adsorbimento α = 0).
Il modello base si applica ad una singola sorgente puntuale, come un camino (ma può essere modificato per adattarlo a sorgenti lineari o aerali) e si basa sulle seguenti considerazioni generali:
• se l’emissione di una sorgente inquinante ha una temperatura più elevata di quella dell’aria circostante o possiede una spinta di tipo meccanico, essa tenderà a salire fino alla quota di equilibrio;
• alla quota di equilibrio, l’effluente tenderà ad essere trasportato per effetto del vento, anche a grandi distanze;
• durante il trasporto, la turbolenza (sia verticale che orizzontale) tenderà a rimescolare e quindi diluire e disperdere gli inquinanti.
4.4.2 EQUAZIONI PER IL CALCOLO DELLA CONCENTRAZIONE
Per semplicità si considera una fonte puntuale come mostrato in Figura 4.10, dove il camino è posto nell’origine, e dove la distanza orizzontale sottovento è espressa attraverso la variabile x, la distanza orizzontale laterale dal centro corrispondente a y, e la quota è data da z [61].
Figura 4.10: Pennacchio istantaneo e pennacchio mediato sul tempo con distribuzione gaussiana.
Il modello gaussiano assume che la concentrazione di inquinante segua una distribuzione normale sia nel piano verticale che in quello orizzontale. Nella linea centrale del pennacchio, al di sopra dell’altezza del camino, si ha la concentrazione più elevata, mentre i valori risultano tanto più bassi quanto più ci si allontana da essa.
Poiché il pennacchio assume diverse forme irregolari in ogni singolo momento, si ricorre al calcolo della media temporale per la concentrazione degli inquinanti.
In considerazione del fatto che il parametro di maggiore interesse è la concentrazione degli inquinanti che raggiunge il suolo, riportiamo l’equazione gaussiana per z=0 [F43]:
)
e
)(
e
(
u
Q
)
y
,
x
(
C
z y y H z y 2 2 2 2 2 2σ σσ
σ
π
− −=
(4.2) dove:- C(x,y) = concentrazione dell’inquinante al suolo nel punto (x,y) [µg/m3];
- x = distanza dalla sorgente sottovento [m];
- y = distanza orizzontale dalla linea centrale del pennacchio [m]; - Q = tasso di emissione dell’inquinante [g/s];
- H = altezza effettiva del camino [m] (H =h+∆h, dove h = altezza geometrica del camino, e ∆h = risalita del pennacchio, per spinta termica e/o meccanica);
- u = velocità media del vento lungo la direzione x [m/sec]; - σy = coefficiente di dispersione orizzontale [m];
- σz = coefficiente di dispersione verticale [m];
4.4.2.1 Coefficienti di dispersione gaussiana
I coefficienti di dispersione atmosferica σy e σz rappresentano rispettivamente la deviazione
standard delle distribuzioni gaussiane orizzontale e verticale, e sono funzione della distanza dalla sorgente e dalla stabilità atmosferica. A valori piccoli di deviazione standard corrisponde una curva stretta con concentrazione di picco alta, mentre a valori elevati si associano curve di distribuzione più appiattite con concentrazioni di picco più basse. σy e σz aumentano
allontanandosi dalla sorgente in direzione sottovento, causando il progressivo appiattimento delle curve. La procedura più comune per la determinazione sperimentale dei coefficienti σy e σz è
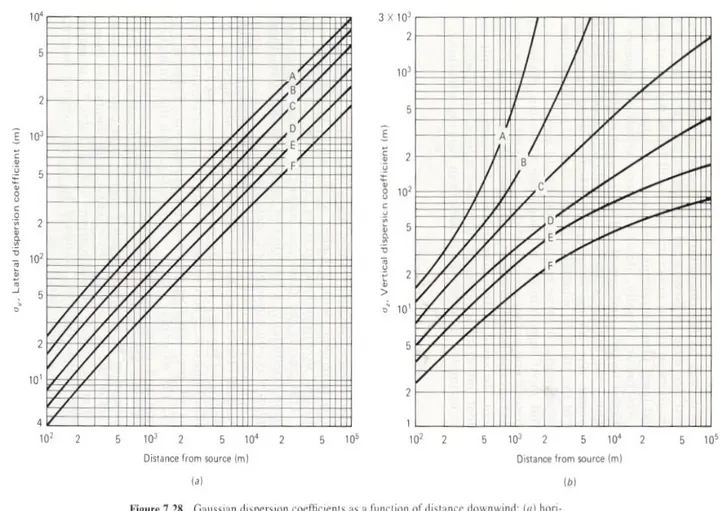
l’uso di grafici come quelli riportati in Figura 4.11, derivati da Pasquill e Gifford (1961).
