C
APITOLO 4
Sviluppo di un prototipo
Dopo aver scelto i componenti necessari e aver progettato in linea di massima il data logger, procediamo alla realizzazione di un prototipo che permetta la rilevazione dei dati di nostro interesse. Realizzeremo il circuito del sensore di Hall su una scheda millefori. In una prima fase testeremo l’attendibilità dei risultati forniti da esso con un esperimento in laboratorio, mentre in seguito monteremo la scheda su un veicolo a due ruote per testarne l’efficacia su strada e in particolare verificarne la sensibilità nella rilevazione delle variazioni di azimuth durante la MCDD.
72
4.1 Scopo e necessità del prototipo
Questo prototipo ha la funzione di testare il sensore di Hall; in particolare di verificare se l’informazione rilevata da esso sia sufficiente a comprendere correttamente il termine della MCDD. Infatti, come già accennato in precedenza, questo è l’elemento cardine dell’intero progetto e una sua insufficienza nella rilevazione renderebbe vano l’intero lavoro. Sarebbe certamente possibile ottenere i medesimi risultati attesi dal sensore di Hall con l’ausilio di altri dispositivi, ma il vincolo primario per la progettazione dell’elettronica per il motoveicolo è il prezzo, che non deve essere troppo elevato.
Vi è inoltre la necessità di sviluppare un prototipo che permetta di validare con dati sperimentali le ipotesi fatte finora e che in caso di esito positivo garantisca l’efficienza del progetto. In quest’ottica si inserisce quindi il nostro prototipo, una sorta di studio di fattibilità del progetto stesso, che permette anche inizialmente di ottenere i risultati sperimentali con un budget minore.
4.2 Diagramma a blocchi del prototipo
L’idea sviluppata nel prototipo è quella di confrontare il segnale in uscita dal sensore e il segnale proveniente da un GPS, per verificare l’attendibilità del primo.
73
Come si può vedere dalla figura 4.1, avremo tutte le parti tipiche di un data logger: alimentazione, sensori, controllo, memoria, elaborazione e comunicazione. Vediamo nel dettaglio come sono state implementate:
Figura 4.1 – Diagramma a blocchi del prototipo
Alimentazione: è stata utilizzata una batteria per motoveicoli che fornisce 12 V.
Controllo: è stato utilizzato un microcontrollore della Atmel, modello ATmega32, montato sulla demo-board STK500.
74
Comunicazione: per quanto riguarda la comunicazione tra i componenti montati sul veicolo a due ruote e il notebook di elaborazione dati, si è optato per il protocollo Bluetooth.
Memoria: avendo previsto la comunicazione con un notebook, per la memorizzazione dei dati è stato utilizzato l’hard disk di esso.
Sensori: abbiamo ovviamente il sensore di Hall scelto in precedenza. Sensore di confronto: utilizzeremo un GPS che trasmette i dati via
Bluetooth.
4.3 Componenti e schema elettrico del prototipo
Vediamo le varie parti del nostro prototipo:
Batteria per scooter: essa fornisce l’alimentazione per i vari componenti ed
eroga una tensione di 12 VDC. E’ stata prevista una protezione dalle sovratensioni mediante un diodo posto in serie alla batteria stessa. Questa è collegata alla demo board STK500 e alla scheda millefori per alimentare sensore di Hall e amplificatori operazionali.
Demo board STK500: è la parte di controllo del prototipo. Su di essa è montato
il microcontrollore ATmega32 che gestisce la comunicazione con il sensore e con il modulo Bluetooth presenti sulla scheda millefori. In particolare riceve in ingresso il segnale del sensore di Hall, opportunamente amplificato, e lo converte in un segnale digitale; questo segnale viene nuovamente mandato alla scheda millefori tramite la porta UART. E’ inoltre collegato al pin di ricezione del modulo bluetooh. Oltre a questo compito di controllo ha anche la funzionalità di fornire, mediante un regolatore interno, una tensione di
75
alimentazione regolata per il modulo Bluetooth, il quale, a differenza degli altri componenti della scheda millefori, deve ricevere una tensione di 3,3 V.
