57
4
MISURA DELLA SPINTA
4.1 Introduzione
In questo capitolo dopo aver descritto la procedura di calibrazione del trasduttore di spostamento, e dopo una descrizione del sistema di bloccaggio magnetico della bilancia di spinta, verranno spiegati i metodi utilizzati per ricavare la misura della spinta del propulsore.
4.2 Calibrazione statica del trasduttore di spostamento
4.2.1 Procedura di calibrazione
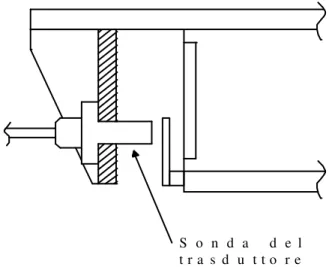
Nella bilancia di spinta il trasduttore di spostamento Proximitor è posto sulla parte fissa della bilancia stessa(vedi figura 4.1), e misura lo spostamento del bersaglio solidale alla parte mobile.
Il trasduttore è un Proximitor Bentley Nevada 3300XL alimentato a 24 Volt e il suo funzionamento si basa sulla generazione di correnti parassite: la sonda manda un segnale in radiofrequenza verso il bersaglio metallico che, a causa delle correnti parassite che vi si generano, dissipa una certa energia, valutata opportunamente dal proximitor demodulando il segnale di ritorno dalla sonda.
La calibrazione statica è stata effettuata, imponendo uno spostamento noto, alla parte mobile della bilancia ed acquisendo il segnale di uscita.
58
La misura dello spostamento è stata fatta mediante una vite micrometrica anch’essa solidale alla parte fissa della bilancia e permette la lettura diretta di 1/100 di mm
S o n d a d e l t r a s d u t t o r e
Fig. 4.1 Posizione del proximitor
4.2.2 Calibrazione
Partendo da una distanza Proximitor-Bersaglio pari a 0.8 mm, abbiamo allontanato il bersaglio dal Proximitor di una quantità nota e abbiamo acquisito il segnale in uscita in Volt.
Abbiamo ripetuto il procedimento eseguendo 3 serie di letture, ciascuna costituita da 8 punti per un totale di 24 letture.
Alla fine abbiamo ottenuto una serie di dati segnale proximitor-distanza che sono ben interpolati da una retta.
In figura 4.2 è riportata la retta di calibrazione del proximitor
59
Fig.4.2 Retta di Calibrazione del proximitor
L’ espressione della retta di interpolazione per la calibrazione del proximitor è data da:
Υ =
(
−7,6937⋅Χ)
−11.096 dove :Y = è il segnale in Volt del Proximitor
X = è la distanza Proximitor – Bersaglio in mm.
(4.1) mm y = -7,693x - 11,09 R² = 0,994 -24 -23 -22 -21 -20 -19 -18 -17 -16 -15 -14 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 segnale distanza prox-bersaglio Retta di Calibrazione del Proximitor
Segnale Proximitor [V] Lineare (Segnale Proximitor [V])
60
4.3 Dinamica della Bilancia di Spinta
Come già detto nel capitolo 4, la bilancia di spinta è schematizzabile come un quadrilatero articolato al quale è preclusa la libertà di rotazione; essa, quindi, essenzialmente si comporta come un doppio pendolo.
L’equazione del moto generale di un tale sistema massa-molla-smorzatore si può scrivere come:
)
t
(
F
)
t
(
x
R
g
m
k
)
t
(
x
h
)
t
(
x
m
⋅
+
⋅
+
+
⋅
⋅
=
(4.2) dove:o m è la massa dell’apparato mobile
o h tiene conto dell’effetto smorzante dovuto principalmente all’isteresi delle lamelle durante la loro flessione
o k è la costante elastica relativa alle lamelle di bronzo fosforoso
o mg/R, valido per piccole oscillazioni, tiene conto del richiamo
elastico equivalente della massa m (R è la distanza tra la cerniera superiore ed il baricentro dell’apparato mobile).
