14
14
CONCLUSIONI
14.1 Introduzione
Attraverso il lavoro compiuto in questa tesi sono stati raggiunti tutti gli ob-biettivi che erano proposti all’inizio. Il punto più importante e l’essere riusciti a dare una risposta alla domanda più importante, cioè che è possibile creare una nuova clas-se di satelliti per osclas-servazione della Terra, in orbita molto bassa, utilizzando una classe di propulsori, fino ad ora adoperata in modo diverso, i motori ad effetto Hall, per correggere la perdita di quota dovuta a resistenza atmosferica, e sembra portare numerosi vantaggi rispetto alle missioni ed alle piattaforme attualmente in opera. Qui di seguito riproporremo, in formato più sintetico, senza il peso dell’analisi numerica e senza riproporre tutte le diverse configurazioni analizzate, tutti i principali risultati, sia dal punto di vista della parte di analisi della missione che dal punto di vista del progetto del satellite.
14.2 Riassunto del lavoro
14.2.1 Analisi di missione
Lo sviluppo dell’orbita di riferimento è partito dall’analisi della zona di ac-quisizione dati, da quella specifica risulta chiara l’impossibilità di scendere al di sotto dell’inclinazione 46 gradi per non lasciare dei buchi di copertura. Ponendo un limite inferiore alla quota minima raggiungibile a 200 km abbiamo limitato la scelta a sole tre possibilità di semiasse perché fosse raggiunto l’obbiettivo di ripetizione massima del passaggi a Terra a tre giorni. Da questi semiassi ideali, perché calcolati attraverso la teoria dei due corpi, con il calcolo della variazione di argomento del nodo ascen-dente, è stato possibile risalire a tre semiassi reali, nell’ipotesi di trascurare gli effetti del Sole e della Luna, molto minori di quello associato alla non sfericità terrestre.
I-potizzando un intervallo di ricerca delle eccentricità, in maniera che la quota minima fosse superiore a 200 km, si ricerca la variazione di velocità, sfruttando le formule ricavate da Edelbaum, e quindi il rapporto massa propellente massa iniziale per ogni configurazione, limitando la scelta delle possibili inclinazioni a due: 46 gradi e 63.435 gradi, la prima perché orbita limite inferiore e la seconda perché inclinazione critica, viene bloccata la posizione del perigeo, utilizzando una procedura di control-lo del riposizionamento attraverso una procedura di circolarizzazione e successiva ellitticizzazione giornaliera. Ricercando la soluzione col miglior rapporto tra le mas-se, miglior utilizzo delle capacità di copertura, miglior copertura percentuale, massi-mo tempo di accesso all’area, miglior utilizzo della quota minima abbiamassi-mo raggiunto come risultato che l’orbita ideale si trova a 289.716 km di quota ad un’inclinazione di 46 gradi ed è circolare.
Un satellite di questo tipo, riesce quasi da solo a produrre i requisiti di coper-tura totale dell’area di acquisizione, attraverso l’utilizzo di uno dei sensori più avan-zati dotati di specchi mobili. Come da analisi al propagatore orbitale, software STK, ampiamente riportata, si vede che rimangono solo pochi buchi nelle zone più meri-dionali dell’area bersaglio, questo fatto è dovuto sia alla bassa quota che alla relati-vamente bassa inclinazione. Infatti il satellite entrando nella zona con una traccia a Terra molto orizzontale, permette una minor separazione tra un punto posto sulla traccia e la traccia relativa all’orbita successiva.
Per migliorare la copertura e per migliorare la ripetitività si è pensato di sfrut-tare una piccola costellazione. Le specifiche di Vega hanno permesso di pensare ad una costellazione di tre satelliti lanciati contemporaneamente.
La migliore scelta è quella di posizionare i tre satelliti su orbite separate con un ∆Ω di 120 gradi, per avere passaggi in direzioni diverse ad ore diverse in maniera da effettuare una triangolazione dei dati e da fare acquisizioni più o meno equispazia-te duranequispazia-te il giorno; aggiungendo anche una separazione ∆υ = 120° per evitare scon-tri in orbita. Il metodo più semplice di ottenere questa separazione sarebbe quello di utilizzare l’effetto della non sfericità terrestre, effetto che è, però, molto lento limi-tando l’iniziale utilizzo della costellazione. Altri sistemi potrebbero essere l’utilizzo del lanciatore stesso o dell’apparato propulsivo partendo da orbita opportuna per una minimizzazione del ∆V necessario. Si rimanda, però, ad uno stadio di progettazione più avanzato per un’analisi più approfondita di tutte le manovre per scegliere quelle che rendano massimo il rapporto prestazioni-costo.
