Capitolo 2: Analisi del metodo di sintesi scelto
2-1 Generalità
In questo capitolo ci proponiamo di descrivere i diversi metodi di deformazione che sono stati implementati.
Come detto in precedenza i metodi di sintesi diretta sono i più utilizzati nel caso in cui si debbano realizzare antenne a riflettore sagomato, di conseguenza abbiamo utilizzato tali metodi per la realizzazione del nostro progetto.
Prima di passare all’analisi delle specifiche del progetto vediamo in dettaglio i vari metodi di sintesi diretta che si sono utilizzati.
Il metodo di sintesi diretta da noi utilizzato consiste nella ricerca di una Superficie di Deformazione da sommare ad una superficie base (paraboloide) in modo da ottenere il diagramma di irradiazione richiesto:
Z
( )
x,y = Zb( ) ( )
x,y +δ x,y (2.1) dove• Z(x,y) è la superficie del riflettore finale, cioè quella deformata
• Zb
(
x,y)
è la superficie base
Cioè partendo inizialmente da una superficie base la quale dà origine ad un certo diagramma di irradiazione, si vuole perturbare tale diagramma di irradiazione effettuando delle deformazioni sulla superficie che lo ha generato.
Questo modo di procedere consente di inizializzare il metodo di sintesi da antenne aventi un diagramma di irradiazione con caratteristiche simili a quelle richieste (si veda capitolo 3).
La superficie di deformazione sarà caratterizzata da alcuni coefficienti che rappresentano le incognite del problema, e che verranno determinati mediante un procedimento iterativo basato su un Algoritmo Genetico. In questo lavoro vengono analizzati tre metodi che ci consentono di costruire la superficie di deformazione ottimale:
• DEFORMAZIONE MEDIANTE POLINOMI RETTANGOLARI • DEFORMAZIONE MEDIANTE POLINOMI DI ZERNIKE • DEFORMAZIONE MEDIANTE FUNZIONI B-SPLINES
Di seguito analizziamo in dettaglio i tre metodi menzionati in precedenza.
2.2 Deformazione mediante polinomi rettangolari
In questo caso la superficie di deformazione viene descritta mediante polinomi rettangolari del tipo:
∑
∑
= = ⎟⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = n ij m B y y A x x c y x 0 j 2j i 0 i ) ( , 0 0 δ(2.2)
in cui• x e 0 y individuano il centro dell’apertura; 0
• A e B indicano i semiassi dell’apertura;
• m e n fissano il grado massimo del polinomio
• c costituiscono l’insieme dei coefficienti incogniti da ij
determinare mediante il metodo iterativo.
La funzione δ nella (2.2) determina il tipo di deformazione della superficie del riflettore, e di conseguenza l’andamento del diagramma di irradiazione dell’antenna.
Osserviamo che nella (2.2) il polinomio presenta una struttura di funzione pari rispetto alla variabile y. Questo al fine di ottenere una deformazione simmetrica della superficie rispetto al piano YZ, che è condizione necessaria affinchè il diagramma di irradiazione sia simmetrico sul piano azimutale.
Nel caso in cui si fosse interessati ad avere un diagramma di irradiazione simmetrico sia sul piano di elevazione e sia sul piano di azimuth, allora dovremo utilizzare anche un esponente 2i in corrispondenza della variabile x. In tal caso il polinomio prende la forma sguente:
∑
∑
= = ⎟⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = n ij m B y y A x x c y x 0 j 2j i 0 i ) ( 0 2 0 , δ(2.3)
Di conseguenza note le specifiche dovremo fissare i termini all’esponente nel polinomio di deformazione a seconda degli andamenti dei diagrammi di irradiazione richiesti.
La continuità e la derivabilità dei polinomi rettangolari assicura la regolarità della superficie finale.
Queste condizioni sono necessarie nel caso si utilizzino metodi di sintesi basati sulla Ottica Fisica (PO) [5].
2.3 Deformazione mediante polinomi di Zernike
Una classe di funzioni utilizzate in molte applicazioni è rappresentata dai polinomi di Zernike [12].
In questa sezione diamo la descrizione del metodo perturbativo attraverso l’uso di questi polinomi, richiamando alcune proprietà importanti.