Figura 4.11: Coefficienti di dispersione gaussiana in funzione della distanza dalla sorgente: (a)coefficiente orizzontale σy , (b)coefficiente verticale σz.
Sull’asse delle ascisse è posta la distanza dalla sorgente, sull’asse delle ordinate è posto rispettivamente il coefficiente di dispersione orizzontale (a) ed il coefficiente di dispersione verticale (b); i parametri A-F rappresentano le classi di stabilità atmosferica.
Alternativamente, si possono utilizzare le seguenti formule:
894 0, y
=
ax
σ
f
cx
d z=
+
σ
dove la distanza x deve essere espressa in chilometri nell’espressione di σy ed in metri per σz,
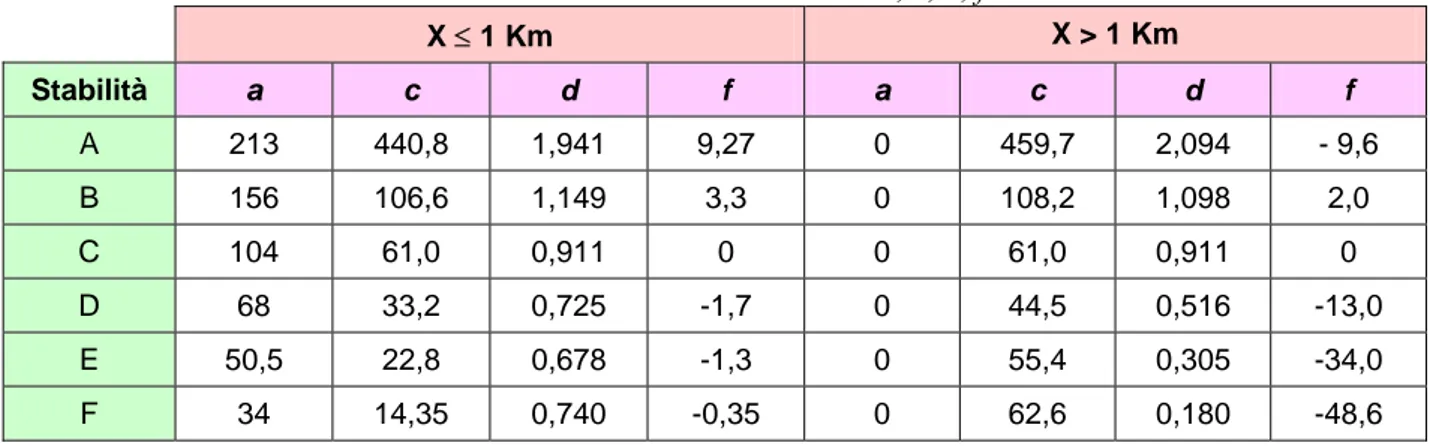
mentre le costanti a, c, d, f vengono determinate attraverso la Tabella 4.4 in base alla classe di stabilità e alla distanza dalla sorgente [64].
Tabella 4.4: Valori delle costanti a, c, d, f.
X ≤ 1 Km X > 1 Km Stabilità a c d f a c d f A 213 440,8 1,941 9,27 0 459,7 2,094 - 9,6 B 156 106,6 1,149 3,3 0 108,2 1,098 2,0 C 104 61,0 0,911 0 0 61,0 0,911 0 D 68 33,2 0,725 -1,7 0 44,5 0,516 -13,0 E 50,5 22,8 0,678 -1,3 0 55,4 0,305 -34,0 F 34 14,35 0,740 -0,35 0 62,6 0,180 -48,6
4.4.2.2 Concentrazione di inquinante al suolo
La concentrazione al suolo in direzione sottovento è sicuramente quella di maggior interesse per i problemi di inquinamento. Ponendo y = 0, ovvero spostandosi lungo l’asse x senza muoversi lateralmente, l’equazione gaussiana del pennacchio diventa:
)
e
(
u
Q
)
,
x
(
C
z H z y 2 2 20
σσ
σ
π
−=
(4.3)Riportando su un grafico la distanza contro la concentrazione, si possono fare simulazioni variando parametri come l’altezza del camino o la stabilità atmosferica (Figura 4.12) [61].
Come si vede in Figura 4.12a, all’aumentare dell’altezza del camino diminuisce la concentrazione massima a terra; mentre per quanto riguarda le classi di stabilità, nella Figura 4.12b, si nota che non è l’atmosfera stabile a produrre il picco di concentrazione più alto ma quella instabile, per uno stesso valore di altezza. Infatti la turbolenza nell’atmosfera instabile
porta l’inquinante velocemente a terra provocando un picco di concentrazione vicino al camino; allontanandosi però da esso in direzione sottovento la concentrazione raggiunge rapidamente valori prossimi allo zero. L’atmosfera stabile, d’altro canto, produce un picco di concentrazione più basso, però tale concentrazione, all’aumentare della distanza, resta più alta rispetto alla condizione instabile e continua ad essere significativa anche per distanze notevoli.
