Capitolo 1
Il progetto “SPADA”
Introduzione
Le tre applicazioni astronomiche a cui si è fatto cenno nell’introduzione sono già state realizzate in altri contesti e con altre tecnologie, tuttavia il punto di forza del progetto, ribattezzato “progetto SPADA” (Single Photon Avalanche Diode Array), è l’innovazione introdotta dai sensori i quali presentano prestazioni superiori in termini di dissipazione di potenza e di sensibilità sia rispetto ai PMT (Photo Multiplier Tube), la tecnologia maggiormente utilizzata nell’ambito della rivelazione della radiazione luminosa, che rispetto a sensori basati su tecnologia CCD (Charge Coupled Device).
Nei prossimi paragrafi si illustreranno più nel dettaglio le tre applicazioni astronomiche, per comprendere meglio l’ambito utilizzo del sensore SPADA. In seguito verranno discusse le caratteristiche generali dei sensori SPAD evidenziando le peculiarità dei rivelatori progettati presso il Politecnico di Milano. Infine si esporranno le specifiche del progetto SPADA, ovvero come le tre applicazioni sopraccitate verranno messe in opera dai diversi gruppi di lavoro, incentrando l’attenzione sulla parte affidata all’Università di Pisa.
1.1 Le tre applicazioni astronomiche
1.1.1 Fast Transient Imaging – FTI
Come accennato nell’introduzione, l’applicazione FTI ha come scopo la rilevazione di eventi astronomici caratterizzati da veloci transitori. Fenomeni con queste caratteristiche sono ad esempio le esplosioni di supernovae o gli impulsi luminosi ad alta frequenza provenienti dalle pulsar.
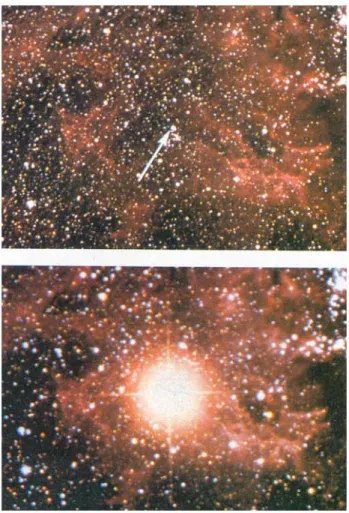
Una supernova non è altro che lo stadio finale di vita di una stella caratterizzato dall’esplosione della stessa. La nebulosa del Granchio ad esempio si è formata proprio a seguito dell’esplosione della supernova del 1054. Un fenomeno come quello delle supernovae è caratterizzato dallo sprigionamento in poche ore di una immensa quantità di energia (superiore a 1026 megatoni) che è possibile apprezzare anche a molti anni
luce di distanza sottoforma di radiazione luminosa.
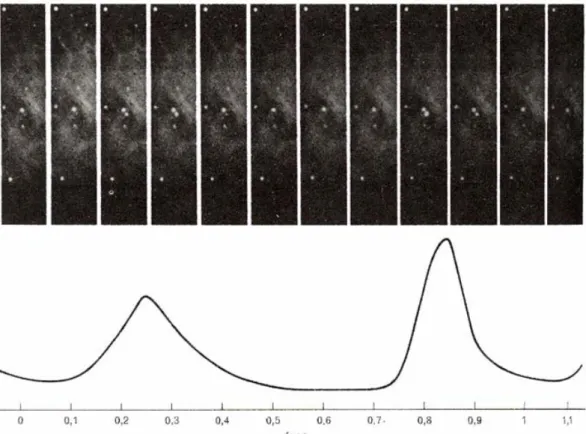
Le pulsar sono corpi celesti in grado di emettere impulsi radio a intervalli fissi. Un esempio è la stella di Baade, dal nome dell’astronomo W.Baade autore della sua scoperta nel 1969, localizzata all’interno della nebulosa del Granchio. Tale stella emette 30 impulsi luminosi al secondo. Tra un lampo e l’altro è oscura, invisibile, anche col più grande telescopio del mondo.
Figura 1.2: Oscillazioni di luminosità della “Stella di Baade”
Appare evidente che lo studio di questi fenomeni richieda l’utilizzo di mezzi di osservazione astronomica estremamente sensibili in grado di rilevare i repentini picchi di energia dovuti alle supernovae o i guizzi di luce provenienti dalle pulsar. Un mezzo utile allo scopo è costituito proprio dalle tecniche di Fast Transient Imaging. Esempi di applicazioni FTI si ritrovano ad esempio presso l’osservatorio di Asiago dove, con un
(Intensify Charge Coupled Device) si è raggiunta una risoluzione spaziale di 25 µm FWHM (Full Width at Half Maximum). Altro esempio può essere il sistema OPTIMA ( Optical Pulsar Timing Analyser ), sviluppato da un gruppo di ricercatori spagnoli e tedeschi, che utilizza come contatori di fotoni una matrice di otto sensori basati su fotodiodi a valanga di vecchia generazione e una camera a CCD per assicurare il corretto posizionamento del telescopio. Il risultato ottenuto con OPTIMA è stato la misura del ciclo rotazionale di una pulsar con un errore di fase di 112 µs in una finestra di osservazione di oltre 80 ore. Per ulteriori dettagli si rimanda alla bibliografia ([A1]).
