CAPITOLO 5
I risultati dell’identificazione
5.1 Introduzione
In questo capitolo vengono presentati e analizzati i risultati dell’identificazione delle funzioni di trasferimento As, Yin, T, Zout, Gv e Gi, introdotte nei capitoli precedenti. Il punto di lavoro considerato è il seguente:
in
V Vc Rc V
30 2.5V (D=0.5) 60Ω
Sono state condotte varie prove variando sia il segnale di ingresso che il range di variazione rispetto ai valori del punto di lavoro. Qui sono riportate solo quelle che hanno prodotto i risultati più significativi.
5.2 Identificazione di As e Yin
5.2.1 Introduzione
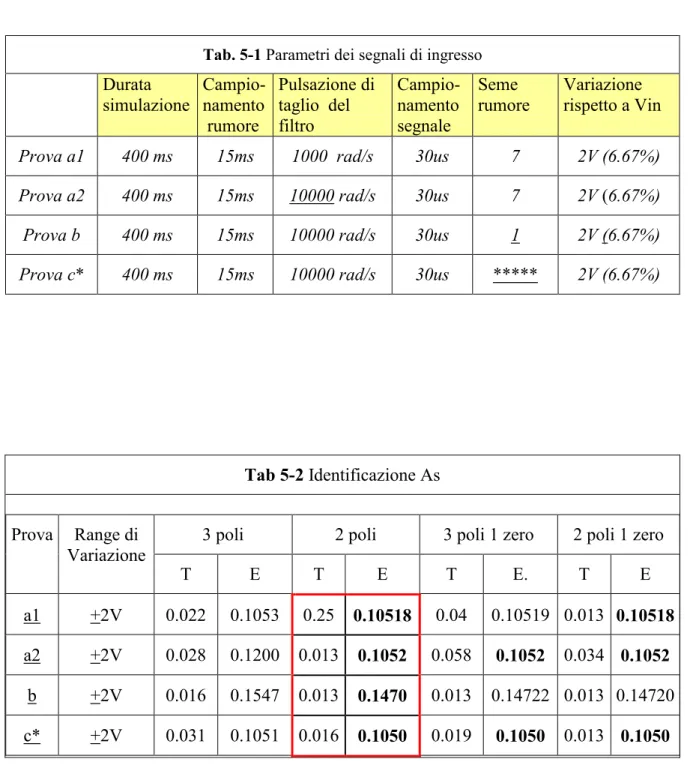
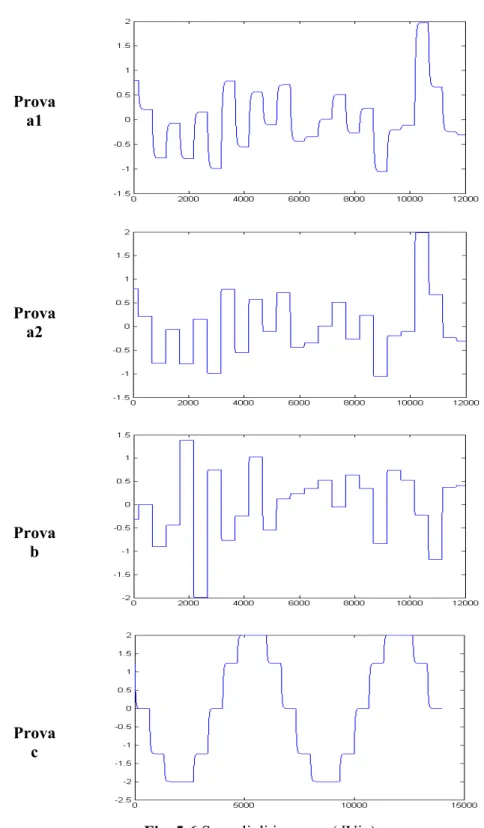
La tabella 5-1 descrive le caratteristiche degli ingressi usati nelle varie prove qui considerate. Tra queste ‘a1’ e ‘a2’ differiscono solo per il valore della pulsazione di taglio del filtro.La prova ‘b’ invece usa un nuovo ingresso. La prova ‘c’ si differenzia perché non usa come le altre un segnale rumoroso casuale ma un segnale che è stato ottenuto campionando in modo opportuno un segnale sinusoidale avente periodo uguale alla durata (400ms). Il segnale è riportato in figura 5-6.