F(t) m·x h·x (k+mg/R)x .. . x
61 Non essendoci nessuno smorzatore che agisca sull’apparato mobile, la prima approssimazione che è possibile fare, nell’ipotesi di piccole
oscillazioni, è quella di trascurare il termine smorzante, sicuramente piccolo rispetto agli altri termini nella (4.2).
L’equazione della massa mobile può essere quindi semplificata:
) t ( F ) t ( x K ) t ( x m⋅ + ⋅′ = avendo posto: R g m k K′= + ⋅
La (4.3) rappresenta la semplice equazione di un sistema massa-molla equivalente che, con ottima approssimazione, rappresenta il moto reale dell’apparato oscillante, e sarà la base di partenza per il calcolo della spinta del propulsore trattata nei prossimi paragrafi.
In particolare, la pulsazione propria del sistema oscillante è pari a:
m K n ′ =
ω
la frequenza propria del sistema viene semplicemente calcolata come:
π ω ν ⋅ = 2 n (4.3) (4.4) (4.5) (4.6)
62
4.4 La misura di spinta senza blocco della bilancia
La misura della spinta viene effettuata in maniera indiretta attraverso la misurazione, negli istanti immediatamente successivi allo sparo, dello spostamento dell’equipaggiamento mobile, costituito dal motore e dalla parte oscillante della bilancia di spinta.
La rilevazione di tale misura avviene tramite un apposito trasduttore di posizione, (proximitor) e quindi trasmesso ad un oscilloscopio.
Di seguito approfondiremo le leggi che stanno alla base del funzionamento dell’intero apparato di misura con l’intento di stabilire le basi per il calcolo della spinta del propulsore.
Per una descrizione sintetica e uno schema costruttivo della bilancia di spinta si veda il capitolo 5.
4.4.1 Elaborazione del segnale del proximitor.
La tecnica di misura della spinta di un motore MPD tramite la
conoscenza dello spostamento della massa mobile si basa su una procedura già utilizzata al Centrospazio durante prove analoghe condotte sul motore HPT.
L’ipotesi che sta alla base di tale tecnica è quella di sparo impulsivo, per cui si riesce a risalire alla variazione di velocità tra l'istante prima e quello subito dopo lo sparo, e da questa si ottiene l’informazione sull’impulso di spinta.
L’ipotesi di impulsività è giustificata dal fatto che il periodo di oscillazione della bilancia è sufficientemente più grande del tempo di applicazione della forzante.
La procedura adoperata consente di calcolare la spinta prodotta sia durante i cosiddetti spari caldi sia nel caso degli spari freddi.
Con il termine sparo caldo si intende il normale funzionamento pulsato del motore, con immissione di propellente e innesco della scarica;
sparo freddo si riferisce invece alla condizione in cui viene solamente
immesso il propellente all’interno della camera di accelerazione, senza innescare la scarica.
La conoscenza dello sparo freddo ci permette di calcolare il contributo della spinta fredda durante lo sparo caldo.
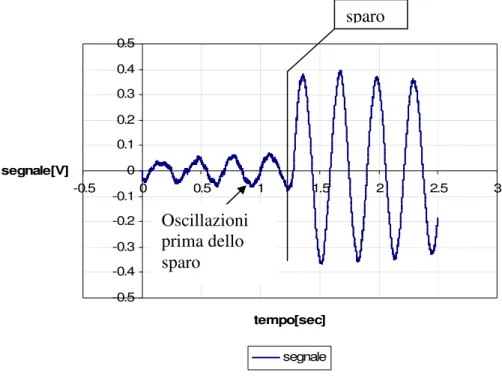
63 In figura 4.4 si riporta un tipico segnale del trasduttore di spostamento durante uno sparo del motore.
Fig. 4.4 Esempio di segnale del proximitor.
Come si può notare, prima dello sparo, il sistema è sottoposto a oscillazioni con ampiezza dell’ordine dei centesimi di millimetro causate dalle vibrazioni del basamento della camera di prova dovute alle normali attività di laboratorio.
