Indice
1 Introduzione ... 6
2 Elementi di Fisiologia articolare ... 7
2.1 Introduzione... 7
2.2 Il complesso articolare del piede: la caviglia... 7
2.2.1 Movimento di flesso-estensione... 9
2.2.2 I movimenti di rotazione longitudinale e di lateralità del piede. ... 10
2.2.3 Movimento di adduzione ed abduzione... 10
2.2.4 Movimento di pronazione e supinazione... 11
2.3 Il movimento della caviglia come composizione di movimenti elementari... 11
2.4 Conclusione ... 12
3 La pedana TreT3... 14
3.1 La Necessità... 14
3.2 Lo stato dell’arte ... 15
3.2.1 La pedana TCC1... 16
3.3 La scelta della macchina dissipativa ... 18
3.3.2 La scelta dei freni magnetoreologici ... 18
3.4 Necessità conseguenti alla natura passiva della macchina... 19
3.4.3 Trasparenza all’azione dell’utente ... 19
3.4.4 La riduzione del peso... 19
3.4.5 Le disposizione delle masse... 20
3.4.6 La cinematica e i centri di rotazione in relazione alla fisiologia ... 20
3.4.7 L’interfaccia fisica... 21
3.4.8 Sicurezza “intrinseca”... 21
3.5 Caratteristiche principali della TreT3 ... 21
4 Le frizioni magnetoreologiche ... 23 4.1 Introduzione... 23 4.2 I fluidi MRF-240BS... 24 4.3 Freni o Frizioni ?... 24 5 Fluidi MR ... 25 5.1 Generalità ... 25
5.2 Caratteristiche reologiche e modello di Bingham ... 26
5.3 Dispositivi di controllo del fluido... 27
5.3.1 Valve mode ... 28
5.3.2 Direct-shear mode ... 29
6 Studio di un apparato sperimentale per la caratterizzazione statica di un freno magnetoreologico... 30
6.1 Introduzione... 30
7 Specifica dell’apparato sperimentale ... 32
7.1 Problema... 32 7.2 Prestazioni ... 32 7.3 Rigidezza ... 33 7.4 Intervallo di Temperatura... 33 7.5 Interfacce ... 33 8 Soluzione... 34
8.1 Descrizione dell’apparato sperimentale ... 34
8.2 Modalità della prova eseguita a “priorità di carico” ... 36
8.3 Modalità della prova eseguita a “priorità di coppia frenante”... 41
9 Descrizione dello strumento software ed hardware utilizzato per l’acquisizione dei dati sperimentali ... 43
9.1 Generalità ... 43
9.2 Concetti fondamentali ... 43
9.3 Data flow ... 44
9.4 Descrizione dell’Hardware... 45
9.5 Specifiche del codice di acquisizione ... 45
9.5.1 Specifiche riguardanti il trattamento dei dati... 46
9.5.2 Specifiche riguardanti i segnali di uscita... 46
9.6 Descrizione del codice di acquisizione dati ... 47
9.6.3 VI Prova Statica a priorità di carico ... 47
9.6.4 VI Prova Statica a Priorità di coppia frenante ... 47
10 Risultati ... 48
10.1 Procedura... 48
10.2 Rappresentazione in forma grafica dei risultati acquisiti nelle prove a priorità di carico ... 48
10.3 Analisi dei risultati per le prove a priorità di carico ... 49
10.4 Analisi dei risultati per le prove a priorità di coppia frenante... 51
10.5 Caratteristica del freno MR ... 54
11 Studio di un apparato sperimentale per la caratterizzazione dinamica di un freno magnetoreologico... 55
11.1 Introduzione... 55
12 Specifica dell’apparato sperimentale dinamico ... 56
12.1 Problema... 56 12.2 Prestazioni ... 56 12.3 Rigidezza ... 57 12.4 Intervallo di Temperatura... 57 12.5 Interfacce ... 57 13 Soluzione... 58
13.1 Descrizione dell’apparato sperimentale dinamico... 58
13.2 Modalità della prova eseguita a “velocità imposta” ... 60
13.3 Modalità della prova eseguita a “volano libero” ... 63
14 Modifiche alla pedana riabilitativa TreT3 ... 64
14.1 Introduzione... 64
14.2 Interventi ... 64
14.3 Confronto delle prestazioni tra la pedana TreT3 e TreT3S2... 67
14.4 Studio del sistema di protezioni... 70
14.4.1 Imbardata ... 70
14.4.2 Beccheggio e rollio... 71
14.5 Sviluppi futuri... 75
15 Allegati: ... 76
Allegato 1) Catteristiche geometriche del Freno MRB-2107-3 ... 76
Allegato 2) Tabella riassuntiva delle principali caratteristiche meccaniche, geometriche ed elettriche del Rotary Brake MRB-2107-3... 77
Allegato 3) Tabella comparativa delle diverse tipologie di fluidi MR.. ... 78
Allegato 4) Wonder Box ... 79
Allegato 5) Taratura cella tonda ... 81
Allegato 6) Esempio di un file di acquisizione di una prova condotta con 500gr (a priorità di carico) ... 82
Allegato 7) Esempio di un file di acquisizione di una prova condotta con 5Volt (acquisizione a priorità di coppia frenante)... 84
Allegato 8) Codici macro per le prove sperimentali a priorità di carico... 87
Allegato 10) Specifica tecnica TreT3S2 ... 103
UNIVERSITÀ DEGLI STUDI DI PISA
Facoltà di Ingegneria
Corso di laurea in Ingegneria Meccanica
Tesi di laurea
Progetto costruttivo di una pedana riabilitativa
a controllo magnetoreologico.
Candidato
Salvatore Liberatori
Relatori:
Prof. Marco Beghini
Prof. Leonardo Bertini
Dott. Renzo Venturi
Prof. Francesca Di Puccio
Data di laurea
23/7/2004
Archivio tesi corso di laurea in ingegneria meccanica 68/04
Anno accademico 2003/2004
Titolo della tesi
Progetto costruttivo di una pedana riabilitativa a controllo magnetoreologico.
di
Salvatore Liberatori
Tesi proposta per il conseguimento del titolo accademico di
DOTTORE IN INGEGNERIA MECCANICA
presso laFacoltà di Ingegneria della
Università degli Studi di Pisa
Data della laurea 23/07/2004
Autore:
Salvatore Liberatori Approvata da:
Prof. Marco Beghini Prof. Leonardo Bertini Dott. Renzo Venturi Prof. Francesca Di Puccio
Introduzione 6 ___________________________________________________________________________
1
Introduzione
iNel presente elaborato si illustrano le varie fasi che hanno portato all’ottimizzazione di una pedana riabilitativa per il recupero motorio degli arti inferiori e si analizzano le caratteristiche meccaniche delle frizioni magnetoreologiche in essa adoperate. Tali frizioni sono caratterizzate dall’uso di fluidi particolari, detti appunto fluidi magnetoreologici (MR), che si distinguono per la peculiarità di variare le loro caratteristiche reologiche se sottoposti all’azione di un campo magnetico.
Progettata nell’ambito dell’esame di Costruzione di Macchine, la pedana si proponeva come strumento per la riabilitazione degli arti inferiori caratterizzato da elementi inediti quali:
1. tre gradi di libertà;
2. completa passività della macchina; 3. bassa inerzia.
Possiamo brevemente anticipare le motivazioni che hanno portato alla necessità di una ottimizzazione della pedana e che si basano essenzialmente su tre critiche mosse ad essa: 1. ingombro trasversale eccessivo; 2. mancanza di adeguate protezioni; 3. mancata specializzazione delle riduzioni per i tre gradi di libertà.
I dettagli sulla pedana, le motivazioni che hanno spinto all’uso delle frizioni magnetoreologiche e le caratteristiche dei fluidi magnetoreologici saranno esposte nei prossimi capitoli mentre nel successivo capitolo si ritiene opportuno introdurci a qualche concetto di fisiologia articolare.
Figura 1 Vista prospettica della pedana riabilitativa TreT3.
Elementi di Fisiologia articolare 7 ___________________________________________________________________________
2
Elementi di Fisiologia articolare
ii2.1
Introduzione
In questo capitolo ci occuperemo soprattutto della fisiologia articolare relativa al piede ed alla caviglia in particolare; illustrando i movimenti permessi da essa ed introducendoci a definizioni, nomi e concetti, usati in questo ambito.
2.2
Il complesso articolare del piede: la caviglia
L’articolazione della caviglia si deve immaginare come un insieme di articolazioni; la principale è detta tibio-tarsica ed a volte, erroneamente, essa viene identificata con la caviglia stessa. Il complesso delle articolazioni della caviglia prevede infatti, oltre alla già citata articolazione tibo-tarsica, anche un insieme di articolazioni situate nel retropiede.
