Capitolo 3. Il software CFDTD e Simulazioni di Bobine
di Volume e Superficiali
3.1 Software CFDTD
Il Parallel Conformal Finite Difference Time Domain (CFDTD) è un simulatore elettromagnetico 3D full-wave per l’analisi di antenne, cavità risonanti, componenti a microonde ecc. che implementa il metodo delle differenze finite nel dominio del tempo (FDTD).
Figura. 3.1 Interfaccia grafica del Software (CFDTD).
Questo software è stato sviluppato presso l’Electromagnetic Communication Lab dal professor W. Yu e dal professor R. Mittra della Pennsylvania State University. La versione
utilizzata per questo lavoro di tesi presenta un’architettura parallela, ovvero può distribuire l’onere computazionale su diversi computer, in ambiente Windows o Linux, in modo da formare un cluster.
Il software è costituito da un programma principale (project manager), un visualizzatore di mesh (mesh viewer) e dal modulo di visualizzazione dei risultati. Il programma è inoltre dotato di un visualizzatore di oggetti 3D che consente di verificare la corretta costruzione del dispositivo e l’opportuna disposizione delle porte di ingresso e di misura; è inoltre provvisto di un generatore tridimensionale di mesh non uniformi.
Le principali opzioni del software sono:
• Source setting: la prima finestra di dialogo che appare è quella per l’impostazione dei parametri dell’eccitazione. Nel software è possibile utilizzare tre tipi di segnale: l’impulso gaussiano non modulato e con componente continua, l’impulso gaussiano modulato con una funzione sinusoidale e senza componente continua e l’eccitazione sinusoidale non modulata. Quest’ultimo segnale di stimolo include soltanto una singola frequenza ed esegue un filtraggio all’inizio e alla fine della simulazione per eliminare gli effetti del transitorio.
• Cell setting : il numero totale di passi temporali di simulazione determina, insieme con la
durata di ciascun passo, la larghezza della finestra temporale di simulazione. Le analisi a bassa frequenza (come quelle svolte in questo lavoro di tesi) sono caratterizzate da una variazione temporale più lenta, e richiedono quindi un numero di passi significativamente maggiore rispetto a quelle ad alta frequenza. Al fine di impedire l’insorgere di instabilità numeriche il software determina automaticamente le dimensioni del passo temporale, in base alla discretizzazione spaziale, utilizzando la condizione di Courant. Il tempo totale di simulazione è ricavabile dalla seguente espressione:
T = Ntotaltimestep⋅Δt (3.1)
• Discretizzazione spaziale: la discretizzazione spaziale gioca un ruolo molto importante
nelle simulazioni FDTD. Il software Parallel CFDTD è in grado di generare mesh uniformi e mesh non uniformi. Utilizzando un approccio non uniforme si possono eseguire due approcci:
a) Approccio globale che consiste nel disegno globale, in cui è sufficiente definire la direzione di discretizzazione e la dimensione minima della cella (espressa in metri, centimetri, millimetri, micrometri);
b) Approccio locale è un approccio in cui si discretizza separatamente ogni regione. Il software è infatti in grado di dividere il dominio computazionale in regioni, in base alla dimensione degli oggetti, in ciascuna direzione.
La distribuzione della mesh può avere tre formati:
a) da fitta a lasca e di nuovo a fitta; b) da lasca a fitta;
c) da fitta a lasca.
Altri due fattori utilizzati per la discretizzazione non uniforme sono il rapporto tra celle adiacenti, che deve essere sempre compreso tra 1 e 1.2, e la minima dimensione di cella in ogni sottodominio, che deve essere minore di 1/20 della lunghezza d’onda corrispondente alla massima frequenza di interesse.
