Appendice B C
ENNI SUL PRINCIPIO DI FUNZIONAMENTO DELLA RISONANZA MAGNETICACome preventivamente discusso in §.4 un importante requisito progettuale delle bobine RF in trasmissione per applicazioni di risonanza magnetica (RM), è quello di garantire una distribuzione omogenea dell’induzione magnetica a RF. Inoltre tali bobine devono avere un comportamento risonante alla frequenza di funzionamento dell’apparato RM. Per comprendere più chiaramente l’ambito operativo, è doveroso un approfondimento del principio fisico che sta alla base della RM.
B.1 Interazione del campo magnetico con i tessuti biologici
L’interazione fra la materia e il campo magnetico, si manifesta tramite un’azione diretta del campo sui dipoli magnetici eventualmente presenti a livello microscopico sui quali possa essere esercitata una forza o, più precisamente, una coppia di forze.
Facendo riferimento al modello dell’atomo, vale la proprietà secondo la quale gli atomi aventi un peso atomico e/o un numero atomico10 dispari, (come ad esempio l’atomo di idrogeno) sono dotati di un movimento di rotazione angolare attorno al proprio asse, ovvero presentano un momento angolare Ja detto spin.
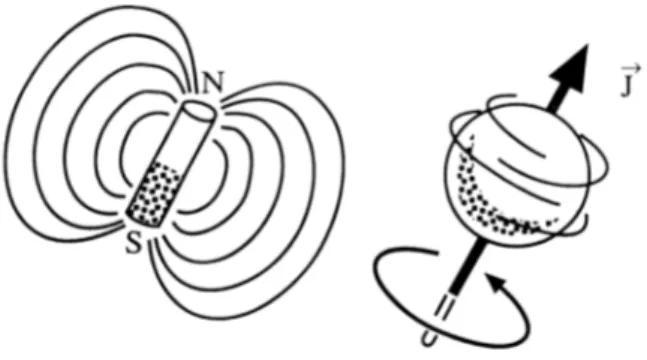
Poiché la rotazione dei nuclei determina l’insorgenza di cariche elettriche in movimento (i protoni), si assiste alla generazione di campi magnetici: sotto questo punto di vista il nucleo può essere considerato come un dipolo con un momento magnetico µ, e quindi è assimilabile ad un piccolo magnete come mostrato nella Figura B-35.
Sussiste la seguente relazione fra il momento magnetico ed il momento angolare:
a
J ,
µ γ= B.16 essendo γ il rapporto giromagnetico, grandezza tipica del nucleo considerato, che nel caso dell’atomo di idrogeno vale 267.5MHz/T.
Figura B-35 – Momento magnetico associato ad un nucleo con momento angolare
Il comportamento complessivo di un sistema di atomi, dal punto di vista magnetico, è descritto dal vettore di magnetizzazione M, definito dalla somma dei momenti magnetici elementari associati ai singoli nuclei:
i
M =
∑
µ . B.17 La magnetizzazione è legata al vettore induzione magnetica11B dalla relazione:0
B=µ H M ,+ B.18 (µ0=4π10-7H/m) ed esprimendo questa in termini della suscettività magnetica χm si ha
0 m
M =µ χ H , B.19 dalla quale si ottiene:
(
)
0 m 0 r
B=µ 1+χ H =µ µ H , B.20 essendo µr la permeabilità magnetica relativa.
La presenza di una permeabilità magnetica relativa diversa dall’unità, indica dunque una magnetizzazione non nulla; in pratica la magnetizzazione possiede valori ragguardevoli soltanto nei materiali ferromagnetici.
Il corpo umano contiene diverse tipologie di atomi i cui nuclei possiedono momento angolare, ma i materiali biologici, non presentano però proprietà ferromagnetiche e di conseguenza la loro permeabilità magnetica è unitaria (µr=1); infatti all’interno dei tessuti biologici, per effetto della casualità del moto dovuto all’agitazione termica, i nuclei degli atomi che lo compongono sono orientati casualmente, dando luogo ad una magnetizzazione totale nulla (M=0).
11 L’unità di misura comunemente utilizzata per l’induzione magnetica in ambito RM è il Tesla
Naturalmente, un campo magnetico tempo-variante può agire sui tessuti biologici in maniera indiretta, inducendo nel tessuto una forza elettromotrice (f.e.m.) la cui origine è descritta dalla legge di Faraday-Neuman, dunque attribuita alla variazione del flusso dell’induzione magnetica concatenato; tale f.e.m. indotta genera una corrente che può essere anche intensa se il tessuto è conduttore.
In questo senso, il campo magnetico (tempo-variante) può interagire con i sistemi biologici, ma si tratta appunto di un’interazione indiretta, causata dall’azione sulle cariche della f.e.m. indotta. In questa maniera non sono coinvolte le proprietà magnetiche del materiale, potendo in definitiva concludere che, per quel che riguarda le proprietà magnetiche in senso stretto, i materiali biologici non differiscono sostanzialmente dallo spazio vuoto.
L’applicazione di un campo magnetico statico, ad un tessuto biologico determina un comportamento che sta alla base dei principi della risonanza magnetica (RM).
Con l’applicazione di un’induzione magnetica statica B0 ad un sistema di atomi,
(convenzionalmente orientata secondo la direzione longitudinale indicata dall’asse z), un eccesso di nuclei si allinea parallelamente alla direzione del campo e crea una magnetizzazione netta M0 diretta secondo la direzione del campo statico B0.
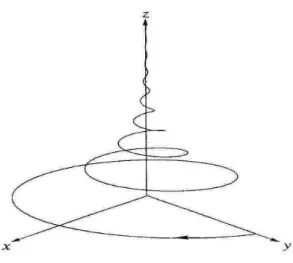
Considerando infatti l’effetto della applicazione di B0 sul singolo nucleo, questo porta alla
insorgenza di una coppia µ×B0 che origina un moto di precessione del momento magnetico µ
rispetto alla direzione di B0, come mostrato nella Figura B-36.