14.2.2 Progetto piattaforma
Il progetto della piattaforma è stato sviluppato ricercando componentistica nota e già provata in volo, quando possibile, in modo da mantenere costi bassi e da limitare l’utilizzo di tecnologia nuova all’apparato propulsivo.
Il primo sistema ad essere stato determinato è quello dei carichi paganti da imbarcare.
La ricerca di questi sensori è stata basata su sistemi già esistenti. L’analisi in-crociata tra le possibili apparecchiature, i risultati delle acquisizioni ed i possibili u-tenti finali hanno portato a scegliere due diversi tipi di sensori, entrambi del tipo mul-tispettrale con rilevatori CCD (coupled charge detectors, rilevatori a carica accoppia-ta) digitali. Il primo orientato ad un acquisizione dati nel campo della radiazione vi-sibile, il secondo anche nell’infrarosso. Per quanto riguarda il primo sensore non es-sendone stati trovati in letteratura ed in commercio di adeguati alla missione, essendo tutti di dimensioni troppo elevate, poiché la nostra missione si pone ad una quota net-tamente inferiore a qualunque altra, è stato necessario cercare di progettarne uno par-tendo da sistemi già esistenti. La soluzione è stata ottenuta limitando la lente, para-metro che influenza il peso del sistema, in maniera, però, da non inficiare la risolu-zione, mantenendo un flusso di dati entro livelli accettabili. Infatti il flusso di dati è la dimensione più critica incontrata, se troppo elevato, rispetto alla possibilità di sca-ricare a Terra le informazioni, c’è il rischio del blocco del sistema. Per il sistema che lavora nel campo dell’infrarosso è stato trovato ed adattato al caso il sensore CHRIS della Sira electrooptics. Un’analisi delle scelte effettuate è riportata in tabella 5.7-2.
La parte di telemetria e telecomando di bordo viene valutata a partire dall’esame di un appropriato ventaglio di soluzioni del segmento di Terra, determi-nando che la risoluzione corretta, data la relativa facilità e semplicità di costruzione, è quella di approntare una stazione dedicata interamente alla nostra missione, ponen-do l’antenna nelle vicinanze del centro dell’area di acquisizione, per esempio a Pisa. In condizioni di emergenza o per acquisizioni di emergenza si può far ricorso ad una qualunque delle stazioni del gruppo ESA-ESOC, sufficientemente lontana dalla sta-zione principale in maniera da non generare un conflitto di risorse. Lo schema della parte di comunicazione si rifà ad una configurazione standard: tre antenne, due ad e-levato guadagno, di forma parabolica, ed una omnidirezionale, un interruttore a ra-diofrequenza, un diplexer, i filtri ed un trasponder. Il sistema antenna viene pensato del tipo a ciclo chiuso, cioè in grado di posizionarsi e stabilizzarsi sulla frequenza del segnale entrante autonomamente, mentre la trasmissione viene ad essere a due vie coerenti; ciò significa che la trasmissione può avvenire in entrambe le direzioni con-temporaneamente. Per il sistema di puntamento ed il trasponder la soluzione è basata su strumenti in commercio. Per il diplexer, gli interruttori ed i filtri il dimensiona-mento del peso è fornito da dati empirici. L’analisi completa è al capitolo 6 e le scel-te effettuascel-te sono esaminascel-te in tabella 6.5-2.
Per la parte di elettronica di gestione dati, studiando una configurazione co-mune alla maggior parte dei satelliti, si scelgono componenti già esistenti e speri-mentati con successo in altre missioni, si veda a proposito il capitolo 8.