• External object: in un progetto realizzato con parallel CFDTD è possibile inserire diversi tipi di oggetti direttamente dall’interfaccia grafica (rettangoli, triangoli, esagoni, cerchi, anelli, ecc). Il software è interfacciato con i più comuni generatori di mesh commerciali (Auto-Cad, Patran, Femap e GID) tramite il formato di mesh triangolari (fig 3.2). Gli oggetti possono essere di spessore finito, infinito o infinitesimo.
• condizioni al contorno: le condizioni al contorno rivestono notevole importanza nelle simulazioni FDTD. Le principali condizioni al contorno che è possibile utilizzare con Parallel CFDTD sono:
Perfectly Matched Layers (PML): viene utilizzato per assorbire i campi che escono dal dominio computazionale, in modo che la riflessione dovuta al troncamento sia minima. Per la maggior parte delle applicazioni si preferisce applicare queste condizioni anche se questo produce un incremento del tempo di simulazione.
In Parallel CFDTD le condizioni PML sono costituite da 6 strati (solitamente la riflessione degli strati di PML si mantiene al di sotto dei -30 dB e in alcuni casi si arriva anche a -60 dB) e funzionano correttamente per tutti gli angoli di incidenza e per tutte le frequenze.
MUR: sono più semplici rispetto alle condizioni PML e non richiedono strati multipli, ma
di contro sono meno efficienti. Il livello di riflessione è dell’ordine dei -22 dB. Inoltre richiedono più spazio tra l’oggetto simulato e il contorno del dominio computazionale a causa della dipendenza dall’angolo di incidenza.
Perfect Electric Conductor (PEC): sono condizioni al contorno naturali dove il campo
elettrico tangenziale viene forzato a zero.
Perfect Magnetic Conductor (PMC): sono molto simili alle (PEC) ma la componente
tangenziale del campo magnetico a essere forzata a zero.
• Conformal FDTD Technique: nel caso in cui gli oggetti da analizzare con il metodo delle FDTD siano conduttori elettrici perfetti, aventi superfici o spigoli curvi, l’errore di staircase delle tecniche FDTD convenzionali può produrre un errore non trascurabile sul risultato finale. Tipicamente negli algoritmi FDTD conformi convenzionali le celle adiacenti agli oggetti si deformano per seguirne la forma; ma questo tipo di approccio può rendere instabile l’algoritmo, e la stabilità del risultato viene ad essere dipendente dalla forma degli oggetti. Per risolvere il problema il software Parallel Conformal FDTD assume che i campi elettrico e magnetico all’interno delle celle distorte siano posizionati nelle stesse posizioni in cui si troverebbero per una FDTD convenzionale, in altri termini la legge di Faraday viene applicata sull’intera cella anziché sulla sola parte distorta. Questo implica che il contorno degli oggetti segue gli spigoli della mesh e che gli spigoli interni agli oggetti di un conduttore elettrico perfetto non sono considerati. Questo tipo di approccio che non deforma la mesh seguendo la forma dell’oggetto, permette di eliminare problemi di instabilità manifestati da particolari algoritmi basati sul metodo delle differenze finite nel dominio del tempo (FDTD).
Figura. 3.4: a) Cammino del Conformal FDTD in una cella distorta; b) Intersezione tra la mesh
FDTD e una superficie PEC.
• output: Per la visualizzazione dei risultati è necessario utilizzare gli appositi moduli di
visualizzazione delle mesh e dei risultati nel menu data-processing (figura 3.5).
Figura 3.5: a) Visualizzazione dei risultati.
Figura. 3.6: Distribuzione della costante dielettrica relativa per il modello numerico
(torace sinistra e per il modello numerico non omogeneo a destra)
Inoltre il software permette di visualizzare, per i vari oggetti, l’andamento delle dimensioni delle celle e del ratio lungo i tre assi cartesiani. E’ possibile visualizzare l’andamento della conducibilità e della permettività dielettrica per le varie geometrie oggetto delle simulazioni. Il software Parallel Conformal FDTD consente di calcolare i parametri caratteristici di un dispositivo a partire dai valori di tensione e corrente di ingresso. E’ possibile calcolare l’impedenza elettrica di una microstriscia, definendo opportunamente i parametri evidenziati in figura 3.7 (costante dielettrica relativa, altezza, spessore).