5.2.2 Risultati
I risultati dell’identificazione di As e Yin sono riportati rispettivamente nelle tabelle 5-2 e 5-3, dove per ogni prova, al variare del numero dei poli e degli zeri, viene riportata la finestra di integrazione T e l’errore medio E nella risposta al segnale di ingresso, ovvero il minimo scostamento tra la risposta del modello e la risposta del sistema. Come gia spiegato nel capitolo precedente il valore E riportato è il minimo tra gli errori medi calcolati all’interno di un set di prove ottenuto mantenendo fisso l’ingresso e variando solo la durata della finestra di integrazione da 0.001s a 0.1s con passo di 0.003s. Il range di variazione dell’ingresso è 2V, pari cioè al 6.67% del valore operativo della tensione di linea (30V). Per ogni prova, viene evidenziato in grassetto il valore minimo dell’indice E al variare del numero di poli e zeri.
Tab. 5-1 Parametri dei segnali di ingresso
Durata
simulazione Campio-namento rumore Pulsazione di taglio del filtro Campio- namento segnale Seme
rumore Variazione rispetto a Vin Prova a1 400 ms 15ms 1000 rad/s 30us 7 2V (6.67%) Prova a2 400 ms 15ms 10000 rad/s 30us 7 2V (6.67%) Prova b 400 ms 15ms 10000 rad/s 30us 1 2V (6.67%) Prova c* 400 ms 15ms 10000 rad/s 30us ***** 2V (6.67%)
Tab 5-2 Identificazione As
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero Prova Range di Variazione T E T E T E. T E a1 +2V 0.022 0.1053 0.25 0.10518 0.04 0.10519 0.013 0.10518 a2 +2V 0.028 0.1200 0.013 0.1052 0.058 0.1052 0.034 0.1052 b +2V 0.016 0.1547 0.013 0.1470 0.013 0.14722 0.013 0.14720 c* +2V 0.031 0.1051 0.016 0.1050 0.019 0.1050 0.013 0.1050
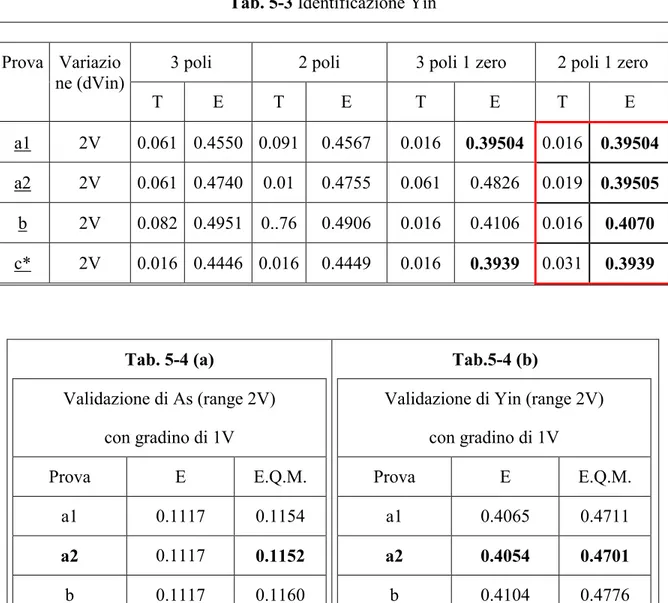
Tab. 5-3 Identificazione Yin
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero
Prova Variazio ne (dVin) T E T E T E T E a1 2V 0.061 0.4550 0.091 0.4567 0.016 0.39504 0.016 0.39504 a2 2V 0.061 0.4740 0.01 0.4755 0.061 0.4826 0.019 0.39505 b 2V 0.082 0.4951 0..76 0.4906 0.016 0.4106 0.016 0.4070 c* 2V 0.016 0.4446 0.016 0.4449 0.016 0.3939 0.031 0.3939 Tab. 5-4 (a) Validazione di As (range 2V) con gradino di 1V Prova E E.Q.M. a1 0.1117 0.1154 a2 0.1117 0.1152 b 0.1117 0.1160 c 0.1117 0.1158 Tab.5-4 (b)
Validazione di Yin (range 2V) con gradino di 1V Prova E E.Q.M. a1 0.4065 0.4711 a2 0.4054 0.4701 b 0.4104 0.4776 c 0.4059 0.4703
5.2.3 Analisi dei risultati
In riferimento all’identificazione di As, dall’analisi della tabella 5-2 emerge quanto segue: 1. Le prove effettuate con range di variazione di 2V non individuano un modello unico
costante al variare del numero di singolarità del modello. Di fatto, dall’esame delle mappe poli-zeri, i modelli ottenuti risultano equivalenti (se ragioniamo in termini di cancellazione poli-zeri). Si può dunque scegliere per ogni prova il modello più semplice ossia quello con soli due poli, in accordo anche con i risultati della identificazione analitica.