Scheda millefori: rappresenta il vero e proprio corpo del prototipo, contenendo
il sensore con il relativo circuito di condizionamento del segnale. Quest’ultimo ha subito una leggera modifica rispetto a quello preventivato nel capitolo precedente: è stato aggiunto un potenziometro in serie alla resistenza che collega il primo stadio di amplificazione al secondo (R6). Il potenziometro permette di regolare il guadagno che vogliamo dal secondo stadio e quindi posizionare meglio il segnale di uscita nella dinamica del convertitore; tale segnale deve essere centrato intorno alla metà di questa dinamica, ovvero intorno a 1,28 V.
76
Ricevitore GPS SiRF Star III : questo modello di GPS permette di raggiungere
un’accuratezza di 10 m, sensza tecniche di correzione; tuttavia per migliorare tale valore esiste la possibilità di utilizzare il GPS con la correzione WAAS. Richiede un’alimentazione di 5 V e ha al suo interno una batteria al litio ricaricabile, della durata di circa 12 ore. Non ha bisogno di elettronica esterna, in quanto presenta un’antenna di tipo patch integrata; tuttavia, qualora non fosse sufficiente è presente anche la connessione per un’antenna esterna. Permette di comunicare con una stazione di elaborazione tramite il protocollo Bluetooth, che riesce a trasmettere fino a 10 m di distanza [S22].
Promi ESD01Bluetooth: questo modulo Bluetooth riceve segnale in ingresso
tramite interfaccia UART, con livelli logici di tipo TTL. Richiede un’alimentazione di 3,3 V, che noi forniremo tramite il microcontrollore, e ha dimensioni piuttosto ridotte, di circa 3 mm x 3 mm x 1,4 mm. La distanza raggiungibile da esso arriva fino ai 100 m, se si utilizza con l’antenna fornita in dotazione; cambiando questa si possono raggiungere anche distanze più elevate. Infine permette di essere programmato tramite interfaccia USB direttamente da un personal computer.
4.4 Testing del prototipo
Il circuito di condizionamento del sensore di Hall, come detto, è stato realizzato su una scheda millefori ed è stato sottoposto a varie operazioni di testing; la parte di memorizzazione ed elaborazione dati è stata eseguita sempre utilizzando un notebook. Inizialmente i dati sono stati inviati tramite la porta seriale della demoboard STK500, collegata ad una porta USB del pc
77
mediante un cavo adattatore da seriale a USB. I primi dati sono stati ricevuti utilizzando un semplice programma freeware, Terminal v 1.9b, che ha le stesse funzionalità di Hyper Terminal di Windows, in quanto permette la lettura dei dati ricevuti sulle varie porte seriali del pc. In seguito è stata modificata la comunicazione, abbandonando il cavo e passando al Bluetooth; disponendo di un notebook con ricevitore wireless integrato non è stato necessario hardware aggiuntivo; a livello software, è stato inoltre possibile utilizzare il programma precedente. I dati così raccolti sono stati, come vedremo più avanti, elaborati con Excel, altro noto programma del pacchetto Office di Windows. Dopo aver fatto questi primi test sulla comunicazione tra scheda e notebook, siamo passati ad utilizzare LabView v 8.2 della National Instruments, per gestire la comunicazione, guadagnando così la possibilità di elaborare i dati in linea.