Legato alla precisione dei calcolatori, del puntamento delle antenne e dei ca-richi paganti è la scelta del sistema di controllo d’assetto. Una prima scelta è legata al tipo di controllo, tra le tre possibili vie, a gradiente di gravità, a rotazione ed a tre as-si, viene scelta quest’ultima, perché più efficace. La componentistica è scelta sulla base di conti conservativi sulle coppie agenti sul sistema provenienti da aerodinami-ca, gradiente di gravi, radiazione solare e campo magnetico. Sulla base dei requisiti sulla precisione di puntamento viene considerato l’utilizzo di più sensori in contem-poranea per garantire maggiore accuratezza nella determinazione dell’assetto. La scelta cade su: un sensore di Sole per la sua precisione, economicità ed il comune uti-lizzo nei satelliti stabilizzati a tre assi; un sensore di Stelle, in maniera da ovviare alla mancanza del Sole in eclissi, data la sua elevata precisione, specialmente nei sistemi chiamati mappatori; un sensore di Terra per il puntamento in direzione nadir; un ma-gnetometro, che viene utilizzato per confermare le rilevazioni degli altri sensori.
Per ciò che concerne gli attuatori la scelta è basata su soluzioni commercial-mente disponibili. Si pensa di dotare il satellite di una configurazione ortorombica di ruote di reazione, al posto delle ruote di momento meno precise, con problemi di vi-brazioni che possono rovinare l’acquisizione immagini, ed una configurazione ana-loga, ad essa affiancata, di torsori magnetici, un sistema passivo basato sull’iterazione tra il momento di dipolo auto-prodotto ed il campo magnetico terre-stre. Tutti questi componenti, dotati di opportuna ridondanza, rientrano ampiamente nei requisiti di precisione richiesti avendo al contempo una bassa potenza assorbita e basso peso. Tutti le scelte sono visibili in tabella 9.6-1.
Accanto al sistema di controllo d’assetto è necessario un sistema di naviga-zione che fornisca i dati sulla posinaviga-zione del satellite per provvedere alle adeguate cor-rezioni. Per fare ciò la opzione più opportuna è quella di legare la missione al sistema satellitare europeo Galileo. Per un’analisi approfondita delle qualità e dei servizi da esso forniti si fa tornare al capitolo 11.
Collegabile al sistema di controllo d’assetto è il sistema di propulsione. Esso viene utilizzato per controllare la posizione del satellite nella direzione nadir. Basan-do la scelta sulla bassa potenza assorbita, gli elevati impulso specifico, spinta ed effi-cienza, si ricava che, tra i motori ad effetto Hall, quello che si avvicina di più alle no-stre specifiche è un motore Russo, il KM-37 del centro ricerche Keldish, Научний Центр имени Келдыша. Per confermare la scelta viene ricercato il tempo di accen-sione massimo che il propulsore deve sostenere, calcolando anche il periodo in orbita di parcheggio per separazione piani. Se si fa riferimento ad una manovra per orbita il risultato è fuori dal campo previsto dal produttore di circa 50 ore, ma già scendendo a una manovra ogni due orbite il risultato è ampiamente all’interno dei limiti, anche di sicurezza. Per quanto riguarda i componenti ausiliari, la PPU, i condotti e le valvo-le la determinazioni dei pesi è basata su dati empirici. Per il serbatoio, invece, si
cer-ca di cer-calcolarne un peso quanto più corretto, ipotizzando una struttura circolare di ti-tanio, scelta comune, ma già datata, la scelta va sempre più verso materiali come il Kevlar. Un’analisi immediata dei vantaggi e degli svantaggi delle scelte compiute è riportata in tabella 7.3-2
Tutti questi componenti per funzionare devono essere riforniti di energia, per questo viene progettato un sistema fotovoltaico per generare potenza. La scelta del sistema fotovoltaica è quella più comune ed è quasi obbligata. Come cella solare si sceglie la cella a giunzione tripla perché sufficientemente avanzata da diminuire le dimensioni dei pannelli, ma di tecnologia già provata. Come cella della batteria la preferenza spetta a quella agli ioni di litio, nonostante sia una tecnologia ancora poco utilizzata, per l’elevata potenza specifica, che ci permette di abbattere i pesi di questo componente, e per molte altri vantaggi riportati in tabella 10.9-3. Attraverso un op-portuno algoritmo di calcolo, si determina il numero dei pannelli è la loro disposizio-ne, il numero delle celle solari sui vari pannelli, il numero delle celle di cui sono composte le batterie, la temperatura del pannello solare.
