Capitolo 4
Analisi dei risultati
4.1 Descrizione qualitativa dei grafici ottenuti per ogni prova
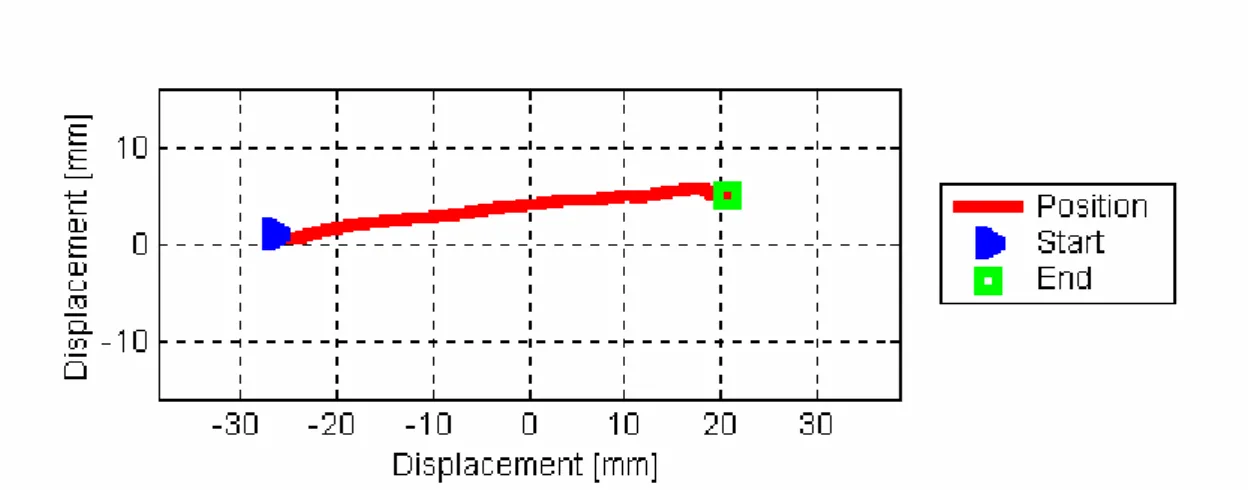
Per ogni prova sono stati sviluppati vari grafici riguardanti le forze di interazione, la traiettoria del dito sulla superficie, la variazione della derivata della forza tangenziale. Dai grafici relativi alle traiettorie (figura 4.1) è possibile stabilire se l’andamento del dito sulla superficie da analizzare è stato coerente con la direzione specificata nel protocollo; per quel che riguarda questi grafici si può dire che la traiettoria da seguire veniva rispettata, anche se in alcuni casi poteva essere presente una leggera flessione verso i bordi laterali dovuta al fatto che i soggetti erano bendati.
Figura 4.1: Grafico di una traiettoria di esplorazione di un soggetto
Dai grafici che riguardano le forze di interazione è possibile avere una conferma su quanto osservato dai grafici relativi alle traiettorie; infatti è possibile vedere come il valore della forza relativa all’asse Y, coincidente con la direzione di esplorazione della superficie, abbia un valore superiore in modulo rispetto alla forza di interazione relativa al perpendicolare asse X, che ha un valore vicino a 0. Questo significa che i soggetti non applicano forza lungo la direzione dell’asse X, ma solo in direzione dell’asse Y come è confermato dai grafici delle traiettorie.
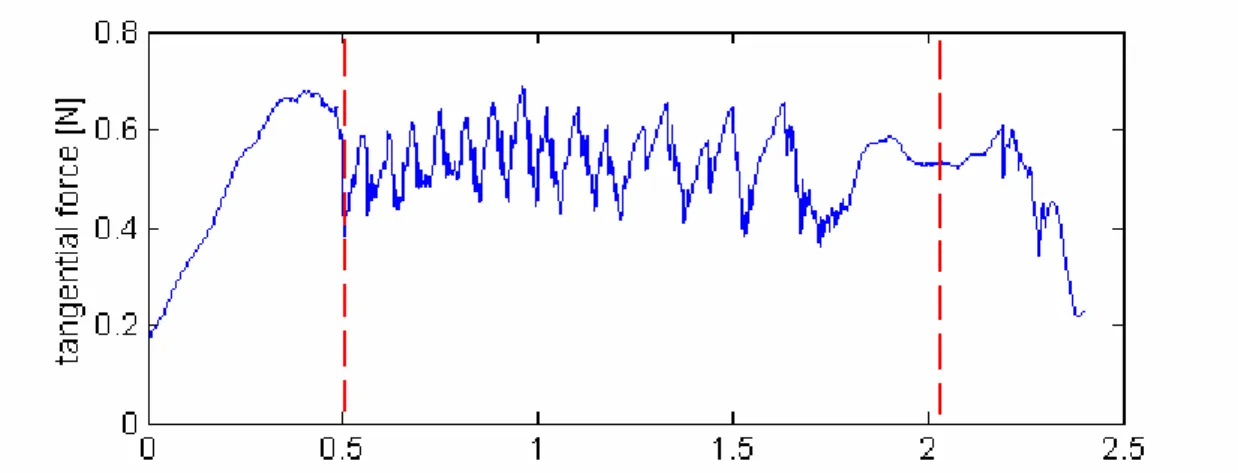
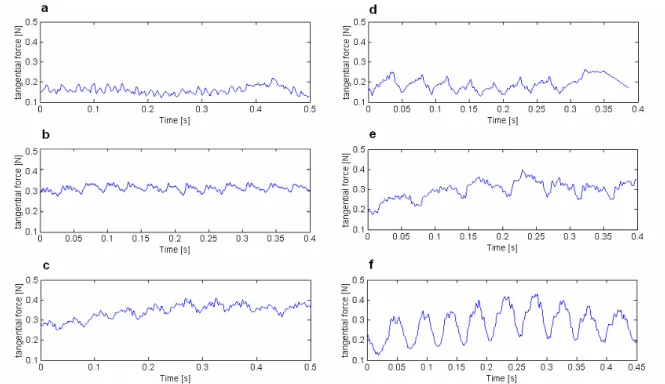
Analizzando in particolare i grafici relativi alla forza tangenziale nel tempo (Figura 4.2), di solito è possibile notare una fase iniziale dove si ha un aumento della forza applicata. La forza aumenta fino a raggiungere un picco per poi scendere leggermente subito dopo, nella fase successiva sono presenti invece delle fluttuazioni in successione. Da notare che queste fluttuazioni variano nel passare dalle superfici con spaziatura minore a quelle con spaziatura maggiore, come mostrato negli studi di Smith[19]. Nel caso di superfici con spaziatura minore si hanno piccole fluttuazioni ad alta frequenza e man a mano che il periodo spaziale aumenta si hanno fluttuazioni con valori di maggiore ampiezza a più bassa frequenza (figura 4.3). In alcuni casi è possibile notare un’ultima fase dove si ha una diminuzione del valore relativo alla forza tangenziale, tale valore diminuisce a causa del rallentamento del dito dopo lo “stop” ordinato dallo sperimentatore. L’andamento della forza tangenziale nella prima fase può essere spiegato come l’aumento di forza che ci vuole per vincere la resistenza che il dito incontra prima di muoversi dovuta all’attrito statico. Le successive fluttuazioni sono dovute agli elementi in rilievo che il dito incontra durante il percorso. La morfologia delle fluttuazioni va ad influenzare l’ampiezza e la frequenza dei picchi presenti nei grafici relativi alla derivata della forza tangenziale, con l’aumentare della spaziatura i picchi aumentano di ampiezza e diminuiscono di frequenza (figura 4.4).
Figura 4.2: grafico della forza tangenziale, le linee tratteggiate stanno ad indicare le varie fasi in cui può essere diviso l’andamento del segnale