1.1.2 Ottica adattiva – AO
Come accennato nell’introduzione i sistemi di ottica adattiva sono sistemi retroattivi per la correzione delle distorsioni presenti nei fronti d’onda luminosi che incidono su un telescopio terrestre dovute alla presenza del mezzo atmosferico. L’immagine ottenuta con un telescopio terrestre risulta infatti poco netta, ed è difficile avvertire con chiarezza un qualche movimento erratico del corpo celeste che appare come un oggetto i cui contorni cambiano in continuazione. La prima e più immediata soluzione è costituita dai telescopi orbitanti, come Hubble. Tuttavia i progressi nella tecnologia del controllo della luce laser hanno consentito di realizzare dispositivi, a terra, che permettono di misurare la distorsione dell’immagine prodotta nel passaggio della luce degli oggetti celesti attraverso l’atmosfera e di introdurre, all’interno del telescopio ed in tempo reale, una distorsione uguale ed opposta, in modo da formare finalmente un’immagine chiara e nitida. Questa tecnica prende il nome di ottica adattiva e consiste nell’introduzione nel cammino ottico del fronte d’onda di una distorsione uguale e contraria a quella introdotta dal mezzo atmosferico in modo da ottenere una immagine nitida. Per raggiungere tale scopo si fa spesso uso di specchi deformabili tramite attuatori piezoelettrici con rapidi tempi di risposta oppure di lamine metalliche
elettrostrittive. Per poter correggere l’aberrazione tramite la distorsione introdotta dallo specchio deformabile, è però necessario compiere una preventiva osservazione di una stella sufficientemente brillante (detta stella guida) per valutare l’errore da compensare. La stella guida deve essere luminosa e molto prossima all’oggetto che si vuole puntare. Se nell’intorno dell’obiettivo non si hanno oggetti sufficientemente luminosi da utilizzare come riferimento è necessaria la creazione di un riferimento artificiale, mediante l’uso di un raggio laser puntato verso la porzione di cielo che si desidera osservare.
Figura 1.5. Possibile architettura di un sistema di ottica adattiva.
Attualmente esempi di sistemi di ottica adattiva si possono ritrovare nell’osservatorio astronomico di W.M.Keck sulle isole Hawaii e nel sistema MACAO-VLTI (Multi-Application Curvature Adaptive Optics and Very Large Telescope Interferometry) installato su uno dei quattro
Figura 1.6 Il telescopio dell’osservatorio W. M. Keck situato a 4000 metri sul livello del mare sulla sommità del vulcano dormiente Mauna Kea nelle Hawaii durante il primo esperimento di stella guida laser nel dicembre 2001 .
Figure 1.7 Immagini di Nettuno dal telescopio Keck. a) L’immagine mostra bande che circondano il pianeta che sembrano essere nubi in rapido movimento. (b) La stessa immagine senza l’ottica adattiva .Vedi anche bibliografia [10].
1.1.3 Layer sensing - LS
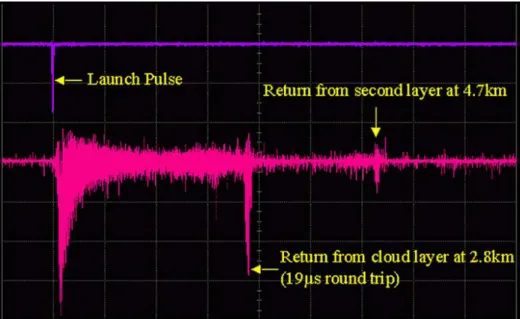
Obbiettivo di questa terza applicazione è quello di studiare i vari strati dell’atmosfera terrestre analizzandone da terra le caratteristiche ottiche. Per poter fare ciò, ad intervalli regolari viene inviato verso il cielo un impulso laser. Esso percorre in meno di un millisecondo l’intera atmosfera, attraversandone i vari strati. Studiando in istanti successivi i fotoni di ritorno, si possono desumere le caratteristiche ottiche, e quindi anche fisiche, dei diversi strati atmosferici (o layers).