Questo complesso di articolazioni, coadiuvato dalla rotazione assiale del ginocchio, realizza l’equivalente di una sola articolazione con tre gradi di libertà che permette di orientare la volta plantare in tutta le direzioni: questa caratteristica ci permette ad esempio di adattarci naturalmente alle asperità del terreno durante la camminata o nella semplice stazione eretta.
Alla luce di quanto sino ad ora esposto, se volessimo ridurre ad un modello meccanico il complesso articolare della caviglia si potrebbe senza ombra di dubbio rifarsi alla cerniera sferica: si possono, infatti, individuare tre assi rispetto ai quali si può eseguire un movimento di rotazione elementare.
Elementi di Fisiologia articolare 8 ___________________________________________________________________________
Di seguito sono descritti tali movimenti identificandone gli assi di rotazione.
I tre assi principali di questo complesso
articolare si incontrano
approssimativamente a livello del retropiede. Quando il piede è in atteggiamento normale, i tre assi risultano perpendicolari fra loro; in figura è illustrato il piede esteso e come si può notare l’estensione della caviglia modifica l’orientamento dell’asse Z.
1. X-X’: asse trasversale corrispondente all’asse della tibio-tarsica appartiene al piano frontale e condiziona i movimenti di flesso-estensione del piede che si effettuano nel piano sagittale.
Il modello meccanico della tibio-tarsica è quello di una cerniera cilindrica in cui i due elementi principali sono :
a. l’astragalo come elemento inferiore;
b. il perone come elemento superiore della cerniera e parte inferiore della tibia. 2. Y: asse longitudinale della gamba che condiziona i movimenti di adduzione–
abduzione del piede che si effettuano nel piano orizzontale. Tali movimenti sono
possibili grazie alla rotazione assiale del ginocchio flesso.
In piccola misura i movimenti d’adduzione-abduzione sono dovuti alle articolazioni della parte posteriore del tarso; ma in questo caso sono sempre associati a movimenti attorno al terzo asse;
3. Z: asse longitudinale del piede è orizzontale e contenuto in un piano sagittale. Condiziona l’orientamento della pianta del piede permettendo di orientarla all’interno o all’esterno attraverso i movimenti di pronazione e supinazione.
Figura 2 Visualizzazione schematica dei tre assi di rotazione della caviglia.
Elementi di Fisiologia articolare 9 ___________________________________________________________________________
2.2.1 Movimento di flesso-estensione
L’atteggiamento normale di un piede si realizza quando il piano plantare è perpendicolare all’asse della gamba; nella figura seguente tale posizione è identificata dalla lettera “A”. Partendo da questa posizione, la flessione della caviglia, viene definito come il movimento del
piede che ravvicina il dorso del piede alla faccia anteriore della gamba; si chiama anche flessione dorsale o dorso–flessione. In figura tale movimento viene identificato con la lettera “B”.
Inversamente, l’estensione della tibio-tarsica allontana il dorso del piede dalla faccia anteriore della gamba, mentre il piede tende ad allinearsi sul prolungamento della gamba; questo movimento è detto anche flessione plantare anche se l’uso di tale denominazione risulta improprio in quanto per flessione si intende sempre un movimento che conduce i segmenti di un arto verso il tronco.
Per una misurazione angolare, anziché riferirsi al centro della tibio-tarsica, come nella figura 3, è più comodo misurare l’angolo formato dalla pianta del piede con l’asse della gamba.
Se questo angolo è acuto (vedi figura 4 angolo b), si tratta di flessione; la sua ampiezza varia da 20° a 30° mentre con la zona tratteggiata si vuole indicare il margine delle variazioni individuali d’ampiezza, ossia 10°;
quando questo angolo è ottuso (angolo c), si ha l’estensione; la sua ampiezza varia da 30° a 50° mentre ora il margine delle variazioni individuali è più grande (20°) rispetto alla flessione.
Figura 3 movimento di flesso-estensione:
1. A-B Flessione-dorsale (o dorso-flessione); 2. A-C Estensione (o flessione-plantare).
Figura 4 angoli relativi al movimento di flesso-estensione misurati e dalla pianta del piede all’asse della gamba.
Elementi di Fisiologia articolare 10 ___________________________________________________________________________
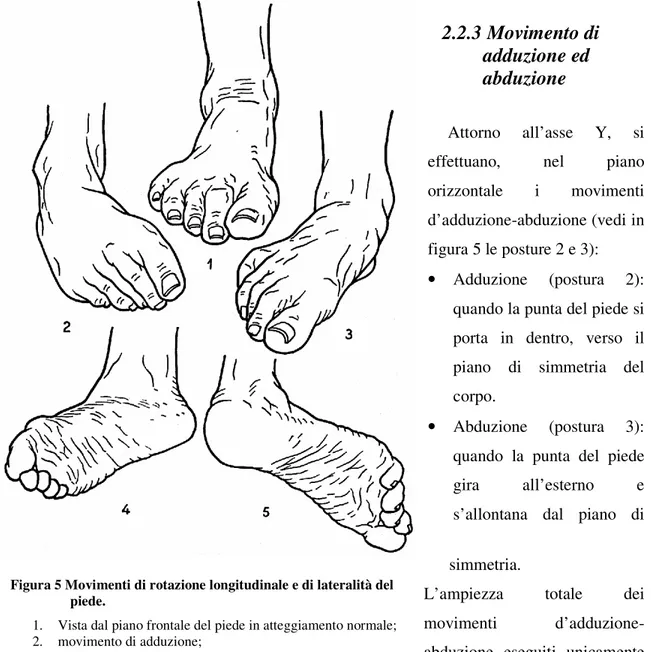
2.2.2 I movimenti di rotazione longitudinale e di lateralità del piede.
Oltre ai movimenti di flesso-estensione dove viene coinvolta l’articolazione tibio-tarsica, il piede, come è già stato anticipato, può anche effettuare movimenti attorno all’asse verticale della gamba (asse Y) ed attorno al proprio asse longitudinale (asse Z).
2.2.3 Movimento di
adduzione ed
abduzione
Attorno all’asse Y, si effettuano, nel piano orizzontale i movimenti d’adduzione-abduzione (vedi in figura 5 le posture 2 e 3): • Adduzione (postura 2):
quando la punta del piede si porta in dentro, verso il piano di simmetria del corpo.
• Abduzione (postura 3): quando la punta del piede gira all’esterno e s’allontana dal piano di
simmetria.
L’ampiezza totale dei movimenti d’adduzione-abduzione eseguiti unicamente nel piede varia dai 35° ai 45°. Tuttavia, questi movimenti della punta del piede nel piano orizzontale possono essere la conseguenza della rotazione esterna-interna della gamba (a ginocchio flesso) o della rotazione di tutto l’arto inferiore per mezzo
Figura 5 Movimenti di rotazione longitudinale e di lateralità del piede.
1. Vista dal piano frontale del piede in atteggiamento normale; 2. movimento di adduzione;
3. movimento di abduzione; 4. movimento di supinazione; 5. movimento di pronazione.
Elementi di Fisiologia articolare 11 ___________________________________________________________________________ dell’anca ( a ginocchio esteso). In questo ultimo caso risultano allora molto più ampi, potendo arrivare, come nel caso delle ballerine classiche ad un ampiezza totale di 90°.
2.2.4 Movimento di pronazione e supinazione
Attorno all’asse Z il piede ruota in modo da orientare la pianta (vedi in figura 5 la posizione 4 e 5):
• supinazione: quando oriento la pianta del piede verso l’interno (Fig. 5-4); • pronazione: quando oriento la pianta del piede verso l’esterno (Fig. 5-5). L’ampiezza della supinazione è di 52° risulta maggiore della pronazione 25-30°
2.3
Il movimento della caviglia come composizione di movimenti
elementari.
Da quanto sino ad ora esposto si può capire come sia complesso lo studio del movimento del piede in relazione alle sue articolazioni e non si è fatto alcun cenno alle articolazioni sottoastragaliche ed ai movimenti nella medio-tarsica che pure hanno un loro ruolo.
E’ bene ribadire che, tranne per la flesso – estensione, dove il movimento elementare è direttamente dipendente dall’articolazione tibio-tarsica, i movimenti di adduzione-abduzione e di prono-supinazione non esistono allo stato puro a livello delle sole articolazioni del piede; in altri termini non esistono articolazioni deputate specificatamente a questi movimenti. In definitiva le articolazioni del piede sono costituite in maniera tale che un movimento su uno dei piani, si accompagna obbligatoriamente ad un movimento negli altri due piani.