Figura 4.3: Particolare delle fluttuazioni delle forze tangenziali per tutte le tipologie di superficie (a: SP = 1.6 mm, b: SP = 2.1 mm, c: SP = 2.6 mm, d: SP = 3.1 mm, e: SP = 3.6
mm, f: SP = 4.1 mm)
Figura 4.4: grafici relativi alla derivata della forza tangenziale relativi ai grafici presentati nella figura precedente (a: SP = 1.6 mm, b: SP = 2.1 mm, c: SP = 2.6 mm, d: SP = 3.1 mm,
4.2 Risultati relativi al valore di RMS per i soggetti
I soggetti sottoposti alle prove sono stati 11, 3 donne e 8 maschi, per un range di età che va da 25 ai 35 anni circa. Il soggetto veniva considerato in grado di discriminare tra una superficie con una determinata spaziatura e quella di riferimento, quando la percentuale di risposte corrette di discriminazione relative all’esplorazione della superficie erano superiori al 50%, dato che le prove per ogni superficie erano 7, il riconoscimento doveva essere avvenuto almeno 4 volte sulle 7 totali.
Tra i vari soggetti la discriminazione non avviene sempre in corrispondenza della stessa superficie, la maggior parte dei soggetti inizia a discriminare dalla superficie con spaziatura di 2.6 mm, ma ci sono soggetti in grado di discriminare già dalla superficie con spaziatura 2.1 mm, quella immediatamente successiva alla superficie di riferimento. Solo un soggetto inizia a discriminare dalla superficie con spaziatura 3.1 mm. Per tutti i soggetti la percentuale di risposte corrette al riconoscimento tende a salire, come era prevedibile, man a mano che aumenta il valore della spaziatura nella superficie, ovvero si arriva sempre a un valore di riconoscimento del 100% per le superfici con spaziature più alte di quella di prima discriminatura.
Il valore medio di RMS della derivata della velocità tangenziale in quasi tutti i soggetti ha un andamento crescente con l’aumentare del valore di spaziatura. Il valore di RMS medio, relativo allo stesso piattino, varia da soggetto a soggetto. Questo dipende dal fatto che ognuno esplora le superfici in maniera personalizzata, applicando le forze che ritiene più opportune. Quindi per poter fare un confronto tra i vari soggetti i risultati relativi a questo valore vanno normalizzati. Di seguito vengono presentati i risultati per ogni soggetto, compresi i dati relativi anche ad altri parametri di interazione del soggetto con la superficie. In particolare vengono mostrati i dati relativi alle velocità di esplorazione medie per ogni superficie per vedere se la spaziatura presente sulla superficie ha un influenza su questo parametro e per vedere se esiste una correlazione tra il valore di RMS della variazione della forza tangenziale e la velocità di esplorazione.
4.2.1 Soggetto 1
Il soggetto 1 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento dello 14% circa, riesce a discriminare la superficie con spaziatura di 2.6 mm con una percentuale di
riconoscimento del 71%, la superficie con spaziatura di 3.1 mm viene riconosciuta con una percentuale del 86% di risposte giuste, le altre superfici vengono riconosciute con percentuale del 100%.
