Capitolo 2
Analisi del sistema Motoveicolo
2.1
Introduzione
In questo capitolo verrà analizzato il motoveicolo, considerando la geome-tria e la cinematica del sistema. Verranno introdotti sistemi di riferimento, che saranno utilizzati anche nei capitoli successivi.
2.2
Definizione cinematica
2.2.1
Parti costituenti il motoveicolo
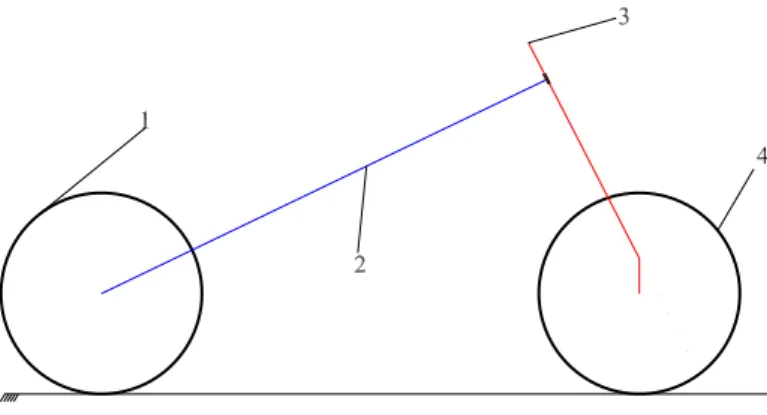
Un motoveicolo completamente assemblato è composto da molti organi distinti. Tuttavia, per un’analisi cinematica si può schematizzare il sistema come composto da quattro gruppi di parti assemblate (corpi rigidi), come si può vedere in Fig. 2.1. Per mantenere compattezza nell’esposizione, si assegnano dei nomi a questi corpi rigidi; essi sono:
1. Posteriore: fanno parte di questo corpo il pneumatico, l’apparato frenante ed il cerchio posteriori, assieme alla corona della trasmissione (in altre parole la ruota posteriore completa).
2. Mainframe: è questo il corpo costituito da più componenti; infat-ti è l’assieme di telaio, serbatoio, sovrastrutture, motore completo1
, trasmissione,. . .
1
Con motore completo si intende dotato di tutto ciò che serve per funzionare.
2.2 Definizione cinematica 11
Figura 2.1: Schema cinematico del motoveicolo
3. Avantreno: fanno parte di questo corpo la forcella completa ed il manubrio assemblato (comandi, cavi,. . . ).
4. Anteriore: esso è costituito da pneumatico, cerchio e dischi freno anteriori (in altri termini è la ruota anteriore completa).
Questa schematizzazione è valida solo se si considerano le sospensioni rigide; altrimenti si dovrebbero introdurre due sconnessioni:
• L’ avantreno dovrebbe essere suddiviso in due parti, una superiore ed una inferiore collegate da una guida prismatica, in modo da schematiz-zare la forcella.
• Il posteriore non sarebbe direttamente collegato al mainframe, bensì sarebbe opportuno introdurre tra di essi il forcellone, collegato con una due coppie cilindriche.
2.2.2
Vincoli
Trascurando per il momento le sospensioni si può ritenere di descrivere i vincoli fra i corpi precedentemente descritti come facenti parte di due categorie:
• Coppie rotoidali che inibiscono 5 g.d.l., lasciando la possibilità di rotazione attorno ad un asse.
2.3 Definizione del baricentro 12
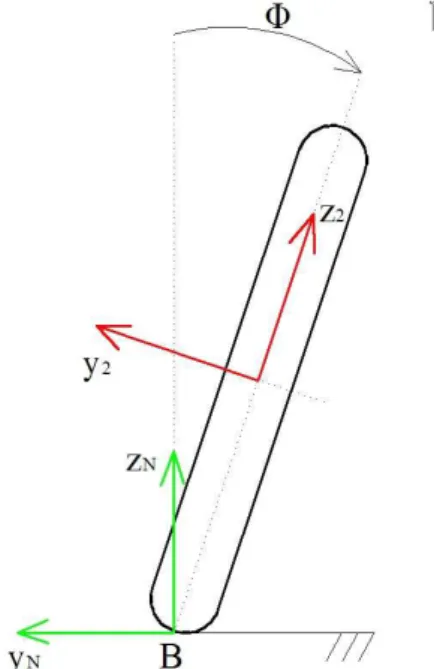
• Vincoli pneumatico-strada che inibiscono 3 g.d.l., le tre traslazioni, se si ipotizza che il pneumatico rotoli senza strisciare sulla strada (vd. Fig. 2.2).
Figura 2.2: Possibili rotazioni della ruota
Considerando nullo lo scorrimento longitudinale, che interviene nel contatto pneumatico/strada, i g.d.l. risultano essere 5; essi saranno definiti nella sezione (2.5).
2.3
Definizione del baricentro
Il motoveicolo precedentemente schematizzato, può essere visto come un insieme di masse principali, a loro volta costituite da corpi rigidi colle-gati rigidamente. Con riferimento alla Fig. 2.3, si sono fatte le seguenti assunzioni:
• P rappresenta il baricentro della parte posteriore della moto, definita come in (2.2).
• R rappresenta il baricentro della parte superiore del corpo del pilota (dorso, braccia, testa,. . . ).