Iniziamo con la definizione dei polinomi di Zernike, a tal fine denoteremo con x! e con [x] rispettivamente il fattoriale di x, qualora x sia un numero intero non negativo, e la parte intera del numero reale x. Definizione 1. Il polinomio di Zernike di ordine p è definito nel modo seguente: ⎪ ⎩ ⎪ ⎨ ⎧ = ≠ ≠ = 0 ) ( (2.4) 0 , dispari ) sin( ) ( 0 pari, ) cos( ) ( ) , ( 0 m R m p m R m p m R Zer n m n m n p ρ ϕ ρ ϕ ρ ϕ ρ per m ≤ n1, dove (2.5) , ) , ( ) ( n i m i i m n c n m R ρ
∑
ρ = =in cui i coefficienti ci = ci( mn, ) sono dati dalle seguenti relazioni:
[
]
[
]
(2.7) 0 (2.6) ! ! 2 / ) ( ! 2 / ) ( ) 1 ( 1 ] 2 / ) [( = − + − = + − m m n m c m m n n m c Sia quindi (2.8) dispari 2 1 pari 2 ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ + = i i i i ai allora(
)
(2.9) 1 2 2 2 i i i i i i a m a a m n a m n c c + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − ⎥⎦ ⎤ ⎢⎣ ⎡ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎥⎦ ⎤ ⎢⎣ ⎡ + − = +per ogni i=m,………..,n.
Osservazione 1. Gli interi n ed m nella Definizione 1 rappresentano rispettivamente il grado radiale e la frequenza azimutale. In particolare il numero n può essere dedotto dall’ ordine p usando la relazione
[ ]
(
1 8 7)
. (2.10) 2 1 , 1 1 1 − = + − = q q p nIl numero m si ricava dalla n nel modo seguente:
(
)
(
2 mod2 mod2)
, 2[
(
1)(
1 1)
]
. (2.11) 2 + + = + − − = q n q q n q n mIn seguito consideriamo gli interi m ed n come assegnati, slegandoli dal loro legame con l’ordine p. Tuttavia osserviamo che data una coppia di interi m ed n è sempre possibile determinare un intero p per cui m ed n soddisfano le equazioni (2.10) e (2.11).
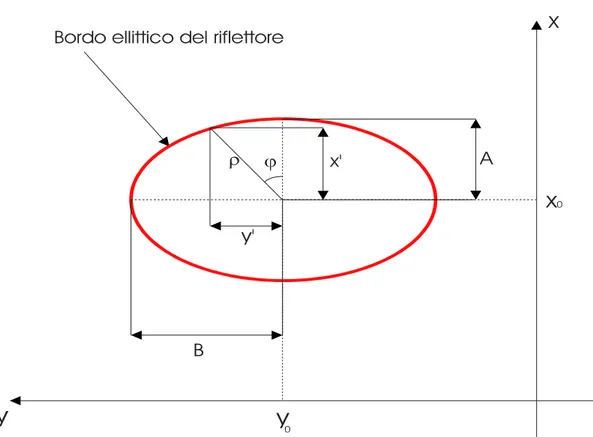
Le variabili ρ eϕ sono legate alle variabili cartesiane dalla seguente
trasformazione polare generalizzata, relativa ad un fissato centro
(
x0, y0)
ed alle lunghezze A, B >0 dei semiassi ellittici:
( )
( ) ( )
(2.12) ' ' arctan ' ' , 2 2 ⎪ ⎩ ⎪ ⎨ ⎧ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = + = = x y y x y x T ϕ ρ essendo (2.13) . -' , ' 0 0 B y y y A x x x = − =Per chiarezza riportiamo in figura 2.1 un disegno della relazione che
Figura 2.1: Disegno della relazione che intercorre tra
( ) (
x, y e ρ,ϕ)
.Richiamiamo ora alcune proprietà dei polinomi di Zernike.
• I polinomi di Zernike sono funzioni ortogonali nelle variabili x, y, nel dominio x2 + y2 <1.
• Essi sono invarianti rispetto ad una rotazione degli assi, cioè
Zerp(ρ,ϕ) = gp
( )
ϑ Zerp(
ρ,ϕ +ϑ)
, (2.14)dove g è una funzione continua e 2p π -periodica e ϑ è l’angolo di
• I polinomi radiali soddisfano la relazione di ortogonalità: 01
( ) ( )
m' d n n,n' (2.15) n m n R r R ρ ρ ρ = δ∫
dove rn è un coefficiente positivo e δn,n' è il simbolo di
Kronecker.