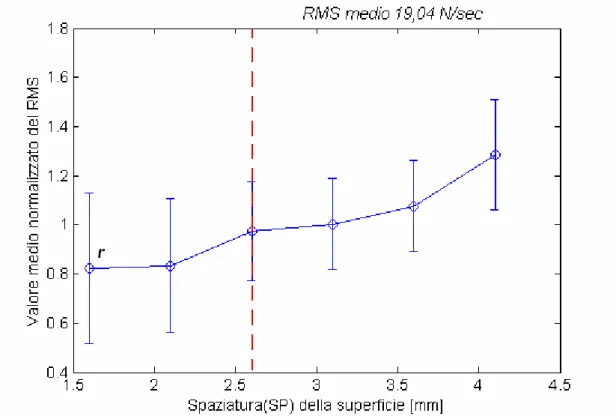
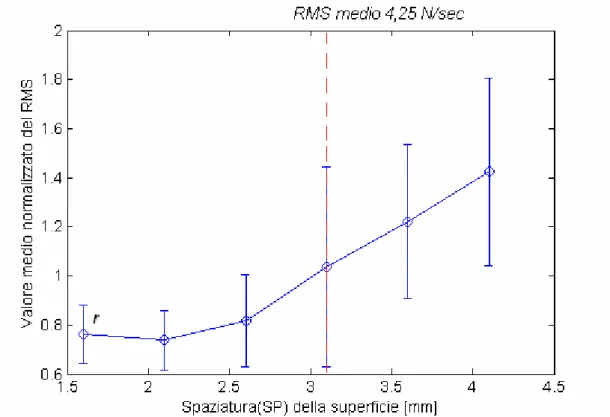
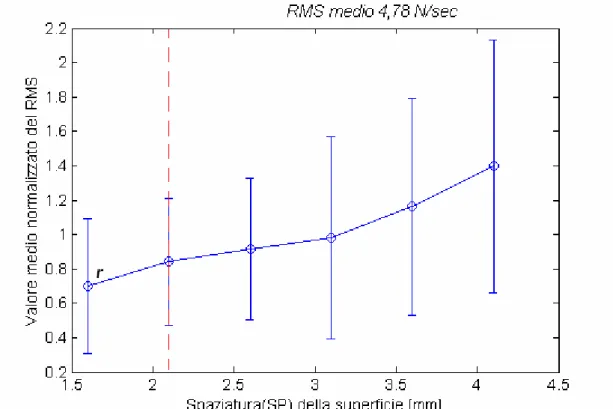
In figura 4.5 viene mostrato come varia il valore di RMS medio normalizzato con il corrispettivo valore di deviazione standard al variare della spaziatura della superficie.
Figura 4.5: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 1. La “r” sta ad indicare il valore per la superficie
di riferimento, la linea tratteggiata da dove avviene il riconoscimento. Sopra il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione.
Nel caso del soggetto 1 si può vedere come all’aumentare del valore di spaziatura aumenta il valore medio di RMS della derivata della forza tangenziale; tra la superficie di riferimento e la superficie con spaziatura immediatamente successiva si può notare come i valori siano simili tra loro infatti in questo caso il riconoscimento tra queste due superfici non avviene. Questo avviene per le superfici con maggiore spaziatura che hanno anche una maggiore e più evidente differenza di RMS rispetto alla superficie di riferimento. Il passaggio da una situazione in cui il soggetto non era in grado di discriminare a quella di avvenuta discriminazione è evidenziata dal salto di valore del RMS medio.
In tabella 4.1 vengono mostrati i valori relativi alla differenza tra il valore di RMS normalizzato relativo alla superficie di riferimento e quello relativo alle altre superfici, questa differenza è stata chiamata per comodità “gap percettivo”.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0106 0.1513 0.1752 0.2529 0.4622 Tabella 4.1
In questo caso il soggetto non è in grado di discriminare subito la superficie con spaziatura di 2.1 mm; infatti il gap percettivo risulta molto basso. Il valore di gap percettivo per cui si ha il riconoscimento è di circa 0.151 per la spaziatura di 2.6mm. Per questo soggetto si potrebbe affermare, dai dati a disposizione, che il gap percettivo soglia, che in queste prove si considera il valore del gap percettivo che permette di avere una percentuale di risposte corrette pari al 50%, che permette cioè la discriminazione tra superfici diverse, si trova tra un valore di gap pari a circa 0.011 e uno pari a 0.151.
Nella tabella 4.2 vengono mostrati i dati relativi alla velocità media di esplorazione in relazione al valore di spaziatura.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 91.3 97.2 94.8 99.8 103.2 88.9 Tabella 4.2
In media il valore di velocità di esplorazione fra tutte le prove di questo soggetto risulta pari a 95.9 mm/sec, come si può vedere non c’è una evidente correlazione tra il valore della velocità media per ogni superficie e i valori di spaziatura; infatti il coefficiente di correlazione tra queste due serie di valori risulta pari a 0.11. Il coefficiente di correlazione tra il valore di RMS e la velocità per questo soggetto risulta pari a – 0.18, un valore negativo, che farebbe pensare a una correlazione negativa, dal modulo basso comunque si può affermare che non c’è correlazione.
4.2.2 Soggetto 2
Il soggetto 2 non è in grado di riconoscere la differenza tra la superficie di riferimento e le superfici con spaziatura di 2.1 mm e 2.6 mm, avendo una percentuale di riconoscimento rispettivamente dello 0% e 43% circa. Riesce a discriminare la superficie con spaziatura di 3.1 mm con una percentuale dello 86%, quelle con spaziatura maggiore sono discriminate con una percentuale di riconoscimento del 100%.