Questo comporta che la velocità della massa mobile prima dello sparo, in generale, sarà diversa da zero.
La procedura seguita per ricavare la spinta da un grafico come quello di figura 4.4 si può riassumere nei seguenti punti :
o Applicando la trasformata di Fourier al segnale si ricava la frequenza di oscillazione del sistema e quindi la pulsazione propria;
o Dalla 4.5, nota la massa mobile, si ricava la costante elastica K’;
o Dal segnale del proximitor si ricava la distanza dalla posizione imperturbata e la velocità subito prima dello sparo;
o Sempre dal segnale del proximitor si ricava la massima ampiezza dell’oscillazione durante la prima semionda dopo lo sparo;
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 -0.5 0 0.5 1 1.5 2 2.5 3 tempo[sec] segnale[V] segnale Oscillazioni prima dello sparo sparo
64
o Utilizzando, come descritto di seguito, i dati sperimentali così ottenuti e conoscendo il tempo di applicazione della forza costante
F, si riesce a ricavare il valore della spinta.
Da un punto di vista matematico l’equazione del moto è la (4.3) con
≥
<
≤
=
*
0
*
0
)
(
t
t
se
t
t
se
F
t
F
(4.7)essendo F il valore costante della spinta e t* il tempo di applicazione della forza. Le condizioni iniziali del problema sono
=
=
0 0)
0
(
)
0
(
x
x
x
x
(4.8)essendo x0 e x rispettivamente lo spostamento e la velocità della massa 0
mobile all’istante dello sparo, entrambi ricavati dal segnale del trasduttore di spostamento.
La soluzione generale della (4.3) è esprimibile nella forma
p
S
t
B
t
A
t
x
(
)
=
⋅
sin(
ω
⋅
)
+
⋅
cos(
ω
⋅
)
+
(4.9) essendo Sp una soluzione particolare dell’equazione,ω
la frequenza propriadel sistema, A e B due costanti che dipendono dalla forza incognita F. Per calcolare F si impone che all'annullarsi della velocità, all'istante
tmax incognito, l'ampiezza dell'oscillazione sia uguale all'ampiezza massima
misurata sperimentalmente, e cioè:
=
=
ampiezza
)
t
(
x
)
t
(
x
max max0
(4.10)Imporre la condizione (4.10) significa risolvere un sistema di due equazioni nelle due incognite F e tmax essendo quest’ultimo l’istante in cui si
raggiunge il primo picco dopo lo sparo.
Nel caso dello sparo caldo è necessario tener conto del fatto che esiste un contributo, all’oscillazione rilevata dagli strumenti, dovuto alla semplice
65 apertura delle valvole, all’immissione del propellente in camera ed, eventualmente, all’alimentazione del solenoide.
Quest’ultimo contributo è probabilmente dovuto alla generazione di campi magnetici variabili, causati da correnti parassite nelle parti metalliche adiacenti al solenoide, durante le fasi iniziale e finale di passaggio di una corrente variabile nell’avvolgimento.
Tutti questi contributi di spinta fredda non devono ovviamente entrare a far parte del computo della spinta effettiva, ed è quindi necessario effettuare preventivamente dei rilevamenti sugli spari freddi per determinarne l’entità.
Successivamente, nell’elaborazione dello sparo caldo si terrà conto del contributo legato alla semplice immissione del propellente.
In figura 5.5 si riporta il confronto tra l’andamento misurato dello spostamento e quello previsto utilizzando la procedura appena descritta
66
4.5 La misura di spinta con blocco della bilancia
Il vecchio metodo di misura della spinta, usato in precedenza al Centrospazio, da luogo a risultati che non presentano una buona ripetibilità.
Questo è principalmente dovuto al fatto che il motore prima dello
sparo caldo è libero di oscillare e per questo motivo, non conosco a priori il
valore dello spostamento e della velocità della massa mobile prima dello sparo.