• I polinomi di Zernike normalizzati formano un sistema ortogonale completo.
Tornando al nostro problema di descrivere la deformazione ottimale da
aggiungere al paraboloide Zb, noi consideriamo la rappresentazione
( )
( )
(
(
)
)
(∑
)∈ − = S m n nm m n nmR m A w y x , (2.16) , cos , ρ ϕ ϕ δin cui w>0 è un fattore di scala, S definisce un insieme finito e prefissato di coppie di indici interi (n,m) non negativi con m≤n, e le variabili
nm
A (Ampiezza del modo di Zernike m,n) e ϕnm (Fase del modo di
Zernike m,n) rappresentano i coefficienti rispetto ai quali ottimizzare la forma della superficie Z.
Osserviamo che nella relazione (2.16), il generico termine può essere sviluppato nel seguente modo:
A(1)R
( ) ( )
ρ cos mϕ A(2)Rm( ) ( )
ρ sin mϕ , (2.17) n nm m n nm + dove(1) cos
(
)
(2.18) nm nm nm A m A = ϕ (2) sin(
)
. (2.19) nm nm nm A m A = ϕQuindi dalla (2.17) segue che il generico termine della somma si scrive come una combinazione di due polinomi di Zernike.
La modulazione del fattore di scala w offre un ulteriore grado di libertà rispetto alla scelta della deformazione δ.
2.4 Deformazione mediante funzioni B-Splines
In questa sezione introduciamo l’approccio con B-Splines alla deformazione della superficie. A tal fine richiamiamo alcune proprietà fondamentali di questa classe di approssimanti.
Definizione 2. Sia t =
{ }
ti i≥0 ⊂ I , dove I ⊂ è un intervallo, una ℜsuccessione (eventualmente infinita) non decrescente. La i-esima
B-Spline di ordine k per la sequenza t è indicata con Bi,k e si ottiene per
ricorrenza secondo il seguente algoritmo:
( )
(2.20) altrimenti 0 1 1 1 , ⎩ ⎨ ⎧ ≤ < = i i+ i t x t x B( )
( )
1, 1( )
(2.21) 1 1 , 1 , B x t t x t x B t t t x x B i k i k i k i k i i k i i k i + − + + + − + + − − + − − = per ogni x I∈ .Osservazione 2. In seguito assumeremo che la successione t sia formata da un numero finito di nodi dell’intervallo [0,1], detto intervallo dei
parametri, cioè t =
{
0 = t0 ≤ t1 ≤...≤ tm =1}
.In tal caso è sottointeso che le B-Splines saranno poste uguali a zero al di fuori dell’intervallo dei parametri.
Riportiamo alcune proprietà delle B-Splines:
• La generica B-Spline Bi,k, k≥1, è una funzione a supporto
compatto contenuto nell’intervallo
[
ti,,ti+k+1)
.• Dalla (2.21) ciascuna Bi,k è calcolata a partire da due B-Splines
di ordine k-1, ciascuna delle quali è a sua volta calcolata da due
B-Splines di ordine k-2, etc. Quindi Bi,k è costruita
ricorsivamente da una base di funzioni di grado 1.
• Notiamo che Bi,k ≥0 e che la somma di tali funzioni sull’indice
i è 1. Questo richiama la ben nota proprietà di partizione dell’unità di cui gode questa classe di funzioni.
La superficie di deformazione che considereremo per le simulazioni prende in questo contesto la seguente forma:
( )
, 0 (2.22) , 0 0 0 , 2 1 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − =∑ ∑
= = B y y B A x x B c y x q k j m i m j q k i ij δin cui l’ordine k≥1 è fissato, i coefficienti c descrivono, come al solito, ij
del riflettore mentre A e B sono le lunghezze dei semiassi del bordo ellittico del riflettore.
Le funzioni q
k i
B, , con q∈
{ }
d,p , sono definite di seguito:( )
( )
( )
(2.23) 0 , 0 , , , , ⎩ ⎨ ⎧ < − ≥ = x x B x x B x B k i k i p k i e( )
( )
( )
(2.24) 0 , 0 , , , , ⎩ ⎨ ⎧ < − − ≥ = x x B x x B x B k i k i d k i Quindi p k i B, e d k iB, rappresentano rispettivamente le estensioni pari e
dispari della i-esima B-Spline Bi,k .