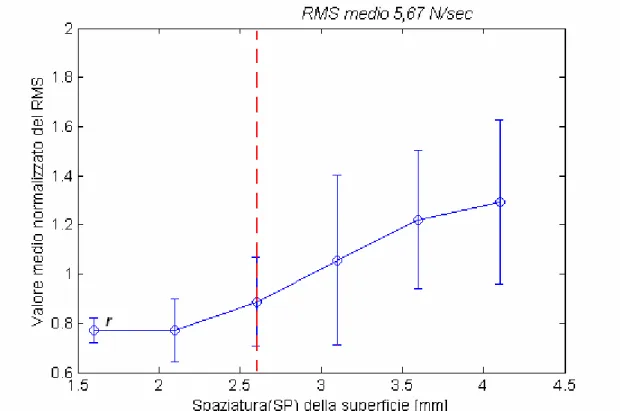
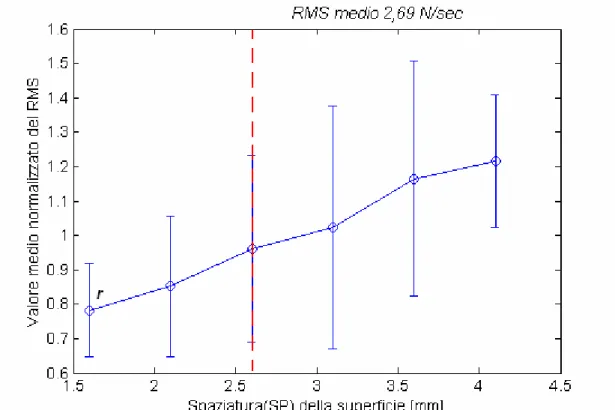
Figura 4.6: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 2. La “r” sta ad indicare il valore per la superficie
di riferimento, la linea tratteggiata da dove avviene il riconoscimento. Sopra il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Il grafico in figura 4.6 mostra come varia il valore di RMS normalizzato al variare della spaziatura delle superfici per il soggetto 2, in questo caso si può vedere come i primi tre punti corrispondenti alle 3 superfici con spaziatura minore abbiano valore simile di RMS medio, avendo valori così simili alla superficie di riferimento le superfici con spaziatura di 2.1 mm e di 2.6 mm non vengono di conseguenza riconosciute come dissimili da questa. Da notare che il valore corrispondente alla superficie con spaziatura di 2.1 mm è minore
rispetto a quello corrispondente al riferimento, la differenza tra i due però è da considerarsi piccola e impercettibile per il soggetto che infatti considera le due superfici uguali.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No No Si Si Si Gap percettivo -0.0254 0.0541 0.2711 0.4582 0.6600 Tabella 4.3
Dai dati mostrati in tabella 4.3 si può affermare che il gap percettivo nei primi due casi risulta troppo basso in modulo per essere tale da permettere la percezione da parte del soggetto del fatto che stanno esplorando superfici diverse dal riferimento. Il riconoscimento avviene in corrispondenza della superficie con spaziatura di 3.1 mm per un gap percettivo pari a 0.271 circa. Il valore soglia per questo soggetto si trova quindi tra un valore di gap percettivo pari a 0.054 e un valore di 0.271 circa.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 46.3 46.7 41.9 48.2 61.8 68.7 Tabella 4.4
La velocità media per il soggetto 2 nell’esplorazione delle superfici risulta essere di 52,3 mm/sec. In tabella 4.4 si può osservare, eccetto nel caso della superficie con spaziatura pari a 2.6 mm, come all’aumentare della spaziatura aumenti il valore della velocità media, sembra ci sia una correlazione positiva tra i due parametri, il valore del coefficiente risulta uguale a 0.83, un valore alto quindi una correlazione alta. Anche andando a valutare il coefficiente di correlazione tra il RMS e la velocità media, questo risulta pari a 0.94, c’è una correlazione forte.
4.2.3 Soggetto 3
Il soggetto 3 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento dello 0%,
riesce a discriminare la superficie con spaziatura di 2.6 mm con una percentuale dello 86%, quelle con spaziatura maggiore sono discriminate con una percentuale di riconoscimento del 100%.
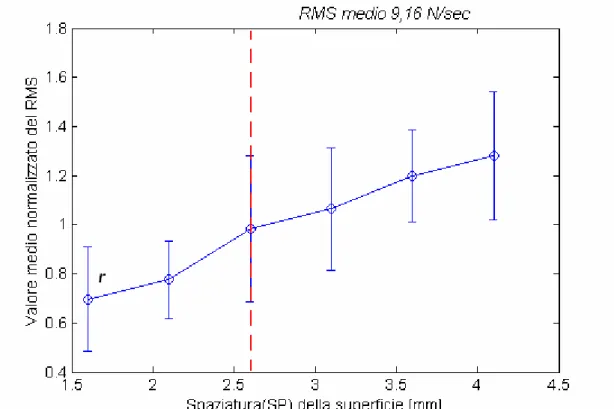
In figura 4.7 viene mostrato il grafico dei valori di RMS per il soggetto 3.
Figura 4.7: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 3. La r sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra il
grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Il soggetto 3 non è in grado di riconoscere la superficie con spaziatura di 2.1 mm; infatti come si può vedere dal grafico in figura 4.7 il valore medio di questa superficie è circa identico al valore riferibile alla superficie di riferimento, il valore che si riferisce alla superficie con spaziatura di 2.6 mm si discosta maggiormente da quello di riferimento e quindi c’è un grosso salto nel valore medio del RMS nel passare dalla superficie non riconosciuta a quella dove avviene il riconoscimento.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo -0.0006 0.1159 0.2856 0.4501 0.5200 Tabella 4.5
Dai dati in tabella 4.5 riferiti al soggetto 3 si può osservare che il gap percettivo risulta essere negativo per la superficie con spaziatura pari a 2.1 mm, però anche in questo caso, come nel caso del soggetto precedente, il valore risulta essere in modulo troppo piccolo per essere riconosciuto dal soggetto, che considera infatti le due superficie uguali. In questo caso il valore del RMS corrispondente alla prima superficie riconosciuta è di circa 0.116, si può dire che per questo soggetto il valore della soglia percettiva è minore di questo valore.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 51.3 68.8 58.9 56.9 67.7 56.8 Tabella 4.6
Il valore della velocità media di esplorazione è pari a 60.1 mm/sec. Dai valori mostrati in tabella 4.6 si può vedere come in questo caso l’andamento della velocità media sembri non seguire l’aumentare della spaziatura i valori non sono correlati; infatti il valore del coefficiente di correlazione tra queste due serie di valori è pari a 0.17. Il coefficiente di correlazione invece tra il RMS e la velocità di esplorazione è pari a 0.09, un valore molto basso, la correlazione è quasi nulla.