Il circuito elettrico viene pensato non controllato, con il pannello solare dota-to di shunt reguladota-tor che audota-tomaticamente taglia la corrente in eccesso, una PDU che distribuisce la potenza tra i vari componenti e convertitori ai contatti coi carichi. Per sfruttare una maggiore semplicità il pannello viene pensato ripiegato attorno al corpo del satellite durante la fase di preparazione e lancio e dispiegato attraverso interrutto-ri pirotecnici e molle di torsione. Per il progetto completo si veda il capitolo 10.
Legata alle dimensioni del pannello è la struttura. Per numerose ragioni tra cui principalmente la necessità di porre il baricentro nelle vicinanze delle ruote di re-azione ed all’interno di vincoli previsti dal lanciatore, questa è pensata essere divisa in due parti, due prismi a base esagonale di lato 0.55 m ed altezza 1 m collegati da un pilone centrale di dimensioni ridotte che funge da collegamento, smorzatore di vibra-zioni, supporto per le antenne e collegamento col lanciatore. Nella parte frontale, ri-spetto alla direzione di volo, sono pensati essere i carichi utili, per allontanarli da sorgenti di calore e di vibrazioni quali possono essere i propulsori e le ruote di rea-zione, i sensori, per analoghe ragioni e il calcolatore dei dati prodotti dai sensori, per diminuire il numero di cavi. Questa parte frontale, all’atto del montaggio sul lancia-tore sarà la parte inferiore, sulla superficie frontale è pensato porre un sistema di ag-gancio alla superficie di separazione del modulo finale del lanciatore Vega. Nella parte inferiore i propulsori, montati su una struttura esterna, orientati in modo da di-minuire la coppia di imbardata e circondati da un cono di protezione, le batterie e la restante parte di elettronica per problemi di peso, le ruote di reazione ed i torsori ma-gnetici per posizionarli vicini al baricentro. Per uno sviluppo più puntuale dell’analisi si rimanda al capitolo 12 e per un’analisi più efficace dei vantaggi e degli svantaggi riscontrati alla tabella 12.5-7.
Legata a questa disposizione è, infine, il sistema di controllo della temperatu-ra. Le temperature dei vari componenti vengono determinate sulla base delle potenze dissipate, ipotizzate il 100% per le componenti elettroniche ed il 20% per le compo-nenti meccaniche, per il propulsore è invece il 30%, ipotizzando un trasferimento di calore solo conduttivo, cioè temperature molto vicine. Utilizzando un approccio a preferenza fredda, cioè ipotizzando le temperature massime dei vari componenti po-co sotto il massimo del proprio intervallo di temperature operative, si determinano le resistenze termiche dei contatti, che servono a determinare le temperature minime. Per mantenere le temperature negli intervalli previsti è stato necessario dotare le su-perfici rivolte verso Terra di una copertura, diversa tra la parte frontale e quella po-steriore, Mylar nel primo caso ed Aclar nel secondo. Tutti i contatti, nell’ipotesi che siano sei e spessi un millimetro, sono risultati possibili utilizzando appropriati mate-riali. Tutti i procedimenti utilizzati sono riportati nel capitolo 13.
Nelle tabelle qui di seguito sono riportate le potenze, i pesi ed i volumi asso-ciati ai vari componenti.