La stabilità atmosferica ha effetto anche sull’innalzamento del pennacchio: condizioni instabili provocano innalzamenti più marcati, producendo quindi più basse concentrazioni a terra di quelle mostrate.
Figura 4.12: Esempio di andamento della concentrazione con la distanza al variare di parametri come (a)altezza del camino, (b)condizioni di stabilità atmosferica.
4.4.3 ESEMPIO DI MODELLO GAUSSIANO: IL CODICE AERMOD (U.S.EPA)
Nel 1991, il comitato AERMIC (AMS/EPA Regulatory Model Improvement Committee), costituito da membri dell’AMS (American Meteorological Society) e dell’EPA (Environmental Protection Agency), si è formato nell’intento di elaborare un nuovo modello di dispersione degli inquinanti nel PBL, che soddisfacesse le seguenti linee guida generali [68]:
• fornire valori di concentrazione calcolati per un’ampia varietà di condizioni; • essere di facile utilizzo con un numero non troppo elevato di dati in input;
• cercare di interpretare tutti i fenomeni fisici atmosferici significativi, conservando una struttura abbastanza comprensibile;
• essere già predisposto ad eventuali futuri aggiornamenti.
Il punto di partenza di AERMIC è stato l’idea di trovare un modello sostitutivo al ISC3 (Industrial Source Complex), mantenendo la stessa struttura per quanto riguarda input ed output, ma aggiornandolo con nuovi algoritmi che rispecchiassero l’attuale stato dell’arte della modellistica ambientale. Rispetto a ISC3 si è inoltre cercato di migliorare l’approccio ai processi di dispersione nel ML (Mixed Layer) e nel SBL (Stable Boundary Layer).
Dopo varie revisioni e prove di validazione, AERMOD (AMS/EPA Regulatory Model) è stato sottoposto ad un attento studio da parte dell’OAQPS (Office of Air Quality Planning and Standards) dell’EPA per essere inserito nella “Guideline on Air Quality Model”, e quindi entrare a far parte della modellistica riconosciuta ufficialmente per scopi normativi.
4.4.3.1 Linee generali di AERMOD
AERMOD è uno “steady-state plume model”, ovvero un modello analitico stazionario a pennacchio che simula la dispersione degli inquinanti in atmosfera basandosi sull’equazione gaussiana, e ne calcola la concentrazione nel dominio d’indagine, in corrispondenza di recettori distribuiti su una griglia (definita dall’utente) o discreti. Il codice prevede la possibilità di considerare diverse tipologie di fonti emissive (puntuali, areali, volumiche) e a ciascun tipo di sorgente corrisponde un diverso algoritmo per il calcolo della concentrazione. Il modello calcola il contributo di ciascuna sorgente su ciascun recettore e ne somma gli effetti. Poiché il modello è stazionario, le emissioni sono assunte costanti nell’intervallo temporale di simulazione (generalmente un’ora).
Le principali caratteristiche innovative di AERMOD rispetto al predecessore ISC3 sono:
• trattazione differente della dispersione degli inquinanti nello SBL (Stable Boundary Layer) e nel CBL (Convective Boundary Layer): nel primo caso, in condizioni stabili, la distribuzione di concentrazione segue una curva gaussiana sia in orizzontale che in
verticale, mentre nel secondo caso, in condizioni di instabilità, la distribuzione di concentrazione segue una curva gaussiana in direzione orizzontale, e in verticale segue una funzione di densità di probabilità di tipo bi-gaussiano;
• possibilità di trattare il fenomeno detto “plume lofting” nel CBL, per il quale una porzione di massa del pennacchio emessa dalla sorgente, sale e rimane nella parte superiore dello strato stabile prima di essere mescolata dalla turbolenza del CBL;
• possibilità di ricostruire i profili verticali delle variabili meteorologiche più significative (vento, temperatura, turbolenza, ecc.) utilizzando i dati rilevati al suolo e in quota;
• possibilità di considerare fenomeni di deposizione e reazione /trasformazione chimica degli inquinanti;
• possibilità di trattare considerare condizioni orografiche sia semplici che complesse. Il codice consente di effettuare due tipi di simulazioni:
o “short term”: fornisce concentrazioni medie orarie o giornaliere, consentendo di individuare la peggior condizione possibile;
o “long-term”: tratta gli effetti dei rilasci prolungati nel tempo, al variare delle caratteristiche atmosferiche e meteorologiche, e fornisce le condizioni medie nell’intervallo di tempo considerato, generalmente un anno.