4.2.4 Soggetto 4
Il soggetto 4 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm conseguendo una percentuale di riconoscimento dello 0%, riesce invece a discriminare la superficie con spaziatura di 2.6 mm con una percentuale dello 86%, quelle con spaziatura maggiore sono discriminate con una percentuale di riconoscimento del 100%.
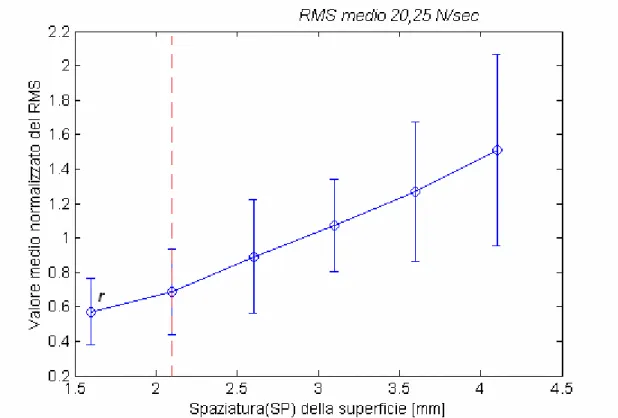
Figura 4.8: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 4. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Per quel che riguarda il grafico in figura 4.8, riferibile al soggetto 4, anche in questo caso molto probabilmente il gap di differenza tra la superficie di riferimento e la superficie con spaziatura immediatamente successiva non è tale da permettere un riconoscimento del fatto che le due superfici siano diverse. Da notare il salto ben visibile del valore di RMS medio nel passare dalla superficie con spaziatura di 2.1 mm a quella con spaziatura di 2.6 mm a conferma che da questo ultimo tipo di superficie inizia il riconoscimento.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0787 0.2877 0.3672 0.5014 0.5849 Tabella 4.7
Per quanto riguarda i dati riportati in tabella 4.7 riguardanti il gap percettivo si può osservare un più consistente gap percettivo rispetto ai soggetti precedenti pari a circa 0.078 riscontrabile in corrispondenza della superficie non riconosciuta. Il soggetto inizia a distinguere tra la superficie di riferimento e le altre superfici a partire da un gap percettivo pari a 0.288, in questo caso si può dire che la soglia percettiva è compresa tra un valore di 0.078 e 0.288 circa. Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 20.0 24.5 24.5 24.6 26.9 31.7 Tabella 4.8
La velocità media di esplorazione in questo caso è pari a 25,4 mm/sec. Osservando la tabella 4.8 si può notare come all’aumentare della spaziatura il valore della velocità media di esplorazione tenda, il coefficiente di correlazione è infatti alto pari a 0.92. Il valore del coefficiente di correlazione tra il RMS e la velocità risulta pari a 0.88, quindi un valore abbastanza alto di correlazione anche in questo caso.
4.2.5 Soggetto 5
Il soggetto 5 è in grado di discriminare già la superficie con spaziatura 2.1 mm rispetto a quella di riferimento con spaziatura di 1.6 mm, in questo caso la percentuale di riconoscimento avvenuto è di circa il 57%. Per superfici con spaziatura superiore la percentuale di riconoscimento risulta essere del 100%.
Figura 4.9: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 5. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Il grafico in figura 4.9 relativo al soggetto 5 ha un andamento molto lineare, il soggetto in questa serie di prove è in grado di riconoscere tutte le superfici, anche se per quanto riguarda la prova relativa alla superficie con spaziatura di 2.1 mm la superficie risulta essere riconosciuta con una percentuale di riconoscimento solo leggermente superiore al 50%, quindi in una situazione leggermente al limite. Il salto del valore medio di RMS nel passare dalla superficie di riferimento a quella con spaziatura immediatamente successiva è comunque abbastanza evidente, e simile ai salti successivi nel passaggio dal valore relativo a una superficie a quello relativo alla superficie con spaziatura immediatamente successiva.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione Si Si Si Si Si Gap percettivo 0.1158 0.3220 0.5028 0.6976 0.9404 Tabella 4.9
Come si può osservare in tabella 4.9 il riconoscimento avviene subito in corrispondenza della prima superficie diversa dal riferimento, il valore del gap percettivo è pari circa a 0.116, il valore della soglia percettiva è quindi inferiore a questo valore.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 51.3 95.1 68.0 87.6 70.3 75.7 Tabella 4.10
La velocità media di esplorazione in questo caso è pari a 74,7 mm/sec. Osservando la tabella 4.10 si può notare come il valore della velocità non vari in modo molto lineare rispetto al valore della spaziatura, il coefficiente di correlazione in questo caso è pari a 0.23, un valore basso. Anche il valore del coefficiente di correlazione tra il RMS e la velocità è un valore molto basso di correlazione, risulta pari a 0.17.
4.2.6 Soggetto 6
Il soggetto 6 è in grado di discriminare già la superficie con spaziatura 2.1 mm rispetto a quella di riferimento con spaziatura di 1.6 mm la percentuale di risposte giuste è di circa il 86% in questo caso; per superfici con spaziatura superiore la percentuale di riconoscimento risulta essere del 100%.
