CAPITOLO 1
LE SOSPENSIONI
1.1 Introduzione
Nella dinamica di un qualsiasi veicolo o motoveicolo rivestono particolare importanza le sospensioni. La loro funzione è quella di garantire l’aderenza tra ruota e terreno (e quindi la tenuta di strada) e allo stesso tempo di isolare il passeggero dalle irregolarità del terreno (comfort). Questo capitolo è volto a introdurre la problematica delle sospensioni dandone, per prima cosa, una classificazione e illustrando i principi di funzionamento. In seguito si darà cenno ai movimenti tipici di un motoveicolo in relazione anche alla taratura delle sospensioni.
1.2 Classificazione delle sospensioni
Per prima cosa si può pensare di andare a studiare le sospensioni classificandole in funzione della loro struttura, come segue:
• Sospensioni passive; • Sospensioni semi‐attive; • Sospensioni attive.
Le sospensioni passive sono le più semplici ed economiche, sono quelle montante sulla maggior parte dei veicoli di basso costo. Esse sono composte da una molla e uno smorzatore i cui parametri sono scelti in fase di progetto dalla casa costruttrice e non possono essere variati. Tale operazione viene affidata a un gruppo di collaudatori che in modo empirico scelgono valori di compromesso che siano sufficientemente adeguati a ogni situazione, tenendo conto dell’impostazione, sportiva o meno, che si vuole dare al mezzo.
La struttura delle sospensioni semi‐attive è ancora composta da una molla e da uno smorzatore, il cui coefficiente di smorzamento può però essere variato mediante un sistema di controllo.
Nelle sospensioni attive è invece presente un terzo elemento, costituito da un attuatore in grado di generare una forza per stabilizzare il veicolo. Il vantaggio dell’utilizzo delle sospensioni semi‐attive o attive sta nella possibilità di migliorare, rispetto a quelle passive, sia la tenuta di strada sia il comfort di guida. Sebbene le sospensioni attive siano le migliori dal punto di vista delle prestazioni, il consumo di energia e le dimensioni dei componenti (l’attuatore in particolare) ne limitano molto l’utilizzo.
1.3 Descrizione della struttura di una sospensione
Le sospensioni assorbono dunque le irregolarità del terreno e oltre a isolare l’abitacolo dalle sollecitazioni trasmesse dalle ruote, fanno sì che queste ultime rimangano sempre appoggiate al terreno stesso, garantendo l’indispensabile direzionalità. In sintesi si può definire il pilota, il telaio e il gruppo motopropulsore con il termine di massa sospesa, mentre le ruote (cerchio, gomma, impianto dei freni e parte della trasmissione) sono la massa non sospesa. L’unione tra queste due parti è garantita dalla sospensione composta da un sistema elastico (il pneumatico, l’aria con il quale è gonfiato, la molla o la balestra o la barra di torsione in funzione dello schema impiegato) e da un elemento smorzatore (l’ammortizzatore). Quando una ruota supera una irregolarità del terreno si solleva e l’elemento elastico della sospensione si comprime immagazzinando energia. In una seconda fase l’elemento elastico si estende facendo alzare la massa non sospesa. Segue poi una ulteriore compressione causata dal peso della struttura del motoveicolo. Il processo continua con un andamento ondulatorio, fino a quando gli inevitabili attriti lo fanno lentamente terminare. L’ammortizzatore deve controllare e smorzare queste oscillazioni che si ripetono con una frequenza e ampiezza stabilita dai parametri fisici della sospensione. In questo modo è perciò possibile modulare e modificare il lavoro dell’elemento elastico. Esistono diversi tipi di ammortizzatori ma quelli maggiormente utilizzati in campo automobilistico sono telescopici e idraulici. Una estremità dello smorzatore (l’ammortizzatore) è collegato al braccio della sospensione e cioè alla massa non sospesa, mentre l’altra estremità è collegata ad un