4.4.1 Preparazione della struttura di testing
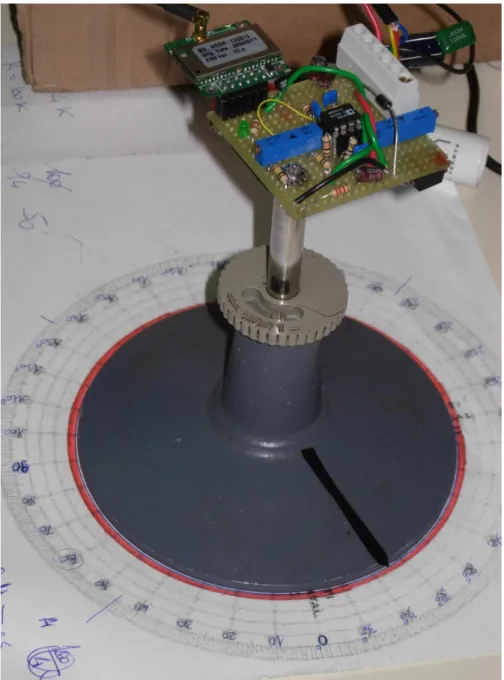
L’obiettivo di questi primi test è verificare la risoluzione del sensore e la velocità di risposta dello stesso. In particolare vogliamo rappresentare la variazione della tensione in funzione sia dell’azimuth sia del tempo quando si compie una rotazione di 360°. Abbiamo pensato di montare la scheda su un supporto che ci desse la possibilità di mantenere stabile sul piano orizzontale il sensore durante l’esecuzione delle rotazioni; è stato praticato pertanto un foro sulla scheda stessa per permetterne il fissaggio alla base di supporto tramite una vite. La figura 4.3 mostra la scheda montata sul supporto appena citato. Dalla figura si evince anche come sia stato possibile far compiere al sensore delle rotazioni di angoli noti. In particolare è stato delineato il contorno circolare della base del supporto su un foglio con la circonferenza goniometrica stampata; sono stati poi segnati angoli con un passo di 10°, vale a dire pari alla risoluzione che vorremmo dal sensore, e infine è stato segnato sul supporto un riferimento per permettere la lettura dell’angolo.
78
,
Figura 4.3 – Supporto scheda millefori
Per tracciare la scala angolare, abbiamo direzionato approssimativamente il sensore verso il nord geografico, per avere inizialmente i valori più elevati di tensione, e poter regolare l’intero segnale nella dinamica del convertitore; infatti in corrispondenza del nord geografico il sensore percepirà il campo massimo a causa di un azimuth nullo e quindi di un valore unitario del coseno.
79
Nell’intorno di tale punto è stato scelto lo zero della nostra scala e poi sono stati tracciati tutti gli angoli della circonferenza goniometrica con passo, come detto, di 10°. Vediamo ora i test effettuati e i dati raccolti:
1. Tensione in funzione dell’azimuth;
2. Tensione in funzione del tempo in una rotazione di 360°.
4.4.2 Tensione in funzione dell’azimuth
Per quanto riguarda il primo esperimento è stato posizionato il sensore sullo zero della scala goniometrica e sono stati rilevati i primi valori numerici; l’acquisizione dei dati è stata effettuata con Terminal, sia con comunicazione tramite il cavo adattatore sia tramite protocollo Bluetooth. Per ogni angolo il sensore viene lasciato fermo per pochi secondi durante i quali vengono lette e memorizzate alcune decine di valori; successivamente la base viene fatta ruotare fino all’angolo successivo (passo di 10°) e ne vengono immagazzinati altri, poi sul successivo e così via fino a completare la rotazione di 360°. Si capisce quindi come tra la misura di tensione relativa ad un angolo e al successivo intercorra un certo intervallo di tempo, cosa che non accadrà nel secondo esperimento. Dopo aver acquisito tutti i dati, è stata effettuata una media sui valori relativi ad ogni angolo, per permetterne una migliore leggibilità. Infatti, dall’analisi dei dati sperimentali, è stata osservata una oscillazione sull’uscita del sensore di ampiezza pari a circa 200 mV (picco-picco): l’operatore media permette di ridurre sensibilmente queste oscillazioni, fino a dimezzarle.