• M rappresenta il baricentro del mainframe, definito come in (2.2), con l’aggiunta della parte inferiore del pilota (bacino e gambe).
• B rappresenta il baricentro di un ballast, zavorra mobile utilizzata nelle moto sportive, grazie alla quale nelle competizioni è possibile
raggiun-2.3 Definizione del baricentro 13
Figura 2.3: Schematizzazione delle masse principali del motoveicolo
gere il peso limite e variare la posizione del baricentro complessivo G.
• F rappresenta il baricentro della parte anteriore del motoveicolo, defini-ta come in (2.2).
Se si assume che la configurazione in Fig. 2.3 sia rigida, si ottiene: h = mPhP + mRhR+ mMhM + mBhB+ mFhF m b = mPbP + mRbR+ mMbM + mBbB+ mFbF m a = l − b (2.1) Dove: • m = mP + mR+ mM + mB+ mF
• l è il passo del veicolo
• a e b sono rispettivamente i semipassi anteriore e posteriore
Se si considerano P, B, R collegati rigidamente ad M, si ha una situazione come quella descritta in (2.2); questa ipotesi porta a trascurare i moti rela-tivi fra pilota e veicolo (principalmente tipo rollio) e, soprattutto elimina la
2.4 Geometria del motociclo 14
presenza cinematica della sospensione posteriore.
ef rappresenta la distanza del baricentro dell’anteriore F dall’asse di
ster-zo (vd. Fig. 2.3). Se ef ≈ 02, significa che il baricentro dell’anteriore è
posizionato sull’asse di sterzo; questo ha come conseguenza il fatto che la posizione relativa del baricentro complessivo del veicolo è invariante rispetto al moto di rotazione dello sterzo.
2.4
Geometria del motociclo
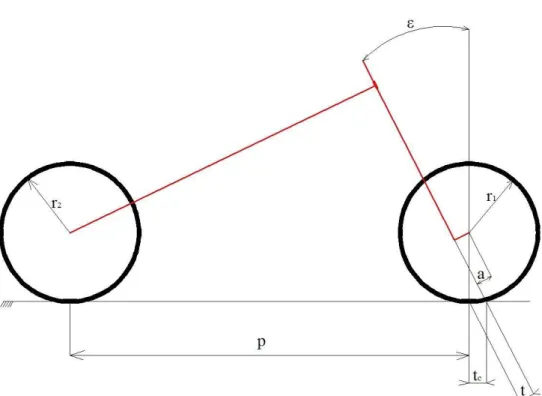
Figura 2.4: Geometria del motociclo
Le grandezze geometriche riportate in Fig. 2.4 sono comunemente uti-lizzate per descrivere la configurazione ciclistica del motociclo; esse sono misurate con il veicolo in posizione verticale3
, con angolo di sterzata nullo.
• p è il passo, definito come la distanza fra i punti di contatto delle ruote a terra.
2
Nel capitolo (4) si vedrà che, per gli scopi del presente lavoro, questa ipotesi può ritenersi valida.
3
2.4 Geometria del motociclo 15
• r1 e r2 sono rispettivamente i raggi esterni delle ruote anteriore e
posteriore, in configurazione indeformata.
• a è l’avanzamento , distanza fra l’asse di sterzo e la parallela ad esso passante per il centro ruota.
• ǫ è l’angolo di inclinazione dell’asse di sterzo, definito come l’angolo che esiste fra la verticale al suolo e l’asse di sterzo (rappresentato in Fig. 2.4).
• tc è l’avancorsa, definita come la distanza fra l’intersezione dell’asse di
sterzo con il piano stradale ed il punto di contatto della ruota anteriore, misurata sul piano stradale, definita in Fig. 2.4.
• t è l’avancorsa normale.
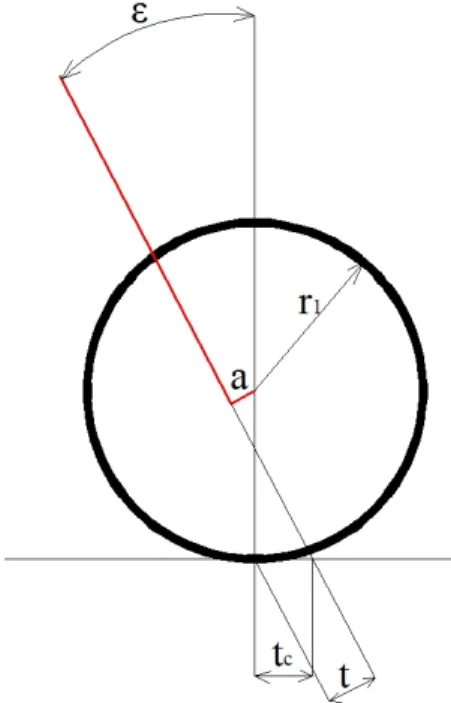
Figura 2.5: Quote ciclistiche anteriori
In Fig. 2.5 è rappresentato il dettaglio dell’anteriore, con una configurazione comune. Valgono le seguenti relazioni:
t = r1sin ǫ − a (2.2)
tc =
t
2.5 Sistemi di riferimento 16
2.5
Sistemi di riferimento
In questo capitolo verranno definiti i sistemi di riferimento, che saranno utilizzati per le successive considerazioni e per la formulazione delle equazioni dei modelli analitici di motociclo. In Fig. 2.6 è visibile il sistema di rife-rimento solidale alla strada (xO, yO, zO), con l’asse verticale zO diretto verso
l’alto, di versori (iO, jO, kO). La direzione verticale è determinata da quella
della forza peso; ai fini dell’analisi che seguirà, questo sistema di riferimento può essere considerato inerziale (per chiarimenti vd. [1]).