2. Analizzando la tabella in verticale, limitatamente alla colonna con 2 poli, si vede che la prova ’b’ ha un valore di E maggiore rispetto alle altre prove ad indicare che l’ingresso usato in questo caso produce un scostamento maggiore sulla risposta al rumore.
A conferma del punto 2 sono state confrontate, per ogni prova, la risposta al gradino del sistema e quella del modello, misurando oltre all’errore medio anche l’errore quadratico medio. I risultati, riassunti in tabella 5-4(a) decretano a2 il migliore modello nel range di variazione di 2V.
Dalla tabella 5-3in merito alla identificazione di Yin, risulta che: 1. Il miglior modello presenta due poli e uno zero
2. Il modello migliore sembrerebbe quello della prova ‘c’ in realtà dalla tabella di validazione 5-4 (b) si evince che il migliore è quello identificato con la prova ‘a2’.Il segnale usato in ‘c’ non si è dimostrato particolarmente efficace in questo caso. Il punto uno è in accordo con il risultato della modellazione analitica.
1 0008584 . 0 10 727 . 1 96 . 1 2 6 + + ⋅ = − s s As 1 0008227 . 0 10 745 . 1 065 . 0 001784 . 0 2 2 + + ⋅ + = S S S Yin
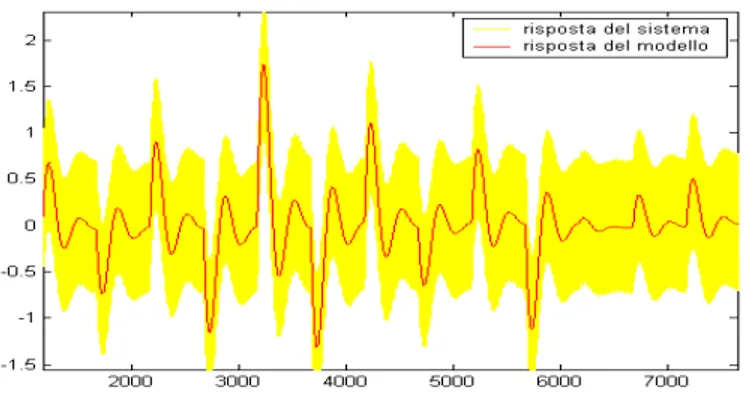
La figura 5-1 illustra la mappa poli zeri delle funzioni identificate. Le figure 5-2 e 5-3 mostrano lo scostamento tra la riposta al gradino del modello e la risposta al gradino del sistema simulato, in figura 5-4 e 5-5 sono riportate invece le uscite del modello e del sistema in risposta al segnale rumoroso di ingresso .I segnali di ingresso usati nelle varie prove sono riportati in figura 5-6.