Così l’adduzione si accompagna necessariamente ad una supinazione (vedi in fig. 5 la postura 4) ed ad una modica estensione: è la posizione detta di inversione.
Analogamente l’abduzione si accompagna necessariamente alla pronazione ed alla flessione (vedi in fig. 5 la postura 5): è la posizione cosiddetta d’ eversione.
Così, salvo compensi a livello delle articolazioni del piede, l’adduzione non potrà mai essere associata alla pronazione e viceversa l’abduzione non potrà mai essere effettuata in coppia con la supinazione.
Vi sono quindi delle combinazioni di movimenti impedite dalla stessa architettura delle articolazioni del piede.
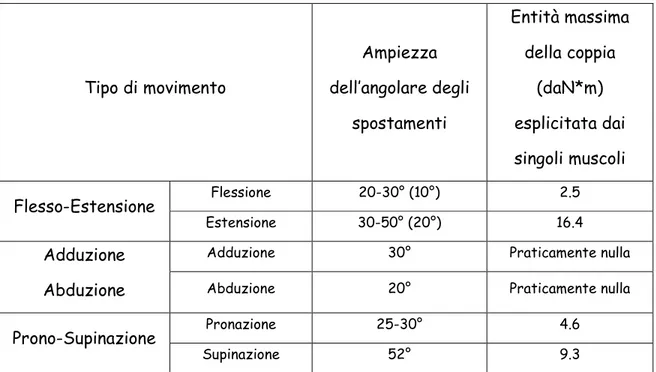
Elementi di Fisiologia articolare 12 ___________________________________________________________________________ ! " ! #$ $ ! ! "%#& ! ' ( ( ! ' ' $ ! &#% ' ) ) $ ! * #
Figura 6 Tabella riassuntiva degli spostamenti angolari e dell’entità e dell’entità degli sforzi associate al tipo di movimento.
2.4
Conclusione
Dopo questa sintetica introduzione alla fisiologia della caviglia e del piede, si vuole presentare la definizione di tre termini con cui, in meccanica, si indicano gli atti di moto di un corpo rigido cui gli è consentito di ruotare attorno a tre assi ortogonali tra loro.
Tale terminologia è frequentemente adottata in ambito automobilistico, nautico e aerospaziale ed è stata da noi adottata per indicare le rotazioni della pedana attorno ai 3 assi. Questi atti di moto vanno sotto il nome di :
1. Imbardata; 2. Beccheggio; 3. Rollio.
Essi in generale possono essere usati nella descrizione del moto di un qualsiasi corpo rigido.
1. Moto di imbardata : rappresenta la rotazione di un corpo (vettura, natante o aeromobile) attorno ad un asse verticale passante per il suo baricentro. Nel nostro caso rappresenta la rotazione del piede attorno all’asse Y: asse longitudinale della gamba.
Elementi di Fisiologia articolare 13 ___________________________________________________________________________
2. Moto di beccheggio : rappresenta un movimento di oscillazione intorno all’asse trasversale baricentrico del corpo. Nel nostro caso rappresenta una la rotazione del piede attorno all’asse X ovvero il movimento consentito dalla tibio-tarsica.
3. Moto di rollio: rappresenta un movimento di oscillazione trasversale del corpo intorno al suo asse longitudinale. Nel nostro caso rappresenta una rotazione del piede attorno all’asse Z: asse longitudinale del piede.
+ ,
La pedana TreT3 14 ___________________________________________________________________________
3
La pedana TreT3
3.1
La Necessità
Nella cura delle affezioni dell’apparato locomotore è implicito il concetto di movimento che diventa funzionale per una corretta riabilitazione.
Le discipline mediche che, ciascuna in diversa maniera e sotto diversi aspetti, richiedono una rieducazione alla deambulazione sono Ortopedia-Traumatologia-Fisiochinesiterapia.
Nella prima si correggono le deformità sia in senso morfologico che funzionale e la cura si completa con il recupero degli apparati della locomozione attraverso la rieducazione al movimento.
Nella seconda occorre restituire forma, forza e funzione con la chirurgia ortopedica riparatrice e con la ginnastica che avviene con l’esercizio al movimento degli arti da recuperare.
La terza promuove la “terapia con il movimento” prevedendo momenti diversi i quali a loro volta richiedono metodologie e tecniche diverse.
Possiamo così distinguere :
a) cinesiterapia preventiva: ha come obbiettivo di prevenire affezioni morbose e si serve, generalmente, di un’attività motoria a carattere soprattutto ludica;
b) cinesiterapia curativa o terapeutica: promuove il movimento con l’obbiettivo di attuare la cura, ad esempio, di posture scorrette che possono riscontrarsi ad esempio nell’età infanto-giovanile.
In altre parole per rieducazione al movimento si intende:
1. rieducazione motoria quando si vuole ripristinare il movimento del segmento leso;
2. rieducazione funzionale quando, una volta conseguita la rieducazione motoria, si vuol riproporre il segmento leso nella sua normale attività funzionale;
3. rieducazione propiocettiva quando si ricorre alla stimolazione di determinati recettori per accelerare il miglior recupero funzionale a livello del segmento leso sommando l’azione di più muscoli che lavorano in sinergia.
La pedana TreT3 15 ___________________________________________________________________________
3.2
Lo stato dell’arte
La riabilitazione all’uso di un arto offeso è pratica oggi effettuata da personale specializzato che, con attrezzi semplici e con manovre fisioterapiche, rieduca il paziente al controllo e all’esecuzione di determinati movimenti.
D’altro canto, come si può evincere da quanto esposto nel paragrafo precedente, nelle attività mediche inerenti alla riabilitazione esiste una particolare attenzione attorno a tutto quello che concerne il movimento in generale e la rieducazione locomotoria in particolare, facendosi di continuo più pressante, nell’attività fisioterapeutica, la necessità di utilizzare strumenti sempre più sofisticati che, oltre a consentire l’esercizio dell’arto offeso, consentano anche il controllo del movimento nonché l’entità degli sforzi in gioco, così da permettere al personale sanitario la messa a punto di una terapia personalizzata con evidenti vantaggi per l’utenza;
è per rispondere a queste necessità che si inquadra il progetto di una pedana orientabile, denominata TreT3, dotata di tre gradi di libertà che permetta l’esecuzione in stazione eretta e da seduto di esercizi terapeutici per l’arto inferiore sotto il controllo costante:
a) della configurazione raggiunta; b) dell’entità del carico trasferito; c) delle modalità di trasferimento.
La pedana TreT3 è parte integrante di una piattaforma fornita di opportuni sostegni che permettono all’utente di mantenere la posizione eretta mentre esegue gli esercizi riabilitativi.
Le attrezzature oggi come oggi a disposizione del terapista, quando non sono di realizzazione improvvisata o poco più che artigianale, non permettono una completa libertà di movimento agli arti inferiori e, se in alcuni casi questo viene parzialmente raggiunto, come nella pedana TCC1 di seguito brevemente descritta, non permettono un esercizio completamente passivo.
Di fatto oggi non esiste uno strumento universalmente valido per il trattamento di recupero della deambulazione che simuli il movimento degli arti inferiori e ne permetta un controllo.
La pedana TreT3 16 ___________________________________________________________________________
Figura 7 Schema di un semplice apparato per l’esercizio terapeutico realizzato con una pedana ed un cilindro.
3.2.1 La pedana TCC1
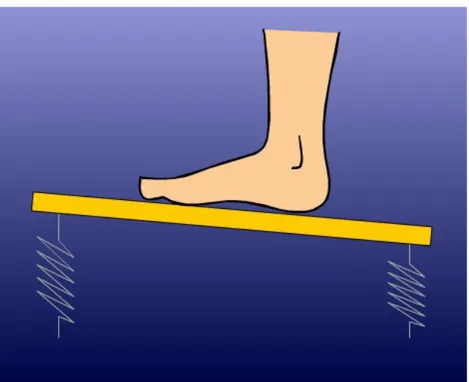
Il dispositivo TCC1 è basato sull’utilizzo di una pedana costituita da un piano superiore oscillante rispetto ad un fulcro centrale solidale al basamento fisso;
il piano mobile può assumere tutte le inclinazioni desiderate rispetto al piano orizzontale; fra il piano mobile, sul piano della pedana, e quello fisso, posto nel basamento, sono collocate quattro molle a torsione che hanno la funzione di creare una resistenza variabile alle rotazioni del piano mobile superiore.
Questo sistema consente di ottenere una variazione lineare della resistenza predeterminata ma non di mantenere la configurazione assunta senza l’azione dell’utente.