Questa applicazione nasce come lo sviluppo della tecnica delle stelle guida laser (anche dette LGS acronimo di laser guide stars) viste nel paragrafo precedente. In quel caso si trattava di emissioni di luce create dalla retro-dispersione di un impulso di luce laser a causa dell’eccitazione di atomi di sodio nell’alta mesosfera (a 90 Km di altitudine). Nel LS il laser viene sempre puntato al cielo vicino all’oggetto di interesse, ma la sua luce viene riflessa dalle molecole e particelle d’aria della bassa stratosfera tra i 10 e i 20 Km di quota, ottenendo in tal modo un altro tipo di stella artificiale nominata "Rayleigh guide star”; l’effetto è simile a quello di un proiettore ed appare come una macchia nel cielo. Esempi di applicazioni di Layer Sensig possono essere attualmente ritrovati negli esperimenti svolti presso l’installazione telescopica William Herschel sull’isola La Palma, nelle Canarie, da un team dipendente dall’inglese University of Durham. Per ulteriori dettagli si rimanda alla bibliografia ([A3]).
Figura 1.8: Esempio di applicazione LS: rilevamento di corpi nuvolosi negli strati atmosferici a seguito dell’invio degli impulsi laser.
1.2 Il sensore SPAD
Tale dispositivo trova numerose applicazioni in campi disparati come l’astronomia, il rilevamento di singole molecole, le misure di fluorescenza e luminosità, la caratterizzazione dei diodi laser, il testing delle fibre ottiche, la telemetria… In particolare, in campo astronomico, si usano tecniche di photon counting quando si vogliono effettuare misure accurate di segnali ottici deboli o di veloci impulsi luminosi, nel range dei nanosecondi o dei picosecondi.
Un sensore SPAD (Single Photon Avalanche Diode) è fondamentalmente una giunzione p-n polarizzata inversamente al di sopra della sua tensione di breakdown, al di sotto della quale si genera il cosiddetto fenomeno della “moltiplicazione a valanga dei portatori di carica”. Tale fenomeno è dovuto al fatto che, a causa del forte campo elettrico presente nel volume della zona di svuotamento di una giunzione p-n polarizzata in inversa, a seguito dell’iniezione o della generazione di un portatore di carica viene conferita allo stesso una forte accelerazione e quindi un’energia sufficiente a rompere i legami degli altri portatori all’interno del reticolo cristallino generando nuove coppie elettrone-lacuna. Di conseguenza si instaura un meccanismo a catena che si risolve nel passaggio di un intensa corrente attraverso il dispositivo e che, se non opportunamente bloccata, fa andare la giunzione in fuga termica, rendendola inutilizzabile.
Affinché una giunzione p-n polarizzata in inversa possa essere sfruttata per la rilevazione di un singolo fotone è necessario che il meccanismo del breakdown a valanga venga scatenato a seguito della perturbazione provocata dall’incidenza di una radiazione luminosa. Una volta innescato l’effetto catena un apposito circuito elettronico detto Active
Quenching Circuit deve invertire la polarizzazione del fotodiodo in modo
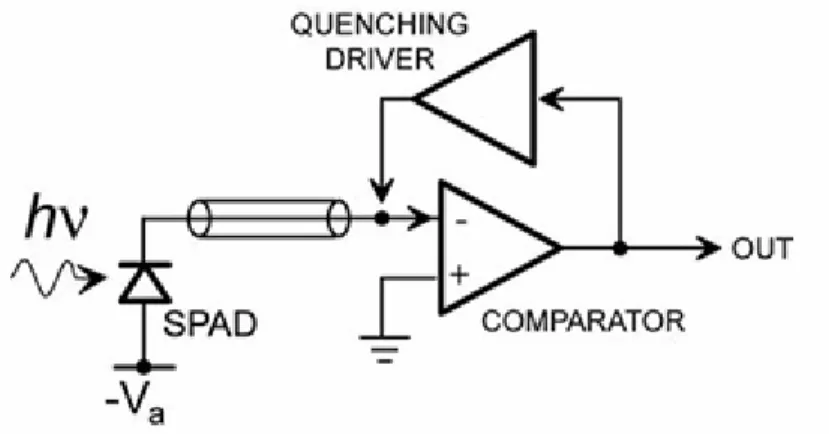
da evitare la fuga termica. Questo modo di operare con una giunzione viene comunemente chiamato modo Geiger per l'analogia con i rivelatori, Geiger appunto, di radiazioni ionizzanti e, a differenza del più comune modo di funzionamento lineare, consente di ottenere un'informazione di tipo digitale sul flusso luminoso. Infatti se due o più fotoni raggiungono contemporaneamente la zona attiva della giunzione e vengono assorbiti, l'impulso di valanga che si osserva, innanzitutto è unico e inoltre ha la stessa forma e ampiezza di un impulso causato dall'assorbimento di un solo fotone. Rispetto ai PMT, quindi, i diodi SPAD non consentono di ottenere un informazione di tipo proporzionale al numero di fotoni assorbiti in ogni istante. In modalità Geiger, dopo l’arrivo di un fotone il sensore non è sensibile a nuovi stimoli luminosi per un lasso temporale detto hold off time in cui il circuito di quenching riporta la giunzione allo stato iniziale.
