Cap.2
Panoramica
sui Motori Brushless
2 - 1
Panoramica sui Principali Motori Brushless:
Caratteristiche della Macchina e Tecniche di Controllo
Strutturalmente, i motori brushless sono motori sincroni a magneti permanenti, con avvolgimenti principalmente trifase (ma ne esistono anche versioni polifase, che però al momento occupano una piccola parte del mercato); tali avvolgimenti sono alimentati da un inverter, lo stato dei cui tasti viene controllato, in base ai segnali logici forniti da un sensore di posizione coassiale al rotore, in modo da cercare di ottenere, in qualsiasi condizione di funzionamento, 90° elettrici di sfasamento tra i campi elettrici statorico e rotorico, con il primo in anticipo
Figura 2.1 – Flussi di macchina
I motori brushless, altrimenti, possono essere visti anche sotto un’altra ottica, osservandoli cioè dal punto di vista funzionale, che porta a considerarli come dei motori a corrente continua (in cui le funzioni di indotto siano state portate sullo statore e quelle di induttore sul rotore) a magneti permanenti con commutazione elettronica: infatti, come nei motori cc al variare della posizione angolare il collettore/commutatore meccanico modifica il senso della corrente negli avvolgimenti rotorici in modo da mantenere ortogonali i campi statorico e rotorico, nei motori brushless lo stesso compito è svolto dal commutatore elettronico, e questa differenza è così importante da caratterizzarli fin nel nome: brushless, infatti, significa letteralmente “senza spazzole”, ed evidenzia appunto l’assenza di elementi striscianti (e quindi delle dissipazioni di potenza associate).
Dal momento che l’alimentazione è tale da mantenere sempre ortogonali i due campi, e ricordando la relazione ϕ φ φ φ φ sin C= S∧ R = S⋅ S ⋅ (2.1)
seguito a variazioni di carico e/o del riferimento di velocità, a differenza delle macchine sincrone tradizionali in cui tale rischio è ben presente e può portare ad ingenti danni al motore.
I motori brushless di più comune impiego presentano uno statore del tutto simile a quello delle altre macchine elettriche, con un avvolgimento trifase disposto in cave lungo tutta la periferia di traferro. Particolare attenzione va invece posta sui magneti permanenti, il cui tipo e configurazione incidono notevolmente sulle dimensioni, sul costo e sulle prestazioni della macchina, poiché si può infatti utilizzare un’ampia gamma di materiali, da quelli a più elevato prodotto di energia, quali il neodimio-ferro-boro (circa 20 kJ/m3), fino a quelli dalle capacità più modeste, quali le ferriti (prodotto di energia dell’ordine di 0,2 kJ/m3): l’adozione di materiali del primo tipo consente di minimizzare le dimensioni del motore ed in particolare il momento d’inerzia, il che li rende particolarmente adatti per tutte le applicazioni in cui siano richieste alta velocità di risposta o massima compattezza, applicazioni per le quali sia giustificato l’elevato costo di tale soluzione; fattore limitante in fase di progetto per magneti più modesti, invece, è il volume di materiale richiesto per produrre un’adeguata induzione al traferro, volume che si riflette poi sulle dimensioni del rotore.
Negli ultimi anni, per fortuna, la gamma di materiali magnetici a disposizione è andata via via ampliandosi, permettendo una maggior libertà in fase di progettazione: a ciò hanno contribuito gli sviluppi tecnologici nel settore, che hanno portato alla produzione di magneti sinterizzati o in polveri agglomerate; ai progressi tecnologici si è aggiunto un abbassamento del costo di tali materiali, grazie alla produzione di essi in Paesi ad economia emergente, e il complesso di questi due fattori ha portato alla riduzione del costo dei motori brushless, favorendone così l’utilizzo in molti settori dell’industria.
La disposizione più comune dei magneti è quella che li vede collocati sulla superficie cilindrica del rotore (il che conduce ad una struttura isotropa dello stesso), ma si trovano anche strutture anisotrope, con magneti posizionati in cave interne al giogo rotorico; la prima soluzione, però, viene preferita perché comporta una minore oscillazione di coppia e quindi migliori prestazioni dinamiche.
In relazione alla forma d’onda della forza contro-elettromotrice a regime (che dipende dalla distribuzione spaziale dell’induzione al traferro e dalla conformazione degli avvolgimenti statorici), si distinguono due tipi di motori brushless (che analizzeremo più approfonditamente in seguito):
- brushless trapezio, che presenta delle f.c.e.m con andamento trapezoidale - brushless sinusoidale, le cui f.c.e.m hanno forma sinusoidale.