L’uso delle molle implica un comportamento, quand’anche regolabile, comunque lineare della piattaforma, inoltre può ingenerare problemi di sicurezza dell’apparato per il fatto che, eliminato il carico, la piattaforma ritorna immediatamente alla posizione d’equilibrio.
La pedana TreT3 17 ___________________________________________________________________________
Figura 8 Schema del dispositivo TCC1 caratterizzato dall’avere le molle che controllano il movimento della pedana.
Altri dispositivi controllati elettronicamente permettono i soli movimenti di rollio e beccheggio frenati tramite motori elettrici a passi, ciò comporta la necessità di un pesante controllo in tempo reale della coppia frenante erogata e non permette di considerare la macchina come dissipativa.
La pedana TreT3 18 ___________________________________________________________________________
3.3
La scelta della macchina dissipativa
Per macchina dissipativa si intende un dispositivo che non sia capace di movimento se non sotto l’azione dell’utente e che di questo dissipi l’energia investita nell’esercizio dello stesso movimento. Un tale dispositivo meccanico presenta i seguenti vantaggi:
a) è sicuro in quanto non può agire contro le intenzioni dell’utente, che nel nostro caso è in non perfette condizioni di salute;
b) in quanto reattiva risponde commisuratamente all’azione dell’utente nei limiti delle prestazioni richieste;
c) in assenza di azione esterna una macchina dissipativa rimane nella posizione raggiunta.
3.3.2 La scelta dei freni magnetoreologici
I fluidi magnetoreologici, ne esistono a base d’olio, gel o acqua, sono fluidi con particelle magnetiche in sospensione, in grado di variare la propria viscosità in presenza di un campo magnetico con tempi di reazione dell’ordine del millisecondo.
I freni magnetoreologici utilizzati in TreT3 sono capaci di opporre, senza riduzione, una coppia resistente di 6 Nm con basse tensioni d’alimentazione (parametro non trascurabile in una dispositivo ad uso medico) a fronte di un peso di 1.5 Kg e di un ingombro ridotto.
Vedi: “Documentazione Lord”
Anche prescindendo dalla decisione di realizzare una macchina intrinsecamente passiva, tali prestazioni non sono ottenibili con motori elettrici in analoghe condizioni.
La pedana TreT3 19 ___________________________________________________________________________
3.4
Necessità conseguenti alla natura passiva della macchina
3.4.3 Trasparenza all’azione dell’utente
La natura dissipativa, e quindi passiva, della TreT3 se da una parte gioca a favore della sicurezza della macchina che è, intrinsecamente, non attiva, ha di contro che l’utente deve farsi carico della movimentazione degli organi meccanici senza che la TreT3 possa in alcun modo agevolarlo (per esempio compensando attivamente la propria inerzia) se non nella riduzione degli attriti al livello minimo consentito dai controlli.
In altre parole l’utente, nell’esercizio riabilitativo, deve vincere almeno l’inerzia della macchina che pertanto deve risultare tale da apparire accettabile all’utente.
Ridurre l’inerzia della TreT3 significa a) ridurne il peso;
b) concentrare la massa in prossimità degli assi di rotazione così da limitare i momenti di inerzia.
È altrettanto importante che il movimento che l’utente compie sia “naturale” ovvero rispecchi la fisiologia del movimento del piede per questo si è cercato di avvicinare il centro di rotazione del moto di beccheggio vicino all’arco plantare così da ottenere un movimento di rototraslazione centrato a 40 mm al di sotto del piano di calpestio della pedana; un valore accettabile e difficilmente riconoscibile dall’utente che avvertirà una semplice rotazione in beccheggio e rollio della pedana.
3.4.4 La riduzione del peso
L’utente deve spostare meno massa possibile: la scelta dei materiali è stata guidata da questa necessità.
Per TreT3 è stato fatto ampio ricorso a profilati in leghe d’alluminio e materiali polimerici autolubrificanti riducendo l’uso di acciaio ad alta resistenza solo per la realizzazione dei perni.
Dove possibile si è preferito usare un cuscinetto a doppia corona di sfere della serie più leggera disponibile invece che due cuscinetti obliqui accoppiati.
La pedana TreT3 20 ___________________________________________________________________________
La stessa scelta dei freni magnetoreologici come dispositivi frenanti è derivata dal rapporto coppia frenante/peso non ottenibili con motori non ridotti oltre che dalla convinzione di voler realizzare una macchina passiva.
La pedana in compensato marino infine consente di accordare esigenze di peso, rigidezza, igiene, piacevolezza d’uso, estetica.
3.4.5 Le disposizione delle masse
Con l’obbiettivo di facilitare l’azione dell’utente, nella progettazione di TreT3 è stata posta grande attenzione alla disposizione dei gruppi di riduzione in quanto questi costituiscono le parti più pesanti della macchina.
Il gruppo di riduzione del rollio è solidale alla parte fissa così che nel movimento della pedana ne venga trascinato il solo settore dentato;
i gruppi di imbardata e beccheggio, sebbene in posizione asimmetrica rispetto al piano di beccheggio, sono montati il più vicino possibile agli assi di rotazione ed al centro di gravità del telaio di beccheggio.
Lo stesso Telaio di Beccheggio è progettato in modo da essere il più vicino possibile al piano di calpestio col risultato di ridurre il raggio giratore d’inerzia del telaio rispetto agli assi di beccheggio e rollio.
È stato così possibile portare il baricentro del Telaio di Beccheggio in prossimità del centro geometrico della pedana e di farlo coincidere con il centro di rotazione della TreT3.
3.4.6 La cinematica e i centri di rotazione in relazione alla fisiologia
Come anticipato nel paragrafo precedente, la pedana può essere vista come una cerniera sferica, con i centri di rotazione dei tre assi coincidenti in un punto dell’asse centrale della pedana posto a 40 mm al di sotto del piano di calpestio.
Il piede dell’utente realizza perciò un moto di rototraslazione non dissimile al movimento fisiologico del passo, nel quale tutto l’arco plantare si deforma abbassando il centro di rotazione al di sotto del piano di calpestio.
Il movimento di beccheggio riveste maggiore importanza nella camminata, da qui la disposizione del Telaio di Beccheggio trasversale al piede che minimizza il momento d’inerzia relativo a quell’asse.
La pedana TreT3 21 ___________________________________________________________________________
B L
H
3.4.7 L’interfaccia fisica
L’utente usa la TreT3 in posizione eretta, sorreggendosi ad appositi sostegni, con l’assistenza di personale qualificato che provvede ad inizializzare la macchina e ad impostare i programmi di riabilitazione. Il paziente interagisce con la TreT3 tramite la pedana, che trasmette al meccanismo sottostante le azioni da dissipare attraverso le quali si attua la riabilitazione fisioterapica.
3.4.8 Sicurezza “intrinseca”
TreT3 si muove solo sotto l’azione dell’utente dissipando l’energia del movimento, è pertanto impossibile che reagisca contro l’utente. Inoltre la presenza di personale qualificato dovrebbe garantire un uso corretto del dispositivo ciononostante può accadere che si acceda o si faccia uso alla macchina in maniera difforme da quella prevista. In tal caso la macchina deve mantenere la posizione per impedire che l’utente perda l’equilibrio rischiando di farsi male.
3.5
Caratteristiche principali della TreT3
Massa totale TreT3: 21 kg;Posizione del centro di rotazione 49 mm al di sotto della superficie di appoggio; Ingombri della pedana:
diametro: 545 mm
B= 772 mm H= 296 mm L= 545 mm
La pedana TreT3 22 ___________________________________________________________________________
Momenti di Inerzia ridotti agli assi di rotazione della pedana: Imbardata 0.123 kgm^2;
Beccheggio 0.128 kgm^2; Rollio 0.410 kgm^2.
Le frizioni magnetoreologiche 23 ___________________________________________________________________________
4
Le frizioni magnetoreologiche
4.1
Introduzione
Le frizioni magnetoreologiche (MR), oggetto del presente studio di caratterizzazione, sono degli organi meccanici la cui peculiarità risiede nell’adozione di particolari fluidi (fluidi MR appunto) per l’esercizio, il controllo e l’applicazione della coppia frenante.
Tali organi meccanici sono progettati, prodotti e commercializzati, in varie tipologie, dalla Lord
Corporation.
In questo elaborato ci occuperemo di una tipologia in particolare: quella commercialmente nota con il nome di Rotary Brake MRB-2107-3 e che si distingue per l’utilizzo di fluidi MR a base d’acqua la cui denominazione commerciale è
MRF-240BS.
Si possono distinguere tre tipi di freno a seconda del tipo di fluido adottato: 1. a base d’acqua;
2. a base di olio; 3. a base di silicone
La tipologia di freno esaminata risulta essere quella prevista nella realizzazione della pedana TreT3.