Infatti tali valori sono calcolati facendo uno zoom del segnale al momento dello sparo e questo comporta una non precisa misura dello spostamento e della velocità.
Per questo motivo si è pensato di realizzare un sistema di bloccaggio della bilancia che permette di bloccare il motore prima e durante lo sparo
freddo lasciandolo libero poco prima dello sparo caldo.
L’utilizzo del sistema di bloccaggio mi permette di conoscere esattamente sia lo spostamento sia la velocità al momento dello sparo.
Lo spostamento sarà pari all’ampiezza dell’oscillazione mentre la velocità sarà nulla per ogni condizione operativa.
4.5.1 Sistema di Bloccaggio della bilancia
Il dispositivo di bloccaggio utilizza come forza bloccante, quella di un magnete di ritenuta che ha le seguenti caratteristiche :
o Forza di mantenimento = 35 N a 48 Volt
o Magnetismo residuo = 2 N a 0 Volt
o Modo di funzionamento = a mancanza di tensione Durante uno studio preliminare, atto ad individuare una serie di possibili soluzioni per il sistema di bloccaggio della bilancia, sono state prese in esame varie soluzioni costruttive.
Abbiamo indagato varie soluzioni montando il magnete di ritenuta sia ortogonalmente sia parallelamente alla direzione di spinta del motore.
67 La soluzione costruttiva utilizzata prevede il montaggio del magnete solidale al supporto del proximitor in modo tale che la forza magnetica esercitata dal magnete sia parallela alla forza di spinta del motore.
Lo schema di montaggio è riportato in figura 4.6, questa soluzione è in grado di mantenere completamente fermo il motore.
Fig.4.6 Schema di montaggio.
La distanza fra il magnete non alimentato e la piastra magnetica è di 0.5 mm.
Il magnete è collegato sia ad un alimentatore a 48 Volt sia ad un relè che serve a interrompere l’alimentazione del magnete.
In figura 4.7 è riportato lo schema elettrico di blocco e sblocco del magnete.
68
Fig.4.7 Schema elettrico del meccanismo di blocco e sblocco.
Il meccanismo di blocco e sblocco del magnete si può riassumere nei seguenti punti:
o Alimento il magnete a 48 volt
o Il magnete esercita una forza attrattiva di 35 N sulla piastra polare, attirando verso di se la bilancia con il motore
bloccandola.
o Aziono il relè premendo il pulsante di sparo
o Il motore si sblocca e rimane libero fino a che tengo premuto il pulsante,una volta lasciato il pulsante il motore si riblocca immediatamente.
o Il ritardo del relè(10 msec) rispetto all’apertura delle valvole viene impostato grazie ad un apposito retarder che si trova nella scatola di sparo.
In figura 4.8 è rappresentato uno schema dei vari trigger. V
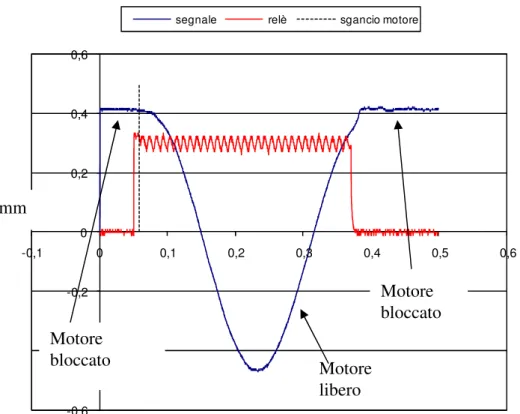
69 Abbiamo verificato sperimentalmente, bloccando e sbloccando il motore (vedi fig.4.9) , che una volta azionato il relè, il motore impiega circa 8 msec prima di staccarsi dal magnete a causa del magnetismo residuo.
Fig.4.8 Sequenza di scarica.
