27
1
Introduzione
La Propulsione è l’atto di cambiare il moto di un corpo. Si fornisce una forza ad un corpo inizialmente in quiete, che cambia il suo stato di moto e quindi la sua velocità oppure che contrasta le forze resistive che si hanno nel moto attraverso un mezzo.
Generalità
1.1
Un endoreattore, o più comunemente un motore a razzo, è un motore a reazione, che sfrutta il principio di azione e reazione producendo una spinta.
Gli endoreattori sono classificati in molti modi come ci mostra la Tabella 1-1. A seconda del tipo di sorgente utilizzata, della loro funzione primaria, dimensione, tipo di propellente e al metodo di produzione della spinta.
Per il lanciatori, l’unica possibile scelta è quella della combustione chimica per portare carico utile dalla superficie terrestre all’orbita richiesta dalla missione. I propulsori chimici vengono divisi in due classi principali di motori, quelli a propellente solido e quelli a propellente liquido ma esiste anche una terza classe che è quella dei propulsori ibridi, che utilizzano propellente solido e liquido insieme. Vengono classificati anche in base alle caratteristiche fisiche del propellente stesso (se criogenico o stoccabile) o al sistema di alimentazione del propellente (sistema pressurizzato o con pompe).
Nel sistema di alimentazione con pompe, una turbopompa ha il compito di aumentare la pressione del propellente in ingresso alla camera di combustione, in modo da poter utilizzare serbatoi con funzioni di pressurizzazione atte solo a ridurre o a ritardare la cavitazione, diminuendo di molto il peso della struttura.
28
Tabella 1-1 Confronto tra attuali tecnologie di Propulsione
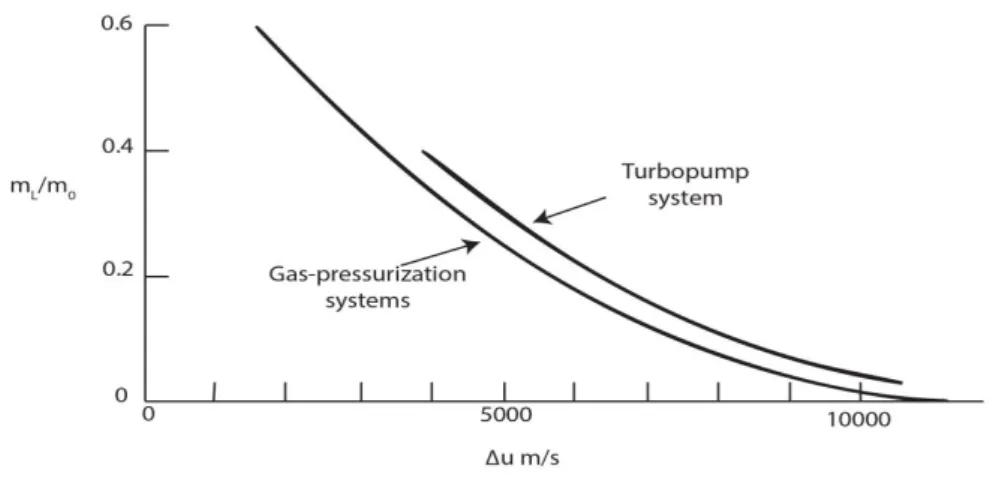
Si possono evidenziare meglio le differenze tra la soluzione con pompe e quella che utilizza serbatoi ad alta pressione in termini di rapporto di carico pagante (indicato conmL m0) e massa
iniziale del velivolo rispetto alla variazione di velocità, u , mediante la Figura 1-1 sottostante.