Il modello si avvale dell’utilizzo di due programmi per elaborare i dati di input: il preprocessore meteorologico AERMET;
il preprocessore orografico AERMAP
4.4.3.2 Il programma AERMET
Lo scopo di questo preprocessore è quello di raccogliere ed elaborare i dati meteorologici rappresentativi della zona studiata, per calcolare i parametri dispersivi del PBL e consentire così ad AERMOD di ricavarsi i profili verticali delle variabili più influenti su trasporto e dispersione degli inquinanti.
L’input di AERMET consiste di quattro tipi di dati [69]:
1. DATI ORARI DI SUPERFICIE: parametri rilevati dalle stazioni meteorologiche (generalmente a 10 m dal suolo). Comprendono:
- dati relativi alla stazione: numero identificativo, coordinate (UTM, North America 1927 datum), quota;
- dati meteorologici: temperatura, velocità e direzione del vento, copertura nuvolosa.
Per essere letti ed elaborati da AERMET, i dati di input devono essere scritti in uno dei seguenti formati: CD144, SCRAM, SAMSON. Alcune variabili, se il loro valore non è noto, possono essere omesse introducendo opportuni “missing indicator”.
2. DATI ON-SITE (opzionali). Comprendono:
radiazione solare, pressione atmosferica, umidità relativa, turbolenza, visibilità, precipitazioni.
3. DATI “UPPER AIR”: dati meteorologici in quota, ad una serie di livelli di pressione compresi tra il suolo e l’altezza massima dello strato di mescolamento; possono essere direttamente rilevati da stazioni meteorologiche (attrezzate con sonde, radar, ecc) che effettuano sondaggi in quota almeno due volte al giorno, o da sistemi di misurazione satellitari; altrimenti, possono essere utilizzati modelli meteorologici (per esempio RAMS) che elaborano i dati al suolo misurati dalle centraline per ottenere i valori corrispondenti alle diverse quote d’interesse.
I dati “upper air” richiesti da AERMOD, oltre a quelli relativi alla stazione sono, per ogni livello di misurazione: pressione atmosferica, altezza geopotenziale, velocità e direzione del vento, temperatura, umidità relativa, (formato TD6200).
4. PARAMETRI DI LAND-USE : i parametri di uso del suolo comprendono: Albedo, Bowen ratio, rugosità superficiale.
Se non sono disponibili, il programma suggerisce dei valori che ricavati mediante abachi sperimentali (U.S.EPA) che determinano i valori dei parametri in funzione del periodo (stagione o mese) considerato e dell’uso del suolo.
AERMET elabora i dati meteorologici descritti per produrre i seguenti parametri, che verranno poi forniti come input ad AERMOD:
- H: flusso di calore sensibile;
- L: lunghezza di Monin-Obukhov per tutte le ore disponibili; - u*: velocità di attrito;
- zim: altezza di rimescolamento meccanico per tutte le ore disponibili;
- zic: altezza di rimescolamento convettivo (solo per le ore in cui si ha turbolenza di origine
convettiva);
- w*: velocità di scala turbolenta (solo per le ore in cui si ha turbolenza di origine convettiva);
- r(Φ): Albedo; - B0: Bowen ratio;
- uref: velocità del vento alla quota di riferimento zref;
- dθ/dz: gradiente di temperatura potenziale.
Inoltre, AERMOD riceve in ingresso alcuni dati di input dello stesso AERMET: - velocità e direzione del vento;
- temperatura;
- turbolenza verticale e laterale.
Di seguito viene brevemente spiegato il significato di alcune delle variabili più significative. La velocità di attrito (u*) è uno dei parametri che meglio rappresenta la turbolenza di origine
meccanica. Essa ha le dimensioni di una velocità ed è descritta dalla relazione:
( )
*0
u
τ
ρ
=
dove τ(0) indica il valore degli stress di Reynolds in superficie e ρ la densità. La u* permette di
quantificare lo sforzo di taglio del vento dovuto all’attrito con la superficie terrestre; il suo valore è proporzionale a velocità del vento e rugosità del suolo.
L’altezza di miscelamento meccanico o convettivo (zim, zic) ha un ruolo determinante per la
definizione del volume di diluizione, all’interno del quale si ha la completa miscelazione dell’aria e degli agenti inquinanti. E’ un valore che può essere misurato (misure in quota o satellitari) oppure si può ricavare da relazioni sperimentali che legano questa variabile con parametri meteorologici più facilmente rilevabili.