Figura 3.7: Calcolo dell’impedenza elettrica di una strip line.
3.2 Phased Array con Solver CFDTD
Nei capitoli precedenti sono state introdotte, le surface coils che forniscono un elevato valore del rapporto segnale-rumore grazie alla loro grande sensibilità verso piccole zone del volume esaminato permettendo di diminuire drasticamente la quantità di rumore ricevuto. Le surface coils presentano comunque un campo di vista (FOV) limitato a queste piccole regioni del campione. Una soluzione per ottenere un incremento della regione di sensibilità è quella di utilizzare un array di bobine, in cui ciascuna bobina è connessa ad un canale di ricezione e le uscite dai vari canali di ricezione sono poi connesse tra loro, con una correzione di fase dipendente dal punto dello spazio dal quale il segnale è originato. Le bobine phased array, (cfr. paragrafo 1.5.1) sono particolari antenne di ricezione, costituite da più unità disposte in parallelo. Ciascuna bobina riceve il segnale indipendentemente dalle altre e lo stesso nome sottolinea questo comportamento, ricordando proprio il funzionamento dei phased array nei radar e negli ultrasuoni.
Con questa tecnica si ottengono valori elevati di SNR pari a quelli garantiti dalle surface coils e con un elevato FOV pari a quello fornito da bobine di volume: un tale array di bobine è chiamato NMR phased array. Considerando una coppia di spire risonanti sintonizzate alla stessa frequenza fo, se i due loop vengono avvicinati tra loro, la mutua induttanza tra le spire provoca uno splitting delle frequenze di risonanza (fig. 3.8), che inevitabilmente porta alla perdita di sensibilità proprio alla frequenza fo.
Figura. 3.8: Splitting delle frequenze di risonanza.
Per eliminare o ridurre questo accoppiamento si possono sovrapporre le bobine ad una distanza relativa tale percui la mutua induttanza sia minima, idealmente si vorrebbe nulla. Uno degli obbiettivi del lavoro di tesi era quello di valutare il minimo disaccoppiamento geometrico tra due bobine RF circolari per applicazione RM. La simulazione è stata eseguita utilizzando il simulatore elettromagnetico denominato Parallel Conformal Finite Difference Time Domain (CFDTD) (cfr. paragrafo 3.1).
3.3 Simulazione di bobine RF circolari piane
Le bobine oggetto delle simulazioni hanno una forma circolare, con diametro pari a 4,33 cm ed uno spessore di 2mm. Il materiale con cui sono state realizzate è un conduttore elettrico perfetto (PEC).
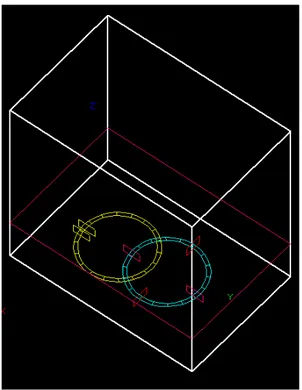
In figura 3.8 vengono mostrate le due bobine all’interno dell’area di lavoro 3D del solver FDTD; il parallelepipedo bianco definisce l’area di lavoro. Da notare che le bobine sono poste su piani paralleli, distanti 0,5 cm nella direzione z.
Figura 3.8: Disegno delle bobine realizzate all’interno dell’area di lavoro(in bianco) con il
Parallel CFDTD.
Nella successiva figura illustriamo le caratteristiche delle due bobine:
▪ in giallo la bobina denominata coil1
▪ in azzurro la bobina denominata coil2
▪ in giallo la sorgente di eccitazione della coil1e la porta di prelievo del segnale ▪ in rosa le porte di prelievo del segnale lungo la direzione y (output y)
▪ in rosso e porte di prelievo del segnale lungo la direzione x (output x)
Le porte di prelievo di tensione che corrente (output x- output y) consentono di determinare il parametro di disaccoppiamento geometrico S21.