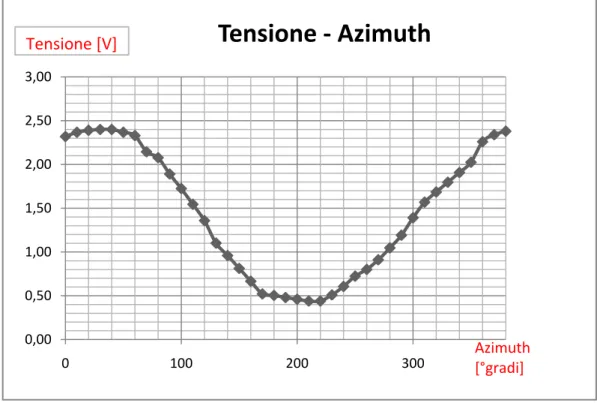
In figura 4.4 viene rappresentata la tensione in funzione dell’azimuth del sensore, come detto, con un passo di 10°.
80
Figura 4.4 – Grafico della tensione in funzione dell’azimuth
Come già spiegato nel capitolo precedente, è possibile confrontare il valore massimo che ci attendiamo con quello effettivamente risultante dal grafico:
𝐴𝑚𝑝𝑖𝑒𝑧𝑧𝑎 𝑡𝑒𝑛𝑠𝑖𝑜𝑛𝑒 𝑝𝑖𝑐𝑐𝑜 − 𝑝𝑖𝑐𝑐𝑜 ≈ 1,90 V 𝑉𝑚𝑎𝑥 = 0,95 𝑉
(1)
𝐻𝑒 =𝑉𝑚𝑎𝑥
𝑆∙𝐴 ∙ 103 ≈ 0,24 𝐺
(
2)Nelle formula (1) è possibile osservare il valore massimo ottenuto della tensione, calcolato quindi con azimuth nullo, mentre nella (2) è stato calcolato il valore dell’intensità del campo magnetico totale ricavato dalla Vmax
precedente. Il valore atteso era di 0,23 G, ma quello ottenuto è un valore più
0,00 0,50 1,00 1,50 2,00 2,50 3,00 0 100 200 300
Tensione - Azimuth
Azimuth [°gradi] Tensione [V]81
che accettabile, poiché alcuni fattori possono essere intervenuti per alterare la misura suddetta:
Sensibilità S del sensore: è stato utilizzato il valore nominale, ma su di esso c’è un certo errore.
Inclinazione del sensore rispetto al piano orizzontale: il sensore non sarà perfettamente perpendicolare al piano, quindi bisognerebbe conoscerne l’angolo di inclinazione, per poi modificare opportunamente la declinazione magnetica.
Amplificazione: è stata utilizzata un’amplificazione non identica a quella calcolata nel capitolo precedente, poiché regolata col potenziometro sul secondo stadio.
Con queste dovute premesse il risultato ottenuto è stato considerato quindi soddisfacente; oltre alle informazioni già citate, il grafico di figura 4.4 fornisce anche altre chiavi di lettura. Innanzitutto il segnale in funzione dell’azimuth ha l’andamento di una cosinusoide, come ci aspettavamo dalle considerazioni fatte nel capitolo precedente. Inoltre considerando l’ampiezza picco-picco di formula (2) e dividendo per 36°, si ottiene la tensione che si rileva in seguito ad una variazione di 10° dell’azimuth; tale tensione risulta dell’ordine dei 60 mV. E’ possibile fare considerazioni sul nord geografico e sul nord magnetico, in quanto noi avevamo posizionato il sensore in modo che approssimativamente fosse diretto verso il primo. Coerentemente con ciò abbiamo rilevato il massimo del campo magnetico, e quindi azimuth nullo e direzione del nord magnetico leggermente spostata, in particolare tra 10° e 30°. Molto interessanti sono le considerazioni sulle variazioni di tensione che si rilevano nel passaggio da un angolo al successivo; non sono assolutamente costanti e hanno valori più elevati nell’intorno di 90° e 270°, mentre i valori sono minimi nell’intorno
82
dello zero e di 180°. Questo è coerente con la derivata del coseno che è nulla nell’intorno di zero e massima a 90°; tutto ciò è molto importante poiché converrà posizionare la scala di un dispositivo che si basa su questo sensore nella zona di maggiore variazione per ottenere valori di tensione più consistenti.