La Relazione di Larmor stabilisce un legame di proporzionalità fra la velocità angolare di precessione ω0 (frequenza di Larmor) del singolo nucleo (avente verso di rotazione orario per
un osservatore disposto secondo la direzione del campo statico) e l’intensità dell’induzione stessa:
0 B .0
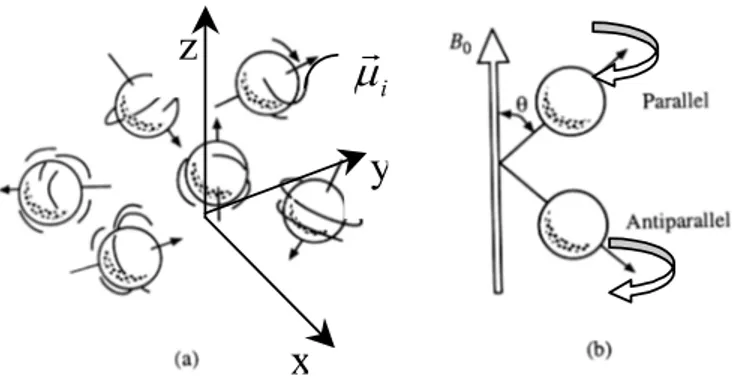
ω =γ B.21 Considerando invece la situazione dal punto di vista macroscopico, nonostante che i singoli momenti magnetici µi possano orientarsi in modo da avere la componente secondo z con verso parallelo o antiparallelo secondo la direzione del campo principale, si ottiene comunque una magnetizzazione risultante non nulla, la cui espressione è la seguente:
x y z
xˆ yˆ zˆ iˆ i ˆ iˆ
0
ˆB
Figura B-36 – Precessione attorno all’induzione statica
essendo µix, µiy , µiz le componenti della magnetizzazione elementare µi sui tre assi principali. Poiché la proiezione del vettore µi sul piano trasverso è casuale, (essendo casuale il suo angolo di sfasamento iniziale rispetto all’asse x di riferimento), le componenti Mx ed My sono
satisticamente nulle. La Figura B-37 mostra tale aspetto.
i
µ
G
z
y
x
Figura B-37 – Annullamento delle componenti trasverse
Considerando di nuovo l’equazione di Larmor, si osserva come la frequenza di Larmor rappresenti la frequenza di risonanza naturale del sistema di nuclei. Questo concetto sta alla base del principio fisico descritto dalla risonanza magnetica, secondo il quale è possibile indagare la natura dei tessuti. Infatti la dipendenza lineare della frequenza di risonanza ω0 sia
dalla intensità dell’induzione statica che dal rapporto giromagnetico, consente di avere informazioni da una specifica tipologia di atomi senza “disturbare” atomi di altro tipo.
Nel corpo umano, i nuclei dotati di momento angolare sono il fosforo31, il potassio39, l’azoto14, il sodio23, il fluoro19, il carbonio13 e l’idrogeno. Tutti questi nuclei sono
potenzialmente adatti allo studio con risonanza magnetica; tuttavia l’idrogeno è quello che meglio si presta, in quanto fortemente più abbondante, sia sottoforma di acqua, che legato chimicamente a formare proteine, grassi, zuccheri, ecc. Per queste caratteristiche il nucleo di idrogeno, costituisce l’elemento base dell’immagine RM.
Nella realtà, un sistema protonico possiederà un insieme di frequenze di risonanza, più precisamente esisteranno dei gruppi di nuclei ciascuno dei quali sarà caratterizzato da una specifica frequenza di risonanza, ma i vari gruppi origineranno un insieme di distinte frequenze risonanti.
Esistono due motivi che causano questo fenomeno: • la disomogeneità dell’intensità B0,
• l’effetto del “chemical shift”.
Dalla relazione di Larmor, è evidente che una disomogeneità spaziale dell’induzione statica implica differenti frequenze di Larmor per i nuclei che hanno il solito rapporto giromagnetico. L’effetto del chemical shift è invece dovuto al fatto che i nuclei dell’atomo di idrogeno fanno parte di molecole di diversa tipologia, costituenti l’oggetto eterogeneo da analizzare. Infatti, poiché i nuclei delle molecole in questione, sono circondati da elettroni orbitanti i quali sono in grado di generare un debole campo magnetico, questo porta ad una variazione dell’induzione statica in corrispondenza del nucleo di idrogeno stesso e quindi tale variazione è funzione della natura della molecola di cui l’atomo fa parte.
In conclusione, poiché il campo magnetico effettivo in corrispondenza del nucleo di idrogeno è esprimibile in termini del disturbo δ dovuto alla molecola, ˆB0 =B0(1-δ) lo shift della frequenza di Larmor in corrispondenza di un’induzione omogenea è quantificabile dalla relazione ωˆ0 =ω0(1-δ).
Concludendo, mentre la dipendenza dello shift frequenziale dalla costante di schermatura δ dovuta alla molecola, rappresenta la caratteristica utile in grado di garantire una accurata risoluzione nell’acquisizione dei dati (spettroscopia NMR), l’effetto della disomogeneità dell’induzione statica comporta inevitabili errori di distorsione nella ricostruzione dell’immagine diagnostica.
B.2 Applicazione di un campo magnetico RF al sistema di nuclei magnetizzato
Un sistema di nuclei magnetizzato attraverso un campo magnetico statico B0, può ricevere
energia dall’esterno tramite l’applicazione di un campo magnetico a radio frequenza oscillante B1(t). L’induzione magnetica RF consente di operare nella condizione di risonanza se è
polarizzata circolarmente nel piano ortogonale alla direzione dell’induzione statica e se ruota con verso concorde a quello di rotazione dei nuclei attorno alla direzione dell’induzione statica (orario per un osservatore disposto secondo la direzione di B0), con una velocità
angolare ωRF di valore pari alla frequenza di Larmor del sistema di nuclei (ωRF= ω0).