Figura 4.10: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 6. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Dal grafico dei valori di RMS relativo al soggetto 6 si può vedere come da subito c’è un salto nel passare dal valore relativo alla superficie di riferimento con spaziatura 1.6 a quello relativo alla spaziatura di 2.1 mm; infatti il soggetto riconosce da subito la superficie. I valori del grafico inoltre tendono sempre ad aumentare con il crescere della spaziatura. Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione Si Si Si Si Si Gap percettivo 0.1403 0.2172 0.2801 0.4613 0.6953 Tabella 4.11
Il soggetto 6 inizia a distinguere in corrispondenza di un gap percettivo pari a 0.14, per superfici con una spaziatura pari a 2.1 mm si tratta del gap percettivo rilevato più alto tra i soggetti analizzati. Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 15.0 14.3 18.4 21.1 19.8 27.3 Tabella 4.12
Il valore della velocità media di esplorazione è pari a 19.3 mm/sec. Dai valori mostrati in tabella 4.12 si può vedere come in questo caso l’andamento della velocità media sembri non seguire l’aumentare della spaziatura, però rispetto ai casi precedenti i valori che non aumentano con l’aumentare della spaziatura si discostano di molto poco rispetto ai precedenti, infatti il valore di correlazione in questo caso risulta alto pari a 0.91. Il coefficiente di correlazione tra il RMS e la velocità di esplorazione è pari a 0.92, un valore molto simile all’altro, la correlazione anche in questo caso è alta.
4.2.7 Soggetto 7
Il soggetto 7 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento del 43% circa, riesce a discriminare la superficie con spaziatura di 2.6 mm con una percentuale di riconoscimento del 71%, le altre superfici vengono riconosciute con percentuale del 100%.
Figura 4.11: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 7. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Dal grafico in figura 4.11 relativo al soggetto 7 sembra che il soggetto riesca a riconoscere dalla prima superficie diversa dal riferimento, in realtà non è in grado di riconoscere la prima superficie diversa. Da notare però che in corrispondenza di questa superficie la percentuale di riconoscimento è solo leggermente inferiore al 50% quindi il soggetto si trova in una situazione al limite del riconoscimento.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0703 0.1788 0.2405 0.3817 0.4328 Tabella 4.13
Il riconoscimento per il soggetto 7 avviene ad un gap percettivo pari a 0.179, il gap percettivo relativo alla superficie non riconosciuta ha un valore 0.700, si potrebbe
affermare che il gap soglia limite che permette il riconoscimento corrisponde si trova tra un valore di 0.07 e 0.179 per questo soggetto (tabella 4.13).
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 23.1 19.2 20.7 22.3 25.3 21.1 Tabella 4.14
Dai valori mostrati in tabella 4.14 sembra che l’andamento della velocità media non segua l’aumentare della spaziatura, il coefficiente risulta pari a 0.25. Il valore della velocità media di esplorazione è pari a 22.0 mm/sec. Il coefficiente di correlazione tra il RMS e la velocità di esplorazione è pari a 0.32 un valore non molto alto.
4.2.8 Soggetto 8
Il soggetto 8 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento del 14% circa, riesce a discriminare la superficie con spaziatura di 2.6 mm con una percentuale di riconoscimento del 71%, le altre superfici vengono riconosciute con percentuale del 100%. In figura 4.12 viene mostrata il grafico relativo al variare del valore del RMS in relazione della spaziatura della superficie analizzata per il soggetto 8.
Figura 4.12: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 8. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Il soggetto 8 non riconosce la superficie con spaziatura di 2.1 mm rispetto al riferimento e inizia a riconoscere dalla superficie con spaziatura pari a 2.6 mm; infatti come si può vedere dal grafico il valore medio del RMS nel passare dalla superficie con spaziatura pari a 2.1 mm a quella con spaziatura pari a 2.6 mm subisce un leggero salto, il soggetto quindi risente di questo gap percettivo passando da uno stato in cui non c’è riconoscimento allo stato dove invece si ha riconoscimento. Questo grafico sembra simile a quello che si riferisce al soggetto 5 solo che in quel caso il soggetto era in grado di discriminare dalla prima superficie diversa, in questo caso dalla seconda, molto probabilmente in questo caso però la differenza tra il valore medio di RMS del riferimento e la prima superficie diversa non doveva essere della stessa entità che nel caso del soggetto 5, come è confermato in tabella 4.15.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0667 0.2049 0.3093 0.4419 0.5731 Tabella 4.15
La superficie con spaziatura pari a 2.1 mm non viene riconosciuta dal soggetto. A questa superficie corrisponde un gap percettivo pari a 0.067 circa. La superficie con spaziatura immediatamente successiva viene riconosciuta dal soggetto, il gap percettivo corrispondente a questa superficie è pari a 0.205 circa, il valore di gap soglia si trova quindi tra 0.067 e 0.205 circa.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 51.3 58.1 53.6 50.8 55.3 59.1 Tabella 4.16
La velocità media di esplorazione in questo caso è pari a 54,7 mm/sec. Osservando la tabella 4.16 si può notare come il valore della velocità non vari in modo molto lineare rispetto al valore della spaziatura, il valore del coefficiente di correlazione tra questi valori risulta infatti pari a 0.43. Il valore del coefficiente di correlazione tra il RMS e la velocità risulta pari a 0.42, una correlazione non molto alta.
4.2.9 Soggetto 9
Il soggetto 9 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento del 42% circa, riesce a discriminare la superficie con spaziatura di 2.6 mm e le altre superfici con spaziatura superiore con una percentuale di riconoscimento del 100%.