Fig 5-1 Poli e zeri dei modelli identificati
Fig 5-3 Validazione con gradino del miglior Yin (prova a2)
Fig 5-4 Risposte al rumore di As (prova a2)
Prova a1 Prova a2 Prova b Prova c
5.3 Identificazione di T e Zout
5.3.1 Introduzione
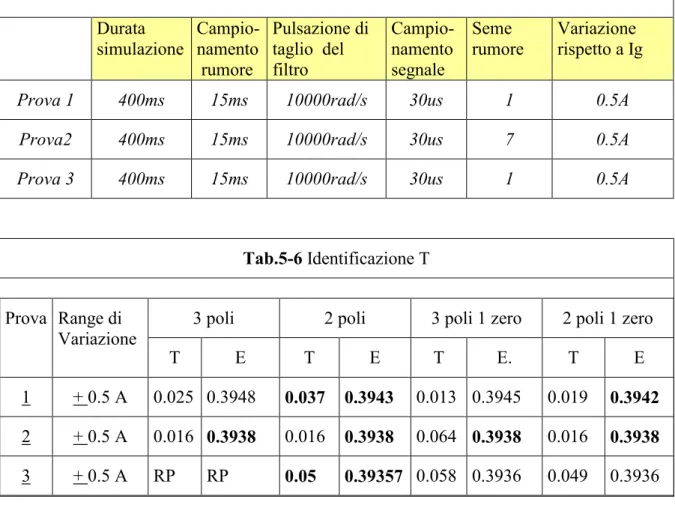
Il range di variazione dell’ingresso in questo caso è di 0.5 A. Vengono riportate tre prove I dati relativi alla generazione degli ingressi sono riportati in tabella 5-5.
5.3.2 Risultati
I risultati dell’identificazione di T e Zout sono riportati rispettivamente nelle tabelle 5-6 e 5-7 con le stesse modalità usate per l’identificazione di As eYin..
Tab. 5-5 Parametri del segnale di ingresso
Durata simulazione Campio-namento rumore Pulsazione di taglio del filtro Campio- namento segnale Seme rumore Variazione rispetto a Ig
Prova 1 400ms 15ms 10000rad/s 30us 1 0.5A Prova2 400ms 15ms 10000rad/s 30us 7 0.5A Prova 3 400ms 15ms 10000rad/s 30us 1 0.5A
Tab.5-6 Identificazione T
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero Prova Range di Variazione T E T E T E. T E 1 + 0.5 A 0.025 0.3948 0.037 0.3943 0.013 0.3945 0.019 0.3942 2 + 0.5 A 0.016 0.3938 0.016 0.3938 0.064 0.3938 0.016 0.3938 3 + 0.5 A RP RP 0.05 0.39357 0.058 0.3936 0.049 0.3936
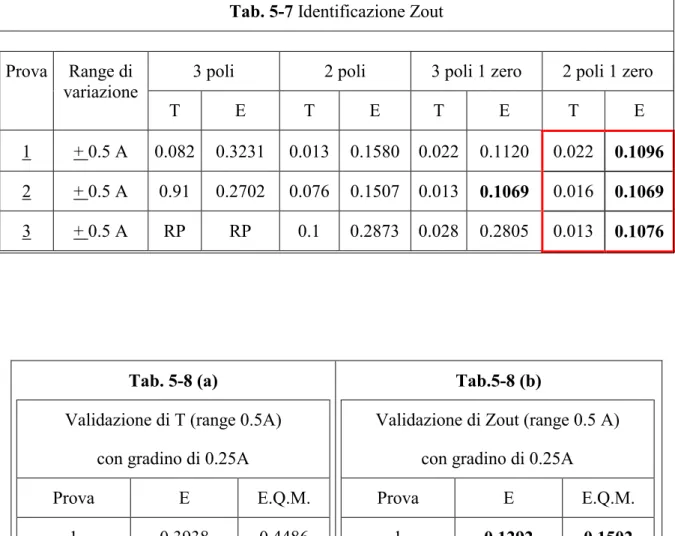
Tab. 5-7 Identificazione Zout
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero Prova Range di variazione T E T E T E T E 1 + 0.5 A 0.082 0.3231 0.013 0.1580 0.022 0.1120 0.022 0.1096 2 + 0.5 A 0.91 0.2702 0.076 0.1507 0.013 0.1069 0.016 0.1069 3 + 0.5 A RP RP 0.1 0.2873 0.028 0.2805 0.013 0.1076 Tab. 5-8 (a)
Validazione di T (range 0.5A) con gradino di 0.25A
Prova E E.Q.M.