Al fine di valutare il disaccoppiamento si è infatti deciso di alimentare la coil1 (coil gialla in figura 3.8) per mezzo di un loop di campo magnetico (figura 4), che ha un comportamento simile a quello di un generatore di corrente, e di valutare il parametro S21, indice del disaccoppiamento, sulla coil2, non alimentata.
Figura 4: Loop di campo magnetico per alimentare la bobina coil1.
Per la determinazione del parametro S21 come detto precedentemente vengono utilizzate via software le porte (output x, output y) che forniscono il valore di corrente e di tensione, in funzione del tempo, nel punto della coil in cui sono poste. In fase di post processing queste porte di uscita permettono di calcolare il valore di S2112 in quel punto.
12 S
ij con i≠ jè l’elemento generico nella matrice di scattering, che caratterizza da un punto di vista quantitativo
l’accoppiamento tra gli elementi dell’array, e qualitativamente è un indice degli artefatti nell’imaging MR dovuto proprio all’accoppiamento tra elementi vicini.
In questo studio le bobine possono essere considerate come una rete avente due porte, una di ingresso (coil1) e una di uscita (coil2): il valore S21 misurato terrà conto della risposta misurata sulla coil2 prodotto dal segnale sulla coil1. Maggiore è il valore di S21 maggiore saranno gli artefatti nell’immagine acquisita. Lo stimolo in ingresso è un segnale sinusoidale alla frequenza di 128 MHz.
Al fine di rendere la misura più significativa garantendo una convergenza del risultato si è deciso di inserire 4 porte di prelievo del segnale sulla bobina coil2, in modo da considerare conclusa efficacemente la simulazione quando queste porte di misura fornissero un valore di S21 numericamente uguale (o comunque molto simile).
La misura del disaccoppiamento è un parametro proprio della bobina (o meglio dell’array di due bobine) e non dipende dal punto di inserzione della porta di misura.
Per tale studio sono state impostate le seguenti condizioni al contorno evidenti in figura 4.1 condizioni al contorno PML (cfr. par. 3.1) per ogni faccia del parallelepipedo che definisce l’area di lavoro. Il piano Zmin è stato assunto come riferimento per le tensioni.
3.3.1 Definizione della mesh non uniforme
Una volta inseriti nell’ambiente 3D di lavoro gli oggetti da simulare, le porte di ingresso e quelle di misura è necessario definire la mesh spaziale; questa operazione, come già accennato nel paragrafo 3.1, assume un ruolo molto importante per la buona riuscita della simulazione. Una buona mesh deve rispettare le seguenti caratteristiche affinchè si abbia una giusta convergenza del risultato:
• la dimensione di ciascuna cella deve essere più piccola di 1/20 della lunghezza d’onda corrispondente alla massima frequenza di interesse;
• la struttura analizzata deve essere suddivisa in un numero intero di celle in tutte le direzioni per mantenere il più piccolo possibile l’errore dovuto alla discretizzazione;
• le linee di alimentazione o le aperture devono essere suddivise in almeno tre celle sul lato più piccolo (in alcuni casi è consigliabile 6) per garantire una corretta ricostruzione dei campi elettromagnetici su quei lati dove questi variano più velocemente;
• il rapporto tra celle adiacenti deve essere compreso tra 1 e 1,2.
Per ridurre il costo computazionale è stata scelta una mesh non uniforme, anche se più difficile da realizzare.