4.4.3 Tensione in funzione del tempo
Per quanto riguarda il secondo esperimento l’obiettivo è visualizzare cosa accade alla tensione ruotando il sensore in maniera continua di 360°, quindi di rappresentare in funzione del tempo questo andamento. Come è facile immaginare dalle considerazioni fatte in precedenza, anche in questo caso ci attendiamo una cosinusoide.
Figura 4.5 – Grafico della tensione in funzione del tempo 0,00 0,50 1,00 1,50 2,00 2,50 0 1,6 3,2 4,8 6,4 8 9,6 11,2 12,8 14,4 16 17,6 19,2 20,8 22,4 24 25,6 27,2 28,8 30,4 32 33,6 35,2 36,8 38,4 40 Ten sion e [V] Tempo [s]
Vout vs tempo
83
L’andamento della tensione in funzione del tempo è osservabile in figura 4.5 ed effettivamente la forma del segnale è quella di una cosinusoide. In particolare si può osservare che l’ampiezza picco-picco è coerente con i risultati dell’esperimento precedente e quindi anche il valore massimo raggiunto dalla tensione è di circa 0,95 V. Si può osservare come la zona di lavoro più utile per il nostro sensore sia quello nell’intorno di 90° di azimuth, dove il segnale ha una andamento abbastanza lineare. In questo modo avremo un aumento o un decremento della tensione in funzione del verso di rotazione, e conseguentemente della disposizione del sensore: partendo da un azimuth di 90° sulla scala precedente, nel caso ci si avvicini al nord magnetico, ruotando il sensore verso sinistra, avremo un aumento del valore del campo magnetico terrestre rilevato e quindi della tensione, nel caso ci si allontani da esso, ruotando verso destra, avremo una sua diminuzione, testimoniata da una diminuzione della tensione.
Come detto l’andamento del segnale è quello preventivato in linea di massima, anche se vi sono molte variazioni veloci del segnale e quasi istantanee, che potrebbero essere eliminate utilizzando un filtro passa alto. In ogni caso alcune irregolarità evidenti dal grafico sono state causate da limiti legati alle modalità di esecuzione dell’esperimento. Infatti è stata compiuta una rotazione approssimativamente continua, in quanto limiti umani impediscono una perfetta rotazione senza pause o spostamenti laterali del supporto. Quindi alcune eccessive oscillazioni del segnale sono causate anche da questo tipo do errori sperimentali.
84
4.5 Esperimento su strada
Per concludere il lavoro di testing nonché di questa tesi si è pensato di provare il dispositivo su strada durante l’esecuzione di una vera e propria MCDD. Oltre ai componenti già citati in precedenza sono state realizzate due schedine millefori provviste di un interruttore e di un led per simulare il comportamento delle frecce.
Figura 4.6 – Schede millefori che simulano le frecce
In figura 4.6 sono mostrate le schede millefori suddette, molto importanti per comprendere se i dati acquisiti siano relativi alla MCDD o meno. Infatti l’acquisizione dei dati è continua, ma a noi interesserà soprattutto vedere come
85
si comporta il sensore in prossimità di una curva. Nella suddetta situazione, a seconda del verso di svolta, verrà attivato l’indicatore destro o sinistro; tale segnale sarà acquisito insieme a quello del sensore, per permetterci di sapere quando i valori dell’azimuth si riferiscono ad un rettilineo oppure ad una svolta. Entrambi i segnali sono visualizzati tramite un interfaccia labview e contemporaneamente memorizzati in un file.