Già da queste prime righe si può riscontrare una discordanza di denominazioni; infatti se dapprima si è indicato questo particolare organo meccanico come una frizione, poi, indicandone il nome commerciale, si scopre che è un freno (rotary brake). Possiamo anticipare che si tratta solo di una apparente discordanza che verrà affrontata in seguito dopo aver illustrato il principio di funzionamento del rotary brake; una volta chiaro questo risulterà facile comprendere le diverse applicazioni cui può essere sottoposto tale organo meccanico e come si trovi a suo agio nel funzionare sia da freno che da frizione.
Le frizioni magnetoreologiche 24 ___________________________________________________________________________
4.2
I fluidi MRF-240BS
I fluidi MRF-240BS sono delle sospensioni in acqua di micro-particelle magnetizzabili. Pertanto, a seguito dell’applicazione di un campo magnetico, il fluido sviluppa nel suo interno una resistenza viscosa che dipenderà dall’intensità del campo stesso.
Il campo magnetico è attivato e controllato per mezzo della corrente elettrica che è inviata al freno per mezzo di due cavi di alimentazione.
Nell’Allegato 1) è riportata una tabella di raffronto tra i vari tipi di fluido MR che caratterizzano le diverse tipologie di freni MR. Dal punto di vista meccanico il freno MR è composto essenzialmente da due parti meccaniche:
1. L’elemento mobile: il rotore ;
2. L’elemento fisso: lo statore che funge da telaio per il freno e da alloggiamento per il fluido MR.
4.3
Freni o Frizioni ?
Tipicamente una frizione è costituita da tre organi meccanici: un albero di ingresso, uno di uscita e un terzo elemento o gruppo di elementi che fungono appunto da elementi di frizione e che possono permettere, con varie strategie di regolare la coppia meccanica che li attraversa consentendo inoltre anche il completo isolamento tra gli alberi di ingresso ed uscita.
Di fatto una frizione si può definire come un modulatore di coppia che governa la coppia in ingresso da un valore massimo (frizione innestata), ad un valore nullo (frizione disinserita) o viceversa.
I freni d’altro canto sono degli organi meccanicamente più semplici in quanto sono composti tipicamente da due elementi uno rotante l’altro fermo; l’azione frenante viene esercitata dal secondo sul primo con varie strategie che dipendono dal tipo di freno: freni meccanici a ceppo a nastro, freni elettromagnetici, idraulici ecc.
La particolarità dei Rotary Brake è che se da una parte si possono considerare dei freni perché costituiti da soli due elementi ( lo statore ed il rotore): uno per l’ingresso del moto l’altro per l’uscita, è pure vero che tra di essi è interposto un particolare fluido che ha la peculiarità di consentire l’accoppiamento tra le due parti con vari gradi di intensità.
Fluidi MR 25 ___________________________________________________________________________
5
Fluidi MR
5.1
Generalità
iiiCome è stato più volte asserito i fluidi magnetoreologici sono dei fluidi caratterizzati dalla proprietà di cambiare le loro caratteristiche reologiche se sottoposti all’azione di un campo magnetico. Tale proprietà non è riservata ai soli fluidi MR; esiste infatti un’altra categoria di fluidi che può cambiare le proprie caratteristiche reologiche che è sensibile però ai campi elettrici e per questo denominati fluidi elettroreologici (ER).
I fluidi ER ed i fluidi MR sono in letteratura anglosassone di solito indicati come “Controllable-Fluids” (CF) per sottolineare la peculiarità di questi ad essere governati nelle loro caratteristiche reologiche.
L’interesse in questi CF deriva dalla capacità di rispondere in maniera semplice, silenziosa, e rapida ai comandi esterni. Si è pertanto visto da subito, in questi materiali, l’opportunità di cambiare radicalmente i dispositivi elettromeccanici; di solito, dispositivi meccanici asserviti dall’elettronica, assolvono la loro funzione servendosi, oltre che di un apparecchio di controllo anche di un attuatore (meccanico o elettrico) e di fluidi tradizionali, le cui proprietà nell’utilizzo si mantengono costanti o quasi.
Attraverso l’impiego dei fluidi magnetoreologici e di un’adeguata riprogettazione, questi dispositivi, possono essere notevolmente semplificati permettendo di eliminare la parte attuativa del dispositivo essendo lo stesso fluido “attivo”. Un classico esempio è quello di un ammortizzatore automobilistico tradizionale al quale è richiesto il compito di smorzare le oscillazioni indotte dalla parte elastica (tipicamente una molla) del sistema di sospensioni: questo si fa attraverso l’uso di un fluido (olio) che viene fatto trafilare attraverso delle luci di sezione variabile, le quali, nelle applicazioni più sofisticate, possono essere comandate con particolari attuatori gestiti elettronicamente. Ipotizzando l’uso di fluidi magnetoreologici in luogo di quelli tradizionali, si può ottenere lo smorzamento facendo trafilare i fluidi attraverso delle luci che ora saranno d’area fissa giacché, adesso, è il fluido che controlla gli smorzamenti attraverso il cambiamento della sua viscosità. Si può quindi affermare che questi fluidi controllabili hanno la potenzialità di cambiare radicalmente i dispositivi elettromeccanici.
Fluidi MR 26 ___________________________________________________________________________
5.2
Caratteristiche reologiche e modello di Bingham
ivVolendo analizzare più da vicino i fluidi magnetoreologici occorre fare subito un distinguo tra loro e le sospensioni colloidali. I primi, infatti, sono delle sospensioni non colloidali di particelle polarizzate aventi una misura dell’ordine di qualche micron mentre nelle sospensioni colloidali le particelle sono molto più piccole (circa 1000 volte).
La risposta magnetoreologica dei MR Fluids è il risultato della polarizzazione indotta nelle particelle sospese con l’applicazione di un campo magnetico esterno.
Le particelle immerse nel fluido, sollecitate dal campo magnetico esterno, assumono una struttura a dipolo. Esse interagendo fra loro tendono ad allinearsi parallelamente alle linee di forza del campo magnetico formando delle strutture colonnari simili a delle catene. Queste strutture restringono, di fatto, la sezione utile al movimento del fluido circostante per cui si viene a riscontrare a livello macroscopico un incremento della viscosità della sospensione.
Si può riscontrare che l’energia meccanica di cui si ha bisogno per rompere queste strutture colonnari aumenta con l’incremento del campo magnetico da ciò si può dedurre una dipendenza del carico di snervamento (Yield stress) dal campo magnetico ovvero la resistenza del materiale è dipendente dall’entità del campo magnetico applicato.
In assenza di un campo applicato i fluidi MR mostrano un comportamento simile al newtoniano.
Questo comportamento dei fluidi MR è spesso schematizzabile come una plasticità di Bigham avendo uno sforzo di taglio variabile governato dalla seguente formula:
( )
η γ ττ = y H + ⋅ per τ ≥ τy
Al di sopra di τy (sforzo di snervamento tangenziale ) la τ dipende da τy
( )
H . η è la viscosità in assenza di campo magnetico;γ è lo scorrimento di taglio (shear rate);
Al di sotto di τy ( deformazioni dell’ordine di 10−3) il materiale diviene viscoelastico γ
τ =G per τ < τy
Dove G è il modulo d’elasticità tangenziale.
Occorre puntualizzare che anche G come τy dipende dall’entità del campo magnetico tuttavia in prima approssimazione può essere considerata costante.
Fluidi MR 27 ___________________________________________________________________________
Benché il modello di Bigham, utilizzato per la progettazione e la caratterizzazione dei dispositivi MR, si sia dimostrato utile, il comportamento del fluido reale mostrava alcuni significativi scostamenti dal semplice modello ipotizzato.
Probabilmente il più significativo di questi scostamenti è rappresentato dal comportamento non-Newtoniano dei fluidi MR in assenza di campo magnetico.
5.3
Dispositivi di controllo del fluido
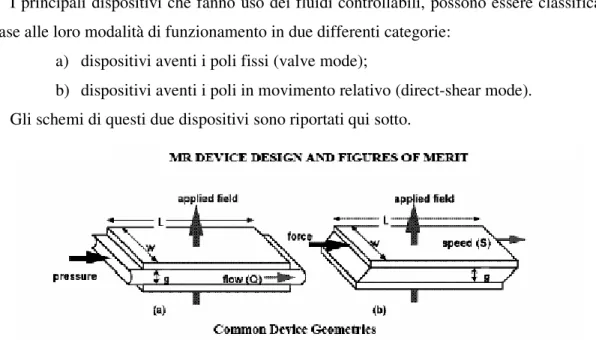
I principali dispositivi che fanno uso dei fluidi controllabili, possono essere classificati in base alle loro modalità di funzionamento in due differenti categorie:
a) dispositivi aventi i poli fissi (valve mode);
b) dispositivi aventi i poli in movimento relativo (direct-shear mode). Gli schemi di questi due dispositivi sono riportati qui sotto.