Una volta definita la dimensione minima della cella, si va a definire il rapporto tra celle adiacenti, seguendo un approccio locale,utilizzando tale approccio l’utente è in grado di separare ogni regione. Quindi dopo aver definito la dimensione minima della cella e il rapporto tra celle adiacenti (entrambe variabili globali), si definisce la distribuzione delle mesh, in ogni sottodominio, secondo uno dei seguenti formati:
b) FC (Fine to Coarse ): da fitta a lasca; c) CF (Coarse to Fine): da lasca a fitta.
Naturalmente la distribuzione della MESH deve essere tale da garantire che il rapporto tra le celle confinanti sia comunque compreso tra 1 e 1.2.
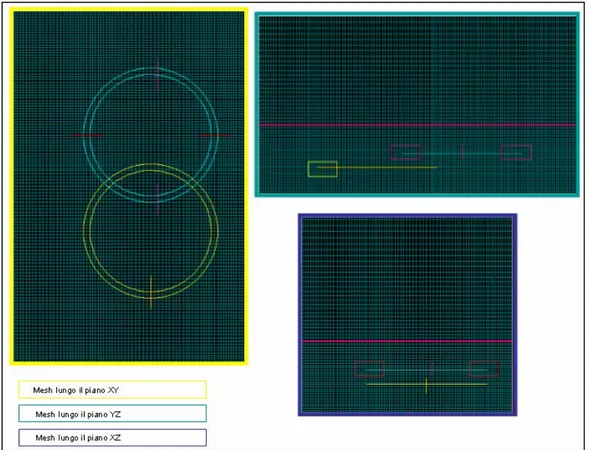
In figura 4.2 è riportata la mesh realizzata sulle bobine, evidenziata sulle proiezioni dei
piani xy, xz e yz. Unendo le informazioni ricavabili dalla figura 4.2 e dalla figura 4.3 si ha la
conferma, in modo grafico, di come la mesh non sia uniforme, e tenda a infittirsi in prossimità della bobina (cioè proprio dove si suppone che i campi varino più velocemente).
Figura 4.3: Definizione della mesh non uniforme lungo il piano XY( riquadratura giallo), piano
YZ(riquadratura azzurra), piano XZ(riquadratura viola).
3.4 Birdcage coil
Come discusso nei capitoli precedenti le Birdcage coils (cfr. parg. 1.5) sono bobine di volume, caratterizzate da conduttori verticali denominati rod e da due anelli circolari denominati end-ring (figura 1.4.5), al cui interno viene posizionato il campione da esaminare. Queste birdcage coil sono le più utilizzate grazie alla loro capacità di generare un campo B1 altamente omogeneo su di un grande volume all’interno della bobina [43]. Verificare questa omogeneità di campo magnetico all’interno del volume di interesse è stato uno degli obbiettivi della tesi. Le simulazioni sono state eseguite con il software CFDTD (cfr. parg. 3.1) sia in condizione di bobina scarica che in condizione di bobina carica, al fine di valutare le variazioni dei campi elettrico e magnetico indotte in presenza di un fantoccio, con caratteristiche elettriche medie uguali al tessuto biologico reale di cui si vuole valutare l’assorbimento elettromagnetico.
L’alterazione del campo elettrico produce come conseguenza alterazioni del SAR (vista la sua relazione di proporzionalità ,vedi cap. 1) .
3.4.1 Simulazione Birdcage coils
L’obbiettivo di tale simulazione era quello di verificare un’elevata omogeneità di campo magnetico proprio di una birdcage coil reale, le simulazioni sono state eseguite con il software Parallel CFDTD. Nel software non esisteva una struttura così complessa propria di una birdcage coil, quindi il primo obbiettivo di questo studio era realizzare una struttura geometrica che assomigliasse ad una birdcage coil reale, comunque verificando che il campo magnetico fosse comunque omogeneo al suo interno.