Figura 4.13: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 9. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Per quanto riguarda il grafico in figura 4.13 relativo al soggetto 9 non c’è un gap evidente nel passare dalla superficie dove non avviene riconoscimento a quella successiva dove invece questo avviene, molto probabilmente in questo caso conviene guardare il gap di valore del RMS tra la superficie di riferimento e superficie con spaziatura pari a 2.6 mm, questo valore deve essere tale da permettere il riconoscimento delle superficie.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0720 0.1911 0.3953 0.4795 0.5933 Tabella 4.17
Osservando la tabella 4.17, che mostra i gap percettivi in relazione alla spaziatura della superficie per il soggetto 9, si può affermare che il gap percettivo corrispondente alla
superficie a cui avviene il riconoscimento è pari a 0.191 circa, dato che per un valore pari a 0.072 circa di gap percettivo il soggetto non è stato comunque in grado di riconoscere la superficie. Si può affermare che in questo caso il valore soglia di gap percettivo che permette il riconoscimento è compreso tra 0.072 e 0.191.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 44.0 48.5 50.9 54.2 46.7 51.1 Tabella 4.18
La velocità media di esplorazione in questo caso è pari a 49,2 mm/sec. Osservando la tabella 4.20 si può notare come il valore della velocità non vari in modo molto lineare rispetto al valore della spaziatura, il coefficiente di correlazione infatti non è molto alto pari a 0.49. Il valore del coefficiente di correlazione tra il RMS e la velocità risulta uguale a quello tra spaziatura e velocità, quindi una correlazione non molto alta.
4.2.10 Soggetto 10
Il soggetto 10 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento dello 0% circa, riesce a discriminare la superficie con spaziatura di 2.6 mm con una percentuale di riconoscimento del 71% e le altre superfici vengono riconosciute con percentuale del 100%.
Figura 4.14: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 10. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Osservando solo il grafico in figura 4.14 degli RMS medi relativo al soggetto 10, si può affermare, come per il soggetto 9, che non è molto chiaro quando avviene il riconoscimento. Certamente il valore di RMS relativo alla superficie con spaziatura di 2.1 mm ha un valore minore rispetto a quella con spaziatura di 2.6 mm, la differenza nel valore tra queste due superfici non è così evidente, come in altri casi, da poter indicare che nel passaggio tra queste due superfici avvenga il riconoscimento.
Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0727 0.1698 0.3251 0.6033 0.7651 Tabella 4.19
Per il soggetto 10 alla superficie non riconosciuta viene associato un gap percettivo di 0.073 (tabella 4.19), per la prima superficie discriminata il gap associato è di 0.169 circa, il gap soglia deve trovarsi tra questi due valori.
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 19.7 37.5 17.0 22.5 23.9 28.6 Tabella 4.20
La velocità media di esplorazione in questo caso è pari a 24,9 mm/sec. Osservando la tabella 4.20 si può notare come il valore della velocità non segua l’andamento della spaziatura; infatti il coefficiente di correlazione risulta pari a 0.07. Il valore del coefficiente di correlazione tra il RMS e la velocità risulta pari a 0.10, una correlazione molto bassa.
4.2.11 Soggetto 11
Il soggetto 11 non è in grado di riconoscere la differenza tra la superficie di riferimento e la superficie con spaziatura di 2.1 mm con una percentuale di riconoscimento del 14%, riesce a discriminare la superficie con spaziatura di 2.6 mm e quella con spaziatura 3.1 mm con una percentuale dello 86%. Quelle con spaziatura maggiore sono discriminate con una percentuale di riconoscimento del 100%.
Figura 4.15: valore medio del RMS normalizzato della forza tangenziale al variare della spaziatura delle superfici per il soggetto 11. La “r” sta ad indicare il valore per la superficie di riferimento, la linea tratteggiata sta ad indicare da dove avviene il riconoscimento. Sopra
il grafico viene indicato il valore di RMS medio fra tutte le superfici usato per la normalizzazione
Come si può vedere dal grafico in figura 4.15 relativo al soggetto 11 i valori relativi alla superficie di riferimento e quelli riferibili alla superficie con spaziatura immediatamente successiva sono simili tra loro, il valore relativo alla superficie con spaziatura pari a 2.6 mm risulta essere un valore più alto tale da poter permettere di distinguere tra il riferimento e la superficie da valutare, però dal grafico questo non risulta così evidente come in alcuni casi precedenti. Spaziatura [mm] 2.1 2.6 3.1 3.6 4.1 Discriminazione No Si Si Si Si Gap percettivo 0.0416 0.1266 0.2365 0.4030 0.6243 Tabella 4.21
In questo caso osservando la tabella si può affermare che il gap percettivo soglia deve trovarsi tra un valore di 0.042 e un valore di 0.127 (tabella 4.21).
Spaziatura [mm] 1.6 2.1 2.6 3.1 3.6 4.1 Velocità media [mm/sec] 51.5 58.7 61.9 73.2 64.0 74.0 Tabella 4.22
La velocità media di esplorazione in questo caso è pari a 63,9 mm/sec. Osservando la tabella 4.22 si può notare come all’aumentare della spaziatura il valore della velocità tende ad aumentare il valore della velocità media, eccetto nel caso della superficie con spaziatura pari a 3.6 mm, il coefficiente infatti risulta pari a 0.86, un valore alto. Il valore del coefficiente di correlazione tra il RMS e la velocità risulta pari a 0.79, quindi un valore abbastanza alto di correlazione anche in questo caso.