1 0.3938 0.4486
2 0.3938 0.4487
3 0.3938 0.4486
Tab.5-8 (b)
Validazione di Zout (range 0.5 A) con gradino di 0.25A
Prova E E.Q.M.
1 0.1292 0.1502
2 0.1314 0.1538
3 0.1295 0.1512
5.3.3 Analisi dei risultati
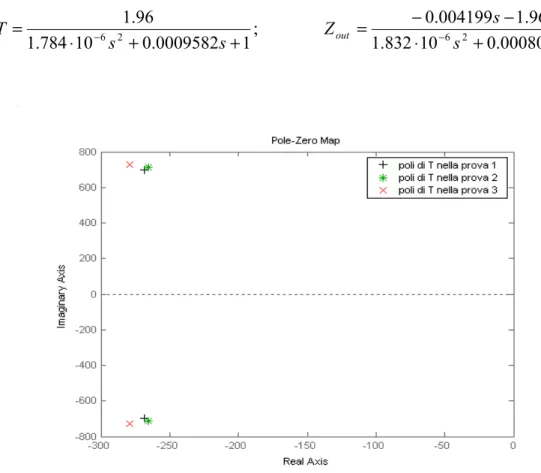
Dall’esame della tabella 5-6 risulta che l’identificazione di T ha prodotto modelli tutti con lo stesso grado di validità. Sono stati sottoposti a validazione con gradino di 0.25 A ( pari al
delle tre prove. I risultati di tale validazione, riassunti in tabella 5-8(a), confermano la equivalenza dei tre modelli trovati. Se si esamina la figura 5-7, che mostra i poli dei modelli a due poli identificati in ‘1’, ‘2’ e in ‘3’, si può avere una idea dell’incertezza prodotta in questo caso dalla identificazione.
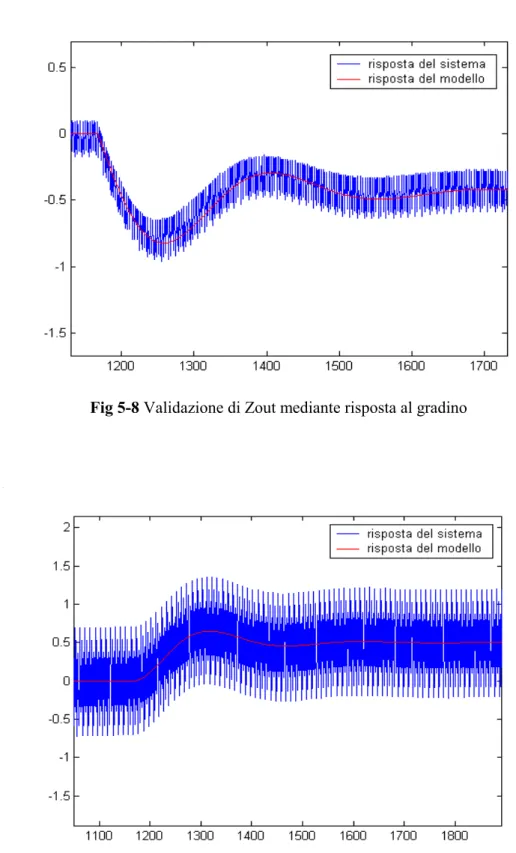
Relativamente a Zout, invece, dall’esame della tabella 5-7 risulta molto evidente che il modello migliore ha due poli e uno zero, in accordo con la identificazione analitica. Dalla tabella 5-8 (b) si deduce che il modello migliore sulle tre prove è quello relativo alla prova ‘1’.Scegliendo la prova ‘1’ anche per l’identificazione di T, i modelli migliori sono:
1 0009582 . 0 10 784 . 1 96 . 1 2 6 + + ⋅ = − s s T ; 1 0008095 . 0 10 832 . 1 96 . 1 004199 . 0 2 6 + + ⋅ − − = − s s Zout
Fig 5-8 Validazione di Zout mediante risposta al gradino
Prova 1.