Figura 2.6: Definizione deli assi suolo
2.5.1
Sistemi solidali al motoveicolo
Si introduce un sistema di riferimento (xN, yN, zN) (Fig. 2.7) con
ori-gine nel punto N, che rappresenta la proiezione a terra del baricentro G del motoveicolo quando l’angolo di rollio e quello di sterzo assumono valore nullo (Fig. 2.8). Il piano su cui giacciono gli assi xN− yN coincide con quello degli
assi xO− yO; di conseguenza l’asse zN è diretto come zO. Questo sistema di
riferimento può essere ottenuto mediante una rotazione attorno all’asse zO
del sistema (xO, yO, zO), dell’angolo ψ, detto angolo d’imbardata:
(iO, jO, kO) ψ
2.5 Sistemi di riferimento 17
Figura 2.7: Definizione del sistema N
Supponendo di poter ritenere valida l’ipotesi che ef ≈ 0, si introduce
un sistema di riferimento di assi corpo (xG, yG, zG) (Fig. 2.8) con origine
nel baricentro G del motoveicolo. Questo può essere ottenuto mediante una rotazione attorno all’asse xN del sistema (xN, yN, zN), dell’angolo φ, detto
angolo di rollio:
(iN, jN, kN) φ
→ (iG, jG, kG) (2.5)
Questo sistema di riferimento non è la terna centrale d’inerzia del motoveico-lo; tuttavia, se si assume che la moto si simmetrica rispetto al piano xG− zG,
si ha che Ixy = Iyz = 0, mentre Ixz 6= 0. Rispetto a questo sistema i momenti
ed i prodotti d’inerzia sono costanti durante il moto.
Figura 2.8: Definizione del sistema G
2.5 Sistemi di riferimento 18
per il calcolo dell’energia cinetica nel capitolo 4.
Si introduce un sistema di riferimento di (x2, y2, z2) con origine nel centro
della ruota posteriore (Fig. 2.9). Questo sistema possiede gli stessi versori di (xG, yG, zG):
(iN, jN, kN) φ
→ (iG, jG, kG) (2.6)
Questo non è un sistema di assi corpo per la ruota posteriore, infatti, per
Figura 2.9: Definizione del sistema posteriore
essere tale dovrebbe rimanere solidale alla ruota in tutti i suoi movimenti. Il sistema (x2, y2, z2), invece non segue la ruota durante la rotazione attorno
all’asse y2 (assimilabile ad un moto di beccheggio). Tuttavia, sfruttando le
proprietà di simmetria della ruota, si può asserire che il sistema di riferimen-to introdotriferimen-to conserva la proprietà precedentemente enunciata per gli assi corpo.
Si introduce un sistema di riferimento di (xE, yE, zE) con origine sul
nel-l’intersezione tra il piano di simmetria del veicolo e l’albero motore (Fig. 2.10). Questo sistema possiede gli stessi versori di (xG, yG, zG):
(iN, jN, kN) φ
2.5 Sistemi di riferimento 19
Figura 2.10: Definizione del sistema propulsore
Questo è un sistema di assi corpo; possiede quindi le proprietà precedente-mente elencate.
2.5.2
Anteriore
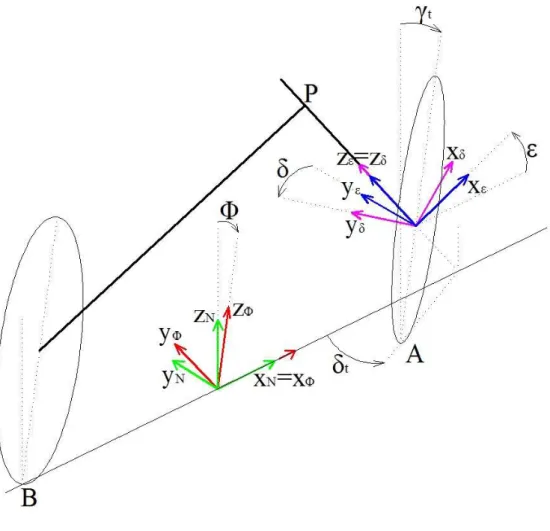
Per descrivere quantità cinematiche riguardanti l’anteriore del motovei-colo si indica una serie di rotazioni con i rispettivi sistemi di riferimento (Fig. 2.11): (iN, jN, kN) φ →¡iφ, jφ, kφ ¢ ǫ → (iǫ, jǫ, kǫ) δ → (iδ, jδ, kδ) (2.8)
Il sistema (xφ, yφ, zφ) può essere ottenuto mediante una rotazione attorno
all’asse xN del sistema (xN, yN, zN), dell’angolo φ, detto angolo di rollio. Il
sistema (xǫ, yǫ, zǫ) può essere ottenuto mediante una rotazione attorno
al-l’asse yΦ del sistema (xφ, yφ, zφ), dell’angolo ǫ, detto angolo di inclinazione
dell’asse di sterzo. Il sistema (xδ, yδ, zδ) può essere ottenuto mediante una
rotazione attorno all’asse zǫdel sistema (xǫ, yǫ, zǫ), dell’angolo δ, detto angolo
di rotazione di sterzo.