Il campo magnetico a radio frequenza, viene applicato attraverso un impulso la cui durata può andare da alcuni millisecondi ad alcuni microsecondi, e l’inviluppo di tale impulso ha un’ampiezza molto ridotta rispetto all’induzione statica (valori tipici dell’ampiezza dell’impulso RF sono dell’ordine di 50mT, mentre per il campo statico sono comuni valori di 1.5T). La relazione
e
1 1 RF ˆ
B ( t ) 2B ( t )cos(= ω t+ϕ)x, B.23 che rappresenta un impulso RF con inviluppo B1e(t), pulsazione ωRF e fase iniziale φ
polarizzato linearmente secondo l’asse x, può essere interpretata come la composizione di due campi polarizzati circolarmente e ruotanti nel verso opposto sul piano x-y:
[
]
[
]
e e
1 1 RF ˆ RF ˆ 1 RF ˆ RF ˆ
B ( t ) B ( t ) cos(= ω t+ϕ)x sin(− ω t+ϕ)y +B ( t ) cos(ω t+ϕ)x sin(+ ω t+ϕ)y . B.24 Scegliendo come verso di riferimento quello positivo per l’asse z, si ha che il primo termine del secondo membro è caratterizzato da una componente con rotazione oraria e quindi concorde col verso della precessione dei nuclei, mentre il secondo è relativo ad una polarizzazione circolare antioraria. Poiché quest’ultima componente ruota nella direzione opposta della precessione dei nuclei essa non da origine ad alcun effetto utile e quindi rappresenta energia perduta.
Quindi il campo RF deve avere la seguente forma analitica:
[
]
e
1 1 RF ˆ RF ˆ 1,xˆ 1,yˆ
B ( t ) B ( t ) cos(= ω t+ϕ)x sin(− ω t+ϕ)y =B x B+ y. B.25 L’induzione magnetica RF viene generata da apposite bobine RF di volume. I moderni sistemi NMR utilizzano delle bobine di trasmissione del campo RF in quadratura, in modo da
generare un’induzione RF polarizzata circolarmente evitando così la trasmissione di potenza inutile. Una bobina con configurazione cilindrica e con specifiche proprietà di simmetria, ben si presta ad operare in condizioni di polarizzazione circolare quando alimentata in particolari posizioni.
I parametri che hanno rilevanza circa l’impulso RF sono la frequenza e la forma dell’inviluppo, mentre la fase iniziale non ha alcun effetto significativo. La frequenza è un valore costante, ed è imposto dalla condizione di risonanza, mentre l’inviluppo assume un ruolo fondamentale, in quanto la sua durata temporale e la sua forma individuano la proprietà dell’eccitazione. Gli impulsi RF sono infatti nominati in base alla forma dell’inviluppo; si citano ad esempio l’impulso rettangolare e quello di tipo sinc:
1 p p e 1 1 p B se 0 t t / 2 B ( t ) B rect( ) , 0 altrimenti τ τ τ ⎧ ≤ ≤ − ⎪ = = ⎨ ⎪⎩ B.26
(
)
(
)
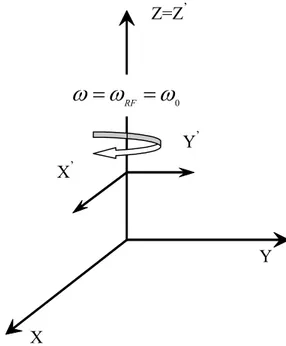
p 1 p p e 1 1 p p t / 2 B sinc f t / 2 se 0 t B ( t ) B rect( )sinc f t / 2 . 0 altrimenti ϖ ϖ τ π τ τ π τ τ ⎧ ⎡ ⎤ − ⎡ ⎤ ⎪ ⎣ − ⎦ ≤ ≤ = ⎣ − = ⎨ ⎦ ⎪⎩ B.27 Ai fini della comprensione del meccanismo di funzionamento della risonanza magnetica, oltre al sistema di riferimento assoluto XYZ considerato, è opportuno fare riferimento anche ad un sistema di riferimento X’Y’Z’ rotante alla frequenza di Larmor ω=ωRF=ω0 e con l’asse Z’coincidente con l’asse Z del sistema assoluto (Figura B-38).
In tal caso la trasformazione di coordinate che consente di passare dal sistema di riferimento fisso a quello rotante è la seguente:
' 0 0 ' 0 0 ' ˆ ˆ ˆ
x cos( t )x sin( t )y,
ˆ ˆ ˆ
y sin( t )x cos( t )y, ˆ ˆ z z. ω ω ω ω = − = + = B.28
Y’ X’ Z=Z’ Y X 0
ω
ω
ω
=
RF=
Figura B-38 – Sistema di riferimento rotante in condizioni di risonanza
Sotto questa ipotesi vale la seguente regola di trasformazione per il vettore di magnetizzazione: ' ' ' x 0 0 x 0 0 y y z z M cos t sin t 0 M M sin t cos t 0 M , 0 0 1 M M ω ω ω ω ⎡ ⎤ − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⋅ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ B.29
essendo Mrot=Mx’ˆx+My’ˆy +Mz’ˆz l’espressione della magnetizzazione nel sistema di
riferimento rotante.