Figura 1.10: Schema a blocchi di un sensore SPAD con circuito di Active Quenching
1.2.1 Efficienza quantica
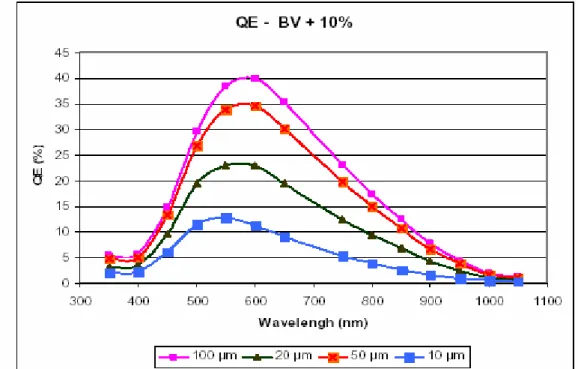
L’indicatore fondamentale delle prestazioni di un sensore SPAD è la cosiddetta efficienza quantica. Si tratta di un parametro espresso in termini percentuali e indicativo delle prestazioni di rilevazione del sensore in termini di numero di fotoni rilevati sul numero totale di fotoni incidenti. E’ ovviamente dipendente dalla lunghezza d’onda della radiazione incidente, dall’area attiva del dispositivo e dalla tensione di bias applicata all’anodo del diodo.
Figura 1.11 Andamento dell’efficienza quantica in funzione della lunghezza d’onda della radiazione incidente e dell’area attiva ad una tensione di alimentazione superiore del 10% della tensione di breakdown di un sensore SPAD.
1.2.2 FWHM
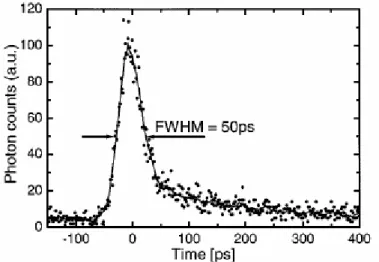
Altro parametro di merito è il FWHM (Full Width at Half Maximum) ovvero la media statistica del ritardo tra l’assorbimento di un fotone e il fronte di corrente in uscita. Questo parametro è indicatore della risoluzione temporale del sensore ed fortemente dipendente dalla lunghezza d’onda della radiazione incidente sul sensore, in quanto il coefficiente di assorbimento dipende dalla lunghezza d’onda, nonché dalla grandezza dell’area attiva del sensore stesso e dalla differenza tra la tensione di breakdown e la tensione a cui è mantenuto il sensore. Ordini di grandezza del FWHM sono le decine di picosecondi.
Figura 1.12: misura del FWHM per un sensore SPAD
1.2.3 Dark Counts
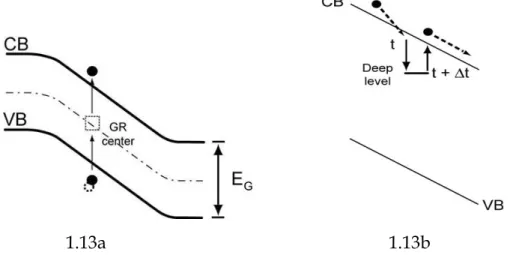
Altro importante parametro è il numero dei dark counts, i conteggi di buio. Si tratta di inneschi indesiderati del breakdown a valanga dovuti non all’incidenza di un fotone bensì a cause di natura diversa e che possono essere di due tipi. La prima causa dei conteggi di buio è la generazione termica dei portatori di carica, ovvero il cosiddetto “rumore G-R”. E’ la principale fonte di rumore del sensore ed è importante che venga minimizzata, con accorgimenti sul raffreddamento del dispositivo tramite ad esempio termocoppie ad effetto Peltier. Il secondo fattore che
concorre all’esistenza dei dark counts è il fatto che durante il fenomeno del breakdown alcuni portatori di carica restano intrappolati in difettosità presenti nella regione di svuotamento e vengono liberati, generando una nuova valanga e di conseguenza un rilevamento errato, una volta riportato il dispositivo nello stato iniziale. A tale scopo il circuito di quenching può essere progettato in modo da rendere l’intervallo di hold off sufficientemente lungo in modo da far sì che i portatori intrappolati si liberino senza causare una nuova valanga, tuttavia in questo modo si limita fortemente la massima frequenza di rilevazione dei fotoni. Si noti che la tecnica di raffreddare il sensore per ridurre i dark counts dovuti al rumore G-R ha come effetto collaterale l’aumento dei dark counts dovuti alla seconda causa in quanto la diminuzione di temperatura aumenta i tempi rilascio medi dei portatori intrappolati. Il processo di fabbricazione di questi sensori deve quindi essere caratterizzato da una soluzione di compromesso.