Il sistema (xδ, yδ, zδ) non può essere considerato un sistema di assi corpo per
la ruota anteriore, ma lo è per l’avantreno, definito nella sezione (2.2). Qualora servissero altri sistemi di riferimento, saranno definiti all’occorrenza.
2.6 Cinematica dell’anteriore 20
Figura 2.11: Sistemi di utilizzati per l’anteriore
2.6
Cinematica dell’anteriore
Per descrivere il comportamento cinematico dell’anteriore durante il moto si farà riferimento alla Fig. 2.11. Con un approccio simile a quello proposto in [2], si considera un vettore s diretto come l’asse di rotazione della ruota anteriore. Nel sistema di riferimento (xδ, yδ, zδ) questo vettore si esprime
come:
2.6 Cinematica dell’anteriore 21
Mediante tre rotazioni semplici4
successive si determinano le componenti di snel sistema (xN, yN, zN): s= 0 1 0 cos δ − sin δ 0 sin δ cos δ 0 0 0 1 cos ǫ 0 sin ǫ 0 1 0 − sin ǫ 0 cos ǫ 1 0 0 0 cos φ − sin φ 0 sin φ cos φ Si ottiene: s= (− sin δ cos ǫ) iN+
+ (cos φ cos δ − sin φ sin δ sin ǫ) jN+
+ (sin φ cos δ + cos φ sin δ sin ǫ) kN =
= sxiN + syjN + szkN
(2.10)
Se si può ipotizzare che gli angoli di sterzo rimangano piccoli5
: s= (δ cos ǫ) iN+
+ (cos φ − δ sin φ sin ǫ) jN+
+ (sin φ + δ cos φ sin ǫ) kN
(2.11)
2.6.1
Angolo di sterzo effettivo
Per come è stato definito in precedenza, l’angolo di sterzo6
, rappresenta l’angolo del quale ruotare il sistema di riferimento (xǫ, yǫ, zǫ) attorno all’asse
zǫ, per passare al sistema (xδ, yδ, zδ). L’angolo di sterzo a terra,o effettivo,
viene definito come l’angolo esistente fra l’asse xN e l’intersezione fra il piano
xδ− zδ e quello xN− yN; con altre parole, l’angolo di sterzo effettivo è quello
formato dalle intersezioni del piano mediano della ruota anteriore e di quello del mainframe con il piano stradale.
Se si ipotizza che le ruote siano lenticolari, cioè assimilabili a dischi di spessore trascurabile, la relazione che esprime l’angolo di sterzo a terra si può ricavare da (2.10), infatti (Fig. 2.11): δt = arctan µ −sx sy ¶ = = arctan µ sin δ cos ǫ
cos φ cos δ − sin φ sin δ sin ǫ
¶ (2.12)
4
La rotazione semplice è rispetto ad un asse coordinato; così facendo, due terne successive hanno sempre una direzione in comune.
5
sinδ≈ δ e cos δ ≈ 1.
6
2.6 Cinematica dell’anteriore 22
Nel caso di piccoli angoli di sterzo si ha che:
δt=
δ cos ǫ
cos φ − δ sin φ sin ǫ (2.13) è opportuno osservare che l’angolo di sterzo δ è l’unico fra quelli che com-paiono nella relazione (2.12) che si presta all’uso dell’ipotesi dei piccoli angoli (sin δ ≈ δ, cos δ ≈ 1). Infatti, l’angolo di inclinazione dell’asse di sterzo ǫ è un parametro, che di norma assume valori compresi fra −20◦e −30◦. L’angolo di
rollio può assumere valori prossimi a ±50◦, soprattutto in manovre
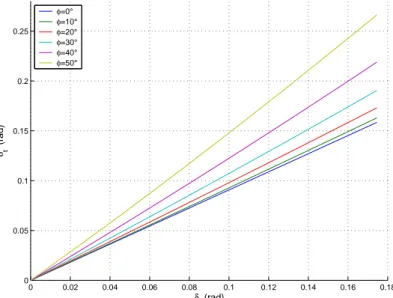
impegna-tive. Nelle Fig. 2.12 e 2.13, sono rappresentati gli andamenti dell’angolo di sterzo effettivo δt, al variare rispettivamente dell’angolo di sterzo imposto δ
e dell’angolo di rollio φ, tenendo di volta in volta gli altri valori costanti. É stato scelto un angolo di inclinazione dell’asse di sterzo ǫ = −25◦, valore
ac-cettabile per molti motoveicoli stradali in produzione. Nella Fig. 2.14, sono rappresentati gli andamenti della differenza fra angolo di sterzo effettivo δt e
quello di sterzo δ al variare rispettivamente dell’angolo di sterzo imposto δ e dell’angolo di rollio φ, tenendo di volta in volta gli altri valori costanti. In Fig. 2.14 si può osservare come il valore di φ influenzi l’andamento di δt al
variare di δ; a parità di angolo di sterzo imposto, all’aumentare dell’angolo di rollio, la differenza (δt− δ) passa da negativa a positiva. In Fig. 2.15 è
rappresentata la differenza fra i valori di δt ricavati dalla relazione (2.12) e
quelli ottenuti per piccoli angoli di sterzo (relazione (2.13)). É opportuno mettere in evidenza come, anche in condizioni che vanno oltre quelle di un utilizzo sportivo del motoveicolo (δ = 10◦ e φ > 50◦), l’errore commesso
con-siderando piccolo l’angolo di sterzo risulti nell’ordine del decimo di grado; pertanto, nella formulazione di modelli che necesssitano dell’angolo di sterzo effettivo, si utilizzerà la (2.13).