La lunghezza di Monin-Obukhov (L) è un indicatore del tipo di turbolenza: si esprime infatti tramite un rapporto tra la misura della turbolenza di origine meccanica e quella di origine termica.
L’output di AERMET viene elaborato da AERMOD per ottenere due record di parametri caratterizzanti il PBL: uno per i valori delle variabili meteorologiche al suolo ed i parametri di superficie (SURFACE.DAT), e l’altro per i profili verticali delle variabili più significative per il trasporto e la dispersione degli inquinanti (PROFILE.DAT) che sono:
• velocità del vento; • direzione del vento; • temperatura;
• gradiente di temperatura potenziale; • turbolenza verticale;
A questo punto, attraverso un’operazione simile alla media statistica, AERMOD effettua una conversione delle variabili disomogenee, rendendole uniformi: partendo dai profili verticali si ottengono singoli valori delle variabili meteorologiche, che vengono assunti come rappresentativi del loro andamento in tutto lo strato esaminato. È proprio questa la principale limitazione del modello: le condizioni meteorologiche sono assunte costanti ed omogenee in tutto il dominio, non consentendo di valutare gli effetti delle loro variazioni sulla dispersione degli inquinanti. Inoltre, AERMOD non comprende nessun algoritmo specifico per trattare le situazioni di calma di vento o di vento molto debole [69].
4.4.3.3 Il programma AERMAP
Lo scopo di questo preprocessore è quello di raccogliere ed elaborare le caratteristiche e l’altimetria del territorio, consentendo l’applicazione di AERMOD a zone sia pianeggianti che a morfologia complessa. Mediante AERMAP si suddivide il territorio in una griglia di recettori e per ogni punto si introduce una morfologia iniziale, che verrà poi trasformata dal programma in una “morfologia efficace” (da fornire come input ad AERMOD), in dipendenza dall’altitudine e dalla distanza dal recettore. La capacità di AERMAP di rielaborare i dati sul territorio dal punto di vista del singolo recettore rendono necessario l’utilizzo di un formato digitalizzato per le mappe. Infatti, il modello si avvale del concetto del “dividing streamline”, cioè di un’altezza caratteristica Hc che divide il flusso di inquinante in due parti. Nota questa
altezza, il territorio verrà caratterizzato in modo diverso per ciascun punto della griglia. Il formato digitale è utile perché, per ogni punto dell’area in esame, mette a disposizione un vettore che verrà riempito di volta in volta con le altezze relative ai recettori [69].
Le mappe che devono essere codificate da AERMAP hanno un formato particolare: USGS-DEM file (United States Geological Survey - Digital Elevation Map), e in particolare, per applicazioni a scale locali, il formato più adatto è il 7,5-minute DEM: l’area che viene digitalizzata è formata da un quadrato di lato 7,5 minuti e la griglia considerata è formata da punti distanziati tra loro da 30 metri l’uno dall’altro. L’USGS 7,5 minute-DEM è un formato non molto diffuso in Europa, e questo rende piuttosto difficoltosa l’acquisizione dei dati relativi all’altimetria del territorio. Tuttavia, è possibile “creare” un DEM file a partire da formati più comuni di mappe digitali (come formati AUTOCAD, dwg e dxf) [62].
4.5 MODELLI TRIDIMENSIONALI NON STAZIONARI: CALPUFF
A differenza dei classici modelli a pennacchio gaussiano (ISC3, AERMOD), i modelli tridimensionali non stazionari a “puff” consentono di considerare gli effetti di condizioni meteorologiche ed orografiche complesse sulla dispersione degli inquinanti.
4.5.1 BREVE STORIA DI CALPUFF
Nell’ambito della ricerca per lo sviluppo di nuovi modelli di dispersione atmosferica del tipo non stazionario, la “Sigma Research Corporation” (Earth Tech, Inc.), nel 1990, ha prodotto il “CALPUFF Model System”.
Le linee generali che hanno guidato lo sviluppo del modello sono riassunte di seguito: • applicabilità a sorgenti (di vario tipo) con emissioni variabili nel tempo; • applicabilità a domini d’indagine sia a grande che a piccola scala;
• applicabilità a condizioni meteorologiche non stazionarie ed orografiche complesse; • possibilità di trattare fenomeni atmosferici di deposizione umida e secca, decadimento,
reazione chimica e trasformazione degli inquinanti.