Per quanto riguarda il segnale del GPS, la frase del protocollo NMEA di nostro interesse è quella con prefisso GPRMC (Recommende Minimum specific ), dalla quale possiamo estrarre la latitudine e la longitudine, utili per confrontare i cambiamenti di posizione del prototipo con le informazioni provenienti dal sensore. Le stringhe vengono ricevute tramite la stessa interfaccia labview per garantire la sincronizzazione dei vari segnali e per selezionare solamente le parti di interesse della frase NMEA.
4.5.1 Prima prova
La prima prova è stata effettuata nel parcheggio del dipartimento di ingegneria aerospaziale in via Caruso, utilizzando un autoveicolo. Il sensore è stato posizionato sul porta oggetti del cruscotto ed è stato orientato con la direzione sensibile perpendicolare alla traiettoria; l’azimuth del veicolo sarà traslato così di 90° rispetto al segnale rilevato dal sensore.
86
Figura 4.7 – Percorso prima prova
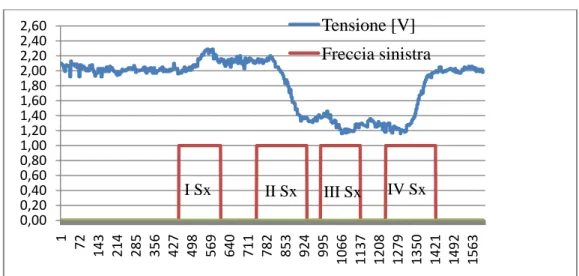
In figura 4.7 è rappresentato il percorso che è stato effettuato e si possono distinguere sia il punto di partenza sia le varie curve effettuate; il punto di arrivo coincide con quello di partenza. Sono state così eseguite quattro MCDD, tutte a sinistra; ogni curva è indicata con un numero progressivo, per poterla distinguere nel grafico successivo di figura 4.8. In tale grafico sono stati rappresentati sull’asse delle ordinate sia l’andamento della tensione sia quello delle frecce; sull’asse delle ascisse abbiamo numeri progressivi che rappresentano l’ordine di comparsa dei campioni. E’ una sorta di andamento delle grandezze in funzione del tempo, dato che l’indice dei campioni è un numero progressivo proporzionale al tempo in base alla velocità di trasmissione.
87
Analizziamo il grafico mettendo in evidenza le informazioni principali:
tensione di soglia: ipotizzando di aver scelto una soglia dell’ordine di 20-30°, in base ai conti fatti in precedenza si ottiene una corrispondente soglia di tensione dell’ordine dei 200 mV.
Figura 4.8 – Grafico prima prova
segnale frecce: il segnale rosso mostra l’andamento della freccia sinistra, che come è facile immaginarsi sarà spenta in corrispondenza di segnale nullo e accesa in corrispondenza di segnale unitario. Nell’attivazione della freccia abbiamo cercato di sincronizzarci il più possibile col conducente dell’autoveicolo; allo stesso modo nella disattivazione abbiamo cercato di rispettare la temporizzazione del dispositivo meccanico della macchina per poter confrontare i due comportamenti. 0,00 0,20 0,40 0,60 0,80 1,00 1,20 1,40 1,60 1,80 2,00 2,20 2,40 2,60 1 72 143 214 285 356 427 498 569 640 711 782 853 924 995 1066 1137 1208 1279 1350 1421 1492 1563 Tensione [V] Freccia sinistra I Sx II Sx III Sx IV Sx
88
punto di partenza (X): il sensore rileva un valore in tale posizione abbastanza elevato, ma non quello massimo poiché questo lo si raggiungerà istantaneamente durante la prima curva; infatti come si può vedere anche dal riferimento del nord geografico presente in figura 4.7, durante tale manovra il sensore sarà istantaneamente parallelo al nord magnetico.