In seguito sarà utilizzata la derivata temporale dell’angolo di sterzo effet-tivo; risulta opportuno calcolarla:
˙δt=
˙δ cos ǫ(cos φ − δ sin φ sin ǫ) (cos φ − δ sin φ sin ǫ)2 +
+ δ cos ǫ( ˙φ sin φ + ˙δ sin φ sin ǫ + δ ˙φ cos φ sin ǫ) (cos φ − δ sin φ sin ǫ)2 =
= Aδ˙δ + Bδφ˙
2.6 Cinematica dell’anteriore 23 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0 0.05 0.1 0.15 0.2 0.25 δt (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50°
Figura 2.12: δt in funzione di δ, per ǫ = −25◦
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0 0.05 0.1 0.15 0.2 0.25 δt (rad) φ (rad) δ=10° δ=5° δ=0°
Figura 2.13: δt in funzione di φ, per ǫ = −25◦
Dove:
Aδ =
cos φ cos ǫ (cos φ − δ sin φ sin ǫ)2
Bδ =
δ sin φ cos ǫ + δ2
cos φ sin ǫ cos ǫ (cos φ − δ sin φ sin ǫ)2
2.6 Cinematica dell’anteriore 24 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 −0.02 0 0.02 0.04 0.06 0.08 0.1 δt − δ (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50° 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 −0.02 −0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 ( δt − δ ) (rad) φ (rad) δ=5° δ=10° δ=0° Figura 2.14: (δt− δ), per ǫ = −25◦ 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5x 10 −3 (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50° 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 −2.5 −2 −1.5 −1 −0.5 0 0.5x 10 −3 (rad) φ (rad) δ=10° δ=5° δ=0°
Figura 2.15: Differenza fra δt completo e quello ricavato per piccoli δ, per
ǫ = −25◦
2.6.2
Angolo di rollio dell’anteriore
Si definisce angolo di rollio anteriore γt quello fra il piano xδ− zδ ed il
piano xN − yN. Se si ipotizza che le ruote siano lenticolari, cioè assimilabili
a dischi di spessore trascurabile, la relazione che esprime l’angolo di rollio dell’anteriore si può ricavare da (2.10), infatti (Fig. 2.11):
γt = arcsin (sz) =
= arcsin (sin φ cos δ + cos φ sin δ sin ǫ) (2.15) Nel caso di piccoli angoli di sterzo si ha che:
γt = sin φ + δ cos φ sin ǫ (2.16)
Nelle Fig. 2.16 e 2.17, sono rappresentati gli andamenti dell’angolo di rol-lio anteriore γt, al variare rispettivamente dell’angolo di sterzo imposto δ e
2.6 Cinematica dell’anteriore 25
dell’angolo di rollio φ, tenendo di volta in volta gli altri valori costanti.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 γt (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50°
Figura 2.16: γt in funzione di δ, per ǫ = −25◦
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 γt (rad) φ (rad) δ=0° δ=5° δ=10°
Figura 2.17: γt in funzione di φ, per ǫ = −25◦
Nella Fig. 2.18, sono rappresentati gli andamenti della differenza fra angolo di rollio anteriore γt e quello di rollio φ al variare rispettivamente dell’angolo
di sterzo imposto δ e dell’angolo di rollio φ, tenendo di volta in volta gli altri valori costanti.
2.6 Cinematica dell’anteriore 26
relazione (2.15) e quelli ottenuti considerando piccoli gli angoli di sterzo (relazione (2.16)). 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 −0.09 −0.08 −0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 0 γt − φ (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50° 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 −0.09 −0.08 −0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 0 γt − φ (rad) φ (rad) δ=0° δ=5° δ=10° Figura 2.18: (γt− φ), per ǫ = −25◦ 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 −0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 (rad) δ (rad) φ=0° φ=10° φ=20° φ=30° φ=40° φ=50° 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 −0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 (rad) φ (rad) δ=0° δ=5° δ=10°
Figura 2.19: Differenza fra γt completo e quello ricavato per piccoli δ, per
2.7 Le ruote 27
2.7
Le ruote
Nelle sezioni (2.6.1) e (2.6.2) sono state considerate le ruote come dischi rigidi di spessore trascurabile con raggio esterno pari al raggio di rotolamen-to7
; è invalso l’uso della definizione di lenticolari per questo tipo di schema-tizzazione di ruote. Tuttavia, questa ipotesi porta a trascurare alcuni effetti che la reale forma del pneumatico genera.