tabella 14.2-1 Bilancio di massa e potenza carico pagante
COMPONENTE Peso, Kg Potenza, W Note
CARICO PAGANTE
Carico Pagante 1 (V) 15 16 da Progetto
Carico Pagante 2 (TIR) 14 15 CHRIS (4-10 µm)
Totale del sistema 29 31
tabella 14.2-2 Bilancio di massa e potenza sistema di propulsione
COMPONENTE Peso, Kg Potenza, W Note
PROPULSIONE
Propellente 13,1 0 da Progetto
PPU 2 x 1.2 15 Peso = 2 x 4 · kW
Serbatoio 2,6 0 Peso = 20% Wprop (valore con-servativo)
Motori 2 x 1.5 200 (300) Peso = 2 x 3,5 · kW Linee, Valvole e
Con-dotti 0,3 5 Dati empirici
tabella 14.2-3 Bilancio di massa e potenza sistema di controllo d’assetto
COMPONENTE Peso, Kg Potenza, W Note
CONTROLLO D’ASSETTO
2 Sensori di Terra 2 x 3.5 7.5 STD-16 Earth Sensor EADS/SODERN 2 Tracciatori di Stelle 2 x 3.9 8.9 A-STR
Galileo Avionica 2 Sensori di Sole 2 x 0,39 1 Smart Sun Sensor S3
Galileo Avionica 2 Magnetometri 2 x 0,5 0.56 TAM-2, MEDA Inc. 4 Ruote di reazione 4 x 5 15 Configurazione Ortorombica
HR-0610, Honeywell 4 Torsori magnetici 4 x 4,12 3 Configurazione Ortorombica
MT80-1 Microcosm/ZARM
1 ADC Computer 5 7 da Progetto
Totale del sistema AD&C 59 43
tabella 14.2-4 Bilancio di massa e potenza sistema di comunicazione
COMPONENTI Peso, Kg Potenza, W Note
COMUNICAZIONE
Antenna Omnidirezionale 1 0 da Progetto
2 Antenna Direzionale 2 x 1 0 SAAB Aerospace
Transponder (Transmittore +
Rice-vitore) 3 6 - 26 Alcatel TRC S-Band
2 Filtri/Spostatori/Diplexer 2 x1.5 1 da Progetto 2 Sistema di Puntamento 2 x 4.2 3 - 17 CRIS SOHO
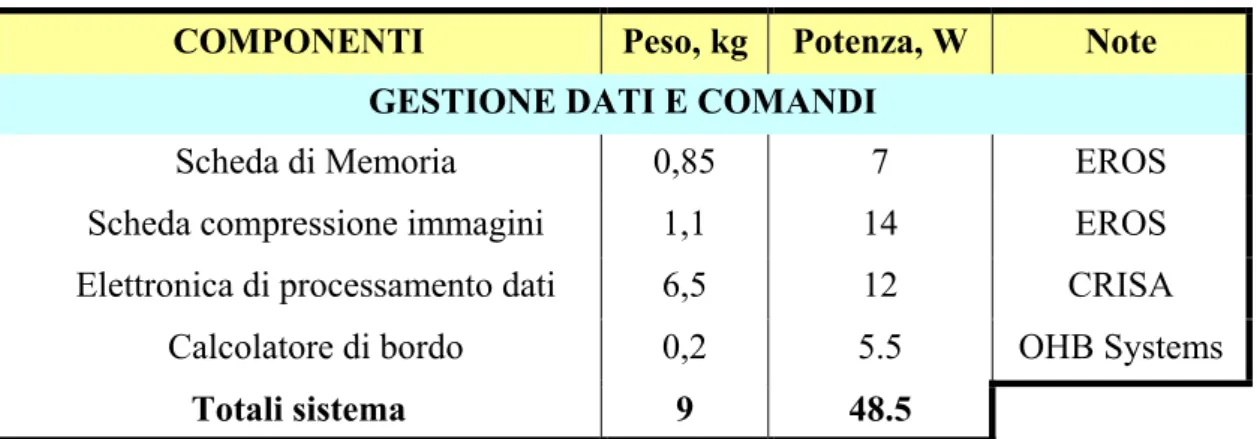
tabella 14.2-5 Bilancio di massa e potenza sistema di gestione dati e comandi
COMPONENTI Peso, kg Potenza, W Note
GESTIONE DATI E COMANDI
Scheda di Memoria 0,85 7 EROS
Scheda compressione immagini 1,1 14 EROS
Elettronica di processamento dati 6,5 12 CRISA
Calcolatore di bordo 0,2 5.5 OHB Systems
Totali sistema 9 48.5
tabella 14.2-6 Bilancio di massa e potenza sistema termico
COMPONENTI Peso, Kg Potenza max, W Note
TERMICO
Totali sistema 15 44 Peso = 5% Wdry
Potenza = 5% Ptot
tabella 14.2-7 Bilancio di massa e potenza sistema di generazione di potenza
COMPONENTI Peso, Kg Potenza, W Note
GENERAZIONE DI POTENZA
Pannello Solare 26,0 0 da Progetto
Struttura di Supporto 15,9 0 da Progetto
2 Batterie 2 x 5 0 – 244.0 da Progetto
2 Regolatori / Convertitori 2 x 19,7 20 – 90 Peso = 2 x 25% Pconv Potenza = 20% Pconv
2 Cablaggi 2 x 8 15 – 42 Peso = 0,04 · Msatellite Potenza = 5% Ptot
Totale sistema 105 35 – 350
tabella 14.2-8 Bilancio di massa e potenza strutture e meccanismi
COMPONENTI Peso, Kg Potenza, W Note
STRUTTURE E MECCANISMI
tabella 14.2-9 Bilancio di massa e potenza della piattaforma satellitare
PIATTAFORMA SATELLITARE
COMPONENTI Peso, Kg Potenza max, W Note
Totali Sottosistemi 310 950
14.3 Conclusioni
In conclusione attraverso il lavoro effettuato si è riuscito a determinare che è possibile effettuare una missione innovativa. La bassa quota a cui si arriva, circa 300 km, risulta meno della metà delle missioni attualmente attive per osservazione della Terra, che però hanno, il più delle volte, uno obbiettivo di copertura globale e non di una singola regione. Nel caso in esame, il satellite potrebbe benissimo funzionare per coprire l’intera fascia compresa tra 46 gradi di latitudine nord e 46 gradi di latitudine sud.