prima curva (I Sx): considerando i valori senza alcuna manipolazione statistica otteniamo una variazione di tensione superiore ai 300 mV, rilevamento che ci avrebbe permesso di riconoscere la presenza della curva; tuttavia, come abbiamo sottolineato precedentemente, i valori forniti dal sensore hanno una variabilità dell’ordine dei 200 mV. Considerando allora i valori medi ogni 5 campioni si ottiene una variazione di tensione di circa 250 mV, quindi avremmo comunque rilevato la presenza di una curva.
seconda curva (II Sx): abbiamo un ampia variazione sia per i valori puri che per i valori medi; quindi anche in questo caso avremmo rilevato la seconda MCDD.
terza curva (III Sx): in questo caso abbiamo una piccola variazione della tensione in entrambe le procedure di analisi dei dati; per i dati non sottoposti a media si registra una variazione di 300 mV, mentre per i valori medi è di soli 200 mV. In questo caso siamo proprio al limite della soglia, potrebbe quindi presentarsi qualche problema nel rilevamento della curva.
quarta curva (IV Sx): come per la seconda curva abbiamo un’ampia variazione della tensione, quindi la curva sarebbe stata rilevata senza problemi.
89
Osservazioni
Massimo e minimo: nella rappresentazione grafica questi valori sono coerenti
con le attese, in quanto corrispondenti ad azimuth nullo e di 180° e quindi sfasati di un doppio angolo retto.
Terza curva: è quella che crea maggiori problemi in quanto siamo nella zona di
minima variazione del coseno, nell’intorno dei 180° e quindi la sua derivata è nulla. Inoltre è un tratto di strada molto breve prima della curva successiva, quasi da far sembrare un’unica curva la II Sx e la III Sx.
Tratto tra III Sx e IV Sx: ci sono valori non molto costanti e il motivo è legato
ad un inconveniente avvenuto durante la prova; si è presentata la necessità di sterzare per evitare una collisione con un pedone. Infatti ci saremmo aspettati valori molto più stabili come nel caso del tratto tra I Sx e II Sx.
4.5.1 Seconda prova
90
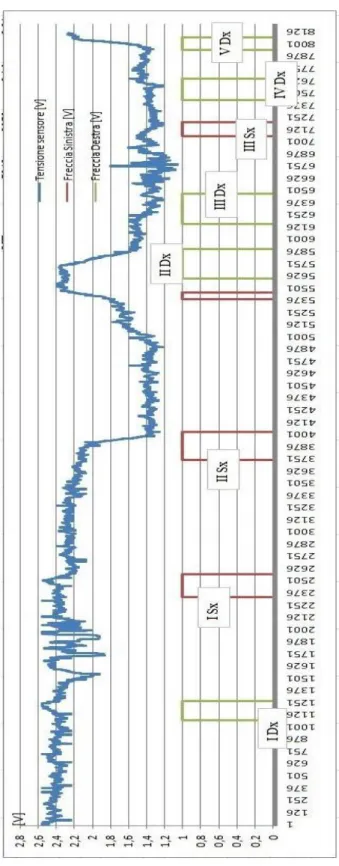
Nella seconda Prova il percorso è stato effettuato intorno al dipartimento di elettronica; lo vediamo evidenziato nella cartina di figura 4.9.