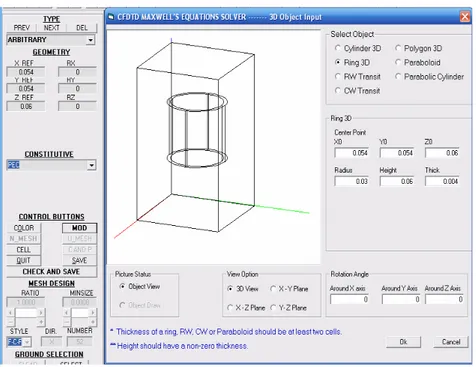
La struttura è stata realizzata definendo una geometria arbitraria (ARBITRARY), definendo (Select Object), Ring3D, ed impostando opportunamente i parametri che il softwere richiedeva (raggio, altezza, spessore, figura 4.4).
Figura 4.4: Definizione della geometria Birdcage coil nel software CFDTD.
Nella successiva figura (4.5) illustriamo le caratteristiche della simulazione:
Figura 4.5: Caratteristiche della simulazione di una birdcage coil con il (CFDTD).
• in bianco lo spazio di lavoro
• in rosso la birdcage coil caratterizzata da quattro rod, e due end-ring
• in giallo la sorgente di eccitazione circolare
• in rosa il piano di output dove calcolare campi elettrici e magnetici.
La scelta di una sorgente di eccitazione circolare, è stata dettata da una maggiore omogeneità di campo magnetico all’interno del volume di interesse, si tratta di una sorgente di eccitazione per mezzo di una struttura guidante circolare.
Il modo fondamentale con cui eccitare un’antenna horn (visto che tale struttura è stata ottenuta da un’antenna horn) a sezione circolare è il modo TE11. Tale sorgente garantisce la medesima ampiezza all’ imbocco della guida di irradiazione e il livello dei lobi laterali risulta minimo. Per aggiungere l’alimentazione con il modo TE11 è stato selezionato circular_source e impostato il tipo a circular_wg_TE11_z.
La guida di alimentazione è stata troncata per mezzo di una terminazione nel dominio computazionale, comunque visto che nel nostro studio non è richiesto il calcolo dei diagrammi di irradiazione in campo lontano la guida potrebbe essere chiusa con le condizioni PML che simulerebbe correttamente la guida infinita.
Una volta inseriti nell’ambiente 3D di lavoro gli oggetti da simulare, è necessario definire la mesh spaziale; questa operazione, come già accennato nel paragrafo 3.1, assume un ruolo molto importante per la buona riuscita della simulazione. Una buona mesh deve rispettare le caratteristiche descritte precedentemente nel (paragrafo 3.3), anche in questo caso per ridurre il costo computazionale abbiamo deciso di utilizzare una mesh non uniforme; la mesh risulterà più fitta laddove i campi variano più velocemente.
3.4.2 Simulazione Birdcage coils da otto rod con ritardo di fase.
L’obbiettivo di tale studio era quello di simulare una birdcage coil caratterizzata da otto rod da utilizzare all’interno del software CFDTD.
Per la realizzazione di una birdcage coil da otto rod ( conduttori verticali) sono state definite due geometrie ( arbitrary) (cfr. parg. 3.2) sulla stessa localizzazione spaziale lungo le cordinate x e y, mentre lungo la direzione z sfasate di 45° in modo da garantire che i rod risultino equidistanti e il campo magnetico abbastanza omogeneo (vedi parg. 1.5.4, capitolo 1).
Caratteristiche della simulazione:
Figura 4.7: Birdcage coil ad otto rod con ritardo di fase.