supporto specifico (il duomo) ricavato sulla massa sospesa e cioè sul telaio del veicolo. L’ammortizzatore assorbe e dissipa l’energia immagazzinata dalla molla, sfruttando l’azione di un dispositivo idraulico posizionato nel suo involucro circolare (tubo) che contiene olio. Più è veloce il movimento dello stelo dell’ammortizzatore, maggiore sarà il lavoro che occorre compiere per spostarlo (il suo movimento diventa più difficoltoso). Sulla estremità dell’ammortizzatore (lo stelo) che scorre nell’interno dell’involucro tubolare, è fissato un pistone che separa due camere. Quando lo stelo si muove l’olio deve spostarsi da un volume all’altro, passando attraverso delle valvole specifiche (solitamente lamelle) montate sul pistone e opponendo perciò resistenza alla traslazione dello stesso stantuffo. Come è intuitivo immaginare se si cambia la conformazione delle valvole o la densità dell’olio, varia radicalmente il funzionamento dell’ammortizzatore. Esso dissipa l’energia immagazzinata dalla molla trasformandola in calore, generato dalla compressione del fluido all’interno dell’involucro tubolare e dalla sua laminazione (passaggio) attraverso le lamelle sul pistone. Poiché le caratteristiche dell’olio variano in funzione della temperatura è facile intuire che lo smorzatore avrà un comportamento diverso a seconda dello suo stato termico. Se infatti non è possibile raffreddarlo per smaltire il calore che genera o è montato vicino a fonti di calore (ad esempio un tubo del sistema di scarico del motore), avrà un funzionamento sensibilmente variabile (lo smorzamento sarà elevato nei primi istanti di movimento a freddo e poi diminuirà man mano che aumenta la temperatura). In alcuni tipi di ammortizzatori detti a gas una parte del tubo è riempita con gas (azoto) alla pressione di 20 – 30 bar. Un separatore mobile lo divide dall’olio. In condizioni di riposo il gas agisce sul separatore e sull’olio, mantenendo il pistone e perciò lo stelo nella posizione di fine corsa. L’ammortizzatore rimane dunque completamente esteso. Quando invece lo stelo si muove sollecitato da una irregolarità
stradale, il pistone si sposta nel volume d’olio e quello in pressione che si trova sopra di esso, muove il separatore mobile che a sua volta comprime il gas. La pressione di questo gas viene sfruttata anche per compensare le variazioni del volume nel tubo che contiene l’olio, che avvengono durante il movimento dello stelo. Negli ammortizzatori senza gas, attorno al cilindro nel quale scorre lo stantuffo, esiste una camera concentrica che contiene l’olio di riserva che può entrare o uscire dal volume nel quale scorre il pistone, attraversando specifiche valvole. Tale compensazione è necessaria poiché lo stelo penetrando nell’ammortizzatore o uscendo dallo stesso, occupa o libera una frazione di spazio che deve essere necessariamente riempita o liberata dall’olio. In sintesi il volume in cui si muove lo stantuffo non è costante. La struttura di un ammortizzatore viene riassunta dalle immagini seguenti.
Figura 1.1 Struttura di un ammortizzatore. [8]
La Figura 1.1 mostra le parti principali di un ammortizzatore con gas (posto nella camera a volume_variabile). Le valvole 1 e 2 sono unidirezionali e lasciano passare perciò l’olio in un solo verso (opposto per ciascuna delle due valvole). L’occhiello superiore ed inferiore, applicati
allo stelo e al corpo tubolare, permettono di fissare l’ammortizzatore al telaio (massa non sospesa) e alla sospensione (massa sospesa).
Figura 1.2 – Funzionamento dell’amortizzatore a olio.[8]
In Figura 1.2 è invece possibile vedere come l’olio dell’ammortizzatore venga compresso nella parte superiore o inferiore del volume, in funzione del movimento dello stelo e passi da un volume all’altro attraverso le valvole che si trovano sul pistone. Con questo particolare funzionamento, l’ammortizzatore è in grado di smorzare le oscillazioni dell’elemento elastico.
Figura 1.3 – Funzionamento dell’ammortizzatore a gas.[8]
Nel caso in cui, invece, l’ammortizzatore ha separatore mobile con volume superiore riempito con gas in pressione (Figura 1.3), quando è a riposo lo stelo rimane completamente esteso (posizione di sinistra). Diversamente, quando l’ammortizzatore lavora, il separatore mobile si sposta comprimendo il gas sopra di esso. In questo modo è possibile compensare le variazioni di volume dovute all’ingresso ed uscita dello stelo nell’ammortizzatore.
1.4 Tipologie di ammortizzatori semi‐attivi
Un ammortizzatore semi‐attivo presenta una struttura formata ancora da una molla e da uno smorzatore, con la possibilità di poter variare i coefficienti di smorzamento in funzione di una corrente di controllo, come mostrato in Figura 1.4.