In questa sezione verranno schematizzate le ruote come toroidi di raggio medio R e raggio della sezione r. Verrà trascurata l’elasticità della gomma e si studieranno due effetti dovuti al moto di rollio. La situazione è rappre-sentata nelle Fig. 2.20 e 2.21.
Figura 2.20: Vista posteriore
Se il veicolo assume un angolo di rollio φ, definito come in (2.5), il punto di contatto a terra si sposta della quantità |CC′′| (Fig. 2.21). Si ha che:
|C′′C′| = 2r sinµ φ 2 ¶ |C′′K| = r sin φ |C′K| = r(1 − cos φ) |C′C| = r(1 − cos φ) cos φ |CK| = r(1 − cos φ) tan φ (2.17) 7
In condizioni di puro rotolamento, poiché la ruota viene considerata rigida, esso è il raggio della ruota stessa.
2.7 Le ruote 28
Figura 2.21: Ruota posteriore in dettaglio
2.7.1
Variazione del punto di contatto a terra dovuta al
moto di rollio
Con riferimento alle relazioni (2.17), si ottiene che lo spostamento del punto di contatto a terra della ruota, dovuto ad un angolo di rollio φ vale:
|CC′′| = |CK| + |KC′′| = r tan φ (2.18)
In Fig. 2.22 è mostrato l’andamento della variazione del punto di contatto a terra per entrambe le ruote.
E’ opportuno mettere in evidenza che, soprattutto per angoli di rollio φ elevati, lo spostamento della ruota con minor raggio della sezione, a parità del raggio medio del toroide, sia inferiore rispetto a quella di maggior sezione8
. In queste condizioni insorge il fenomeno di imbardata dovuto alle diverse dimensioni delle sezioni dei toroidi.
8
2.8 Analisi cinematica 29 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0 10 20 30 40 50 60 CC’’ (mm) φ (rad) Posteriore Anteriore
Figura 2.22: Variazione del punto di contatto a terra per entrambe le ruote
2.7.2
Variazione dell’altezza del baricentro dovuta al
moto di rollio
Con riferimento alle relazioni (2.17), si ottiene che la variazione dell’al-tezza del baricentro G del veicolo, misurata sul piano xG− zG9, dovuta ad
un angolo di rollio φ vale:
|CC′| = r1 − cos φ
cos φ (2.19)
Con r si è indicato il raggio medio delle due sezioni dei toroidi, ottenuto come media pesata sui semipassi:
r = r1 b l + r2 a l (2.20)
2.8
Analisi cinematica
Tenendo presenti i sistemi di riferimento introdotti nella sezione (2.5), verrà svolta di seguito l’analisi delle velocità dei corpi introdotti in (2.2) ed
9
Si intende la differenza fra l’altezza del baricentro del veicolo nel caso di ruote toroidali e lenticolari, misurata sul piano mediano longitudinale del veicolo stesso.
2.8 Analisi cinematica 30 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0 5 10 15 20 25 ∆ h (mm) φ (rad)
Figura 2.23: Variazione dell’altezza del baricentro dovuta al rollio
in (2.3).
La velocità del punto N vale:
vN = u0i0+ v0j0 = uNiN+ vNjN
La relazione fra le due espressioni della velocità del punto N è quella fra i due sistemi di versori in cui è stata espressa:
" uN vN # = " cos ψ sin ψ − sin ψ cos ψ # " uO vO # (2.21)
La rotazione dell’angolo ψ attorno all’asse suolo kO, viene chiamato
imbar-data ed è stato definito in (2.5).
2.8.1
Velocità del baricentro
Volendo conoscere la velocità del baricentro G, è opportuno ricordare la formula fondamentale della cinematica piana:
vG = vN + Ω ∧ ~N G (2.22)
Dove:
2.8 Analisi cinematica 31
• ~N G = (−h sin φ)jN + (h cos φ)kN
• vN = uNiN + vNjN
Tenendo presente che iN0 = i0, la velocità angolare Ω si esprime come:
Ω = ˙φiN + ˙ψkN (2.23)
Dalla relazione (2.22) si ricava quindi la velocità del baricentro G:
vG= ³ uN + ˙ψh sin φ ´ iN+ +³vN − ˙φh cos φ ´ jN+ −³ ˙φh sin φ´kN (2.24)
La velocità angolare Ω può essere espressa nel sistema di riferimento bari-centrale (xG, yG, zG) dalle componenti (p, q, r), tenendo presenti le rotazioni
elementari10
per passare attraverso i vari sistemi, in cui si sono trovate le singole componenti. p q r = 1 0 0 0 cos φ sin φ 0 − sin φ cos φ ˙ φ 0 ˙ ψ = ˙ φ ˙ ψ sin φ ˙ ψ cos φ (2.25) Si ottiene:
Ω = ˙φiG+ ( ˙ψ sin φ)jG+ ( ˙ψ cos φ)kG
In [6] si forniscono le seguenti definizioni: • p è la velocità di rollio
• q è la velocità di beccheggio • r è la velocità di imbardata
2.8.2
Velocità di rotazione della ruota posteriore
Considerando la Fig. 2.9, si vuole esprimere la velocità di rotazione Ω2 della ruota posteriore nel sistema di riferimento (x2, y2, z2). Per far
questo si possono considerare separatamente due effetti ed unirli per ottenere l’espressione finale:
10
2.8 Analisi cinematica 32
• Ω2t rappresenta il vettore di velocità di rotazione della ruota
poste-riore, considerata solidale rispetto al mainframe; essa è la velocità di trascinamento.