La II Sx è invece ampiamente sentita dal sensore con una variazione di tensione dell’ordine degli 800 mV; il tratto successivo del grafico (figura 4.10) è pressochè costante, dato che si riferisce ad un rettilineo (via Andrea pisano dietro il polo B di ingegneria). Dopo questo tratto si nota nel grafico l’indicatore della freccia sinistra, ma non è considerato come una MCDD, poichè fa riferimento ad un tratto di strada che curva autonomamente non implicando la necessità di attivare l’indicatore di direzione; in particolare è il tratto di via Pisano che passa dietro il polo C di ingegneria. Tra la II Sx e la II Dx si ha una variazione dell’azimuth di ben 180°, come in una manovra di inversione; il nostro dispositivo percepisce questo cambiamento di direzione e in particolare si nota un breve livello costante tra il valore massimo e il valore minimo corrispondente al tratto di strada citato in precedenza. La II Dx è una curva ben rilevata con variazioni di tensione dell’ordine degli 800 mV, in seguito abbiamo una curva sempre a destra dove le tensioni fornite sono paragonabili al limite di soglia, potrebbero pertanto presentarsi dei problemi nel riconoscimento della curva. A questo punto il sensore è di nuovo soggetto ai disturbi dovuti al sottopassaggio, poi abbiamo incontrato la rotatoria, nella quale il sensore risponde con tensioni molto basse. Infine si va incontro alle ultime due curve entrambe a destra; nella prima ci sono stati dei problemi di rilevamento, dovuti probabilmente ai disturbi precedenti, ma soprattutto alla solita zona di scarsa variazione del sensore; per quanto riguarda la seconda curva non vi sono problemi poiché si va verso posizioni con azimuth nullo.
91
92
4.5.3 Terza prova
Un’ultima prova è stata eseguita sul medesimo percorso della prima prova, ma utilizzando come mezzo di trasporto un carrello, normalmente utilizzato per il trasporto delle merci. Per la denominazione delle curve facciamo nuovamente riferimento alla figura 4.7, dove è rappresentato il percorso eseguito in macchina.
Figura 4.12 – Grafico Terza Prova
In figura 4.11 è rappresentato come per le precedenti prove, il grafico dell’andamento della tensione e delle frecce utilizzate. Vediamo le considerazioni principali che possono essere fatte anche confrontando la prova con quella eseguita con l’autoveicolo.
Dinamica: è sicuramente maggiore della precedente; ci siamo spiegati questo fatto considerando l’effetto schermante nei confronti dei campi magnetici ad opera della macchina. Essa è come un cilindro cavo che
0 0,5 1 1,5 2 2,5 1 102 203 304 405 506 607 708 809 910 1011 1112 1213 1314 1415 1516 1617 1718 1819 1920 2021 2122 2223 2324 2425 2526 2627 2728 campioni
Tensione del sensore [V] Freccia sinistra
I Sx II Sx III Sx IV Sx [V]
I Sx II Sx III Sx IV Sx [V]
93
permette di far scorrere il campo magnetico sulla superficie esterna; questo attenua leggermente il nostro segnale di interesse.
Curve: tutte e quattro le curve sono rilevate in maniera più che soddisfacente, con variazioni dell’ordine degli 800 mV per la prima e per la terza curva, e dell’ordine dei 400 mV per la seconda e la quarta.
Percorso: la partenza si ha con azimuth nullo, in quanto il sensore è sfasato di 180° rispetto alla traiettoria eseguita; quindi l’azimuth decresce con la I Sx, poi abbiamo un tratto costante e poi si arriva fino al minimo con la II Sx. Il tratto successivo è una zona di elevata variazione della tensione e si raggiunge un livello che differisce da quello del tratto tra prima e seconda curva; ci saremmo aspettati un valore identico, ma tale incongruenza è sicuramente dovuta alla variazione dell’inclinazione del carrello. Per muovere un carrello di questo tipo bisogna inclinarlo rispetto al suolo e poi cercare di mantenere l’inclinazione costante, ma in questo caso essa è cambiata come si nota dai dati rilevati nel grafico. Infine dopo la IV Sx si torna nella posizione di partenza.


![Figura 4.5 – Grafico della tensione in funzione del tempo 0,000,501,001,502,002,5001,63,24,86,489,611,212,814,41617,619,220,822,42425,627,228,830,432 33,6 35,2 36,8 38,4 40Tensione [V]Tempo [s]Vout vs tempo](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270233.83236/12.892.171.810.635.1034/figura-grafico-della-tensione-funzione-tempo-tensione-tempo.webp)