Prova 2.
Prova 3.
5.4 Identificazione di Pv e Pi
5.4.1 Introduzione
Il modulatore PWM usato stabilisce proporzionalità diretta tra duty-cicle e tensione di controllo per cui valgono le seguenti relazioni relazioni:
) ( 5 ˆ ˆ ˆ ˆ ) ( G s v v V d v s P v c out s out v = = ⋅ = ⋅
) ( 5 ˆ ˆ ˆ ˆ ) ( G s v i V d i s P i c in s in i = = ⋅ = ⋅
In questa sezione vengono identificati direttamente Gv e Gi.
Sono stati condotti due gruppi di prove usando i segnali riportati nelle figure 5-11 e 5-12 .
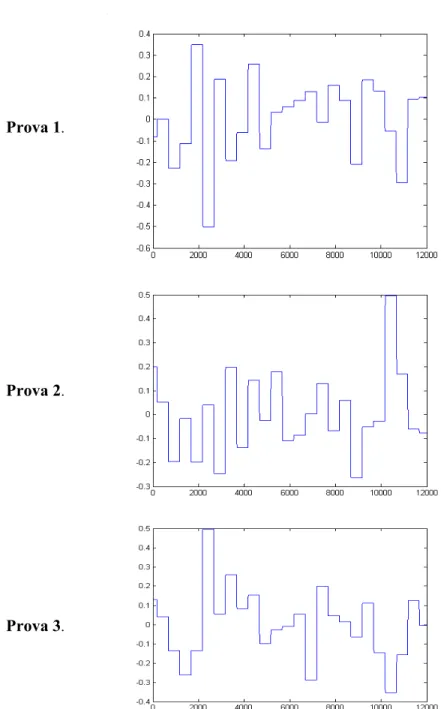
Fig.5-12 Segnale di ingresso nelle prove Q1,Q2,Q3
Per ogni gruppo sono stati analizzati tre diversi range di variazione per l’ingresso, ottenendo così, in totale, sei modelli alle variazioni ognuno valido nel proprio range. Ciascuno di questi modelli è stato sottoposto a validazione mediante gradino di ampiezza pari alla metà del valore del relativo range .I dati riguardanti la generazione degli ingressi delle varie prove sono riportati in tabella 5-9.
Tab. 5-9 Parametri del segnale di ingresso usato
Durata simulazione Campionamento rumore Pulsazione di taglio del filtro Campionamento segnale Variazione rispetto a Vc P1 400ms 15ms 7000rad/s 30us + 0.1V P2 400ms 15ms 7000rad/s 30us + 0.2V P 3 400ms 15ms 7000rad/s 30us + 0.25V Q1 400ms 15ms 10000rad/sec 30us + 0.12V Q2 400ms 15ms 10000rad/sec 30us + 0.24V Q3 400ms 15ms 10000rad/sec 30us + 0.29V
5.4.2 I risultati
I dati relativi alla identificazione sono riassunti nelle tabelle 5-10 e 5-11, mentre i dati relativi alla fase di validazione sono esposti nelle tabelle 5-12 a) e 5-12 b). Come nei paragrafi precedenti,‘E’ rappresenta l’errore medio mentre ‘EQM’ è l’errore quadratico medio definito in (4.2).