Il sistema sviluppato per rispondere ai requisiti descritti è composto da tre componenti principali: 1. un processore meteorologico (CALMET) in grado di ricostruire campi con
cadenza oraria, tridimensionali di vento e temperatura, bidimensionali di altre variabili come turbolenza, altezza di mescolamento, ecc;
2. un modello di dispersione non stazionario (CALPUFF), che simula il rilascio di inquinanti dalla sorgente come una serie di pacchetti discreti di materiale (“puff”), emessi ad intervalli di tempo prestabiliti; CALPUFF può avvalersi dei campi tridimensionali generati da CALMET, oppure utilizzare altri formati di dati meteorologici;
3. un programma di postprocessamento degli output di CALPUFF (CALPOST), che consente di ottenere i formati richiesti dall’utente ed è in grado di interfacciarsi col software SURFER per l’elaborazione grafica dei risultati.
Due ulteriori componenti sono state successivamente integrate col sistema:
4. un modello Euleriano fotochimico (CALGRID) per poter trattare anche inquinanti reagenti;
5. un modello Lagrangiano a particelle, multistrato e multispecie (Kynematic Simulation Particle, KPS).
La versione attuale del modello include i tre componenti principali (CALMET/ CALPUFF/ CALPOST), ed un set di vari programmi che consentono al sistema di interfacciarsi a dataset standard di dati meteorologici e geofisici (purtroppo non sempre facilmente reperibili in Italia). Dopo varie fasi di validazione e analisi di sensibilità, CALPUFF è stato inserito nella “Guideline on Air Quality Model” tra i modelli ufficiali di qualità dell’aria riconosciuti dall’U.S.EPA.
4.5.2 LINEE GENERALI DI CALPUFF
CALPUFF è un modello Lagrangiano Gaussiano a puff, non stazionario, multistrato e multispecie, le cui caratteristiche principali sono:
• capacità di trattare sorgenti puntuali, lineari, areali, di volume, con caratteristiche variabili nel tempo (flusso di massa dell’inquinante, velocità di uscita dei fumi, temperatura, ecc.);
• notevole flessibilità relativamente all’estensione del dominio di simulazione, da poche decine di metri (scala locale) a centinaia di chilometri dalla sorgente (mesoscala);
• capacità di trattare situazioni meteorologiche variabili e complesse, come calme di vento, parametri dispersivi non omogenei, effetti vicino alla sorgente, come transitional plume rise (innalzamento del plume dalla sorgente), building downwash (effetti locali di turbolenza dovuti alla presenza di ostacoli lungo la direzione del flusso), partial plume penetration (parziale penetrazione del plume nello strato d’inversione), fumigation; • capacità di trattare condizioni di orografia complessa e caratterizzate da una significativa
rugosità, nelle quali gli effetti della fisionomia del terreno influenzano la dispersione degli inquinanti;
• capacità di trattare effetti a lungo raggio quali le trasformazioni chimiche, trasporto sopra l’acqua ed interazione tra zone marine e zone costiere;
• possibilità di applicazione ad inquinanti inerti e polveri, soggetti a rimozione a secco o ad umido, ed a inquinanti reagenti: si possono considerare la formazione di inquinanti secondari, il fenomeno di smog fotochimico, ecc;
• possibilità di trattare emissioni odorigene.
Per poter tener conto della non stazionarietà dei fenomeni, l’emissione di inquinante (plume) viene suddivisa in “pacchetti” discreti di materiale (puff) la cui forma e dinamica dipendono dalle condizioni di rilascio e dalle condizioni meteorologiche locali.
Il contributo di ogni puff in un recettore viene valutato mediante un metodo “a foto”: ad intervalli di tempo regolari (sampling step), ogni puff viene “congelato” e viene calcolato il suo contributo
alla concentrazione. Il puff può quindi muoversi, evolversi in forma e dimensioni fino all’intervallo successivo (Figura 4.13) [70].
Figura 4.13: Discretizzazione del “plume” continuo in una serie di puff
La concentrazione complessiva in un recettore, è quindi calcolata come sommatoria del contributo di tutti gli elementi vicini, considerando la media di tutti gli intervalli temporali (sampling step) contenuti nel periodo di base (basic time step), in genere equivalente ad un’ora.
In CALPUFF sono presenti due opzioni per la rappresentazione dei “pacchetti” (Figura 4.14): 1. Puff: elementi gaussiani radiali-simmetrici
2. Slug: elementi non circolari allungati nella direzione del vento.
Per ogni sampling step, i pacchetti sono aggiornati in merito a:
¾ trasporto, considerando gli spostamenti del baricentro dell’elemento; ¾ coefficienti di dispersione associati all’elemento stesso.
Inoltre, nel codice è presente un’opzione (puff splitting) che permette di suddividere i puff in parti libere di disperdersi, indipendentemente dalla posizione assunta dal baricentro dell’elemento: infatti, quando i puff sono grandi e sono interessati da variazioni di velocità e direzione del vento a quote diverse, l’ipotesi che la massa dell’elemento si muova come il suo baricentro perde validità.