Figura 1.4 Caratteristica di un ammortizzatore a smorzamento variabile. E’ possibile distinguerne tre tipi: Ammortizzatori CDC (Continuously Damping Control) Ammortizzatori ER (Elettroreologici) Ammortizzatori MR (Magnetoreologici)
1.4.1 Ammortizzatori CDC
Il funzionamento è basato sulla variazione della dimensione degli orifizi che collegano la camera superiore e inferiore del pistone dell’ammortizzatore. Viene, cioè, fatta cambiare la velocità con la sospensione torna alla posizione di equilibrio.
Quando la sospensione viene sollecitata da un’asperità stradale l’olio viene forzato a passare nei fori presenti. Riducendo la sezione di passaggio si genera una trasformazione del moto dell’olio da laminare a turbolento. In tal caso i vettori di velocità non sono più tutti orientati nella stessa direzione, assumono un andamento casuale che genera numerosi urti molecolari. Questo produce un aumento dell’attrito viscoso e una conseguente diminuzione della velocità di estensione e compressione della sospensione. Viene fatta cambiare quindi la velocità con cui la sospensione torna alla posizione di equilibrio. In questo modo cambia lo smorzamento dell’ammortizzatore stesso. In Figura 1.5 è mostrata una sezione di un ammortizzatore di tipo CDC, ed è possibile notare un meccanismo per la variazione degli orifizi. Più schematicamente l’ammortizzatore CDC è invece mostrato in Figura 1.6, dove S rappresenta la superficie del pistone, σ l’area di un generico orifizio e w la velocità del pistone stesso. La caratteristica in estensione e compressione è asimmetrica. Il tempo di risposta dei CDC è di circa 30‐40 ms. Il meccanismo che agisce sugli orifizi è pilotato da valvole solenoidi che richiedono correnti comprese tra 0 e 1.5A. La potenza richiesta da questo tipo di ammortizzatori è stimata intorno ai 10 W.
Figura 1.5 ‐ Sezione di un ammortizzatore CDC.
1.4.2 Ammortizzatori MR
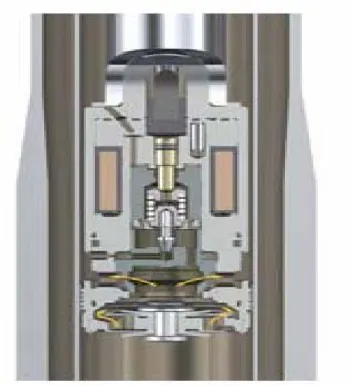
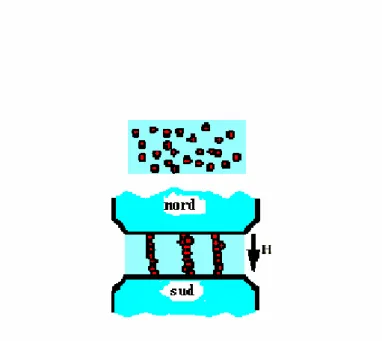
Utilizzano al loro interno dei fluidi di tipo magnetoreologico. Questi materiali presentano una viscosità variabile in funzione del campo magnetico applicato. In particolare le particelle vengono polarizzate formando delle catene parallele alle linee di campo, come mostrato in Figura 1.8. Questo fenomeno rende lo smorzamento dipendente dal campo magnetico. In Figura 1.7 viene mostrato una sezione di un ammortizzatore MR con i rispettivi elementi costitutivi, in particolare la parte responsabile dell’eccitazione del materiale magnetoreologico.
Figura 1.7 Sezione di un ammortizzatore MR.
Figura 1.8 Principio di polarizzazione di un materiale magneto reologico.
1.4.3 Ammortizzatori ER
Funzionano in modo analogo rispetto ai precedenti, utilizzando ovviamente materiali che possiedono il comportamento già descritto ma in funzione del campo elettrico. Gli ultimi due tipi di ammortizzatori descritti hanno dei tempi di risposta molto ridotti (circa 1 ms), ma presentano l’inconveniente di possedere una caratteristica simmetrica in compressione ed estensione, come indicato in Figura 1.9. Tale caratteristica è anche rappresentativa del funzionamento ammortizzatori di tipo MR, a cui fa espressamente riferimento.
Figura 1.9 caratteristica di un ammortizzatore MR nel caso specifico,
ma rappresentativa anche per un ammortizzatore ER.