Fig.4.9 Segnale di sblocco del motore
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05 -0,01 0 0,01 0,02 0,03 0,04 0,05 0,06 segnale in mm relè Motore bloccato A 0.025sec viene azionato il relè Motore libero 0.033msec Motore ancora bloccato
70
In figura 4.10 è riportato un tipico segnale del proximitor durante uno sparo caldo
Fig. 4.10 Segnale proximitor a PFN 3
-0,6 -0,4 -0,2 0 0,2 0,4 0,6 -0,1 0 0,1 0,2 0,3 0,4 0,5 0,6
segnale relè sgancio motore
Motore bloccato Motore bloccato Motore libero Tempo [sec] mm
71
4.5.2 Elaborazione del segnale del proximitor.
La misura della spinta utilizzando il sistema di bloccaggio della bilancia, presenta analogie e differenze rispetto al sistema di misura utilizzato in precedenza ad ALTA S.p.a.
La procedura adoperata consente di calcolare dal segnale dell’oscilloscopio la spinta prodotta durante i cosiddetti spari caldi, il magnetismo residuo presente durante l’oscillazione libera e il contributo della spinta fredda e del magnetismo residuo durante lo sparo freddo.
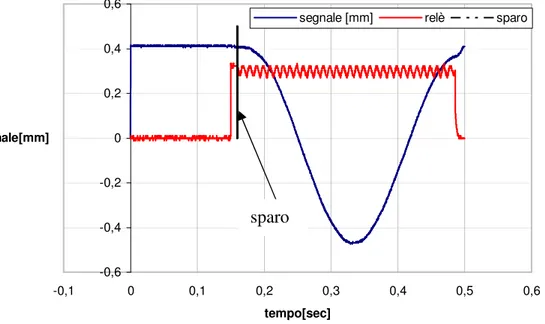
In figura 4.11 sono riportati, un tipico segnale del trasduttore di spostamento durante uno sparo del motore e il segnale del relè.
Cinque millisecondi dopo il segnale del relè il motore è sganciato dal magnete.
Lo sparo del motore avviene dieci millisecondi dopo il segnale del relè.
Come si può notare, prima dello sparo, il motore è completamente fermo non ci sono oscillazioni causate dalle vibrazioni del basamento della camera di prova dovute alle normali attività di laboratorio,non ci sono neppure oscillazioni dovute all’immissione del gas e all’attivazione del solenoide per cui la velocità della massa mobile prima dello sparo è nulla.
In figura 4.12 sono riportati il segnale del relè e un tipico segnale del proximitor durante una oscillazione libera del motore, dovuta semplicemente allo sgancio del motore stesso dal blocco magnetico.
72
Fig. 4.11 Segnale del proximitor durante sparo caldo
Fig.4.12 Oscillazione libera
-0,6 -0,4 -0,2 0 0,2 0,4 0,6 -0,1 0 0,1 0,2 0,3 0,4 0,5 0,6 tempo[sec] segnale[mm]
segnale [mm] relè sparo
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 tempo segnale[mm] sparo
73 La procedura seguita per ricavare la spinta da un grafico come quello di figura 4.11 si può riassumere nei seguenti punti :
o Applicando la trasformata di Fourier al segnale si ricava la frequenza di oscillazione del sistema e quindi la pulsazione propria;
o Dalla (4.5), nota la massa mobile, si ricava la costante elastica
K’;
o Dal segnale del proximitor durante l’oscillazione libera si ricava l’ampiezza dell’oscillazione
o Nota l’ampiezza dell’oscillazione si può ricavare l’asse di oscillazione
o Utilizzando, come descritto di seguito, i dati sperimentali così ottenuti e conoscendo il tempo di applicazione della forza costante F, si riesce a ricavare il valore della spinta.
Da un punto di vista matematico l’equazione del moto è la (4.3) con
≥
<
≤
=
*
0
*
0
)
(
t
t
se
t
t
se
F
t
F
(4.11)essendo F il valore costante della spinta e t* il tempo di applicazione della forza.