4.5.3 EQUAZIONI PER IL CALCOLO DELLA CONCENTRAZIONE
Le equazioni per il calcolo della concentrazione cambiano a seconda degli elementi utilizzati.
4.5.3.1 Puff equation
L’equazione di base per il calcolo del contributo del singolo puff al generico recettore è:
∑ ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − ⋅ ⋅ ⋅ ⋅ ⋅ = +∞ ∞ − 2z 2 e 2 y 2 c 2 x 2 a z y x 5 . 1 2 σ ) h n 2 H ( exp σ 2 d exp σ 2 d exp σ σ σ ) π 2 ( Q ) z , y , 0 ( C (4.4)
dove: C = concentrazione al suolo; Q = massa di inquinante del puff;
da = distanza tra il centro del puff e il recettore lungo la direzione del vento;
dc = distanza tra il centro del puff e il recettore in direzione ortogonale al vento;
σx = deviazione standard della distribuzione gaussiana lungo la direzione del vento; σy = deviazione standard della distribuzione gaussiana in senso perpendicolare alla
direzione del vento;
σz = deviazione standard della distribuzione gaussiana in senso verticale; He = altezza effettiva del centro del puff sopra il terreno;
h = altezza dello strato di miscelamento.
Un inconveniente tradizionale dell’approccio a puff è la necessità di rilascio di una grande quantità di elementi per riprodurre adeguatamente il plume continuo in prossimità della sorgente emissiva. E’ stato infatti dimostrato che se la distanza fra due successivi puff eccede di un massimo di 2σy, non si riesce ad ottenere una giusta sovrapposizione, e si possono ottenere dei
risultati non accurati. Il rispetto di questa condizione è piuttosto agevole lontano dalla sorgente, ossia quando i puff sono ormai diluiti, mentre diviene impegnativo nelle vicinanze della stessa. CALPUFF risolve il problema generando artificialmente dei puff ausiliari solo nei pressi nel recettore. In questo modo vengono sfruttate le proprietà specifiche del recettore (Calpuff integrated puff model), anzichè quelle locali (local puff model), usate tradizionalmente dal modello “a foto” per il calcolo dell’equazione (4.4).
4.5.3.2 Slug equation
La concentrazione dovuta alla presenza dello slug può essere espressa come:
∑ ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ = +∞ ∞ − 2z 2 e 2 2 y 2 2 c 2 x 2 a z y x 2 σ ) h n 2 H ( exp u σ 2 u d exp σ 2 d exp σ σ σ ) π 2 ( q F ) z , y , 0 ( C (4.5) con ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ = 1 y σ 2 1 a d erf 2 y σ 2 2 a d erf 2 1 F (4.6) dove:
u = vettore primario della velocità del vento;
u = scalare della velocità del vento ( 2 2) v u
u = +σ ;
q = tasso di emissione della sorgente;
F = Casuality Function (grandezza che tiene conto degli effetti di bordo dello slug);
da e dc = distanze del recettore nella direzione dell’asse dello slug e perpendicolarmente a questo
(i pedici 1 e 2 si riferiscono alle due estremità dello slug).
La formulazione a slug conserva molte importanti proprietà del modello a puff circolare. La distribuzione di concentrazione nel corpo dello slug, entro le sue estremità, si avvicina a quella del plume gaussiano in condizioni di stato stazionario. La concentrazione alle estremità dello slug decresce in modo che, se sono presenti altri slug adiacenti, le concentrazioni previste con il modello a plume vengono riprodotte quando sono sommati i contributi di tutti gli slug.
Calpuff permette non solo di scegliere tra questi due schemi ma consente anche un uso “ibrido”, che sfrutta i vantaggi del modello a slug vicino la sorgente e quelli del modello a puff in zone più distanti [70].
4.5.3.3 Coefficienti di dispersione
I coefficienti di dispersione vengono implementati tenendo conto principalmente della turbolenza atmosferica e di componenti di dispersione dovute alla spinta di galleggiamento. Il modello propone diverse opzioni per la determinazione dei coefficienti di dispersione, le principali sono:
1. “misure” dirette dei valori di turbolenza, σv e σw;
2. calcolo dei valori di σv e σw usando le variabili micrometeorologiche;
3. uso dei coefficienti di dispersione di Pasquill-Gifford (1976) per le aree rurali e di McElroy-Pooler (1968) per quelle urbane: questa opzione tiene conto del tipo di terreno (categoria di land use) e della classe di stabilità a cui sono associati dei
coefficienti che vengono inseriti nelle equazioni generali per il calcolo di σy e σz in
funzione della distanza sottovento.