Figura 1-1 Confronto tra gli andamenti del carico pagante al variare di Δu per 2 sistemi differenti di pompaggio
La configurazione di una turbopompa è strettamente legata ai tipo di propellenti utilizzati. Se l’ossidante ed il combustibile hanno densità comparabile le rispettive pompe possono ruotare alle stesse velocità, e quindi possono essere montate sullo stesso albero messo in rotazione da un’unica turbina. Viceversa, se l’ossidante ed il combustibile hanno densità diverse, è necessario che le pompe ruotino a numero di giri differenti, e quindi verranno montati su alberi diversi. Con l’introduzione degli induttori a monte delle turbopompe, si ha un’ulteriore riduzione della pressione all’interno del serbatoio. Gli induttori sono stati studiati per lavorare in condizioni di
TECNOLOGIE Isp (s) Spinta (N) VANTAGGI SVANTAGGI
N2 60 O2 250 Liquida Monopropellente 140-235 Bipropellente 320-460 Solida 260-300 Ibrida 290-350 Nocciolo Solido 800-1100 Nocciolo Liquido 3000 Nocciolo Gassoso 6000 Elettrotermica 500-1000 Elettromagnetica 1000-7000 Elettrostatica 2000-10000 Gas Freddi 0.1-50 semplicità, sicurezza, basso impatto
basso impulso specifico Chimica 0.1-1.2*10^7 spinta elevata, tecnologia consolidata prestazioni modeste, complicazioni dovute a combustione, sicurezza Nucleare fino a 1.2*10^7 impulso specifico elevato
non ancora testata, politicamente non attrattiva, costosa, basso
rapporto spinta/peso Elettrica 10^(-4) a 10^(-20) impulso specifico molto elevato
massa del sistema elevata, bassi rapporti di
spinta, tecnologia poco consolidata
29
cavitazione controllata ed hanno la funzione di fornire un flusso pressurizzato alla turbopompa tale da evitare fenomeni cavitanti sulla stessa ed in modo che quest’ultima lavori alla massima efficienza.
La tecnologia delle moderne turbomacchine ha tra i suoi più importanti obiettivi quello di raggiungere una densità di potenza sempre più elevata. La potenza di pompaggio di una turbomacchina è proporzionale alla quinta potenza della sua dimensione caratteristica,D, per la terza potenza della sua velocità di rotazione,:
5 3
P
D
(1.1)Significa che per diminuire le dimensioni della macchina (e quindi anche il peso, fattore di primaria importanza nelle applicazioni aerospaziali) ma mantenere invariata la potenza è necessario aumentare la velocità di rotazione di uno stesso fattore, ma elevato alla 5/3. Quindi le turbomacchine vengono progettate come macchine supercritiche, nelle quali fenomeni di instabilità rotodinamica e cavitazione hanno effetti molto rilevanti.
Lo studio di questi fenomeni comincia negli anni ’60, ma le prime pubblicazioni di una certa importanza si hanno solo intorno agli anni ’80 con Brennen e Childs . La comprensione teorica di tali fenomeni resta tutt’ora lacunosa. Si utilizzano quindi prototipi scalati per analisi sperimentali, utili sia per la comprensione teorica dei fenomeni sia in tutto il ciclo produttivo.
La Cavitazione
1.2
La Cavitazione è la formazione di bolle di vapore in regioni a bassa pressione nel flusso di un liquido. Il termine fu introdotto nel 1895 da R.E. Froude per descrivere il fenomeno dannoso che si verifica sulle eliche dell’apparato propulsivo di tipo navale e che portava ad una diminuzione della velocità massima di navigazione rispetto a quella di progetto oltre che al danneggiamento dell’elica e delle strutture stesse.
La cavitazione è assimilabile ad un cambiamento di fase liquido-gas, che avviene mediante un abbassamento di pressione a temperatura costante, scendendo al di sotto della pressione di vapore del liquido alla temperatura considerata. Dobbiamo dire che questo fenomeno è diverso dall’ebollizione, dal momento che quest’ultima avviene con un innalzamento della temperatura a pressione costante (Figura 1-2).