I primi sono meno costosi e presentano un sistema di controllo più semplice, mentre i secondi consentono più facilmente di minimizzare le pulsazioni di coppia, utilizzando tecniche di progetto standard quali avvolgimenti a passo raccorciato o a foro frazionario.
Entrambi i tipi, comunque, sono adatti per l’impiego in applicazioni industriali o robotiche, in virtù della semplicità di controllo (sia di coppia che di posizione o velocità), delle ottime prestazioni dinamiche e dell’elevato rendimento, nonché, come detto, del limitato ingombro. A fronte di tali vantaggi vanno ricordati l’elevato costo (ridottosi nel corso degli anni, ma ancora superiore alle soluzioni classiche come i motori asincroni) e i problemi legati alla presenza dei magneti permanenti sul rotore, problemi che consistono nella variazione delle proprietà magnetiche alle diverse temperature (in particolare, al crescere della temperatura, una riduzione dell’induzione prodotta al traferro) e nel rischio di smagnetizzazione se sottoposti a campi coercitivi troppo elevati (il che comporta un vincolo sulle correnti statoriche).
Motore Brushless e Tecnica di Controllo Trapezoidale
La forma d’onda trapezoidale della f.c.e.m. è idealmente ottenibile impiegando un avvolgimento con conduttori uniformemente distribuiti e induzione prodotta dai magneti permanenti quadra, così da produrre a regime delle tensioni di fase con parte piatta di ampiezza 120° elettrici e modulo proporzionale alla velocità.
Con tale tensione mozionale raccolta negli avvolgimenti della macchina, si impiega una semplice tecnica di controllo al fine di ottenere una coppia costante all’asse: l’inverter alimenta due sole fasi del motore per volta, con correnti aventi a regime andamenti idealmente rettangolari (di ampiezza regolabile e estensione pari a 120° elettrici) con valore nullo negli intervalli in cui la corrispondente f.c.e.m. è variabile (come si può vedere dalla Figura 2.2)
Figura 2.2 – Tensioni di fase di un motore brushless trapezoidale e correnti di alimentazione
In relazione ai possibili stati delle correnti statoriche, il campo rotante di statore può assumere solo 6p (dove p è il numero delle coppie polari) posizioni spaziali; ne consegue che per il controllo della commutazione delle fasi è sufficiente individuare il “sesto” angolare di giro elettrico in cui si trova il vettore rappresentativo del campo magnetico rotorico: di conseguenza si possono utilizzare sensori di posizione a bassa risoluzione e di basso costo, contemporaneamente però i due campi non potranno essere mantenuti costantemente ortogonali, ma il loro sfasamento assume valori continuamente variabili tra 60° e 120° elettrici.
Malgrado ciò, per effetto del sistema di comando descritto, la coppia sviluppata (nel caso più comune di brushless isotropi) è costante, come si può verificare applicando le relazioni viste al paragrafo 1-1: infatti, poiché lo statore è isotropo (si può trascurare in prima battuta l’effetto delle aperture di cava), la mappa di campo a correnti nulle è costante per ogni posizione γ, dunque vale l’equazione (1.28); inoltre, essendo il rotore isotropo, il vettore M delle tensioni mozionali è costituito solo dalla componente M0, mentre MI è nulla poiché le induttanze non cambiano con la
posizione. In base a queste considerazioni, si può valutare il contributo alla coppia di ciascuna fase: quando infatti la f.c.e.m. VM(t) della k-sima fase è costante, anche il k-simo elemento del vettore M0
lo è (si ricordi l’equazione (1.5) a tal proposito), e dunque moltiplicandolo per una corrente ik
hanno sempre due fasi alimentate a corrente costante, in corrispondenza di una tensione mozionale costante, la coppia elettromagnetica prodotta dalla macchina risulta
I M 2 I E 2 C 0 m ⋅ ⋅ = Ω ⋅ = (2.2)
in cui si è supposto che le commutazioni siano istantanee, dalla quale si vede come il controllo della coppia possa essere fatto agendo direttamente sulla corrente.