Inoltre, in merito alla dispersione in atmosfera il modello prevede:
¾ procedure di calcolo per tener conto dell’asimmetria della dispersione verticale all’interno del PBL: in questo modo è possibile considerare la diversa dispersione che si ha nello strato superiore e in quello inferiore della zona di miscelamento, utile, in particolare, in quei casi in cui il pennacchio si presenta alto e galleggiante nella parte alta dell’atmosfera;
¾ opzioni per gli effetti della presenza di edifici ed ostacoli (building downwash): a seconda dell’altezza della sorgente rispetto alle dimensioni dell’edificio vengono implementati due diversi modelli che influenzano sia i coefficienti di dispersione che l’innalzamento del pennacchio;
¾ algoritmi per la dispersione in zone marine e costiere, che tengono conto della diversa struttura dello strato limite marino e della sua incidenza in termini di dispersione di inquinanti;
¾ possibilità di trattare calme di vento: in questo caso non è presente un algoritmo specifico, ma CALPUFF tiene conto del fenomeno attraverso modifiche sul codice che riguardano il tipo di rilascio e l’innalzamento degli slug, l’evoluzione durante gli intervalli di tempo e il modo di simulare gli effetti in vicinanza della sorgente.; in pratica il codice schematizza “la calma” considerando uno pseudo-trasporto nella direzione del vento calcolato da CALMET, in funzione della velocità del vento.
Nell’implementazione del calcolo si schematizzano anche i seguenti fenomeni: ¾ Innalzamento del pennacchio (plume rise);
¾ Orografia complessa: CALPUFF tiene conto dell’interazione tra puff e terreno sia su piccola che su grande scala. Per quanto riguarda la fisionomia del terreno su scala più grande, se ne tiene conto in CALMET, per la scala più piccola si fa riferimento ad una distinta subroutine del modello CTSG (Complex Terrain algorithm for SubGrid scale features).
¾ Deposizione a secco: il modello prevede diversi livelli di dettaglio nel trattare il fenomeno della deposizione secca; la variazione spazio-temporale del flusso di deposizione può essere calcolata:
1. mediante un modello “a resistenza”;
2. tramite l’inserimento da parte dell’utente della velocità di deposizione nell’arco delle 24 ore.
¾ Rimozione ad umido: lo scarico di inquinanti per rimozione ad umido è rappresentato come funzione del tasso di rimozione λ che dipende sia dalle caratteristiche dell’inquinante (solubilità, reattività) sia dalla natura della precipitazione (liquida o solida).
¾ Trasformazioni chimiche;
¾ Possibilità di descrivere la dispersione degli odori;
¾ Possibilità di modellare sorgenti areali, volumetriche e lineari [70].
4.5.4 INPUT DI CALPUFF
4.5.4.1 Dati meteorologici/territoriali
Tutti i principali dati meteorologici del dominio di studio, vengono forniti a CALPUFF mediante il file di output del preprocessore CALMET (CALMET.DAT). Il file contiene (oltre alle informazioni generali per quanto riguarda le dimensioni del dominio di studio e l’intervallo di tempo della simulazione ) le serie temporali giornaliere per le variabili meteorologiche con risoluzione oraria (intervallo di tempo su cui sono calcolate le concentrazioni).
CALMET è un pacchetto di simulazione per la ricostruzione del dominio meteorologico, il quale è in grado di sviluppare campi di vento sia diagnostici che prognostici, rendendo così il sistema capace di trattare condizioni atmosferiche complesse, variabili nel tempo e nello spazio. CALMET consente di tener conto di diverse caratteristiche, quali la pendenza del terreno, la presenza di ostacoli al flusso, la presenza di zone marine o corpi d’acqua. È dotato inoltre di un processore micrometeorologico, in grado di calcolare i parametri dispersivi all’interno dello strato limite (CBL), come altezza di miscelamento e coefficienti di dispersione; inoltre, consente di produrre campi tridimensionali di temperatura e, a differenza di altri processori meteorologici (come per esempio AERMET), calcola internamente la classe di stabilità atmosferica, tramite la localizzazione del dominio (coordinate UTM), l’ora del giorno e la copertura del cielo.
Nel caso si utilizzi il modello CALPUFF abbinato al preprocessore meteorologico CALMET, i dati richiesti in ingresso sono:
• caratteristiche del dominio computazionale (numero e dimensione delle celle della griglia);
• orografia;
• rugosità superficiale;
• condizioni meteorologiche, sia al suolo che in quota: velocità e direzione del vento, temperatura, pressione, umidità, precipitazioni, ecc.