30
Figura 1-2 Diagramma delle fasi di una generica sostanza nel piano p-T
La differenza tra i due fenomeni è molto più rilevante di quanto si possa immaginare a prima vista. Un cambiamento di temperatura in un liquido avviene per convezione quindi lo scambio di calore avviene in una regione localizzata del volume da riscaldare. Questo fa si che sia praticamente impossibile fornire un rapido e uniforme cambiamento di temperatura a tutto il volume. Viceversa, un rapido e uniforme cambiamento di pressione è una situazione frequente, in particolare per quanto riguarda i flussi veloci di fluidi. La cavitazione quindi è un fenomeno globale che interessa interamente il volume di fluido in questione.
I problemi principali causati dalla cavitazione sono di tre tipi, e vengono elencati qui di seguito:
In primo luogo la cavitazione provoca evidenti danneggiamenti alle superfici solide su cui collassano le bolle. Il collasso di una bolla è un fenomeno estremamente violento, in cui nascono getti supersonici di fluido che vanno a generare delle forti tensioni localizzate sui materiali. Il ripetersi di collassi di bolle in condizioni cavitanti nelle vicinanze del materiale fa si che la superficie abbia un cedimento per fatica, con distacco di piccoli frammenti di materiale.
Come secondo effetto, la cavitazione provoca un degrado delle prestazioni della macchina. Per quanto riguarda le pompe, in particolare si può identificare un valore di pressione in ingresso alla pompa al quale il rendimento di pompaggio subisce una violenta degradazione (cavitation breakdown) .
La cavitazione influenza inoltre la risposta dinamica della macchina, mediante l’insorgenza di instabilità che generano oscillazioni di portata e distribuzione della
31
pressione. Un esempio di queste instabilità è dato dalla cavitazione rotante, fenomeno che si presenta localizzato su un numero limitato di pale fino ad estendersi mano a mano a quelle adiacenti.
Questi problemi hanno tutti effetti negativi. In primo luogo quindi, per progettare una turbomacchina, è necessario disegnarla in modo che durante le sue condizioni operative questa non si trovi mai in condizioni cavitanti. Tuttavia questi accorgimenti non sono sempre utilizzabili nell’industria aerospaziale, dal momento che il modo migliore per far lavorare le macchine, evitando che queste cavitino, consiste nell’aumentare la pressione in ingresso alla macchina. Questo però, significherebbe pressurizzare il carburante nei propri serbatoi, con un aumento dei pesi strutturali dei serbatoi stessi, e conseguente penalizzazione in fatto di pesi.
Le pompe di uso spaziale in realtà sono progettate per lavorare a regimi parzialmente cavitanti, regimi che sono un compromesso tra degrado delle prestazioni e alleggerimento complessivo del velivolo. Gli accorgimenti che vengono presi per raggiungere questo obiettivo sono due:
Pressurizzare i serbatoi in modo che il fluido arrivi alla pompa con una pressione già più elevata. Questo fa sì che sia molto più difficile per il fluido raggiungere il valore della tensione di vapore critico per la cavitazione e quindi a ritardarne gli effetti. Tuttavia la pressurizzazione iniziale non può essere troppo elevata dal momento che serbatoi che consentano di raggiungere certe pressioni comportano un aumento dei costi e del peso della struttura.
Il secondo accorgimento consiste nel cercare di spostare la cavitazione in un elemento posto a monte rispetto alla pompa, elemento detto induttore. Un induttore è una pompa assiale che innalza la pressione del fluido immediatamente prima dell’ingresso nella pompa. Gli induttori possono fornire un salto di pressione al fluido che può raggiungere anche il 20 % del salto totale.
1.2.1 Tipologie di cavitazione
All’interno di una stessa turbopompa la cavitazione può avvenire in maniera molto diversa, come diverse sono le classificazioni che vengono fatte di tali fenomeni a seconda degli autori. La classificazione che utilizzeremo sarà quella fatta da Brennen (Figura 1-3).
32
Figura 1-3 Tipologie di cavitazione (Brennen,1994)
Supponendo di abbassare gradualmente la pressione di immissione del fluido di lavoro, la prima forma di cavitazione che si presenta è quella di estremità di pala (Tip vortex cavitation). Questo tipo di cavitazione si innesca al centro del vortice che si forma all’uscita delle pale, nella zona dove si trova il brusco passaggio dal bordo di attacco all’estremità della pala stessa. (Figura 1-4).