4.3 Sintesi dei risultati
Dall’analisi sulla correlazione tra la spaziatura delle superfici e la velocità media con cui sono esplorate, si può notare che in tutti i casi c’è una correlazione di tipo positivo, quindi la velocità dovrebbe aumentare con l’aumentare della spaziatura, questo però non può essere sempre detto; infatti mentre in alcuni casi il valore di correlazione è molto alto (soggetti 2, 4, 6, 11), in altri il valore è molto basso (soggetti 1, 3, 5 ,7, 10); non si può dire quindi che è sempre presente una correlazione tra la spaziatura della superficie analizzata e la velocità di esplorazione.
Per quanto riguarda la correlazione tra la velocità e il valore medio normalizzato di RMS della forza tangenziale si può affermare che i valori ottenuti sono simili a quelli riferiti alla correlazione tra spaziatura e velocità; questo a conferma indiretta del fatto che RMS e spaziatura hanno andamenti simili. Il fatto di non poter sempre dire che all’aumento della velocità corrisponda un aumento del valore di RMS e quindi un aumento della percezione conferma le tesi di vari studi[19][22], che affermano che il parametro della velocità ha una bassa influenza sulla percezione. Interessante comunque è il fatto che, valutando il valore medio calcolato su tutte le superfici, al variare dei soggetti, della velocità di esplorazione e del RMS non normalizzato, si scopre una correlazione abbastanza alta tra questi valori,
pari a 0.78; quindi il valore medio assoluto di RMS calcolato fra tutte le prove è influenzato dalla velocità media con cui il soggetto svolge l’esplorazione.
Considerando quanto detto nei paragrafi precedenti in relazione ai grafici e al gap percettivo valutato soggetto per soggetto si osserva che mentre in alcuni casi è evidente il salto nel valore medio di RMS nel passare dalla superficie non riconosciuta a quella discriminata, in altri casi osservando solo la figura non è così facile discriminare tra queste due superfici, l’importante comunque è che l’andamento dei grafici sia per lo più crescente con l’aumentare del valore di spaziatura della superficie dato che questo è un importante parametro influente nella valutazione della rugosità e che la percezione della rugosità aumenta all’aumentare della spaziatura degli elementi in rilievo sulla superficie. Nei casi in cui il valore di RMS medio della superficie di riferimento risulta maggiore rispetto alla superficie con valore di spaziatura subito superiore (soggetto 2 e 3) la differenza di questo valore tra le due superfici è molto piccola e i soggetti valutano inoltre le due superfici uguali tra loro.
Osservando i valori relativi al gap percettivo si può più intuitivamente valutare quando avviene la discriminazione nel soggetto, confrontando infatti i valori delle differenze tra RMS medio della superficie di riferimento e superfici da discriminare può essere sempre trovato un range di valori, all’interno del quale si può individuare il gap percettivo di soglia e in particolare si può individuare un range di valori in comune nei vari soggetti, che va da 0.08 a 0.11 circa, questo fatto è importante perché è una dimostrazione che esiste un range di valori di soglia comune, superato il quale tutti i soggetti discriminano le superfici.
4.4 Fitting dei risultati
I risultati ottenuti da tutti i soggetti sono stati visualizzati in un grafico dove in ordinata si ha la percentuale di risposte corrette e in ascissa i valori di gap percettivo. E’ stato svolto successivamente un fitting per trovare la minima funzione che descrive l’andamento di questi dati. Le funzioni utilizzate che sembravano poter meglio descrivere i dati sono due: la funzione esponenziale ) * ( 1 e X esp= − −α
con X pari ai valori del gap percettivo, e la funzione della sigmoide
[ ] ) 1 /( 1 e *(X d) sig = + α −
sempre con X pari ai valori del gap percettivo. Il valore che veniva minimizzato dai programmi è la media degli errori.
In figura 4.16 e figura 4.17 vengono mostrati i dati ottenuti e la relativa funzione che minimizza gli errori rispettivamente per la funzione esponenziale e quella della sigmoide.
Figura 4.16: grafico relativo alla frazione di risposte corrette rispetto al gap percettivo con sovrapposizione della curva di tipo esponenziale che minimizza l’errore, le linee
tratteggiate rappresentano l’errore medio del fitting.
Il guadagno “alfa” della funzione esponenziale risulta essere pari a circa 9.669, per questo valore di guadagno il valore di gap percettivo per cui si ha una frazione di risposte giuste pari a 0.5 è 0.072 circa. Tale valore risulta più piccolo rispetto al valore inferiore del range di valori in cui si era ipotizzato, dai dati presi dai singoli soggetti (paragrafo 4.3), potesse trovarsi il valore soglia che permettesse il riconoscimento. Il valore della media dell’errore risulta essere pari a 0.081.
Figura 4.17: grafico relativo alla frazione di risposte corrette rispetto al gap percettivo con sovrapposizione della curva sigmoide che minimizza l’errore, le linee tratteggiate
rappresentano l’errore medio del fitting.
Il guadagno “alfa” dell’esponenziale presente nella funzione della sigmoide che minimizza l’errore medio risulta essere pari a circa 42.42, mentre la soglia, che in questo caso coincide con l’altro parametro “d” da trovare per minimizzare la funzione, è pari a 0.109. Tale valore risulta compreso nel range precedentemente ipotizzato. Il valore medio di errore, che in questo caso è pari a 0.058, risulta più basso rispetto al valore trovato per il fitting precedente. In generare questo tipo di funzione sembra meglio descrivere il tipo di comportamento che hanno questi dati. Tale curva, per il suo andamento, può avvalorare l’ipotesi che il soggetto fino a un certo valore di gap percettivo non sia in grado di riuscire a valutare la differenza tra superfici e considerare le superfici tra loro simili superato questo valore per i soggetti risulta più facile discriminare il fatto che le due superfici esplorate in successione siano diverse.