Eliminare il problema della contaminazione dei materiali ER e MR rappresenta oggi uno dei limiti sull’affidabilità di lungo periodo dei due tipi di ammortizzatore ora descritti, e li rende più costosi rispetto agli ammortizzatori CDC.
1.5 Movimenti tipici nella dinamica del motoveicolo
Quando un corpo è in rotazione attorno a un asse e gliene viene impressa un’altra attorno a un asse perpendicolare al primo, si genera un momento chiamato effetto giroscopico nella direzione perpendicolare ai due assi come mostrato in Figura 1.10. Figura 1.10 Esempio di effetto giroscopico. È quindi chiaro che un motoveicolo è sottoposto a diversi fenomeni: •sterzata: generata dalla ruota anteriore quando si sterza; •rollio: generato dalla moto quando si va in piega; •imbardata: generata dalle ruote in rotazione attorno al loro asse e all’asse della curva; •effetto giroscopico generato dal motore.Tralasciando il primo e l’ultimo fenomeno, il rollio e l’imbardata dipendono dalla taratura delle sospensioni.
Figura 1.11 rollio.
Figura 1.12 imbardata.
Il rollio e l’imbardata sono eventi stabilizzanti, nel senso che i momenti generati tendono infatti a mantenere dritta la moto. L’influenza che le sospensioni hanno su questi due comportamenti dipende sia dalle caratteristiche statiche, sia da quelle dinamiche delle stesse, in particolare è utile avere un accordo tra rigidità e smorzamento della sospensione. In
generale un eccessivo smorzamento rende la moto meno agile nei cambi di traiettoria e tende a scomporla in frenata.
1.6 Caratteristiche statiche e dinamiche di una
sospensione
Le sospensioni possono essere rappresentate da una molla con in parallelo un elemento smorzante. Entrambi gli elementi hanno una funzione importante nella determinazione dell’assetto del motoveicolo. La molla non viene mai sollecitata a trazione, essa viene sempre montata in modo tale da essere sempre leggermente compressa. Questa compressione iniziale è detta precarico. Aumentando il precarico della molla non se ne influenza la rigidità, perché essa dipende solo dal materiale, dallo spessore del filo utilizzato e dal diametro delle spire. Tuttavia una variazione del precarico influenza la soglia oltre la quale la molla inizia a comprimersi. In generale una riduzione del precarico della sospensione posteriore rende la moto più stabile in rettilineo ma più lenta nell’inserimento in curva. Al contrario un aumento del precarico rende la moto più agile con una perdita di stabilità alle alte velocità.
L’elemento smorzante è quello che regola la velocità con cui la sospensione torna alla posizione di equilibrio. Sui motoveicoli è possibile regolare sia la frenatura in compressione, sia la frenatura in estensione. È importante accordare la molla con il relativo ammortizzatore, evitando ad esempio di precaricare troppo poco la molla e di impostare un freno idraulico troppo elevato, con la conseguenza di ottenere una sospensione che affonda troppo e impiega un tempo eccessivo per riportarsi alla posizione di equilibrio.
Se, da una parte, va notato che i due principali obiettivi da raggiungere mediante l’utilizzo delle sospensioni sono:
• Comfort di guida: legato all’isolamento del veicolo, e quindi del conducente, dalle asperità del terreno;
• Tenuta di strada: legata alla forza di contatto tra pneumatico e asfalto,
è importante osservare che i parametri di comfort e tenuta di strada sono intrinsecamente in contrasto tra loro e sarà quindi necessario effettuare una scelta di compromesso tra i due. Prendiamo, ad esempio, in esame un veicolo con sospensioni particolarmente “morbide”: queste saranno in grado di deformarsi molto velocemente e quindi di assorbire qualsiasi asperità della strada. Per contro però un ammortizzatore molto “morbido” farà perdere facilmente il contatto tra ruota e asfalto diminuendo l’aderenza del veicolo, rendendolo praticamente inguidabile. Al contrario irrigidendo eccessivamente le sospensioni si avrà un’ottima tenuta di strada a scapito dell’isolamento dal terreno, cioè a scapito del comfort di guida.
Per tale ragione sono state sviluppate le sospensioni attive e semi‐attive che permettono, utilizzando opportuni algoritmi di controllo, di migliorare allo stesso tempo sia il comfort e sia la tenuta di strada rispetto a quelle passive.