1.13a 1.13b
Figure 1.13a e 1.13b: cause del fenomeno dei dark counts. 1.13a: centri di generazione-ricombinazione dei portatori di carica nella zona di svuotamento. 1.13b: intrappolamento di un portatore nei livelli energetici profondi.
1.2.4 Slow Tail
Come ultimo fattore di merito di un sensore SPAD possiamo evidenziare la durata della coda (tail) alla fine dell’impulso di corrente. Tale fattore è indicativo del tempo impiegato dalla giunzione per riportarsi nella condizione in cui si attende l’arrivo di un nuovo fotone. Una coda troppo lenta comporta il rischio di perdere possibili conteggi in quanto eventuali impulsi di corrente sono mascherati.
Figura 1.14: Effetto della presenza della coda lenta dopo il rilevamento di un fotone. Le frecce 1 e 2 indicano effetti del secondo ordine che non vengono rilevati da un sensore con un difetto di questo tipo.
1.2.5 SPAD e array di SPAD
I sensori SPAD attualmente in commercio sono sviluppati unicamente da Perkin-Elmer Optoelectronics Canada. Questi dispositivi sono oggetti delicati il cui processo di fabbricazione non è compatibile con i processi di fabbricazione industriali di circuiti integrati e si prestano pertanto difficilmente alla produzione su larga scala. Essi necessitano inoltre di alte tensioni di polarizzazione (300-400V) e mostrano consumi di potenza decisamente alti (potenza di picco pari circa a 8W; energia dissipata per impulso pari circa a 10nJ). Essi vengono distribuiti in moduli in cui è fornita anche la circuiteria di quenching descritta precedentemente. I dispositivi progettati e realizzati presso il Politecnico di Milano presentano d’altra parte la caratteristica di poter lavorare a tensioni decisamente inferiori (60V) e di essere compatibili con i tradizionali processi di fabbricazione di circuiti integrati in tecnologia CMOS. Le dimensioni di questi dispositivi sono estremamente ridotte con diametri delle aree attive che variano da 10µm a 40µm. La risoluzione temporale è individuata da un FWHM pari a 45ps e presentano una efficienza quantica che varia dal 4% al 45% in funzione della lunghezza d’onda e della tensione di polarizzazione (la massima efficienza si ottiene in corrispondenza di una lunghezza d’onda pari a 600nm). Per quanto riguarda i dark counts il massimo numero di conteggi di buio è pari a 10Kcps.
Il circuito di AQC realizzato per il controllo del sensore è un circuito completamente integrato e pertanto è stato nominato iAQC (integrated Active Quenching Circuit). In questo modo si aumentano affidabilità e velocità e inoltre si riduce il numero dei componenti discreti e quindi l’ingombro del sistema. Restano al di fuori dell’integrato solo i componenti sottoposti a tensioni più elevate.
Figura 1.15: Schema a blocchi e utilizzo di un iAQC. Il segnale di gate permette, se opportunamente pilotato, di portare la tensione di anodo dello SPAD alla tensione di quench Vquench, mantenendo il sensore in uno stato di insensibilità ad eventuali fotoni.
Le ridotte dimensioni del sensore hanno permesso di pensare ad una struttura più complessa per il rilevamento di radiazioni luminose, arrivando a concepire una matrice di sensori SPAD ovvero uno SPADA (Single Photon Avalanche Diode Array). La presenza di più SPAD affiancati tra loro in uno stesso circuito integrato introduce tuttavia un altro tipo di problematica, ovvero il cosiddetto crosstalk. Questo è causato da effetti di Bremstrahlung, ossia dal fatto che i portatori che costituiscono la corrente durante la valanga emettono a loro volta fotoni i quali possono scatenare il breakdown a valanga anche nelle giunzioni adiacenti. Inoltre c’è il rischio che alcuni portatori generati in una giunzione diffondano nella giunzione limitrofa scatenando la valanga anche in essa. Un accorgimento per limitare tale effetto, che va a sommarsi alle cause intrinseche di dark counts nel dispositivo SPAD esposte precedentemente, è quello di cercare di isolare otticamente e elettricamente il più possibile
ogni dispositivo dell’array tramite la diffusione di appositi anelli di guardia e mantenere sensori adiacenti distanti il più possibile.