Mentre la (B.15) consente la rappresentazione dell’induzione magnetica RF nel piano rotante:
' ' ' ' 1,rot 1,x ˆ 1,y ˆ B =B x +B y , B.30 con ' ' 1,x 0 0 1,x 1,y 0 0 1,y B cos t sin t B . B B sin t cos t ω ω ω ω ⎡ ⎤ ⎡ − ⎤ ⎡ ⎤ ⎢ ⎥ =⎢ ⎥⋅ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ B.31
B.2.1 Equazione di Bloch
Il comportamento temporale del vettore di magnetizzazione M in presenza del campo a RF è espresso dall’equazione di Bloch:
(
0)
z z x y 2 1 ˆ M M z ˆ ˆ M x M y dM M B , dt γ T T − + = × − − B.32essendo M0z il valore della magnetizzazione all’equilibrio, ovvero nel caso in cui sia applicato unicamente B0, mentre T1 e T2 sono due costanti temporali che caratterizzano il processo di rilassamento della magnetizzazione seguante alla perturbazione del sistema di nuclei per effetto del campo RF.
Al fine di comprendere l’effetto dell’applicazione del campo RF, possiamo inizialmente considerare la durata τp dell’impulso RF molto minore di questi due intervalli temporali, ciò che in realtà accade nella pratica, cosicché gli ultimi due termini a secondo membro possono non essere considerati:
0 1
dM
M B , B B B .
dt =γ × = + B.33 Riconducendo questa relazione al sistema di riferimento rotante, si ottiene:
rot effettivo M M B , t γ ∂ = × ∂ B.34 essendo 0 effettivo rot ˆz B B ω γ = − B.35 un campo totale fittizio riferito al sistema di riferimento rotante finalizzato alla descrizione dell’effetto sulla magnetizzazione e Brot=B0+B1,rot.
La presenza della derivata parziale è dovuta al fatto che anche i versori ˆx , ' ˆy e ' ˆz variano ' nel tempo.
Per comprendere il significato dell’induzione fittizia Beffettivo si consideri la sola la presenza dell’induzione statica: in tal caso essendo ω0=γB0 si ha Beffettivo B z0ˆ γ B z0ˆ 0
γ ⋅ = − = ovvero rot M 0 t ∂ =
∂ espressione dalla quale si deduce la stazionarietà della magnetizzazione nel sistema di riferimento rotante quando non è presente l’induzione magnetica RF B1(t).
L’espressione dell’equazione di Bloch nel sistema di riferimento rotante risulta essere la seguente:
(
)
' ' ' ' ' 0z ' x y z rot rot effettivo 2 1 ˆ ˆ ˆ M x M y M M z M M B . t γ T T + − ∂ = × − − ∂ B.36B.2.2 Applicazione della sollecitazione nella condizione di risonanza
L’obiettivo è quello di definire l’andamento temporale del vettore di magnetizzazione quando al sistema di nuclei sia applicato di un campo RF operante nella condizione di risonanza, ovvero con una velocità angolare ωRF di valore pari alla frequenza di Larmor ωRF=ω0.
Considerando quindi una induzione RF con polarizzazione destrogira
[
]
e
1 1 RF ˆ RF ˆ 1,xˆ 1,yˆ
B ( t ) B ( t ) cos(= ω t+ϕ)x sin(− ω t+ϕ)y =B x B+ y, in base alla (B.16) l’espressione nel sistema di riferimento rotante diviene:
' ' 1,x e 0 0 RF e 1 1 0 0 RF 1,y
B cos t sin t cos( t ) 1
B ( t ) B ( t ) ,
B sin t cos t sin( t ) 0
ω ω ω ϕ ω ω ω ϕ ⎡ ⎤ ⎡ − ⎤ ⎡ + ⎤ ⎡ ⎤ ⎢ ⎥ = ⋅⎢ ⎥ ⎢⋅ ⎥= ⋅⎢ ⎥ − + ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ B.37 ovvero e ' 1,rot 1 ˆ B =B ( t )x , B.38 per ottenere la quale è stata considerata la relazione ωRF=ω0 ed il fatto che la fase iniziale φ
non contenendo alcuna informazione utile è stata posta pari a zero. Conseguentemente, essendo ω0=γB0, si ha:
' e ' 0 0 e ' e ' effettivo 0ˆ 1 ˆ ˆz 0 ˆ 1 ˆ 1 ˆ B B z B ( t )x ω B ω z B ( t )x B ( t )x . γ γ ⎛ ⎞ = + − =⎜ − ⎟ + = ⎝ ⎠ B.39
Sostituendo questa relazione nella (B.19), si ottiene:
e ' rot rot 1 M ˆ M B ( t )x , t γ ∂ = × ∂ B.40 la cui soluzione è la seguente:
( )
( )
( )
( )
( )
' ' ' x t 0 e z 1 p y 0 t 0 e z 1 p z 0 M t 0 M t M sin B d 0 t . M t M cos B d 0 t γ τ τ τ γ τ τ τ ⎧ ⎪ ⎪ = ⎪ ⎪ ⎛ ⎞ ⎪ = ⋅ ⎜ ⎟ ≤ ≤ ⎨ ⎜ ⎟ ⎪ ⎝ ⎠ ⎪ ⎛ ⎞ ⎪ ⎜ ⎟ = ⋅ ≤ ≤ ⎪ ⎜ ⎟ ⎪ ⎝ ⎠ ⎩∫
∫
B.41Per ottenere la (B.39) sono state considerate le condizioni iniziali Mx’(0)=0, My’(0)=0,
Mz’(0)= M0z. L’osservazione della (B.26) consente di concludere che l’applicazione del campo
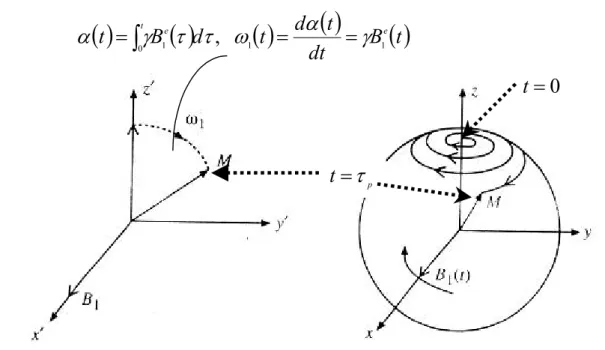
RF alla frequenza di Larmor impone, nel sistema di riferimento rotante, un meccanismo di precessione del vettore di magnetizzazione attorno all’asse x’ con velocità angolare dipendente dalla durata e dalla forma dell’inviluppo del segnale RF:
( )
t e( )
( )
( )
e( )
1 1 1 0 d t t B d , t B t . dt α α =∫
γ τ τ ω = =γ B.42 Se ad esempio 1e 1 p p t / 2 B ( t ) B rect( τ ) τ − = si ha:( )
( )
( )
( )
( )
' ' ' x 0 z 1 p 1 1 y 0 z 1 p 1 1 z M t 0 M t M sin t 0 t , B M t M cos t 0 t , B ω τ ω γ ω τ ω γ ⎧ = ⎪ ⎪ = ⋅ ≤ ≤ = ⎨ ⎪ ⎪ = ⋅ ≤ ≤ = ⎩ B.43dunque la precessione attorno all’asse x’ avviene con velocità angolare costante ω
1=γB1, come descritto dalla Figura B-39, quando si osservi che essendo nella pratica B1<<B0 si ha ω0(=γB0)<<ω1(=γB1).