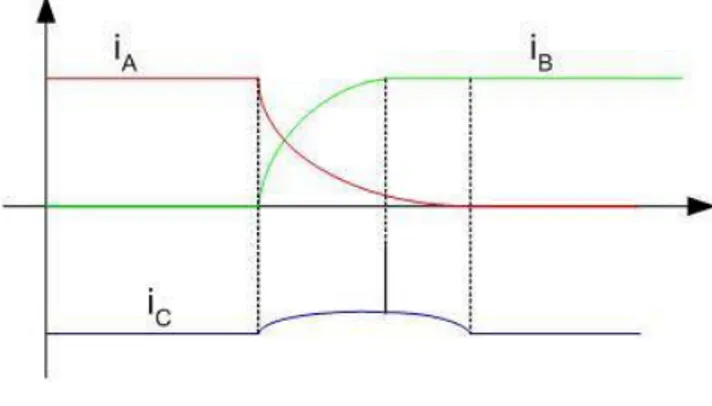
Nella realtà il funzionamento descritto è puramente ideale, dal momento che le f.c.e.m. non sono perfettamente trapezoidali (perché un gradino di induzione non è fisicamente realizzabile ma la distribuzione di B presenta un arrotondamento degli spigoli, e perché i conduttori non sono uniformemente distribuiti). Inoltre, per effetto delle induttanze del motore, le commutazioni non possono essere istantanee, così durante l’intervallo di commutazione si hanno tre fasi attive; poiché, poi, le durate dei transitori di accensione e spegnimento non sono uguali, anche la corrente non interessata dalla commutazione non si mantiene costante (perché vale sempre e comunque Σi=0), come riportato nella figura 2.3
Figura 2.3 – Transitorio di commutazione
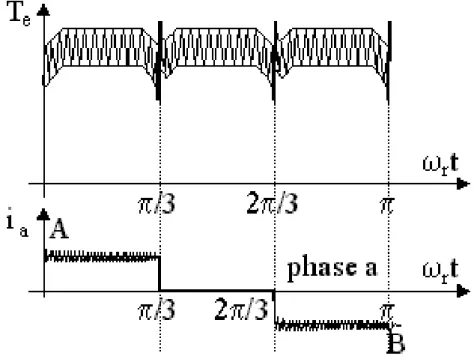
Per effetto di tutto ciò, l’andamento della coppia nel tempo presenta un’ondulazione di frequenza pari a 6 volte quella di alimentazione, e al crescere della velocità, aumentando la durata dell’intervallo in cui tutte e tre le fasi sono attive contemporaneamente, la coppia media si riduce. Nella figura 2.4 si mostra questa ondulazione di frequenza 6*fs nell’andamento della coppia, cui si
sovrappone il ripple ad alta frequenza derivante dall’azione di controllo dell’ampiezza delle correnti.
Figura 2.4 – Ondulazione della coppia e modulazione delle correnti
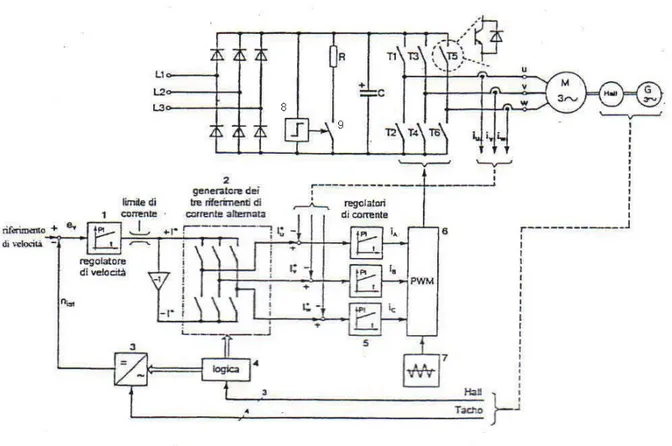
Un possibile schema di azionamento per un motore brushless trapezio è riportato in figura 2.5, nella quale sono evidenziate sia la parte di potenza che quella di regolazione:
- alimentazione: la tensione di linea (alternata trifase) viene raddrizzata per mezzo di un ponte a diodi e nuovamente trasformata in una tensione trifase, ma di ampiezza e frequenza variabile, per mezzo di un inverter, comandato dal sistema di regolazione. Sono presenti inoltre un condensatore, per mantenere il più costante possibile la tensione continua a monte dell’inverter, e una resistenza R, detta “resistenza di frenatura”, il cui ramo viene chiuso per mezzo del trigger 8: tale resistenza è necessaria in quanto, in caso di funzionamento da freno o generatore della macchina brushless, le correnti invertono il proprio senso di circolazione: non potendo ritornare verso la rete di alimentazione, per effetto dell’unidirezionalità del raddrizzatore a diodi, queste infatti tenderebbero a far salire la tensione cui è sottoposto il condensatore, col rischio quindi di distruggerlo; quando la tensione sul bus DC è maggiore di un apposito valore di sicurezza, il trigger 8 comanda la chiusura del tasto 9, permettendo così la richiusura delle correnti attraverso la resistenza di frenatura, che così dissipa l’energia elettromagnetica prodotta dalla macchina (funzionante da generatore), che altrimenti si accumulerebbe nella capacità C;
- regolazione: attraverso delle sonde ad effetto Hall (o altri possibili sensori) si misura la posizione angolare del rotore rispetto ad un dato sistema di riferimento, mentre un tachimetro rileva la velocità angolare della macchina; la prima misurazione è necessaria per stabilire, attraverso la logica 4, quali siano le fasi da alimentare, mentre la velocità viene portata in
retroazione (attraverso il raddrizzatore 4) per confrontarla con la velocità di riferimento: l’errore ev tra questi due segnali, per effetto del regolatore PI 1 e del generatore di riferimento
2, produce le tre correnti di riferimento con cui si debbono alimentare le fasi della macchina al fine di raggiungere la velocità richiesta; le 3 correnti vengono confrontate con quelle effettivamente circolanti, misurate grazie a dei TA, e gli errori tra questi due segnali vengono elaborati dai regolatori di corrente 5; infine, per effetto di una regolazione PWM, si ottengono i segnali di comando dei tasti T1-T6 dell’inverter.