Tab. 5-10 Identificazione di Gv
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero Prova Range di Variazione T E T E T E. T E P1 + 0.1 0.013 0.1106 0.01 0.1073 0.034 0.1147 0.013 0.1108 P2 + 0.2 0.019 0.2724 0.013 0.2131 0.016 0.2273 0.001 0.2318 P3 + 0.25 0.022 0.5879 0.013 0.3215 0.016 0.3313 0.01 0.3481 Q1 + 0.12V 0.013 0.1136 0.013 0.1134 0.028 0.1185 0.01 0.1138 Q2 + 0.24V 0.013 0.3023 0.022 0.2656 0.025 0.3990 0.013 0.3161 Q3 + 0.29V 0.016 0.8215 0.022 0.4084 0.034 0.4729 0.01 0.4751
Tab. 5-11 Identificazione di Gi
3 poli 2 poli 3 poli 1 zero 2 poli 1 zero Prova Range di Variazione T E T E T E. T E P1 + 0.1 0.076 0.4543 0.055 0.4633 0.022 0.3934 0.028 0.3929 P2 + 0.2 0.088 0.5672 0.097 0.5674 0.013 0.4359 0.019 0.4263 P3 + 0.25 0.005 0.5814 0.005 0.5678 0.011 0.4625 0.011 0.4548 Q1 + 0.12V 0.079 0.4769 0.067 0.4767 0.013 0.3963 0.019 0.3961 Q2 + 0.24V 0.079 0.6289 0.067 0.6278 0.013 0.4693 0.016 0.4377 Q3 + 0.29V 0.079 0.7043 0.067 0.7057 0.022 0.5567 0.013 0.4791 Tab. 5-12 (a) Validazione di Gv con gradino
Range Prova E E.Q.M
0.1V P1 0.1111 0.1218 0.2V P2 0.1178 0.1260 0.25V P3 0.1211 0.1279 0.12V Q1 2p.&1 z. 0.1125 0.1165 0.12V Q1 2p. 0.1125 0.1169 0.24V Q2 0.1406 0.1726 0.29V Q3 0.1956 0.2287 Tab.5-12 (b) Validazione di Gi con gradino
Range Prova E E.Q.M.
0.1V P1 0.3997 0.4607 0.2V P2 0.4142 0.4823 0.25V P3 0.4305 0.5064 0.12V Q1 0.4012 0.4624 0.24V Q2 0.4115 0.4760 0.29V Q3 0.4234 0.4939
5.4.3 Analisi dei risultati
I risultati della tabella 5-10 mostrano che la identificazione di Gv privilegia un modello avente solo 2 poli, in disaccordo con la identificazione analitica che individua un modello con 2 poli e 1 zero. Da notare però è la prova Q1, relativa ad un range di 0.12V,dove il valore di ‘E’ varia poco al variare del numero dei poli e degli zeri .Relativamente a questa prova , sono state confrontate le risposte al gradino(di 0.06V) del modello con due poli e di quello con due poli e uno zero : in questo caso , come si vede dalla tabella 5-12 a), il modello con 2 poli e 1 zero ha un indice di errore anche minore di quello con 2 poli seppure di poco.
L’identificazione di Gi invece individua un modello con 2 poli e uno zero su tutti i range di variazioni considerati. I risultati in questo caso sono riportati in tabella 5-11.
La tabella 5-12 riassume i risultati della fase di validazione dei migliori modelli trovati per ogni range di variazione.
Se scegliamo come range quello di 0.12V, pari al 4.8% del valore di Vc, i modelli migliori per Gv e Gs, nel range di 0.12V sono rispettivamente i seguenti:
1 0008994 . 0 10 822 . 1 25 0002243 . 0 2 6 + + ⋅ + − = − s s s Gv ; 1 0009168 . 0 10 802 . 1 2 02682 . 0 2 6 + + ⋅ + = − s s s Gi ;
Si noti che, in conformità con la modellazione analitica effettuata in precedenza, il modello di Gv trovato presenta uno zero reale positivo abbastanza distante dall’asse immaginario (vedi figura 5-13). Le risposte al gradino dei modelli sono riportate nelle figure 5-14 e 5-15.