• in rosso birdcage coil;
• in rosa piano di output;
• in bianco ambiente di lavoro che simula lo spazio libero;
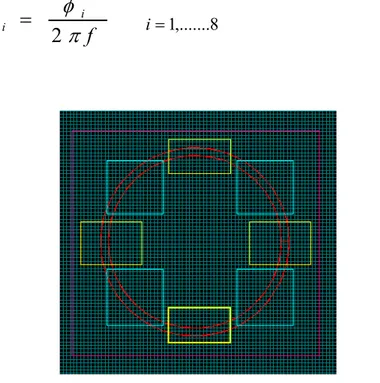
Al fine di valutare il campo magnetico interno alla birdcage coil si è deciso di alimentare la birdcage coil ad ogni rod (conduttore verticale, vedi figura 4.7) per mezzo di un loop di campo magnetico (figura 3.9) nella direzione concorde ai rod13.Tali sorgenti hanno un comportamento simile a quello di un generatore di corrente nella direzione in cui vengono poste. Lo sfasamento temporale viene definito dalle seguente relazione:
f
t
i iπ
φ
2
=
i=1,...8 (3.2)Figura 4.8: Ritardo di fase di una Birdcage coil ad otto rod, sfasamento sorgenti gialle
di 90° , sfasamento nel passaggio da una sorgente gialla ad azzurra 45°.
dove per ogni i si ha un incremento in fase di 45°. Nota la frequenza di stimolazione nel nostro caso pari a 100MHz è stato possibile determinare la traslazione in fase per ogni conduttore. Questi ritardi vengono impostati via software nella voce (delay) relativa alle sorgenti di eccitazione (figura 4.9)
Figura 4.9: Impostazione sul Ritardo di fase di una Birdcage coil ad otto rod, SOURCE-
COMPOMENT- DELAY in picosecondi.
3.4.3 Simulazione di una Birdcage coil con Fantoccio non
omogeneo.
L’obbiettivo di tale simulazione era quello di verificare l’assorbimento elettromagnetico in un fantoccio non omogeneo. Il fantoccio definito per mezzo del programma Parallel CFDTD risulta essere stratificato, in particolare caratterizzato da tre interfacce:
La prima interfaccia è sferica che simula l’involucro esterno della testa. Tale geometria è stata definita per mezzo di un programma CAD (GID), ed importata nel programma Parallel CFDTD definendo un file .TRI. La seconda interfaccia è cilindrica che simula regioni interne al cranio, questa interfaccia a differenza della prima è stata definita proprio nel parallel CFDTD, impostando opportunamente i parametri richiesti per la definizione del cilindro.
La terza interfaccia è puramente elettrica (PEC), questo conduttore elettrico perfetto potrebbe essere assimilato a protesi metalliche interne al cranio, o cateteri, o qualunque mezzo di svariata forma in grado di alterare il campo interno alla birdcage coil.
Caratteristiche della simulazione ( figura5 ):
Figura 5: Caratteristiche della simulazione di una birdcage coil caricata.
• in rosso birdcage coil con otto rod;
• in giallo la sorgente di eccitazione circolare; • in rosa i piani di output;
• in bianco ambiente di lavoro che simula lo spazio libero;
Caratteristiche dielettriche del fantoccio non omogeneo
• in verde un tessuto biologico sintetico (fantoccio), sfera definita di materiale dielettrico caratterizzato da una costante dielettrica relativa pari ad 80 , ed una conducibilità pari ad 0.6 [S]/[m] (propria della pelle e derma)
• in azzurro all’interno del materiale sintetico è presente un altro materiale dielettrico caratterizzato da una costante dielettrica relativa a 60, ed una conducibilità pari a 0.8 [S]/[m] . (propria di strutture interne)
• in giallo all’interno del materiale sintetico è presente un materiale elettrico perfetto (PEC), che simula il comportamento di una protesi metallica o di una scheggia metallica all’interno dell’oggetto.
Una volta inseriti gli oggetti nell’ambiente 3D di lavoro è necessario definire la mesh spaziale; questa operazione, come già accennato nel (paragrafo 3.1), assume un ruolo molto importante per la buona riuscita della simulazione.
Una buona mesh come evidenzia deve rispettare le caratteristiche descritte precedentemente nel (paragrafo 3.3), anche in questo caso per ridurre il costo computazionale abbiamo deciso di utilizzare una mesh non uniforme (figura 5.4).