Figura 2.5 – Schema a blocchi della regolazione trapezoidale
Motore Brushless e Tecnica di Controllo Sinusoidale
La forma d’onda sinusoidale viene ottenuta idealmente con distribuzioni sinusoidali degli avvolgimenti o dell’induzione al traferro. Poiché in effetti nessuna delle due può essere realizzata alla perfezione, si ricorre ai normali accorgimenti realizzabili sugli avvolgimenti, che vengono così realizzati in doppio strato e a passo raccorciato per ridurre al massimo le armoniche di f.c.e.m. che si producono inevitabilmente essendo la distribuzione degli avvolgimenti necessariamente discreta;
Il controllo sinusoidale, differentemente dal precedente, alimenta per mezzo di un inverter contemporaneamente tutte e tre le fasi del motore, imponendo a regime una terna equilibrata di correnti sinusoidali, le cui fasi sono rigidamente vincolate alla posizione del rotore. Il campo rotante statorico, diversamente dal caso trapezoidale, può assumere ogni posizione spaziale, e quindi il sensore di posizione necessario deve essere ad alta risoluzione.
Alimentando la macchina con correnti sinusoidali, si riesce ad ottenere una coppia costante. Come detto prima, infatti, la forza contro-elettromotrice che si raccoglie nelle fasi della macchina è sinusoidale, e dunque anche il vettore delle tensioni mozionali è sinusoidale
( )
( )
pγ Ω V γ , i M = M σ (2.3)Qualora anche per questa tipologia di motori si trascurino gli effetti delle cave, cioè si consideri isotropa la struttura statorica, la mappa di campo a correnti nulle è costante per ogni posizione assunta dal rotore, dunque ci ritroviamo nella condizione espressa dalla relazione (1.27) e si può scegliere come estremo inferiore di integrazione i=0. Integrando l’espressione (1.28), e ricordando che la macchina viene alimentata con correnti sinusoidali tali da produrre l’ortogonalità tra i flussi rotorico e statorico (quindi si può dire che I è in fase con VM), si ottiene
( ) ( )
I Ω V 2 3 pγ σ pγ σ I Ω V i M i d M W M T M i 0 T T E =∫
= ⋅ = ⋅ ⋅ = (2.4)L’ondulazione di coppia presente in questo tipo di azionamenti è dovuta solo alla non perfetta sinusoidalità delle f.c.e.m., imperfezione che come detto si cerca di ridurre con degli accorgimenti costruttivi.
2 - 2
Analisi Dinamica dei Motori Brushless:
Approssimazione alla Prima Armonica
In questo paragrafo applicheremo la teoria delle macchine elettriche ad un motore brushless rotante trifase, con p coppie polari, approssimando al primo ordine della loro serie di Fourier le funzioni descrittive delle distribuzioni degli avvolgimenti, della forza magneto-motrice a vuoto e del traferro, nonché delle correnti che circolano nelle fasi della macchina; ciò significa che utilizzeremo le funzioni
( )
, N( )
γ N( )
γ cos(
p(
α α( )
γ)
)
N 1 k k 1 k 0 k S α γ ≅ + − (2.5)( )
, F( )
γ F( )
γ cos(
p(
α α( )
γ)
)
F 1 M M 1 M 0 M S α γ ≅ + − (2.6)(
,)
0( )
γ 2( )
γ cos(
2p(
α 2( )
γ)
)
Sξ α γ ≅ ξ + ξ − ξ (2.7)Nelle equazioni qui sopra, le componenti di apice “0” rappresentano il valor medio di tali distribuzioni, cui si sovrappone una componente cosinusoidale di periodo 2π/p (per quanto riguarda le funzioni SN e SFM) o π/p (la funzione Sξ) e simmetrica rispetto, ad esempio per la funzione SFM,
all’angolo SαM. I coefficienti di tali funzioni sono tutti potenzialmente funzione della posizione
rotorica γ, ma assumono valore costante con la posizione nelle seguenti condizioni:
• Sξ: i coefficienti 0ξ e 2ξ dipendono da γ solo nel caso di anisotropia doppia, sia statorica che
rotorica; quando però almeno uno dei due elementi della macchina può essere considerato isotropo, le ampiezze delle armoniche di questa funzione sono costanti.