Figura 10 Rappresentazione schematica di due modi di funzionamento dei dispositivi che utilizzano fluidi magnetoreologici.
Esempi di valve mode comprendono servo-valvole, ammortizzatori e assorbitori d’urto tutti dispositivi PDF (pressure driver flow) cioè prevedono del fluido in movimento in virtù di una caduta di pressione.
Esempi di direct-shear mode sono frizioni, freni, dispositivi di centraggio e bloccaggio. Un terzo modo di operare sarebbe quello conosciuto con il nome di squeeze-film mode che può essere usato ogniqualvolta siamo in presenza di piccoli movimenti e alte forze applicate.
Dispositivi che si basano su quest’ultimo modo di operare stanno trovando una crescente applicazione nel controllo e limitazione delle vibrazioni dei rotori. Dispositivi a squeeze-film che usano liquidi tradizionali hanno il limite di funzionare bene solo alla velocità critica per cui sono stati pensati. Il vantaggio dei fluidi MR sta nel poter assumere una viscosità diversa per diverse velocità del rotore con tempi di reazione molto bassi.
Fluidi MR 28 ___________________________________________________________________________
5.3.1 Valve mode
La caduta di pressione che si manifesta nel dispositivo valve mode denominati anche “pressure driven flow mode” è comunemente assunta come la somma di due contributi uno
η P
∆ rappresenta la componente viscosa, l’altro ∆Pτ
( )
H rappresenta il contributo dipendente del campo magnetico H che, provocando un incremento dello sforzo di snervamento tangenziale, genera di fatto una caduta di pressione.Queste pressioni possono essere approssimativamente date dalle seguenti espressioni:
w g L Q P ⋅ ⋅ ⋅ ⋅ = ∆ η 12 η3
( )
( )
g L H c H P = ⋅ y ⋅ ∆ τ τRicordando che con “ ” si indica la viscosità in assenza di campo magnetico si vuole ribadire che con il pedice “ ” si indica la caduta di pressione relativa al fluido in assenza di campo magnetico H.
Analogamente, essendo τy
( )
H il carico di snervamento tangenziale dipendente dal campo magnetico, si indicherà con il pediceτ
il contributo alla caduta di pressione dovuto al campo H.Le quantità L, g e w sono, come si può osservare dalla figura 5, rispettivamente la lunghezza, lo spessore e la larghezza del meato di fluido presente tra i poli fissi. Con Q si indica invece il volume del meato.
Quindi la pressione totale può essere espressa dalla seguente relazione:
( )
( )
g L H c w g L Q H P P P + ⋅ y ⋅ ⋅ ⋅ ⋅ ⋅ = ∆ + ∆ = ∆ η τ 12η
3τ
Il parametro “c” ha un valore che è all’interno di un range che va da un minimo di 2 (per
η τ P P ∆ ∆
più basso di 1) o un valore massimo di 3 (per
η τ P P ∆ ∆
più alto di 100). Il totale della caduta
Fluidi MR 29 ___________________________________________________________________________
5.3.2 Direct-shear mode
Nella stessa maniera, la forza sviluppata da un dispositivo direct-shear mode può essere divisa in una componente di forza viscosa Fη ed in una Ft
( )
H che dipende dal campomagnetico che a sua volta influenza il valore del carico di taglio al limite si snervamento:
g w L S Fη =η⋅ ⋅ ⋅
( ) ( )
H H L w Fτ =τ ⋅ ⋅dove con “S” si vuole indicare la velocità relativa tra i poli mentre per gli altri simboli usati il significato è analogo a quello del caso precedente.
La forza totale sviluppata da un dispositivo direct-shear mode è la somma di F e di η
( )
H Ft .( )
( )
H A g w L S H F F F = η + τ =η⋅ ⋅ ⋅ +τ ⋅Studio di un apparato sperimentale per la caratterizzazione statica di un freno magnetoreologico. 30 ___________________________________________________________________________
6
Studio di un apparato sperimentale per la caratterizzazione
statica di un freno magnetoreologico.
6.1
Introduzione
I fluidi MRF-240BS sono delle sospensioni in acqua di micro-particelle magnetizzabili. Pertanto, a seguito dell’applicazione di un campo magnetico, il fluido sviluppa nel suo interno una resistenza viscosa che dipenderà dall’intensità del campo stesso. Il campo magnetico è attivato e controllato per mezzo della corrente elettrica che è inviata al freno per mezzo di due cavi di alimentazione.
Il freno MR è composto essenzialmente da due parti meccaniche: 1. L’elemento mobile: il rotore ;
2. L’elemento fisso: lo statore che funge da telaio per il freno e da alloggiamento per il fluido MR.
Il primo elemento, il rotore, è costituito da un albero, visibile dall’esterno, che costituisce la presa di moto del freno stesso. Collegato solidalmente all’albero vi è un disco collocato all’interno della carcassa (statore) del freno e per questo non visibile dall’esterno; In seguito il sottogruppo albero esterno - disco interno sarà indicato, per semplicità e chiarezza espositiva, sinteticamente come rotore.
Il rotore è assicurato, nella rotazione attorno al proprio asse, da due cuscinetti posti da entrambi i lati del disco interno.
Figura 11 Rappresentazione dello spaccato del Rotary Brake TM MRB-2107 dove sono visibili i componenti principali: 1. Coil Spira;
2. MR Fluid Fluidi Magnetoreologici; 3. Magnetic Field Campo Magnetico; 4. Rotor Rotore: Albero + Disco.
Studio di un apparato sperimentale per la caratterizzazione statica di un freno magnetoreologico. 31 ___________________________________________________________________________
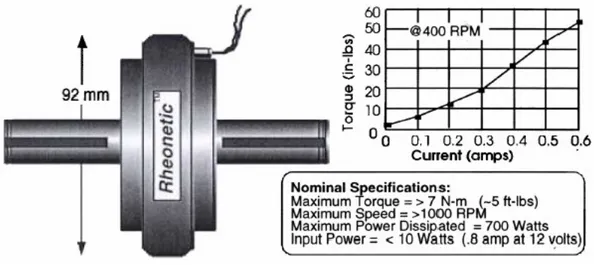
Figura 12. Rotary Brake TM MRB-2107 con le sue principali caratteristiche. In particolare sono riportati:
1. Grafico Coppia-Corrente di Alimentazione ( a 400 g/1' );
2. Coppia Max;
3. Velocità Rotazionale Max; 4. Max Potenza Dissipata.
Nell’Allegato 2) è riportata una tabella riassuntiva delle caratteristiche e prestazioni principali del freno MR in oggetto.
Di seguito è riportata la specifica di progetto riguardante l’apparato di prova dei freni MR. Con essa si vuole indicare le caratteristiche principali che deve possedere l’apparato di prova sperimentale per consentire una corretta analisi delle proprietà dei freni MR.
A queste informazioni si è giunti attraverso l’analisi delle proprietà costruttive ed operative del Rotary Brake TM MRB-2107 fornite dal costruttore e riportate in allegato; di seguito ogni qualvolta ci si riferisce ad esse verrà indicato il corrispondente riferimento al documento in allegato.
Specifica dell’apparato sperimentale
___________________________________________________________________________
32
7
Specifica dell’apparato sperimentale
7.1 Problema
Si vuole realizzare un apparato sperimentale (AS) atto a rilevare l’andamento della coppia frenante offerti dal freno MR, conosciuto commercialmente con la denominazione di Rotary Brake TM MRB-2107, al variare del valore della corrente di alimentazione della stesso.
Si vuole altresì indagare sulla presenza del fenomeno di isteresi nel fluido.
Le prove verranno condotte in condizioni statiche: si vuole cioè valutare la coppia frenante in condizione di rotore fermo.
In altre parole, l’apparato di prova deve poter prevedere il controllo e la misura della grandezza in ingresso: la corrente di alimentazione; mentre in uscita, deve prevedere la misura della coppia del frenante offerta dal Rotary Brake TM MRB-2107.