Figura 1-4 esempi di cavitazione di estremità di pala su eliche per uso marino (Brennen,1995)
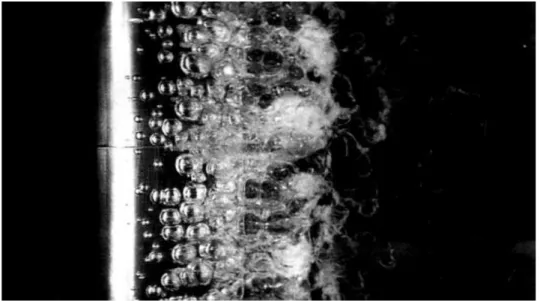
Abbassando ulteriormente la pressione in ingresso si arriva alla cavitazione a bolle (bubble cavitation). I nuclei di cavitazione già presenti nel fluido tendono ad ingrossare nel passaggio in zone a bassa pressione sul dorso della pala per poi collassare quando poi ritornano in zone ad alta pressione (Figura 1-5).
33
Figura 1-5 Cavitazione a “bolle” generata da un profilo idrodinamico (Brennen,1995)
Continuando ad abbassare la pressione di immissione le bolle si aggregano tra loro fino a formare estese bolle di vapore attaccate alla paletta, si ha la cavitazione di pala (blade cavitation). La cavitazione può essere parziale se la zona di vapore si richiude in un punto più a valle della stessa paletta, o se la bolla si estende oltre la lunghezza della paletta si dice che siamo in condizioni di “supercavitazione”(Figura 1-6).
Figura 1-6 a) Cavitazione parziale su un profilo b) Supercavitazione (Brennen,1995)
Alcune pompe sono studiate in modo da operare a regimi di supercavitazione, dal momento che superando la lunghezza della pala, al collasso la paletta sarà interessata in modo minore e quindi con minori conseguenze.
Infine quando la pompa si trova a lavorare con portate minori di quelle di progetto, troviamo un altro tipo di cavitazione detta di flusso secondario (backflow cavitation). In questo caso si genera un flusso di ritorno che può estendersi anche di molti diametri a monte dell’imbocco della pompa.
La classificazione riportata non ricopre sicuramente tutti i casi possibili, ma individua le principali forme di cavitazione che si possono riscontrare nelle pompe “unshrouded”.
Il verificarsi di uno o di un altro tipo di cavitazione non dipende esclusivamente dal valore di pressione a monte della pompa, ma dipende anche da altri fattori quali ad esempio la finitura
34
superficiale della pala. Alcuni tipi di rugosità infatti facilitano l’insorgenza di alcuni tipi di cavitazione mentre ne inibiscono degli altri. In particolare, nel caso di pale con una spiccata rugosità superficiale, l’elevato grado di turbolenza del flusso che si genera porta a favorire la cavitazione a “bolle”, mentre ostacola la cavitazione di pala in quanto lo strato limite si separa meno facilmente.
1.2.2 Instabilità Rotodinamica
L’instabilità rotodinamica più critica tra quelle che insorgono nelle turbopompe, è quella nominata col nome di Whirl ed è rappresentata dallo sviluppo di un moto laterale autosostentato della girante. Si tratta di un moto di precessione dell’asse dell’albero, il quale tende a spostarsi dalla sua posizione nominale seguendo una traiettoria più o meno regolare. In particolare, se le forze generate dal moto di whirl sono tali da far aumentare il raggio dell’orbita, la girante si trova a lavorare in condizioni di equilibrio instabile.