Le condizioni iniziali del problema sono:
( )
( )
= = 0 0 0χ
χ
ampiezza (4.12)l’ampiezza si ricava dal segnale di oscillazione del motore, la velocità all’istante iniziale è nulla .
La soluzione generale della (4.3) è esprimibile nella forma
p
S
t
B
t
A
t
x
(
)
=
⋅
sin(
ω
⋅
)
+
⋅
cos(
ω
⋅
)
+
(4.13)74
dove Sp è una soluzione particolare dell’equazione ,
ω
la frequenza propria del sistema, A e B due costanti che dipendono dalla forza incognita F.Per il calcolo di F si procede in questo modo: indicato con
sperimentale l’istante in cui il segnale reale interseca l’asse di oscillazione
e con tzero l’istante calcolato imponendo che
χ
( )
tzero =0 (4.14) si impone che tzero(F) sia uguale a sperimentale.Nel caso di sparo caldo è necessario tener conto di vari contributi che sono :
o contributo dovuto alla semplice immissione del propellente in camera.
o magnetismo residuo di 2N dato dal magnete di ritenuta
Per questo motivo è necessario fare degli spari preventivi per stimarne l’entità.
Si eseguono quindi alcuni spari considerando la sola immissione di propellente in camera e alcuni spari considerando la sola oscillazione libera del motore.
Calcolata la spinta nei due casi devo confrontare i due risultati , se il valore trovato con l’oscillazione libera è molto maggiore rispetto a quello ottenuto con lo sparo freddo, posso trascurare lo sparo freddo.
Nel nostro caso l’oscillazione libera da un contributo di circa 1.9N, risultato molto buono perché prossimo al valore del magnetismo residuo del magnete; questo fatto mi permette così di poter fissare,all’interno del
programma, il magnetismo residuo a 2N.
Di contro, l’immissione di gas in camera da una spinta di circa 0.08N nel caso di assenza di campo magnetico applicato, mentre nel caso di campo applicato a 50 e 100 mT da un contributo di circa 0.1N .
In questo caso posso considerare solo il magnetismo residuo. Inoltre è bene notare che lo sparo tende ad avvicinare il motore al magnete, questo fatto comporta un incertezza sulla stima della durata del magnetismo residuo, che sarà diversa per ogni sparo del motore.
Successivamente, nell’elaborazione dello sparo caldo si terrà conto del contributo legato al magnetismo residuo.
75
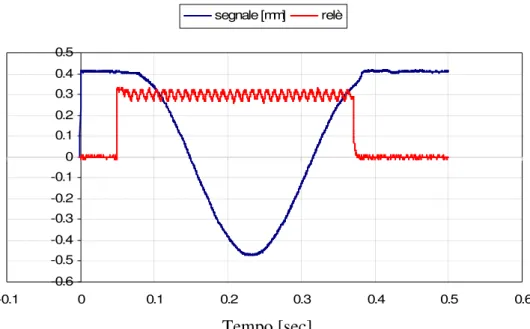
Fig. 4.13 Segnale proximitor durante immissione propellente
Per l’esatto calcolo della soluzione devo prestare attenzione al confronto tra il segnale reale dello spostamento e quello previsto utilizzando la procedura appena descritta.
Con riferimento alla figura 4.14 la curva in blu rappresenta la curva ricavata dal segnale del proximitor mentre la curva in rosso rappresenta la curva ricavata sperimentalmente.
I programmi di calcolo per la sparo freddo e per lo sparo caldo sono stati realizzati in ambinte Matcad e sono entrambi riportati in Appendice A.1 . -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 segnale [mm] relè Tempo [sec]
76
Fig. 4.14 Confronto fra soluzione teorica e sperimentale Tempo [ sec]


![Fig. 4.14 Confronto fra soluzione teorica e sperimentale Tempo [ sec]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7296666.86567/20.892.184.661.197.597/fig-confronto-fra-soluzione-teorica-sperimentale-tempo-sec.webp)