• Ω2r rappresenta il vettore di velocità di rotazione relativa fra ruota
posteriore e motoveicolo.
Con ragionamenti analoghi a quelli svolti nella sezione precedente si ha che:
Ω2t = ˙φiG+ ( ˙ψ sin φ)jG+ ( ˙ψ cos φ)kG (2.26)
Ω2r= µ uN r2 ¶ jG (2.27) Si ottiene quindi: Ω2 = Ω2t+ Ω2r = = p2iG+ q2jG+ r2kG= = ˙φiG+ µ ˙ ψ sin φ +uN r2 ¶ jG+ ( ˙ψ cos φ)kG (2.28)
2.8.3
Velocità di rotazione del sistema motore
Considerando la Fig. 2.10, si vuole esprimere la velocità di rotazione ΩE
del sistema motore, schematizzato come un volano, nel sistema di riferimento (xE, yE, zE). Per far questo si possono considerare separatamente due effetti
ed unirli per ottenere l’espressione finale:
• ΩEt rappresenta il vettore di velocità di rotazione del motore,
conside-rato solidale rispetto al mainframe; essa è la velocità di trascinamento.
• ΩEr rappresenta il vettore di velocità di rotazione relativa fra motore
e motoveicolo.
Con ragionamenti analoghi a quelli svolti nella sezione (2.8.1) si ha che:
ΩEt = ˙φiG+ ( ˙ψ sin φ)jG+ ( ˙ψ cos φ)kG (2.29)
2.8 Analisi cinematica 33
Dove τ rappresenta il rapporto fra il regime di rotazione del motore ed uN.
Si ottiene quindi: ΩE = ΩEt+ ΩEr = = pEiG+ qEjG+ rEkG= = ˙φiG+³ ˙ψ sin φ + uNτ ´ jG+ ( ˙ψ cos φ)kG (2.31)
2.8.4
Velocità dell’anteriore
Considerando la Fig. 2.11, si vuole trovare la velocità di rotazione dell’ante-riore, definito nella sezione (2.2). Si ricorda che il sistema di riferimento (xδ, yδ, zδ), è stato ottenuto dalla (2.8), mediante le rotazioni semplici:
(iN, jN, kN) φ →¡iφ, jφ, kφ ¢ ǫ → (iǫ, jǫ, kǫ) δ → (iδ, jδ, kδ)
Per far questo si possono considerare separatamente due effetti ed unirli per ottenere l’espressione finale:
• ΩP t rappresenta il vettore di velocità di rotazione del punto P,
conside-rato solidale al mainframe.
• ΩP rrappresenta il vettore di velocità di rotazione relativa fra l’anteriore
ed il mainframe. ΩP t = pP tiδ+ qP tjδ+ rP tkδ pP t qP t rP t = cos δ sin δ 0 − sin δ cos δ 0 0 0 1 cos ǫ 0 − sin ǫ 0 1 0 sin ǫ 0 cos ǫ 1 0 0 0 cos φ sin φ 0 − sin φ cos φ ˙ φ 0 ˙ ψ Si ottiene: pP t qP t rP t = ˙
φ cos ǫ cos δ − ˙ψ cos φ sin ǫ cos δ + ˙ψ sin φ sin δ − ˙φ cos ǫ sin δ + ˙φ cos φ sin ǫ sin δ + ˙ψ sin φ cos δ
˙
φ sin ǫ + ˙ψ cos φ cos ǫ
(2.32) ΩP r = ˙δiδ (2.33)
Sommando i due contributi:
2.8 Analisi cinematica 34 pP qP rP = ˙
φ cos ǫ cos δ − ˙ψ cos φ sin ǫ cos δ + ˙ψ sin φ sin δ − ˙φ cos ǫ sin δ + ˙φ cos φ sin ǫ sin δ + ˙ψ sin φ cos δ
˙
φ sin ǫ + ˙ψ cos φ cos ǫ + ˙δ
(2.34)
Se si ipotizza di poter ritenere piccoli gli angoli di sterzo11
, si può ritenere valida la seguente espressione:
pP qP rP ≈ ˙
φ cos ǫ − ˙ψ cos φ sin ǫ + ˙ψ sin φδ − ˙φ cos ǫδ + ˙φ cos φ sin ǫδ + ˙ψ sin φ
˙
φ sin ǫ + ˙ψ cos φ cos ǫ + ˙δ
(2.35)
2.8.5
Velocità angolare della ruota anteriore
Considerando la Fig. 2.11, si vuole esprimere la velocità di rotazione Ω1
della ruota anteriore. Per far questo si possono considerare separatamente due effetti ed unirli per ottenere l’espressione finale:
• Ω1trappresenta il vettore di velocità di rotazione della ruota anteriore,
considerata solidale rispetto all’anteriore.
• Ω1r rappresenta il vettore di velocità di rotazione relativa fra ruota
anteriore e l’anteriore.