Come evidente, il vettore magnetizzazione M subisce uno scostamento angolare dall’asse z ed il massimo spostamento viene raggiunto al termine dell’impulso RF:
( )
p( )
p MAX e 1 t 0 t τ τ B d . α =α = =∫
γ τ τ B.44 Nel caso dell’impulso rettangolare, α=γB1τp e se ad esempio τp=0.1ms, B1=0.6G=6·10-5T otteniamo αMAX=π/2.p
t
=
τ
( )
( )
( )
( )
B
( )
t
dt
t
d
t
d
B
t
t e e 1 1 0 1,
γ
α
ω
τ
τ
γ
α
=
∫
=
=
0
=
t
Figura B-39 – Andamento temporale della magnetizzazione durante la fase di eccitazione
L’angolo αMAX dipende dunque dalla durata e dalla forma dell’inviluppo del segnale RF, ma è importante osservare che mentre l’andamento temporale di Be1(t) determina la traiettoria della magnetizzazione, è possibile avere diverse tipologie di impulsi che impongono il solito valore αMAX quando, a parità di durata τp, abbiano un inviluppo che sottende la solita area.
Il meccanismo che descrive l’andamento temporale della magnetizzazione durante la fase di eccitazione dell’impulso RF, è stato descritto trascurando i termini contenenti T1 e T2 nella (B.21). Questi sono invece indispensabili per descrivere il processo di rilassamento subito da M negli istanti successivi al termine della perturbazione di durata τp. In questa seconda fase le componenti sul piano trasverso tendono ad annullarsi a partire dai valori assunti al termine della eccitazione RF (Mx(τp), Mx(τp)) e viene recuperata la componente longitudinale M0 dovuta all’induzione statica a patite dal valore Mz(τp).
Con 0+ è indicato l’istante immediatamente successivo al termine dell’impulso RF. In particolare l’andamento del rilassamento trasversale e longitudinale è descritto nel sistema di riferimento rotante dalle due equazioni:
(
')
' z 0z ' z 1 ˆ M M z dM , dt T − = − B.45' ' ' ' ' ' x y x y 2 ˆ ˆ dM M x M y , dt T + = − B.46 direttamente ottenute dalla relazione (B.21) nella quale il primo termine del secondo membro è nullo in quanto, dopo l’istante 0+ è presente solamente l’induzione statica:
' 0 rot effettivo rot 0 ˆ
M B M B ω z 0. γ γ γ ⎛ ⎞ × = ×⎜ − ⎟= ⎝ ⎠ B.47 La soluzione delle due equazioni differenziali è descritta dalle relazioni temporali:
( )
( )
(
( )
( )
)
2 ' ' ' ' t T ' ' ' ' x ˆ y ˆ x ˆ y ˆ M t x M t y M 0 x M 0 y e , − + + + = + B.48( )
( )
1( )
1 ' ' ' t t T T ' ' ' z ˆ z ˆ z ˆ M t z M 0 1 e z M 0 e z , − − + ⎛ ⎞ ⎜ ⎟ = ⎜ − ⎟ + ⎜ ⎟ ⎝ ⎠ B.49essendo Mx’(0+), My’(0+), Mz’(0+) riferiti all’istante in cui termina l’impulso RF e Mz’(0)= Mz(0) la magnetizzazione presente quando è presente solamente l’induzione statica.
Si osserva quindi che il decadimento della magnetizzazione trasversa Mx’(t)ˆx + M' y’(t)ˆy ed il ' rilassamento di quella longitudinale, avvengono secondo un andamento esponenziale decrescente successivamente all’applicazione della perturbazione RF.
Le costanti di tempo T1 e T2 indicano i tempi necessari per una riduzione del 37% della componente trasversa e del 63% di quella longitudinale:
( )
( )
(
( )
( )
)
( )
( )
' ' ' ' ' ' ' ' 0 ' ' 2 2 0 x y x y ' 0 ' 1 0 z z ˆ ˆ ˆ ˆ M T x M T y 37 M 0 x M 0 y , ˆ ˆ M T z 63 M 0 z . + + + + = + = B.50Si osservi inoltre che la costante di tempo T1 è dell’ordine di una decina di volte la costante T2.