• SF
M: questa funzione presenta coefficienti dipendenti da γ solo nel caso che si abbiano magneti
permanenti disposti sia sul rotore che sullo statore, altrimenti 0FM e 1FM sono costanti.
• SN
k: questa funzione è a coefficienti variabili solo nel caso in cui l’avvolgimento k presenti un
lato di matassa disposto sul rotore e l’altro sullo statore, altrimenti 0Nk e 1Nk sono costanti.
Inoltre, nell’analisi di macchina, trascureremo gli effetti della saturazione, ipotizzando così di poter operare in condizioni di linearità magnetica e quindi di identità delle induttanze incrementale e differenziale; non essendoci più il rischio di confondere queste due quantità, nel seguito l’induttanza sarà indicata semplicemente con L.
Infine, l’ultima ipotesi posta è che siano trascurabili i fenomeni di isteresi e correnti parassite.
ipotesi semplificative esposte e quindi possiamo considerare costanti rispetto alla posizione le ampiezze del valor medio e della prima armonica delle funzioni N, FM e ξ. Infine, c’è da notare
come il segno di 2ξ dipenda dalle caratteristiche geometriche e magnetiche della macchina: infatti, se le funzioni FM e ξ presentano assi di simmetria coincidenti, cioè 1αM=2αA (come nel caso di
macchine a magneti interni), risulta 2ξ positivo, altrimenti tra i due assi di simmetria c’è uno sfasamento di 90° elettrici (1αM-2αA=π/2p, come avviene per i motori a magneti incassati) e lo 2ξ è
negativo.
Dal punto di vista della modellazione al primo ordine, i motori brushless trapezio e sinusoidale presentano la stessa scomposizione (in serie di Fourier) delle funzioni che le descrivono, e quindi si giunge allo stesso modello.
Se due macchine diverse hanno lo stesso modello, significa che quel modello è buono ma non descrive in modo ottimale nessuna delle due macchine; è comunque sufficiente per regolare abbastanza bene le macchine per mezzo di convertitori controllati e quindi si accetta un minor grado di precisione a fronte di una semplicità d’uso.
Stanti le semplificazioni imposte, dalla teoria delle macchine rotanti a tamburo lungo, si ricava che il valore dell’induttanza relativa all’accoppiamento magnetico tra le fasi k e h vale:
( )
(
(
)
)
( )
− + + − ⋅ = 2 α α γ α 2p cos 2 α α p cos N N l γ L h 1 k 1 A 2 2 h 1 k 1 0 h 1 k 1 0 Pkh ξ ξ π µ (2.8)mentre il flusso principale a vuoto concatenato con la fase k equivale a:
( )
(
(
( )
)
)
( )
( )
+ − + − ⋅ = Ψ 2 γ α α γ α 2p cos 2 γ α α p cos F N l γ M 1 k 1 A 2 2 M 1 k 1 0 M 1 k 1 0 Pk ξ ξ π µ (2.9)Considerando un avvolgimento trifase collocato sullo statore, gli angoli 1αk sono costanti e pari a
p 2 3 1 k αk 1 = − π (2.10)
e quindi la matrice delle induttanze principali risulta
( )
[
( )
( ) ( )
]
[
( )
(
) (
2pγ-4 3)
]
3 2 -pγ 2 pγ 2 L 3 4 3 2 0 L L 2 S S 0 P γ = σ σ π σ π + σ σ π σ π (2.11)dove i valori delle induttanze sono
π ξ N l L 2 0 S 1 0 S 0 =µ ⋅ ⋅ (2.12)
2 π ξ N l L 2 2 S 1 0 S 2 =µ ⋅ ⋅ (2.13)
all’induttanza principale di macchina si devono aggiungere gli effetti dovuti ai flussi dispersi, valutati tramite un’autoinduttanza globale LL, matematicamente rappresentata da una matrice
diagonale con elementi pari a LL.