7.2 Prestazioni
In base a quanto stabilito nel punto precedente l’AS deve prevedere:
1. Sistema di rilevamento della rotazione dell’albero del freno così da rilevare l’incipiente movimento dello stesso quando la coppia esterna viene a superare quella resistente offerta dal freno;
2. Sistema di rilevamento e controllo della corrente di alimentazione del freno; occorre quindi che l’AS sia attrezzato in maniera tale da poter gestire il segnale di corrente in input ed in output: sarebbe auspicabile poter rilevare e controllare la corrente di alimentazione del freno tramite un personal computer (PC) ed un adeguato software di acquisizione;
Specifica dell’apparato sperimentale
___________________________________________________________________________
33
7.3 Rigidezza
Un carico esterno che provochi una coppia pari a quella massima esprimibile dal freno deve procurare una deformazione dell’apparato che sia inferiore a quello della risoluzione massima del dispositivo di lettura dello spostamento.
Si possono prendere a riferimento i seguenti dati dedotti in maniera cautelativa dalle caratteristiche del freno (vedi Allegato 2):
1. Coppia massima di progetto 10 Nm; 2. Freccia max 0.1mm;
7.4 Intervallo di Temperatura
In esercizio la temperatura dei componenti l’AS deve essere compresa nell’intervallo 10- 40°C;
7.5 Interfacce
L’interfaccia col freno Rotary Brake TM MRB-2107, sia essa di tipo meccanica o elettrica, non deve ostacolare la funzionalità del freno. Quindi:
1. Nella progettazione delle interfacce meccaniche dell’AS occorre attenersi a quanto indicato nell’allegato 1) dove sono riportati il disegno del freno con tutte le quote funzionali e dove, in particolare, sono visibili i punti di fissaggio al telaio della carcassa del freno così come previsti dal costruttore;
2. Per quanto riguarda le interfacce elettriche, il freno prevede un modulo di comando denominato Wonder Box (WB) prodotto dalla Lord Corporation e di cui in Allegato viene riportata la scheda di presentazione di tale dispositivo. Tale dispositivo, collegato ad una fonte d’alimentazione esterna (12 V, 2 amp), consente di variare l’intensità della corrente d’alimentazione del freno così da permettere la modulazione ed il controllo dell’azione frenante. Ciò avviene in maniera manuale attraverso una manopola che guida un potenziometro, o in maniera remota attraverso un computer tramite un opportuno spinotto montato sul WB;
Soluzione
___________________________________________________________________________
34
8
Soluzione
8.1 Descrizione dell’apparato sperimentale
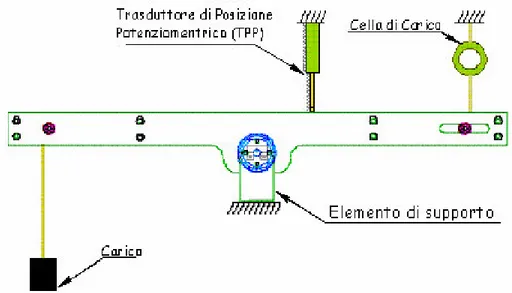
L’apparato sperimentale (AS) consiste in una struttura composta di due piastre vincolate ad entrambi i lati dello statore del freno MR ed in un elemento di supporto che vincola torsionalmente l’albero del freno.
L’apparato sperimentale così fatto, costituisce un meccanismo ad un grado di libertà; esso permette infatti la rotazione dello statore e delle due piastre ad esso collegate, rispetto al rotore, vincolato, a sua volta, all’elemento di supporto ( vedi fig. 4) il quale può considerarsi a tutti gli effetti il telaio dell’apparato sperimentale.
Questo AS offre la possibilità di valutare la curva di coppia frenante esprimibile dal freno MR al variare dell’entità della corrente di alimentazione dello stesso, nonché di indagare sul fenomeno dell’ isteresi: di seguito verranno chiarite meglio tali caratteristiche.
L’acquisizione della coppia frenante si esegue attraverso la lettura della tensione applicata all’estremità di un filo che è guidato da carrucole vincolate alle piastre dell’apparato di prova. In base alla distanza delle due carrucole (una è fissa l’altra può scorrere per alcuni “mm” all’interno di un’asola ricavata nella piastra) si ricava quindi la coppia desiderata.
L’imposizione della tensione all’estremità del filo si compie attraverso l’applicazione di alcuni pesi; per tale scopo si può pensare di utilizzare dei pesi calibrati.
Per facilitare l’acquisizione dei dati si prevede di sensorizzare il tratto del filo con una
cella di carico ( vedi fig. 4) che in questa maniera offre una lettura del peso effettivamente
Soluzione
___________________________________________________________________________
35
Figura 13. Schema dei principali elementi dell’apparato sperimentale.
Con lo scopo analizzare il fenomeno dell’isteresi si ha la necessità di eseguire le prove in due modalità differenti:
1. A priorità di carico;
2. A priorità di coppia frenante.
Con la prima modalità di prova si mantiene fisso il carico e per ciascun valore di esso si valuta la massima forza frenante facendo variare la corrente di comando del freno MR;
La seconda modalità di prova prevede, per ciascun valore della corrente e quindi per un fissato valore della coppia frenante, di valutare la massima forza frenante al variare del carico esterno.
L’AS è stato studiato per offrire la possibilità di eseguire le prove nelle due modalità sue esposte dotandolo di una cella di carico che, se si rivela superflua nella prima modalità di prova (nell’ipotesi che vengano usati pesi calibrati), si svela indispensabile nella seconda modalità di prova dove occorre misurare in continuo il carico applicato.
Si può peraltro sfruttare la prima modalità di prova (quella a priorità di carico) per calibrare la cella di carico utilizzando appunto dei pesi calibrati.
La corrente d’alimentazione del freno MR è controllata attraverso un dispositivo di controllo dedicato e denominato Wonder Box (WB) prodotto dalla Lord Corporation raffigurato con le sue principali caratteristiche nell’Allegato 4).
Tale dispositivo collegato ad una fonte d’alimentazione esterna (12 V, 2 amp) permette di variare l’intensità della corrente di alimentazione del freno o in maniera manuale attraverso una manopola che comanda un potenziometro, o in maniera remota attraverso un computer
Soluzione
___________________________________________________________________________
36
collegato con un opportuno spinotto previsto sul WB. Da PC si può controllare la tensione su tale spinotto; Quindi attraverso la misura della corrente all’uscita del WB, a sua volta inviata al PC, si può realizzare la registrazione della corrente. Eventualmente, in questa maniera, si può realizzare un “controllo ad anello chiuso” sulla stessa corrente.
Trasduttore di posizione potenziometrico 0-100 mm Alimentazione 10V;
uscita 0-10V
sensibilità 1V/10mm 0.1V/mm Cella di carico (fondo scala 30 Kg)
La sensibilità è stata tarata per 1 Kg la caratteristica di tale cella è indicata nell’allegato.
8.2 Modalità della prova eseguita a “priorità di carico”
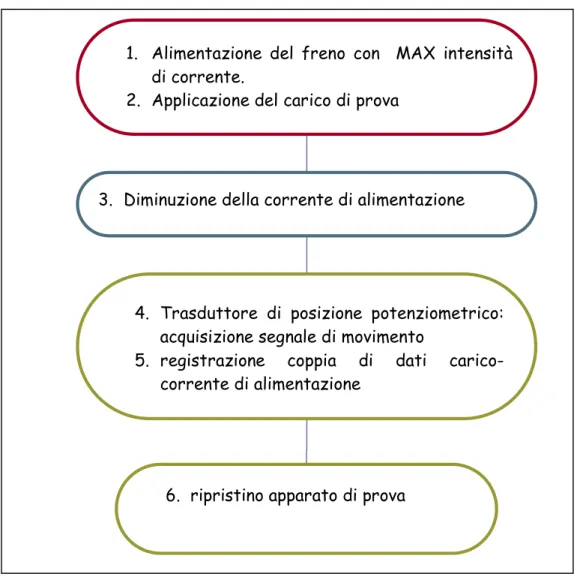
I principali passi in cui si sviluppa la prova sono:1. Con le piastre dell’apparato sperimentale bloccate nella posizione orizzontale si applica il carico vincolando un peso calibrato al filo. Quest’ultimo risulterà in tensione e la cella di carico provvederà alla lettura del carico e quindi della coppia applicata;
2. Si impone al freno la massima corrente di alimentazione così da ottenere la massima coppia frenante; quindi si sbloccano le piastre.
3. Tramite PC si agisce sulla tensione in ingresso della WB così da comandare la corrente di alimentazione del freno MR. Pertanto, attraverso l’azione interposta della WB, si diminuisce la coppia resistente: ad una riduzione della tensione di alimentazione della WB corrisponde cioè una diminuzione della corrente di alimentazione del freno cui corrisponde, a sua volta, una diminuzione della coppia frenante. Naturalmente nota la caratteristica di funzionamento della WB (vedi
Allegato 4) si può risalire alla corrente di alimentazione del freno; d’altro canto
quest’ultima risulta essere, per i nostri scopi, un parametro estremamente importante per la caratterizzazione del freno e quindi occorre adoperarsi per riuscire ad acquisire direttamente tale parametro. Per acquisire direttamente il segnale di corrente che comanda il freno si è realizzata una scheda (SC) che preleva la corrente all’uscita della WB e rimanda al PC un segnale in tensione.