La rappresentazione degli andamenti temporali della magnetizzazione trasversa nel sistema di riferimento principale è invece la seguente:
( )
( )
( )
( )
( )
( )
' ' 2 ' ' t x x x 0 0 0 0 T y 0 0 y 0 0 y M 0 M tM t cos t sin t cos t sin t
e , M t sin t cos t M t sin t cos t M 0
ω ω ω ω ω ω ω ω + − + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡= ⎤⋅⎢ ⎥=⎡ ⎤ ⎢⋅ ⎥⋅ ⎢ ⎥ ⎢− ⎥ ⎢ ⎥ ⎢− ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ B.51 ovvero
( )
( )
( )
( )
( )
( )
2 ' ' 2 ' ' t T x x 0 y 0 t T y x 0 y 0 M t M 0 cos t M 0 sin t e M t M 0 sin t M 0 cos t e . ω ω ω ω − + + − + + ⎡ ⎤ =⎢ + ⎥⋅ ⎣ ⎦ ⎡ ⎤ = −⎢ + ⎥⋅ ⎣ ⎦ B.52I valori iniziali da utilizzare nella (B.37) sono deducibili applicando la (B.14) a partire dai valori assunti dalla magnetizzazione trasversa al termine dell’istante τp durata della sollecitazione RF:
( )
( )
( )
( )
( )
( )
( )
( )
' ' x x 0 p y 0 p 0 p 0 p x 0 p 0 p y x 0 p y 0 p yM 0 cos sin M 0 M 0 cos M 0 sin
. sin cos M 0 M 0 M 0 sin M 0 cos ω τ ω τ ω τ ω τ ω τ ω τ ω τ ω τ + + + + + + + + ⎡ ⎤ ⎡ − ⎤ ⎡ ⎤ ⎡ − ⎤ ⎢ ⎥= ⋅⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ + ⎣ ⎦ ⎢ ⎥ ⎢⎣ ⎥ ⎢⎦ ⎣ ⎥⎦ ⎣ ⎦ B.53 Per quella longitudinale si ha invece:
( )
( )
1( )
1 t t T T z ˆ z ˆ z ˆ M t z M 0 1 e z M 0 e z. − − + ⎛ ⎞ ⎜ ⎟ = ⎜ − ⎟ + ⎜ ⎟ ⎝ ⎠ B.54Le equazioni (B.37) ed (B.39) descrivono il processo di rilassamento subito rispettivamente dalla componente trasversa e longitudinae della magnetizzazione per effetto dell’applicazione dell’induzione RF.
In particolare, la magnetizzazione trasversa tende ad annullarsi tramite decadimento esponenziale con costante di tempo T2 mantenendo contemporaneamente una precessione rispetto alla direzione dell’induzione statica.
La durata della costante di tempo T2 nei tessuti biologici, è dell’ordine della decina di ms, ed è in questo intervallo temporale che avviene la rivelazione del segnale RM.
In conclusione il vettore M(t) tende al valore statico M0 dovuto alla induzione statica, come descritto nella Figura B-40. Valutando l’effetto della perturbazione dovuta all’impulso RF ed in particolare i tempi necessari per ripristinare lo stato iniziale, è possibile ricostruire le immagini diagnostiche.
Figura B-40 – Meccanismo di rilassamento della magnetizzazione
Le immagini che si ottengono sono essenzialmente delle mappe rappresentative della distribuzione di densità dei nuclei di idrogeno e dei parametri che riflettono il loro movimento nei liquidi cellulari e nei grassi.
B.2.3 Applicazione dei gradienti di campo magnetico
Nella fase di rivelazione della risposta del campione conseguente all’applicazione dell’induzione RF, vengono utilizzate bobine a radio frequenza, le quali sono in grado di fornire all’ingresso della catena di ricezione una tensione che dipende direttamente dalla magnetizzazione attraverso la mappa di sensibilità12 della bobina Br(r) (segnale NMR):
( )
r( ) ( )
volume V t B r M r ,t dr. t t Φ ∂ ∂ = − = − ⋅ ∂ ∂∫∫∫
B.55La dipendenza della magnetizzazione dal vettore posizione r è dovuta al fatto che, per ottenere informazioni sulla localizzazione spaziale e quindi distinguere spazialmente i nuclei, si impongono variazioni spaziali sul campo magnetico di polarizzazione mediante l’applicazione di gradienti di campo magnetico. Il loro effetto consiste nel fare oscillare le regioni del volume in esame ciascuna ad una propria frequenza di risonanza; in altre parole i gradienti hanno il ruolo di modificare il campo statico B0 in modo che il segnale emesso da un punto dipenda in modo univoco dalla sua posizione nello spazio.
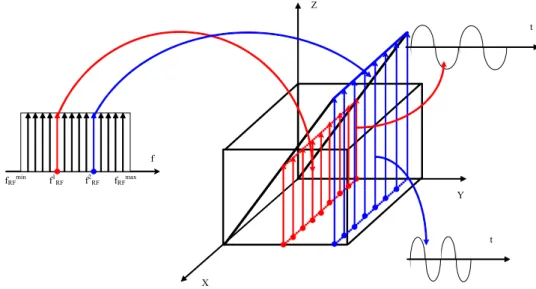
Supponendo ad esempio di avere un gradiente unicamente diretto nella direzione y, il campo di polarizzazione statico assume la forma B(x,y,z)=(B0+Gyy) ˆz (Gy è l costante che definisce l’entità della variazione spaziale del gradiente).
f f2 RF f1 RF fRFmax fRFmin X Y Z t t
Figura B-41 – Applicazione di un gradiente nella direzione dell’asse y
In tal caso (Figura B-41) tutti i nuclei che si trovano sui piani ad y costante risuonano alla medesima frequenza e quindi sono gli unici a concorrere alla risposta a tale frequenza.
Si comprende quindi come la composizione di un gradiente con tre componenti, consenta una localizzazione puntuale.