Le motivazioni principali per questa scelta della rappresentazione della superficie di deformazione δ sono riassunte nei successivi punti:
• Fissare il centro del riflettore al fine di non modificare in quel
punto la superficie di base Zb.
• Data la struttura a supporto compatto delle B-Splines su [0,1], prolunghiamo per x<0 tali funzioni, al fine di produrre una
deformazione anche nel dominio x < x0 ,y < y0 .
• Con la scelta di q = p nella dipendenza dalla variabile x in (2.22) possiamo replicare il comportamento simmetrico che si ottiene nel caso della deformazione mediante polinomi rettangolari, si veda la sezione 2.2.
L’uso del simulatore necessita, nel caso si faccia utilizzo di una superficie diversa da quelle già previste dal simulatore stesso,
l’introduzione delle derivate prime e seconde della superficie che si intende utilizzare.
Poiché la forma funzionale (2.22) non è prevista all’interno del simulatore, nell’implementazione della deformazione con B-Splines, avremo bisogno di introdurre le espressioni delle derivate di (2.22). Dunque riportiamo il seguente Teorema di derivabilità per la cui dimostrazione rimandiamo al libro di Carl de Boor [8].
Teorema 1. Dato k≥2 intero e una sequenza non decrescente e finita t=
{ }
ti 0≤i≤m di numeri reali, sia{ }
Bi,k 0≤i≤m la relativa successioneB-Splines di ordine k. Allora per ogni α0,α1,....,αm∈ ℜla funzione
( )
∑
( )
= = Φ m i i ik x B x 0 , (2.25) , αammette derivate di ogni ordine 0 ≤ j ≤ k-1, e vale la seguente formula per la derivata di ordine j:
( )
1( )
, (2.26) 0 , ) 1 (∑
+ = − + = Φ m i ik j j i j j x B x dx d αcon
(
)
/(
)
0 (2.27) 0 ) ( 1 ) ( ) 1 ( ⎪ ⎩ ⎪ ⎨ ⎧ > − − − = = − + − + j j k t t j r j k r j r j r r j r α α α αper ogni r=0,….,m+1, essendo ( ) 0
1 ) ( 1 = + = − j m j α α , per ogni j.
Applicando il teorema 1, otteniamo il seguente Corollario.
Corollario 1. Sia k ≥ 2 e sia assegnata la successione di B-Splines di
ordine k corrispondente alla sequenza 0 = t0 ≤ t1 ≤ ....≤ tm =1.
Allora per ogni coppia di interi 0 ≤ r, s ≤ k-1, la funzione (2.22) ammette la derivata di ordine r+s. Inoltre vale la formula:
( )
, 1 , 0 , (2.28) , 0 0 0 , , 2 1 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ∂ ∂ ∂∑ ∑
= = + B y y B A x x B B A c y x y x s q k j m i m j r q k i s r ij s r s r δdove per ogni 0 ≤ µ≤ k-1, q∈
{ }
p,d ,ξ ∈ℜ ,i = 0,...,m, si ha:( )
( )
1( )
0 (2.29) 0 ) ( , , , , , ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ < − − ≥ = + ξ ξ ξ ξ ξ ξ ξ µ µ δ µ µ µ µ k i k i q k i B d d B d d B d qDimostrazione del corollario 1. La dimostrazione segue
immediatamente se si osserva che Bi,k, con k ≥ 2 e 0 ≤ i ≤ m, ha
supporto strettamente contenuto in (0,1], quindi le estensioni pari e dispari (2.23) e (2.24) sono funzioni derivabili fino all’ordine j ≤ k-1. Poiché la funzione (2.22) è una combinazione lineare di tali funzioni, essa è differenziabile rispetto ad entrambe le variabili x ed y fino all’ordine j ≤ k-1.
Osservazione 3. Chiaramente nella scrittura del gradiente e della matrice Hessiana di (2.22), in vista del precedente corollario e della (2.29) introdurremo la relazione ricorsiva (2.27) per calcolare le
derivate della funzione Bi,k, ponendo αi =1eαr = 0 ,per r ≠i nella