Figura 1.16: Effetto del crosstalk sui dark counts in funzione della distanza del sensore sotto misura da un sensore illuminato e della corrente che lo attraversa
In figura 1.17a si può osservare la struttura del sensore completo, costituito da una matrice di 60 SPAD. In realtà ad ogni pixel corrispondono quattro sensori con diverse dimensioni delle aree attive, come si vede in figura 1.17b. Vista la dipendenza delle prestazioni di un sensore SPAD dalla dimensione dell’area attiva e dalla lunghezza d’onda della radiazione incidente, appare ovvio che la possibilità di avere sullo stesso chip SPAD con aree attive diverse, rende l’intero sensore capace di avere buone prestazioni su un range di lunghezze d’onda più ampio.
1.17a 1.17b
Figure 1.17a e 1.17b: Struttura di un sensore SPADA. 1.17a: Array di 60 pixel costituente l’intero sensore. 1.17b: Schematizzazione del singolo pixel.
Il supporto per il chip SPADA consiste di un substrato ceramico 50mm x 50mm con piste metalliche e pin divise in 4 linee di 20 pin ciascuna, che è posto a stretto contatto con un dito freddo Peltier di area 20mm x 20mm. In questo modo si riesce a mantenere costante la temperatura del chip, controllando così anche la costanza del rendimento dei sensori ed il numero di conteggi di buio.
Figura 1.18: Chip istallato su supporto ceramico in contatto con lo stadio di Peltier.
Un’ottica dedicata, costituita da una microlente seguita da una microsfera, focalizza il fronte d’onda incidente su ogni singolo sensore SPAD. La distanza tra le microsfere e la superficie dello SPADA è di circa 66 µm. Per approfondimenti sui sensori SPAD e sugli array di SPAD si rimanda alla bibliografia ([B]).
1.3 Le specifiche del progetto SPADA
In questo paragrafo si illustreranno le specifiche di progetto seguite per la realizzazione del sistema elettronico proposto per la realizzazione delle tre applicazioni viste. La matrice di 60 sensori, con i relativi iAQC, illustrata nel paragrafo precedente è montata su una scheda, nominata
Detection Board, che ospita, oltre ai sensori, anche un microcontrollore per
la comunicazione di informazioni quali la temperatura dei sensori, il valore della tensione di anodo degli SPAD e il tempo di hold off tramite una interfaccia seriale RS-232. Dalla Detection Board escono inoltre due cavi SCSI a 68 pin per l’invio all’elettronica a monte dei segnali in uscita dagli iAQC.
Figura 1.19: Architettura del sistema SPADA.
Il compito assegnato al gruppo di lavoro dell’Università di Pisa nell’ambito del progetto SPADA è quello della progettazione e realizzazione dell’hardware e del software per l’elaborazione dei segnali
Data-Processing electronic e il software per l’acquisizione e la
visualizzazione dei risultati.
Verranno illustrate ora le azioni che il sistema elettronico dovrà svolgere per ognuna delle tre applicazioni astronomiche
1.3.1 Fast Transient Imaging
Nell’applicazione di Fast Transient Imaging (FTI) l’importante è acquisire l’immagine a 60 pixel fornita dal sensore SPADA ogni finestra di integrazione temporale Tw, di durata impostabile dall’utente in un range tra 10 µs e 100 ms con una risoluzione di 14 bit. Finestre temporali brevi permettono una scansione temporale del flusso di fotoni incidente con risoluzione più che sufficiente per la maggior parte delle applicazioni astronomiche. L’immagine deve visualizzare il numero di fotoni rilevati da ciascun pixel e contati dalla scheda nella finestra temporale; quindi ogni periodo Tw i 60 conteggi effettuati devono essere trasmessi al computer remoto.
In figura 1.19 è illustrato il diagramma a blocchi della scheda di data-processing configurata per l’applicazione FTI.
P o w er-su p p ly 1st C o u n ter L a tc h C k E n a b le T im in g an d c o n tro l lo g ic M a in s 2 3 0 V a c
(F A S T IM A G IN G )
SC SI co nn ec to r 68 p in SC SI co nn ec to r 68 pi n C k S h ift R e g iste r d iff . G a te I n d iff . G a te O u t d iff . I n te r lo c k fro m D at a-P ro ce si ng E le ct ron ic s U S B d iff . 6 0th C o u n te r L a tc h C k E n a b le C k S h ift R e g iste r E n a b le D a ta B u s D a ta sh if tc lo ckFigura 1.19: Schema a blocchi della Data Processing Board configurata per l’applicazione FTI.
Ogni contatore deve avere una profondità almeno di 16 bit e implementare un meccanismo di saturazione che scatta quando si verifica un overflow sul contatore (il conteggio giunge a FFFF esadecimale). In questo modo, al massimo counting rate di 20 Mcps, corrispondente al minimo hold-off time di 50 ns permesso dagli iAQC, ogni contatore potrà saturare solo per Tw maggiori di 3.3 ms. In questa situazione, l’operatore potrà decidere di ridurre la finestra di integrazione, migliorando così anche le performance dell’acquisizione rispetto alla scansione temporale. Inoltre, si nota che per Tw minori di 1 ms ogni contatore non avrà mai bisogno di più di 15 bit, mentre per la finestra minima (Tw=10 µs) saranno
remoto può essere adattato all’effettivo numero di bit dei contatori secondo la formula:
neff = log2(Tw.20 Mcps).