Per ciò che riguarda il vettore dei flussi a vuoto, si calcola
( )
ψM( )
pγ0 γ = σ
Ψ (2.14)
Le resistenze statoriche sono tutte uguali e pari a RS, se la macchina è equilibrata, e sono
rappresentabili nel modello matematico tramite la matrice
= 1 0 0 0 1 0 0 0 1 R R S (2.15)
Per completare il modello espresso nelle variabili base, si devono calcolare il vettore delle tensioni mozionali
( )
(
)
p σ(
pγ π2)
2 π pγ σ 2 3 L p 2 dγ d i dγ dL M 0 2 S M + Ψ + + ⋅ = Ψ + = γ (2.16)e l’espressione del wrench
( )
( )
dγ d i i dγ dL i 2 1 i d γ M γ ,i W T T 0 i 0 T Ψ + = =∫
(2.17)A riguardo di questa ultima espressione, bisogna notare che si è potuto scegliere come estremo inferiore di integrazione la condizione di correnti nulle perché, essendo lo statore isotropo, in tal caso la mappa di campo non varia nei vari punti di statore.
Nel modello espresso in variabili base, come si vede, resta una dipendenza dei diversi elementi dalla posizione angolare γ. Per eliminare tale dipendenza, si può trasformare secondo Park il modello, utilizzando a tale scopo la matrice canonica di Park TP(λ), ottenendo, per quanto riguarda
la matrice delle induttanze:
(
)
(
)
(
(
)
)
(
)
(
)
(
(
)
)
− + + = ′ 0 0 0 0 -p 2 cos -p 2 sin 0 -p 2 sin -p 2 cos L 2 3 0 0 0 0 1 0 0 0 1 L 2 3 1 0 0 0 1 0 0 0 1 L L 2 S S 0 L γ λ γ λ λ γ λ γ (2.18)mentre la trasformata del flusso a vuoto risulta
( )
(
(
)
)
− − Ψ = Ψ′ 0 λ pγ sin λ pγ cos 2 3 , M 0 γ λ (2.19)Prima di porre la condizione λ=pγ si deve terminare l’analisi del modello; si valutano dunque le derivata rispetto alla posizione delle espressioni precedenti
( )
( )
(
(
)
)
− − − Ψ′ = ∂ Ψ′ ∂ = ′ 0 λ pγ cos λ pγ sin p γ λ γ, λ γ, M0 0 M (2.20)(
)
( )
(
(
(
(
)
)
)
)
(
(
(
(
)
)
)
)
i 0 0 0 0 λ pγ 2 sin λ pγ 2 cos 0 λ pγ 2 cos λ pγ 2 sin L p 2 2 3 i γ λ γ, L λ γ, , i M 2 S I ′ − − − − − ⋅ = ′ ∂ ′ ∂ = ′ ′ (2.21)tramite le quali si può calcolare il wrench
È adesso possibile imporre la condizione a λ=pγ, si ottengono le seguenti espressioni del modello, in cui si elimina la dipendenza dalla posizione e, per quanto riguarda la matrice delle induttanze, gli accoppiamenti mutui, rendendola una matrice diagonale:
− + + + = ′ L S 2 S 0 L S 2 S 0 L L 0 0 0 L 2 3 L 2 3 L 0 0 0 L 2 3 L 2 3 L L (2.22)
i cui elementi sono potenzialmente tutti diversi e, in base a quanto notato precedentemente sul segno di 2ξ, si possono avere due diverse situazioni:
• Ld > Lq nel caso in cui gli assi di simmetria delle funzioni FM e ξ siano coincidenti
• Lq > Ld quando invece tali assi siano ortogonali
Il vettore delle tensioni mozionali incrementali si semplifica in
(
)
i 0 0 0 0 0 1 0 1 0 L p 2 2 3 λ γ, , i M 2 S I ′ ⋅ = ′ ′ (2.23)nella quale si nota che il termine 3p 2LS può essere interpretato anche come differenza dei termini
Il vettore dei flussi a vuoto e delle tensioni mozionali a vuoto, invece, si semplificano perché presentano un unico elemento non nullo, rispettivamente sugli assi diretto e quadratura:
( )
Ψ′ = Ψ′ 0 0 1 λ γ, M 0 (2.24)( )
Ψ′ = ′ 0 1 0 p λ γ, M0 M (2.25)I diversi elementi del modello di macchina risultano così notevolmente semplificati, e una formula altrettanto semplice è assunta anche dall’espressione con la quale si determina il wrench:
(
)
(
M q(
d q)
d q)
E i,γ,λ pΨ i L L i i
W′ ′ = ′ + − (2.26)
Questa relazione può essere utilizzata per implementare facilmente un sistema di controllo che, in base alla richiesta meccanica, fornisca il valore delle correnti di riferimento con cui alimentare il motore per soddisfare la richiesta: tali correnti di riferimento vengono calcolate nella base di Park, ma sarà poi sufficiente effettuare la trasformazione inversa per esprimerle in variabili base e confrontarle con quelle che stanno effettivamente circolando nelle fasi del motore per decidere il controllo dei tasti dell’inverter.