Le cause che generano il whirl possono essere classificate in due gruppi:
Forze di origine meccanica, che comprendono eventuali sbilanciamenti di massa, che possono essere statici (se l’asse di rotazione coincide con l’asse principale di inerzia che però non è baricentrico) nel qual caso le forze sono influenzate dalla forza centrifuga dovuta dalla traiettoria eccentrica seguita dal centro di massa, oppure dinamici (se l’asse di rotazione è baricentrico, ma non principale d’inerzia). Gli sbilanciamenti possono essere corretti mediante un’operazione detta equilibratura. Oppure l'anisotropia delle rigidezze e le interferenze tra elementi statorici e rotorici.
Forze di origine fluidodinamica, forze cioè dovute ad asimmetrie del fluido, perdite o ricircolo.
Il moto di precessione dell’asse, una volta innescato da qualsivoglia causa, è fortemente accoppiato con quello del fluido. Il campo fluidodinamico perturbato genera ulteriori forze fluidodinamiche sulla girante, che si autosostentano e diventano sempre più pericolose se in presenza di cavitazione. La cavitazione, infatti, ha un effetto destabilizzante e accentua gli effetti dell’whirl. Questo fenomeno inoltre riduce le forze laterali con diminuzione della massa aggiunta sul rotore che aumenta quindi le velocità critiche. Questo può portare una macchina, in origine progettata per essere supercritica in assenza di cavitazione, a non esserlo più con l’insorgere della cavitazione, portando a conseguenze disastrose nel caso la macchina si trovi a lavorare vicino alle velocità critiche.
Se si indica con
la velocità angolare del moto di precessione del rotore e con la velocità di rotazione della pompa, possiamo effettuare una classificazione del nostro moto di whirl:whirl subsincrono ( ), whirl sincrono ( ) e whirl supersincrono ( ). Si parla inoltre di whirl positivo o negativo a seconda che le rotazioni abbiano lo stesso verso oppure siano opposte. Il caso più semplice è quello sincrono. La forza eccitatrice è lo sbilanciamento delle masse e l’ampiezza delle oscillazioni può essere controllata tenendoci lontani dalle velocità critiche oppure mediante l’equilibratura. In molte applicazioni, però, sono stati osservati whirl subsincroni.
Il moto di precessione in realtà non è di per se molto pericoloso, infatti, molti alberi vengo progettati in modo da funzionare correttamente anche in presenza di eccentricità. Il problema
35
sorge quando l’eccentricità si discosta eccessivamente da quella nominale, ed in particolare, se si pensa a danneggiamenti per interferenza tra parti rotanti, nelle pompe ad ossigeno liquido ci sono concrete possibilità di esplosioni.
A causa della notevole complessità, le forze rotodinamiche non stazionarie, agenti su turbopompe cavitanti e non cavitanti, sono al momento comprese solo parzialmente e nessuno dei modelli teorici fin qui sviluppati è risultato del tutto soddisfacente. Si rende necessario, sia per un corretto dimensionamento delle turbopompe ad elevate prestazioni che per una validazione di eventuali modelli teorici o numerici, affidarsi ai risultati sperimentali. I risultati sperimentali più importanti in questo campo sono stati condotti presso il California Institute of Technology, ottenuti da B. Jery, R.J. Franz e A. Bhattacharyya.
36
Bibliografia
1.3
[1] L. Pecorari, Studio delle prestazioni cavitanti e delle forze rotodinamiche su induttori per uso
spaziale, Tesi di Laurea in Ingegneria Aerospaziale, Università di Pisa,2008-2009
[2] C.E. Brennen , Hydrodinamics of pumps, Oxford University Press, 1994.
[3] D. Valentini, Sviluppo di un modello per la progettazione di turbopompe centrifughe, Tesi di Laurea in Ingegneria Aerospaziale, Università di Pisa,2010-2011
[4] B. Jery, Experimental Study of Unsteady Hydrodynamic Force Matrices on Whirling Centrifugal
Pump Impellers, Ph.D. Thesis, California Institute of Technology, 1987
[5] A.Bhattacharyya, Internal Flows and Force Matrices in Axial Flow Inducers, Ph.D. Thesis, California Institute of Technology, 1994