Una logica di timing e controllo salva il contenuto di ogni contatore in un corrispondente registro di appoggio ogni finestra di integrazione, in questo modo nessun fotone verrà perduto dal conteggio. Il contenuto dei 60 registri di appoggio viene passato all’uscita tramite un opportuno collegamento scelto in base al massimo bit rate necessario per l’elaborazione in tempo reale. Questo corrisponde alla finestra di integrazione minore, ciò significa nel nostro caso la necessità di una banda di uscita pari almeno a:
Fmax = 60 pixel . 16 bit / 10 µs = 96 Mbps.
Questo alto valore giustifica pienamente la scelta della veloce connessione Firewire verso il computer remoto. Lo stesso collegamento Firewire verrà usato per scaricare i parametri impostabili dall’utente verso la scheda; questi sono:
• la finestra di integrazione temporale Tw,
• il Gate e l’Interlock software, che permettono all’utente di accendere o spegnere gli iACQ o l’intero sensore SPADA (attraverso la Detection Board) per mezzo del computer remoto, • l’attivazione del “safety mode”, modalità che consente la
generazione di un Interlock hardware e l’invio di un messaggio di errore al computer remoto nel caso in cui i contatori saturino.
Vi sarà poi anche una possibilità di Gate hardware, con ingresso fornito da apparecchiature esterne e uscita verso la Detection Board. Inoltre la scheda dovrà effettuare il by-pass dei comandi indirizzati alla Detection Board e delle letture dei valori attuali di alcune variabili (temperatura, over-voltage, tempi di hold-off) tramite porta seriale RS-232.
1.3.2 Adaptive Optics
Nelle applicazioni di ottica adattiva un sistema di curvatura del fronte d’onda detto Curvature WaveFront System (CWFS) deve compiere parecchie azioni: la figura 1.20 ne schematizza il principio operativo.
Timing and control logic USB Processing: A-B A+B Audio ampl. Output GND sinusoidal waveform In pu t W av eF ront SPADA pixel moving membrane loudspeaker in f ocu s be fore f oc us be hi nd f oc us A B A B
Figura 1.20: principio operativo del sensore di curvatura.
Innanzitutto, tramite il movimento di una membrana, si deve cambiare il piano focale del flusso di fotoni incidente sopra il sensore SPADA, in modo che acquisti un’oscillazione sinusoidale. In questo modo si può procedere a contare per ogni pixel, in un contatore A, il numero di fotoni rilevati quando il piano focale si trova al di sopra del sensore SPADA e in un contatore B il numero di fotoni rilevato quando il piano focale è al di sotto del sensore. La misura deve essere ripetuta per un numero intero di periodi di oscillazione, sommando ogni volta ai nuovi conteggi quelli precedenti.
In uscita bisogna fornire o i conteggi accumulati nei contatori A e B o il segnale di curvatura definito come
C = (A-B)/(A+B)
Un valore di C basso in modulo indica che i pixel dello SPADA
pixel sono fuori fuoco, e che quindi il sistema di ottica adattiva deve correggere la focalizzazione. L’acquisizione del segnale di curvatura va ripetuta in tempo reale.
La membrana è mossa da un altoparlante caratterizzato da una resistenza di 4Ω ed una potenza di 4W. La frequenza dell’oscillazione sinusoidale è programmabile dall’utente tra 1.5 kHz e 3 kHz, con una risoluzione di 1 Hz, poiché la membrana risuona con un fattore Q molto elevato. Anche fase ed ampiezza della sinusoide sono impostabili dall’utente: in particolare la risoluzione sull’ampiezza sarà di 8 bit, quella sulla fase di 0.5°.
La logica di controllo deve alternativamente abilitare i contatori corrispondenti ai semiperiodi A e B, continuando a contare per un numero intero di periodi della sinusoide, impostabile dall’operatore nel range tra 1 e 256. Ne consegue che l’intero intervallo di conteggio sarà compreso tra un minimo di 1/3 kHz = 333 µs ed un massimo di 256/1.5 kHz = 171 ms. Come per l’applicazione FTI, sono utilizzabili contatori almeno a 16 bit, ed anche la logica aritmetica che calcolerà il segnale di curvatura dovrà fornire un risultato su 16 bit.
Uno schema di principio della Data-Processing Board configurata per Ottica Adattiva è mostrato in figura 1.21.