In particolare, la precedente espressione può essere facilmente interpretata in termini geometrici nel riferimento di Park sul piano delle correnti trasformate, osservando che se si introduce id’=id si ottiene
(
)
(
M d q d)
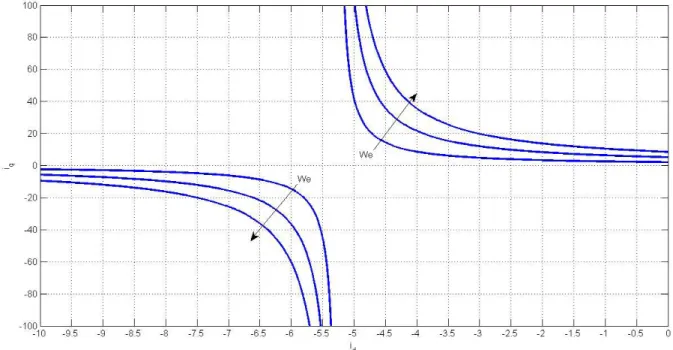
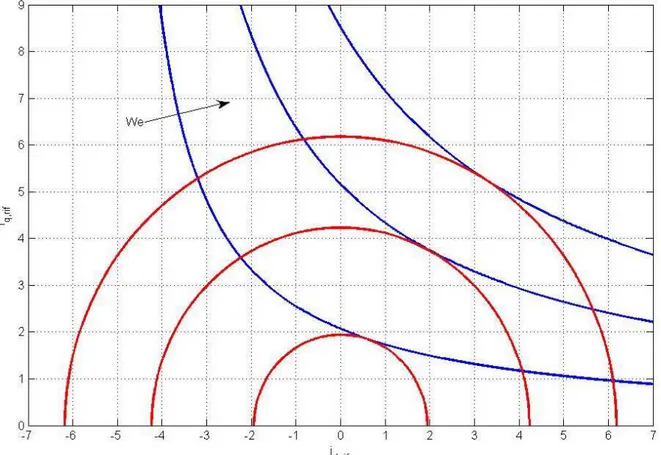
E q i L L Ψ p W i − + ′ ⋅ ′ = (2.27)Pertanto, le curve a coppia costante rappresentano su tale piano una famiglia di iperboli equilatere con asintoti corrispondenti agli assi orizzontale iq=0 e verticale id=-Ψ’M/(Ld-Lq)
Figura 2.5 – Rappresentazione grafica dell’equazione di coppia (2.26)
La figura 2.5 è stata ottenuta a partire da valori positivi di coppia; in caso di richiesta di coppia negativa l’interpretazione geometrica non cambia, è sufficiente, in base a quanto mostrato nella figura 2.5, operare una trasformazione per simmetria rispetto all’asse delle ascisse per ottenere la rappresentazione grafica dell’equazione (2.26) calcolata per coppie negative:
2 - 3
Controllo della Macchina
Funzionamento al di sotto della Velocità Base
Al di sotto della velocità base si cerca di produrre la coppia richiesta WE* minimizzando la corrente
assorbita, quindi le perdite per effetto Joule. È possibile fare questa scelta perché, per velocità Ω minori di Ωb, la tensione ai capi di macchina (prodotta in larga parte dagli effetti mozionali salvo
per bassissime velocità) è sempre inferiore a quella nominale, che a sua volta viene di norma scelta opportunamente inferiore a quella massima erogabile dal convertitore che alimenta la macchina stessa: pertanto, sino alla velocità base è di norma possibile scegliere la strategia di alimentazione della macchina senza preoccuparsi del limite di tensione.
Per rispondere a tali esigenze l’equazione di coppia e il vincolo appena definito possono essere scritte, come precedentemente visto, nel sistema di riferimento di Park, secondo il sistema
(
)
= + = ⋅ − + ⋅ = min i i iˆ i i L L p i ' ψ p ' W 2 q 2 d 2 q d q d q E M (2.28)che corrisponde a ricercare le intersezioni tra le iperboli che rappresentano le soluzioni di coppia e i cerchi che soddisfano l’equazione del modulo della corrente: in particolare, poiché la seconda equazione non fornisce un valore numerico ma solo un vincolo di minimo modulo, le id e iq con cui
alimentare la macchina per un dato valore di coppia saranno quelle che producono una circonferenza tangente all’iperbole associata a quella coppia, come mostrato nella figura seguente, nella quale spostandosi dalle curve più interne a quelle più esterne sul fascio di iperboli si trovano i valori delle correnti di riferimento calcolate per valori crescenti di coppia.