Infatti nella realtà, sono applicati distinti gradienti nelle tre direzioni principali del sistema di riferimento, definiti dalle costanti Gx,Gy,Gz, imponendo un campo magnetico di polarizzazione risultante pari a:
0 x y z ˆ
Il gradiente di campo magnetico utilizzato è lineare in modo che il campo e la frequenza risultante siano variabili linearmente con la distanza.
Con l’utilizzo del gradiente di campo magnetico si ottiene che la frequenza di risonanza nei piani perpendicolari alla direzione del gradiente stesso è costante: in questo modo, effettuando l’analisi dello spettro del segnale ricevuto, l’ampiezza spettrale di una particolare frequenza corrisponde direttamente al contributo nel segnale di tutti i nuclei giacenti sul piano perpendicolare alla direzione del gradiente di campo applicato.
Il segnale ricevuto viene quindi analizzato mediante la Trasformata di Fourier per ottenere la mappa della distribuzione spaziale dei momenti magnetici.
I valori dei gradienti variano secondo gli apparecchi tra 0.05 e 1 Gauss/cm in dipendenza della risoluzione spaziale desiderata. Il campo statico deve avere valore superiore al Tesla per motivi di sensitività ma non deve superare i limiti di tollerabilità.
B.3 Parametri caratteristici delle bobine RF
Le prestazioni delle bobine RF influenzano fortemente quelle dell’intero sistema RM, dunque si rende necessaria una progettazione molto accurata di tali sensori. A tale scopo è necessario indicare quali siano i parametri caratteristici di queste antenne, utilizzate sia per la trasmissione del segnale RF che per l’acquisizione del segnale NMR [16].
Sebbene talvolta sia utilizzabile una sola bobina, in generale vengono impiegate bobine distinte per le due fasi, che richiedono differenti requisiti.
Per ottenere immagini MRI di alta qualità, le bobine RF devono possedere dei requisiti fondamentali:
• quando è utilizzata in trasmissione, una bobina deve generare un induzione magnetica omogenea nel volume di interesse in modo da eccitare uniformemente i nuclei dei tessuti (potendo così imputare variazioni della frequenza di risonanza esclusivamente all’effetto dei gradienti o della tipicità molecolare locale del tessuto) e deve possedere un campo di vista (FOV) elevato poiché spesso la regione di interesse non è perfettamente nota a priori;
• quando utilizzata in ricezione, deve avere un elevato rapporto segnale rumore (SNR) e deve poter ricevere il segnale RF con lo stesso guadagno per ogni punto del volume in esame e questo, per il principio di reciprocità, corrisponde ad avere un’induzione magnetica uniforme nell’ipotesi in cui la stessa bobina sia utilizzata in trasmissione [15].
L’esigenza di incrementare la risoluzione spaziale nell’analisi MRI, ha condotto all’utilizzo di campi statici intensi (fino ad 8T), ovvero all’utilizzo di un segnare RF di qualche centinaio di MHz. L’elevata frequenza operativa ha infatti reso possibile l’ottenimento di un elevato valore del rapporto segnale rumore (SNR). Un altro parametro di rilevante importanza è il fattore di qualità Q, che quantifica le perdite introdotte dalla bobina.
B.3.1 Segnale NMR e reciprocità della bobina
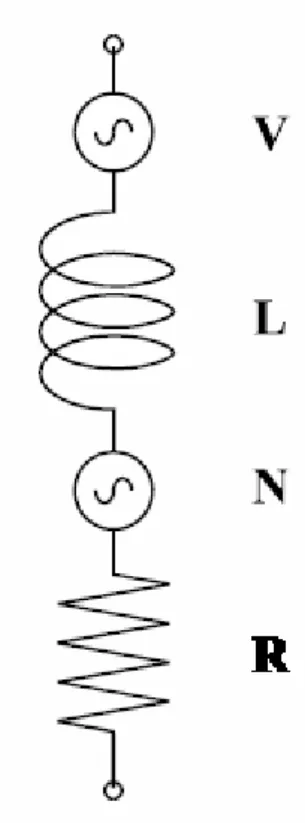
Una maggiore comprensione del problema, è possibile dalla schematizzazione di una bobina di ricezione, tramite la serie riportata nella Figura B-42, nella quale:
Figura B-42 – Circuito equivalente di una bobina RF di ricezione
• V rappresenta la tensione associata al segnale NMR; • N indica il rumore additivo al segnale utile;
• L è l’induttanza propria della bobina; • R include le perdite introdotte dalla bobina.
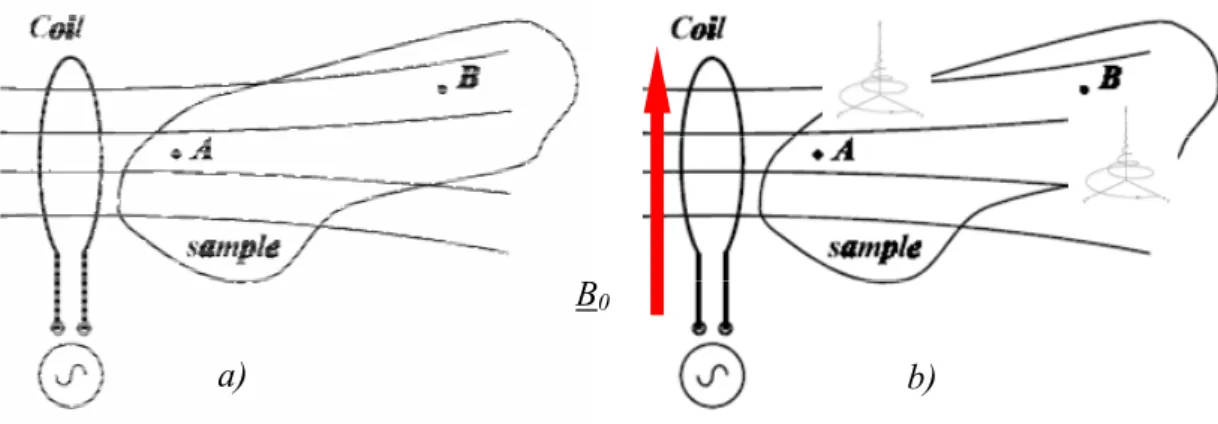
Lo scorrimento di una corrente attraverso la bobina, ha l’effetto di produrre l’insorgenza di un’induzione magnetica B1, decrescente all’aumentare della distanza dalla bobina. In riferimento alla Figura B-43-a il campo nel punto A più vicino alla bobina è superiore a quello
nel punto B. Dualmente, considerando invece due nuclei posizionati in A e B, nella fase di rilassamento del vettore magnetizzazione (Figura B-43-b), il primo di questi induce nella bobina un segnale di intensità maggiore. Questo è garantito dal principio di reciprocità [15] secondo il quale l’intensità dell’induzione B1 prodotta da una bobina in trasmissione in un punto interno al campione, equivale alla sensibilità della bobina stessa in ricezione.