Power-supply
1
stA counter
Ck EnableTiming and
control logic
Mains 230V ac(ADAPTIVE OPTICS)
SC SI c on ne ct or 68 pi n SC SI co nn ec to r 68 pi n Shift Register diff. Gate In diff. Gate Out diff. Inter lockfr
om
D
ata
-P
ro
ce
si
ng
El
ec
tr
on
ic
s
USB diff.Enable Data Bus Data shiftclock
Processing:
A-B
A+B
Audio ampl.Load
4Ω 4W
Output GND Sin. Out Multiplying DAC DAC VREF 8bit 16bit sine table sine peak1
stB counter
Ck EnableFigura 1.21: Schema a blocchi della Data Processing Board configurata per l’applicazione AO.
Alla fine di ogni intervallo di acquisizione, la Data-Processing Board esegue la trasmissione al PC remoto dei 60 segnali di curvatura calcolati, ed eventualmente anche dei contenuti dei singoli registri A e B. Quindi la massima banda necessaria in uscita per questa applicazione risulta essere:
Fmax = 3 data . 60 pixels . 16 bit / 333 µs ≈ 10 Mbps
FIREWIRE
Generazione della sinusoide.
Anche in questo caso è la connessione Firewire a provvedere all’upload dei dati ed al download dei parametri impostabili dall’utente verso la scheda che in questa applicazione sono:
• frequenza ampiezza e fase della sinusoide,
• il numero si periodi di sinusoide su cui fare l’acquisizione, • il Gate e l’Interlock software e l’attivazione del “safety mode”. La gestione dei segnali di Gate, Interlock e “safety mode” è la stessa dell’applicazione FTI. Inoltre anche in questa applicazione la scheda effettuerà il by-pass dei comandi indirizzati alla Detection Board (temperatura, over-voltage, tempi di hold-off) via porta seriale RS-232.
1.3.3 Layer Sensing
Questa applicazione operativamente risulta un misto tra le precedenti, ma lo scopo questa volta è lo studio degli strati atmosferici per mezzo dell’analisi delle riflessioni a diverse quote, in seguito all’invio di un impulso laser.
La scheda riceve un segnale di sincronizzazione (con frequenza di ripetizione di 7 kHz), che segnala l’invio dell’impulso laser e mantiene il sensore SPADA spento tramite il Gate per i successivi 2.5 µs (per mascherare la fluorescenza ottica dovuta all’elevata potenza dell’impulso). Trascorso questo tempo fissato, la scheda riaccende il sensore e inizia a memorizzare, per ciascuno dei 60 pixel, i conteggi dei fotoni che arrivano in 15 finestre temporali successive. L’acquisizione ora descritta viene ripetuta per un numero di volte definibile dall’utente.
Tutti i dati acquisiti verranno salvati e poi trasmessi al computer remoto alla fine del processo, solo allora si potrà iniziare una nuova serie di acquisizioni.
Nello stesso tempo, per ottenere una corretta focalizzazione, la scheda genera un segnale sinusoidale, con le stesse specifiche viste nel paragrafo precedente.
Ancora è la connessione Firewire a provvedere all’upload dei dati ed al download delle impostazioni della scheda che in questa applicazione sono:
• frequenza, ampiezza e fase della sinusoide, • il numero di acquisizioni,
• il Gate e l’Interlock software e l’attivazione del “safety mode”. La gestione dei segnali di Gate, Interlock e “safety mode” è svolta come nelle applicazioni precedenti. Inoltre anche in questa applicazione la scheda effettuerà il by-pass dei comandi indirizzati alla Detection Board (temperatura, over-voltage, tempi di hold-off) via porta seriale RS-232. La struttura della Data Processing Board configurata per l’applicazione di Layer Sensing è mostrata nella figura 1.22.
Power-supply 1st pixel sample 1 Ck Enable Mains 230V ac
(LAYER SENSING)
SC SI co nn ecto r 68 pi n SC SI co nn ecto r 68 pi n Shift Register diff. Gate In diff. Gate Out diff. Inter lock fr om D ata -P ro ce si ng El ec tr on ic s USB diff. Sampleselect Data Bus Data shiftclock
Uploading unit Audio ampl. Load 4Ω 4W Output GND Sin. Out Multiplying DAC DAC VREF 8bit 16bit sine table sine peak 1st pixel sample 15 Ck Enable Timing and control logic
Figura 1.22: Schema a blocchi della Data Processing Board configurata per l’applicazione LS.
La corretta sincronizzazione tra il laser, la generazione della sinusoide e l’inizio della acquisizione garantisce il campionamento del raggio laser su differenti altezze con una risoluzione di 3.3 Km su un range di strati atmosferici da 1 a 50. Genera-zione Della Sinusoide FIREWIRE