Figura 2.7 - Approssimazione sinusoidale, controllo al di sotto della velocità base
Funzionamento in Sovravelocità
In questo caso la velocità della macchina è così elevata che la tensione mozionale che si raccoglie negli avvolgimenti è paragonabile alla tensione di alimentazione della macchina, e dunque non è più possibile produrre la coppia nominale ma si deve procedere, se si vuole far operare la macchina al di sopra di Ωb, ad una riduzione della coppia massima producibile al crescere della velocità, così
da non oltrepassare il limite di tensione imposto dal sistema di alimentazione.
Tale vincolo di tensione è rappresentato dall’equazione (2.7), scritta nel riferimento di Park
q q d d q q d d MAX p ψ' L i jL i t i L j t i L iˆ R vˆ M + + ⋅ Ω + ∂ ∂ + ∂ ∂ + ⋅ = (2.29)
Dal momento che la velocità Ω è elevata, le cadute resistive sono trascurabili rispetto a quelle mozionali; in più, analizzando il funzionamento a regime della macchina, è possibile trascurare le tensioni induttive, e semplificare così il sistema da risolvere per calcolare le correnti di comando id
(
)
+ + ⋅ Ω = ⋅ − + ⋅ = q q d d MAX q d q d q E i L j i L ' ψ p vˆ i i L L p i ' ψ p ' W M M (2.30)L’equazione di tensione nella (2.30), esplicitando il calcolo dei moduli, può essere espressa anche come
(
)
( )
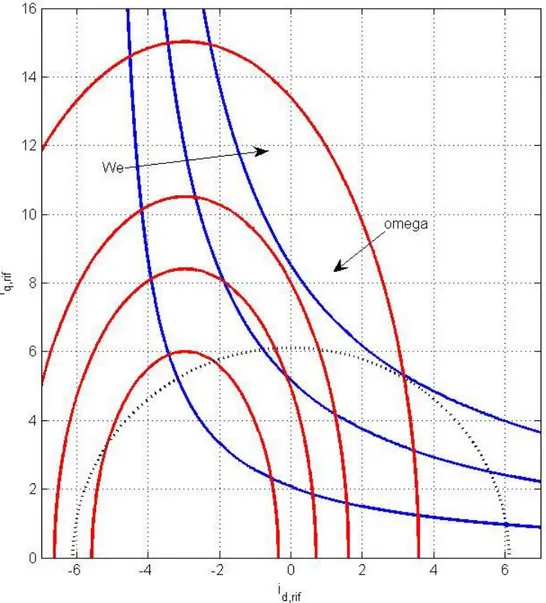
2 q q 2 d d M 2 MAX ψ L i L i p V + + ′ = Ω ′ (2.31)che è l’equazione descrittiva di un’ellisse. Dunque, le correnti id e iq con cui si alimenterà la
macchina al fine di ottenere la coppia Wrif alla velocità Ω∗ (maggiore di Ωb) sono quelle che
risultano dalla soluzione del sistema (2.8), che possono essere viste graficamente come i punti di intersezione tra l’iperbole che rappresenta l’equazione di coppia, calcolata in Wrif, e l’ellisse relativa
all’equazione di tensione valutata per Ω*; tali punti di intersezione possono essere 4, 2 o nessuno:
nel caso vi siano soluzioni reali al sistema (2.8), si sceglie quella che corrisponde alla corrente più bassa, cioè, graficamente, quella rappresentata dal punto di intersezione tra le due curve e che contemporaneamente appartiene alla circonferenza (di centro l’origine degli assi) di raggio più piccolo; qualora, invece, per la velocità di funzionamento non si abbiano soluzioni, il sistema di controllo alimenterà la macchina con la più alta coppia producibile che abbia almeno una soluzione valida.
Nella figura 2.8 le ellissi più interne del fascio sono relative ai valori più elevati di velocità, velocità che diminuisce spostandosi verso le curve più esterne. La circonferenza tratteggiata è quella corrispondente al valore massimo di corrente ammissibile per la macchina e, come si vede, risulta tangente all’iperbole più esterna (quella della massima coppia producibile).
Osservando il grafico si può notare come, al crescere della velocità, si riduca la corrente id (a fronte
di un contemporaneo aumento della iq, necessario per continuare a produrre la stessa coppia): questa
riduzione è esplicabile con la necessità di ridurre il campo magnetico di asse diretto (molto più elevato di quello di asse quadratura, per effetto dei magneti permanenti), onde mantenere costante la VEM, che come detto supponiamo in prima approssimazione essere pari alla VMAX di alimentazione.
Il contemporaneo rispetto del vincolo sulla corrente comporta necessariamente, come si vede dalla figura, la riduzione della coppia erogabile in funzione della velocità, riduzione molto maggiore di quella che si ottiene rispettando il vincolo di tensione.