Figura 5.1: Caratteristiche della mesh nei piani XY-YZ-XZ( da sinistra a destra rispettivamente),
3.5 Simulazione di una Bobina Superficiale con fantoccio
omogeneo del cuore.
L’obbiettivo di tale simulazione era quello di verificare l’assorbimento di potenza elettromagnetica in un fantoccio omogeneo della forma il più simile a quella di un tessuto biologico reale.
Il fantoccio dalla forma a ‘cuore’ è nella realtà un vero e proprio modello numerico definito in CAD, ed importato nell’ambiente di lavoro del Parallel CFDTD come un file .TRI. Il fantoccio è stato definito come materiale elettrico costituito con un valore di permittività pari ad 80 ed un valore di conducibilità pari a 0.6 S/m, tipici di un fantoccio RM.
Caratteristiche della simulazione sono evidenziate in figura 5.2:
Figura 5.2: Caratteristiche della simulazione con Modello Numerico omogeneo.
• in verde la bobina superficiale; • in giallo la sorgente di eccitazione; • in rosa i piani di output;
• in rosso il modello numerico(Tessuto Biologico Sintetico), della forma caratteristica del cuore.
Una volta inseriti gli oggetti nell’ambiente 3D di lavoro è necessario definire la mesh spaziale; questa operazione, come già discusso precedentemente, assume un ruolo molto importante per la buona riuscita della simulazione.
Una buona mesh deve rispettare le caratteristiche descritte precedentemente nel (paragrafo 3.3), anche in questo caso per ridurre il costo computazionale abbiamo deciso di utilizzare una mesh non uniforme (figura 5.3).
Figura 5.3: Caratteristiche della Mesh nel piano X-Y,Y-Z.
Figura 5.4: Caratteristiche della Mesh nel piano X-Z
3.6 Simulazione di una Bobina Superficiale con fantoccio
omogeneo del torace.
L’obbiettivo di tale simulazione era quello di verificare l’assorbimento di potenza elettromagnetica in un fantoccio omogeneo della forma il più simile a quella di un tessuto biologico reale. Come modello numerico di fantoccio è stato preso questa volta un torace (thorax.tri) definito in CAD, ed importato nell’ambiente di lavoro del Parallel CFDTD come un file .TRI. Il fantoccio è stato definito come materiale elettrico costituito con un valore di permittività pari ad 80 ed un valore di conducibilità pari a 0.6 S/m, tipici di un fantoccio RM.
Caratteristiche della simulazione sono evidenziate in figura 5.5:
Figura 5.5: Caratteristiche della simulazione con Modello Numerico(del torace)
• in verde la bobina superficiale; • in giallo la sorgente di eccitazione; • in rosa i piani di output;
• in bianco ambiente di lavoro che simula lo spazio libero;
• in azzurro il Modello Numerico(Tessuto Biologico Sintetico), della forma caratteristica di un torace;
La mesh spaziale risulta essere non uniforme al fine di ridurre il costo computazionale, rispettando le proprietà descritte nel (paragrafo 3.3).
Una buona mesh come evidenzia deve rispettare le caratteristiche descritte precedentemente nel (paragrafo 3.3), anche in questo caso per ridurre il costo computazionale abbiamo deciso di utilizzare una mesh non uniforme (figura 5.6).
Figura 5.6: Caratteristiche della Mesh nel piano XY-Y-Z
Figura 5.7: Caratteristiche della Mesh nel piano X-Z.
Per mezzo di un programma in Matlab è stato possibile determinare l’andamento del modulo del campo elettrico generato dalla bobina superficiale e successivamente stimare il SAR mediato su tale geometria.
Inoltre è stato effettuato un confronto tra i SAR ottenuti variando la frequenza di stimolazione (64-128MHz). Il prossimo capitolo evidenzierà i risultati ottenuti con l’utilizzo del solver CFDTD.