La velocità Ω1t è analoga alla (2.32). La velocità Ω1r vale:
Ω1r=
µ uN
r1
¶
jδ (2.36)
Sommando i due conributi:
Ω1 = Ω1t+ Ω1r = p1iδ+ q1jδ+ r1kδ p1 q1 r1 = ˙
φ cos ǫ cos δ − ˙ψ cos φ sin ǫ cos δ + ˙ψ sin φ sin δ − ˙φ cos ǫ sin δ + ˙φ cos φ sin ǫ sin δ + ˙ψ sin φ cos δ + uN/r1
˙
φ sin ǫ + ˙ψ cos φ cos ǫ + ˙δ
(2.37)
Anche in questo caso, se si ipotizzano piccoli angoli di sterzo: p1 q1 r1 ≈ ˙
φ cos ǫ − ˙ψ cos φ sin ǫ + ˙ψ sin φδ − ˙φ cos ǫδ + ˙φ cos φ sin ǫδ + ˙ψ sin φ + uN/r1
˙
φ sin ǫ + ˙ψ cos φ cos ǫ + ˙δ
(2.38) 11sin δ≈ δ, cos δ ≈ 1.
2.9 Angoli di deriva 35
2.9
Angoli di deriva
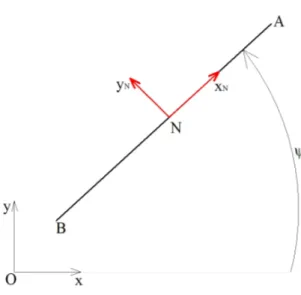
Figura 2.24: Convenzione sul segno dell’angolo di deriva
Con riferimento alla Fig. 2.24, si definisce angolo di deriva l’angolo fra l’asse x12
e la velocità di avanzamento. Per gli angoli di deriva, si è scelto di seguire la convenzione ISO, in quanto non necessita di introdurre eccezioni ai segni ed è coerente con i sistemi di riferimento introdotti in (2.5).
2.9.1
Angolo di deriva posteriore
Per la ruota posteriore (Fig. 2.25), la velocità di avanzamento v2 può
essere trovata sfruttando la formula fondamentale della cinematica piana:
v2 = vN + ˙ψkN ∧ ~N 2 = u2iN+ v2jN (2.39) Si ottiene: " u2 v2 # = " uN vN − b ˙ψ # (2.40)
L’angolo di deriva posteriore è il seguente:
α2 = arctan à vn− b ˙ψ uN ! ≈ vn− b ˙ψ uN (2.41)
Dove l’ultima uguaglianza può essere considerata valida solo nel caso di piccoli angoli.
12
2.9 Angoli di deriva 36
Figura 2.25: Angoli di deriva nel caso di avancorsa nulla
2.9.2
Angolo di deriva anteriore
Se si ipotizza che il punto di contatto a terra della ruota anteriore coincida con l’intersezione fra l’asse di sterzo ed il piano stradale (avancorsa nulla), il calcolo dell’angolo di deriva anteriore può essere svolto in maniera simile a quello per il posteriore, facendo attenzione ad inserire l’angolo di sterzo (Fig. 2.25): v1 = vN + ˙ψkN ∧ ~N 1 = u1i1+ v1j1 (2.42) " u1 v1 # = " uN vN + a ˙ψ # (2.43) α1 = −δ + arctan à vn+ a ˙ψ uN ! (2.44)
Dove δ è l’angolo di sterzo. Volendo essere più precisi, al posto di δ sarebbe opportuno inserire l’angolo di sterzo effettivo δt (sezione (2.6.1)).
In realtà, se si considera la presenza dell’avancorsa, l’approccio da seguire per calcolare l’angolo di deriva anteriore è un altro. Infatti, come si può osservare in Fig. 2.26, il punto di contatto a terra del pneumatico non coincide con l’intersezione fra l’asse di sterzo ed il piano stradale. La velocità di avanzamento del punto di contatto si calcola applicando due volte la formula
2.9 Angoli di deriva 37
fondamentale della cinematica piana:
v3 = vN + ˙ψkN ∧ ~N 3
v1 = v3+ ˙δtkN ∧ ~31
Dove:
• ~N 3 = aiN è l’espressione vettoriale del semipasso anteriore;
• ~31 = −tccos δtiN − tcsin δtjN;
• 3 è l’intersezione fra l’asse di sterzo ed il piano stradale; • 1 è il punto di contatto a terra del pneumatico anteriore. Si ottiene: " u1 v1 # = " uN − ˙δttcsin δt vN + a ˙ψ + ˙δttccos δt # (2.45) α1 = −δt+ arctan à vn+ a ˙ψ + ˙δttccos δt uN − ˙δttcsin δt ! ≈ ≈ −δt+ vn+ a ˙ψ + ˙δttccos δt uN − ˙δttcsin δt (2.46)
Dove l’ultima uguaglianza può essere considerata valida solo nel caso di pic-coli angoli. Considerando la differenza fra punto di contatto a terra
del-Figura 2.26: Angolo di deriva anteriore completo
la ruota ed intersezione dell’asse di sterzo con il piano stradale, si calcola con maggior precisione l’angolo di deriva anteriore, a spese di una modes-ta complicazione. Permodes-tanto, nel modello più complesso di motoveicolo, sarà utilizzata la relazione (2.46).