Conseguentemente la massimizzazione del segnale NMR, si persegue massimizzando l’induzione B1 prodotta dalla stessa bobina nel campione.
Tale requisito viene soddisfatto in fase progettuale:
• progettando bobine le cui dimensioni sono più prossime possibile a quelle del campione. Questa caratteristica è quantificata attraverso il parametro filling factor, definito come rapporto fra il volume del campione e quello utile della bobina;
• riducendo il più possibile tutte le cause di perdita, quantificate attraverso il fattore di qualità.
a) b)
B0
Figura B-43 – Applicazione del principio di reciprocità
B.3.2 SNR di una bobina RF
La resistenza R che compare nel circuito equivalente di una bobina, rappresenta la somma di tutti i contributi ri associati ai diversi meccanismi di perdita R=∑ ri.
La tensione di rumore N, è solitamente associata al rumore termico della resistenza R:
N = 4KTR f ,∆ B.57 essendo K la costante di Boltzamm, T la temperatura e ∆f la banda di acquisizione del segnale.
L’importanza della relazione (B.50) risiede in un’interpretazione basata sul principio di equivalenza, quando si osservi che i meccanismi di perdita in trasmissione (R), rappresentano rumore termico in ricezione (N).
Di seguito sono descritte le cause di perdita tipicamente presenti.
B.3.2.1 Perdite ohmiche nel conduttore
Queste perdite sono provocate dalla resistenza ohmica del conduttore che realizza la bobina, dipendendo dunque dalla conducibilità e dalla geometria della configurazione. Al crescere della lunghezza complessiva del filo, si ha un incremento delle perdite. La ridotta profondità di penetrazione conseguente alle elevate frequenze di lavoro, limita la sezione trasversa disponibile al flusso di corrente e quindi comporta un incremento delle perdite stesse.
B.3.2.2 Perdite dovute all’interazione magnetica nella regione di campo vicino
Il posizionamento del campione internamente alla bobina, comporta un funzionamento nella regione di campo vicino (§.3.1). In tal caso, il campo elettrico e quello magnetico non sono legati da una relazione di onda piana e dunque i loro effetti debbono essere analizzati separatamente.
L’induzione magnetica B1 prodotta nella regione di campo vicino da una bobina in trasmissione, comporta una corrente indotta nel campione dotato di conducibilità (1.13-1.56). La conseguenza diretta è una dissipazione della potenza trasmessa.
Considerando invece la bobina in ricezione, la presenza di corrente a RF nel corpo conduttore, provoca l’insorgenza di un’induzione RF che concatenandosi con la bobina origina del rumore ricevuto.
Poiché l’accoppiamento magnetico fra campione e bobina sta alla base del funzionamento del sistema, tale causa di perdita non può essere eliminata, ma semplicemente ridotto attraverso una progettazione adeguata che assicuri una distribuzione del campo magnetico prevalentemente contenuta nella regione di interesse (ROI) e con una minima componente assiale dato che questa non contribuisce alla risonanza dei nuclei.
B.3.2.3 Perdite dovute all’interazione elettrica nella regione di campo vicino
La generazione di un campo elettrico nella regione di campo vicino è dovuta alla presenza sulla bobina di punti aventi potenziale elettrico differente.
Tale campo elettrico provoca l’insorgenza di correnti RF dissipative nei materiali con conducibilità finita, quali ad esempio il campione. Nel caso invece di interazione con dielettrici si origina una corrente di spostamento e se il dielettrico possiede delle perdite, si perviene ad un accrescimento del rumore. Le principali sorgenti di campo elettrico sono i condensatori utilizzati per portare in risonanza la struttura.
Il campo elettrico prodotto internamene alla struttura è stato oggetto di studio nel §.4 in quanto potenzialmente dannoso per il paziente. Un criterio di progettazione mirato alla riduzione del campo elettrico in prossimità della bobina, non contrasta la presenza di campo magnetico in quanto nella regione di campo vicino non si sostengono mutuamente.
B.3.2.4 Perdite dovute alla radiazione elettromagnetica
Poiché le bobine RF sono antenne elettricamente compatte, in quanto rispettano quanto discusso in §.3, le regioni di campo reattivo vicino e di campo lontano (Fraunhofer) sono contigue.
Poiché per il funzionamento viene sfruttato solamente il campo vicino, l’energia associata al campo lontano rappresenta energia irradiata e dunque perduta.
A tal proposito si provvede ad una schermatura della bobina. Lo schermo ha anche il duplice scopo di disaccoppiare la bobina RF dai gradienti utilizzati per variare localmente l’induzione statica.