Soluzione
___________________________________________________________________________
37
4. Con la riduzione progressiva della coppia frenante si arriva al punto in cui essa uguaglia la coppia esterna offerta dal peso, perciò da questo momento in poi si può osservare un movimento delle piastre. Attraverso il trasduttore di posizione potenziometrico si acquisisce il momento esatto in cui avviene il movimento delle piastre e registrare la corrispondente corrente di alimentazione.
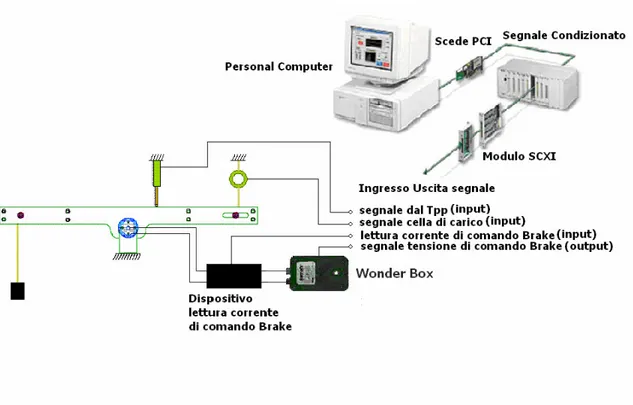
Ricapitolando il nostro AS gestisce i seguenti segnali:
1. dalla cella di carico ottengo la tensione del filo cioè il carico applicato ovvero la coppia applicata;
2. dal trasduttore di tensione potenziometrico acquisisco la posizione delle piastre dell’AS ovvero la rotazione del freno;
3. attraverso un opportuno segnale di tensione inviato alla WB agisco controllo il freno;
4. tramite l’uso della SC acquisisco la corrente di comando del freno.
In buona sostanza il 1° il 2° ed il 4° sono segnali che devono essere acquisiti; questi, per il sistema di acquisizione dati (descritto in seguito), rappresentano i dati di input. Il 3° è invece un segnale di output assolutamente necessario per il controllo del freno.
5. Si ripristina l’apparato sperimentale per una prova successiva con un nuovo valore del carico.
Soluzione
___________________________________________________________________________
38
Figura 14 Schema dell’apparato sperimentale completo riferito alle prove condotte a carico imposto.1
Soluzione
___________________________________________________________________________
39
Figura 15. Diagramma di flusso in cui si sintetizzano le principali azioni da eseguire per l’esecuzione di ciascuna prova sperimentale “a priorità di carico”. Tale diagramma di flusso è la base di partenza utilizzata per la progettazione dello strumento software utilizzato per l’acquisizione dei dati sperimentali.
"# / 0 1 # # # 2 &# 3 4 $# %#
Soluzione
___________________________________________________________________________
40
Ciascuna di queste prove verrà ripetuta un certo numero di volte con le stesse modalità sopra esposte così da eliminare gli errori accidentali.
Come sistema di acquisizione dati si è utilizzato un software il cui nome commerciale è LabVIEW.
I dati acquisiti nelle prove vengono registrati in file di testo e poi elaborati successivamente in un foglio elettronico. In particolare si è utilizzato il programma Excel che attraverso una procedura automatizzata consente di acquisire ed elaborare i dati sino alla loro rappresentazione in forma grafica. Tale procedura è stata sviluppata e messa a punto attraverso l’uso delle macro e di VBA acronimo di Visual Basic for Application che è il linguaggio in con cui vengono scritte le macro.
Come già anticipato l’elaborazione dei dati viene fatta successivamente così da ricavare la curva coppia frenante - corrente di alimentazione. Per far ciò, poiché ogni prova è fatta a priorità di carico e per ciascuna di esse si ricava una coppia di valori: peso applicato, corrente di alimentazione relativa all’incipiente movimento ne segue che occorrono diverse campagne di prove per arrivare all’andamento della curva coppia-corrente di alimentazione.
In conclusione si può affermare che da dati acquisiti in variabile temporale si passerà a quantità in funzione della corrente di alimentazione del freno.
Figura 16. Tale Diagramma di flusso sintetizza le quantità acquisite tutte in funzione del tempo ed inoltre mostra la parte di post-processamento da cui si ottiene la curva coppia-corrente di alimentazione. -' 56 2 ' ' 4 -/ 0
-Soluzione
___________________________________________________________________________
41
8.3 Modalità della prova eseguita a “priorità di coppia frenante”
I principali passi in cui si sviluppa la prova sono:1. Con le piastre dell’apparato sperimentale bloccate nella posizione orizzontale si inizia l’acquisizione dei dati fissando la coppia frenante del freno al valore desiderato. Tale valore della coppia frenante, come si è più volte ricordato, viene fissato attraverso il controllo della corrente di alimentazione del freno che avviene attraverso la WB che è a sua volta controllata dalla tensione proveniente dalla scheda di acquisizione del computer. A questo punto si apre il rubinetto consentendo il deflusso dell’acqua nel recipiente di raccolta;
2. La prova si conclude con il movimento delle piastre dell’AS segno dell’avvenuto superamento dell’entità ponderale rispetto alla coppia frenante.
3. Si ripristina l’AS per una nuova prova con un diverso valore della coppia.
Ricapitolando il nostro AS gestisce i seguenti segnali:
1. dalla cella di carico ottengo la tensione del filo cioè il carico applicato ovvero la coppia applicata;
2. dal trasduttore di tensione potenziometrico acquisisco la posizione delle piastre dell’AS ovvero la rotazione del freno;
3. attraverso un opportuno segnale di tensione inviato alla WB agisco controllo il freno;
4. tramite l’uso della SC acquisisco la corrente di comando del freno.
In buona sostanza il 1° il 2° ed il 4° sono segnali che devono essere acquisiti; questi, per il sistema di acquisizione dati (descritto in seguito), rappresentano i dati di input. Il 3° è invece un segnale di output assolutamente necessario per il controllo del freno. A differenza della prova a priorità di carico in quella a priorità di coppia frenante manteniamo costante il segnale di tensione che controlla la WB così da ottenere una coppia frenante costante.
Soluzione
___________________________________________________________________________
42
Figura 17 Schema dell’apparato sperimentale completo relativo alle prove condotte a priorità di coppia frenante.
Raccoglitore acqua
Descrizione dello strumento software ed hardware utilizzato per l’acquisizione dei dati sperimentali
___________________________________________________________________________
43
9
Descrizione dello strumento software ed hardware
utilizzato per l’acquisizione dei dati sperimentali
V9.1 Generalità
Per l’acquisizione dei dati si è creato un codice sviluppato in ambiente NI Labview , ver.6.0 (software largamente usato nei laboratori) e si è utilizzato un hardware (schede di acquisizione e box di precondizionamento) della National Instruments. LabVIEW è un acronimo di Laboratory Virtual Instrument Engineering Workbench.
La caratteristica principale che differenzia nettamente LabVIEW dai linguaggi di programmazione di tipo tradizionale, sta nell’ambiente di programmazione.
Mentre i programmi tradizionali sono intrinsecamente sequenziali, LabVIEW offre un ambiente di programmazione grafica ed inoltre mette a disposizione tutti gli strumenti necessari per lo sviluppo di applicazioni volte all’acquisizione dati e alla loro analisi e presentazione.
Con il linguaggio di programmazione grafica, detto linguaggio G, è possibile scrivere dei programmi semplicemente disegnando dei diagrammi a blocchi che riproducono il flusso di dati che vogliamo analizzare.
Quindi, dopo che è stato definito un diagramma a blocchi, LabVIEW lo compila generando il codice macchina.
9.2 Concetti fondamentali
I codici realizzati con LabVIEW sono chiamati strumenti virtuali (spesso vengono abbreviati in VI che sta, appunto, per Virtual Instruments) e si compongono in tre parti fondamentali:
1. Pannello Frontale;
2. Diagramma a Blocchi;
3. Icona/Connettore.
Lo strumento frontale rappresenta l’interfaccia dello strumento con l’utilizzatore e permette l’introduzione di valori in ingresso e di vedere i risultati generati dal diagramma a blocchi dello strumento virtuale. In analogia con il pannello frontale di uno strumento vero, gli ingressi sono chiamati controlli (control) e le uscite indicatori (indicator).