Bassa quota che permette di utilizzare carichi utili con potenze assorbite e pe-si molto minori di quelli, mastodontici, utilizzati per esempio su satelliti della classe Landsat o Spot. Cosa che si allaccia con la forma scelta per questa classe di satelliti, prismatica allungata. Sarebbe, infatti, molto difficile da ottenere se si dovesse imbar-care strumenti come il thematic mapper imbarcato dal satellite Landsat, lungo più di due metri e pesante qualche centinaio di chili. Forma che aiuta ad avere, assieme all’obbiettivo di basso peso, un ottimo coefficiente balistico che permette di ridurre notevolmente la resistenza atmosferica.
A questo punto entra in campo il propulsore elettrico ad effetto Hall prescelto che permette di superare agevolmente questa resistenza diminuendo al contempo la dissipazione di potenza, rendimento elevato, ed il peso di propellente da imbarcare, Isp molto più grande dei sistemi chimici, e mantenendo tempi di accensione bassi.
L’unico problema riguarda l’assorbimento di potenza elettrica, che rimane abbastan-za elevato.
Riassumendo si può dire che la bassa quota aiuta ad imbarcare strumenti più piccoli che a loro volta aiutano ad avere una sezione ridotta che, diminuendo la resi-stenza, a seguito del fatto che viene imbarcato un propulsore sufficientemente per-formante, permette di volare bassi.
Innovativo è anche il progetto di costruire una costellazione di pochi satelliti, normalmente costellazioni vengono utilizzate in orbita MEO (orbita terrestre a quota media, circa 10000 km) e sono composte da numerose decine di unità. Il vantaggio di
questa classe di satelliti legato al ridotto numero di unità è che si può inserire in orbi-ta l’intera costellazione con un unico lancio, date le caratteristiche del lanciatore, che permette l’inserimento a queste quote di una massa approssimativamente tre volte la massa di uno dei nostri satelliti, e, date le particolari caratteristiche, non si ha un peggioramento sensibile, rispetto alle prestazioni indicate in specifica sulla copertura e sul tempo di rivisitazione, nel caso di mancato funzionamento di uno dei compo-nenti, portando alla possibilità di una sostituzione “lenta”. Il vantaggio di questa con-figurazione è dunque legato a tutte le caratteristiche orbitali: bassa quota, inclinazio-ne, tempi di rivisitazioinclinazio-ne, utilizzo della propulsione elettrica, basso peso, etc.
Su alcune componenti è opportuno valutare, in fasi successive di progetto, o di modifica parziale del sistema, altre configurazioni, per esempio la possibilità di u-tilizzare pannelli dispiegabili a pantografo con l’obbiettivo di ridurre le dimensioni del satellite, ovvero imbarcare altri tipi di sensori, quale potrebbe essere un micro-SAR di ultima generazione, per effettuare rilevamenti anche in condizioni atmosferi-che difficili e per ampliare la gamma di servizi offerti. In questo caso, però andrebbe ripensato l’intero sistema di potenza e di trasmissione dati. Altra opportunità è quella di valutare eventuali propulsori ad effetto Hall di origine Europea con potenze assor-bite inferiori. Al contempo si può ricercare una procedura di controllo dell’assorbimento di potenza da parte dei sottosistemi per diminuire le dimensioni del pannello solare e quindi del satellite.