Fig. 5-14 Validazione di Gv (range 0.12V) : Ampiezza gradino = 0.06V; EQM=0.1165
Fig 5-15 Validazione di Gi (range 0.12V): Ampiezza gradino = 0.06V; EQM=0.4624
Tab. 5-13 Identificazione Boost
Variazione rispetto a Vin di 2V (6.67%)
Funzioni di trasferimento EQM
1 0008584 . 0 10 727 . 1 96 . 1 2 6 + + ⋅ = − s s As 0.1152 1 0008227 . 0 10 745 . 1 065 . 0 001784 . 0 2 6 + + ⋅ + = − S S S Yin 0.4701 Variazione i_g di 0.5A
Funzioni di trasferimento EQM
1 0009582 . 0 10 784 . 1 96 . 1 2 6 + + ⋅ = − s s T 0.4486 1 0008095 . 0 10 832 . 1 96 . 1 004199 . 0 2 6 + + ⋅ − − = − s s Zout 0.1502 Variazione rispetto a Vc di 0.12V (4.8%)
Funzioni di trasferimento EQM
1 0008994 . 0 10 822 . 1 25 0002243 . 0 2 6 + + ⋅ + − = − s s s Gv 0.1165 1 0009168 . 0 10 802 . 1 2 02682 . 0 2 6 + + ⋅ + = − s s s Gi 0.4624
5.5 Riepilogo
Riassumendo, le sei funzioni di trasferimento individuate sono quelle riportate in tabella 5-13. L’indice di errore EQM si riferisce alla risposta al gradino di ampiezza pari alla metà del valore del range.Le mappe poli-zeri dei modelli sono illustrate in figura 5-16, dove però per ragione di visibilità grafica è stato tralasciato il polo reale positivo di Gv.
5.6 Semplificazione del sistema
I poli delle varie fdt. sono tutti complessi e coniugati a parte reale negativa e sono concentrati in una stessa zona del piano complesso.Nel sistema lineare in realtà tali poli dovrebbero coincidere, cosi come accade per i modelli analitici Possiamo dunque effettuare una semplificazione di modello piazzando i poli del sistema nel il baricentro geometrico della nuvoletta individuata dai poli delle sei fdt. calcolate.
Poli As 100 * (-2.4852 + 7.1922i)
Poli Yin 100 * (-2.3573 + 7.1937i)
Poli Gv 100 * (-2.4654 + 6.9862i)
Poli Gi 100 * (-2.5438 + 7.0016i)
Poli T 100 * (-2.6855 + 6.9887i)
Poli Zout 100 * (-2.2093 + 7.0501i)
Poli Sistema 100 * (-2.4604 + 7.0688i)
Tab. 5-14 Identificazione Boost semplificato Variazione rispetto a Vin di 2V (6.67%)
Funzioni di trasferimento EQM
) ( 96 . 1 s D As = 0.1171 ) ( 065 . 0 001784 . 0 s D Yin = + 0.4672 Variazione rispetto a Ig di 0.5A
Funzioni di trasferimento EQM
) ( 96 . 1 s D T = 0.4486 ) ( 96 . 1 004199 . 0 s D s Zout = − − 0.1246 Variazione rispetto a Vc di 0.12V (4.8%)
Funzioni di trasferimento EQM
) ( 25 002243 . 0 s D s Gv = − + 0.1173 ) ( 2 002682 . 0 s D s Gi = + 0.4625 1 0009275 . 0 10 756 . 1 ) (S = ⋅ −6s2 + s+ D
In tabella 5-14 sono riportati anche i nuovi valori dell’errore quadratico medio in risposta al gradino (di ampiezza pari al 50% del valore di range), in seguito alla semplificazione. E’ possibile così confrontare i nuovi modelli con quelli determinati in precedenza. La tabella 5-15 illustra questo confronto. Dalla sua analisi si può dedurre che l’indice di errore, dopo la semplificazione di modello si mantiene quasi invariato.
Tab 5-15
fdt EQM prec. EQM succ.
As 0.1152 0.1171 Yin 0.4701 0.4672 Zout 0.1292 0.1301 T 0.4486 0.4486 Gv 0.1165 0.1173 Gi 0.4624 0.4625