Piezoresistività e sensori piezoresistivi
1.1 Introduzione
Le strutture MEMS torsionali contengono in genere attuatori, che trasformano un segnale elettrico di ingresso in una torsione, e sensori, che rilevano una posizione angolare e la convertono in grandezza elettrica. Per quanto riguarda la parte di sensing dei risonatori torsionali, il tipo di misura più preciso (e anche più usato) è quello capacitivo; i sensori meccanici con rilevamento capacitivo ricavano la quantità desiderata, a partire da una misura di spostamento (ad esempio, il movimento relativo dell’elettrodo mobile di un condensatore, rispetto ad un elettrodo fisso di riferimento). In questo capitolo si introdurrà un metodo alternativo per la lettura della posizione angolare di un microrisonatore: la rilevazione piezoresistiva, che sfrutta la variazione di resistenza che certi materiali subiscono, se sottoposti a sollecitazioni meccaniche (ad esempio, una torsione). I sensori piezoresistivi presentano, rispetto a quelli capacitivi, alcuni svantaggi: sono meno precisi, perché più soggetti a disturbi causati dalla temperatura ed inoltre consumano una potenza maggiore. Perché, allora, ci si occupa di sensori piezoresistivi? Si immagini una struttura MEMS avente una parte di attuazione capacitiva ed una parte di controllo che deve rilevare lo spostamento, per mantenerlo stabile (figura 1.1, [1]): la figura rappresenta lo schema a blocchi di un circuito che preleva lo spostamento provocato da una struttura capacitiva e lo paragona con un valore di riferimento (x_ref); l’uscita del comparatore pilota un deviatore che genera un’onda quadra di tensione, la quale comanda la parte di attuazione e permette di mantenere lo spostamento sul livello voluto (con un certo ripple). Si osservi il grafico sottostante al diagramma a blocchi:
FIGURA 1.1: Schema della parte strutturale e della circuiteria di controllo di un MEMS con attuazione e sensing capacitivi. Grafico della tensione di attuazione e dello spostamento risultante.
Se si vuole rilevare lo spostamento provocato dall’attuazione, bisogna aggiungere almeno un elettrodo di sensing, dove non si invia alcun segnale e si legge semplicemente lo spostamento avvenuto. Questo è possibile se si ha spazio a sufficienza sul chip, da poter inserire elementi aggiuntivi. Si riporta l’immagine della parte strutturale del MEMS [1]:
FIGURA 1.2: Attuatore elettrostatico capacitivo, con parte di sensing; l’attuazione (actuation electrodes) provoca uno spostamento laterale della struttura solidale con le molle (in nero), causando una variazione di capacità, che viene letta dagli elettrodi di sensing (sensing electrodes).
Se non si ha spazio a sufficienza per elettrodi aggiuntivi e si vuole comunque inserire una parte sensoriale, può essere utile sfruttare il fenomeno della piezoresistività, che permette di ricavare l’informazione voluta con una semplice misura di resistenza, senza aggiungere alcun elettrodo.
I dispositivi torsionali oggetto di studio in questa tesi sono formati da un piatto rettangolare sospeso, sorretto da due molle incastrate ad un estremo. La torsione è provocata da una differenza di potenziale, applicata ad uno dei due elettrodi che si trovano sotto il piatto e che formano, assieme al piatto stesso, due condensatori. La figura 1.3 ne rappresenta uno schema: si nota il diaframma e le molle (in grigio) e gli elettrodi di attuazione (in verde); se si applica tensione all’elettrodo di sinistra, si verifica un’inclinazione del piatto verso sinistra (ugualmente, a destra). Le due superfici tratteggiate indicano le armature superiori dei due condensatori.
Punto di incastro
Piatto
FIGURA 1.3: Microrisonatore torsionale.
In un dispositivo del genere risulta impossibile aggiungere un elettrodo di sensing sotto il piatto, a meno che non si tolga spazio agli elettrodi di attuazione, indebolendo la forza elettrostatica che crea la torsione. Con una misura piezoresistiva si risolve il problema, perché basta misurare la tensione fra i due punti d’incastro (dopo aver applicato corrente) o viceversa; se si compie questa operazione dopo aver inclinato la struttura, si ricava il corrispondente valore di resistenza e lo si confronta con la resistenza a riposo (in assenza di sollecitazioni meccaniche), si può misurare l’angolo
Elettrodo di attuazione Elettrodo di attuazione Molle torsionali Punto di incastro
di torsione, verificando se l’attuazione è stata applicata correttamente. Anche se non si ottiene la stessa precisione che si avrebbe con una misura di tipo capacitivo, si guadagna in compattezza e semplicità di realizzazione. Una misura di tipo piezoresistivo, inoltre, fornisce informazioni sugli stress del materiale, quindi può essere utile anche per la rilevazione di eventuali stress residui nella struttura.
Il dispositivo analizzato è composto da una lega di silicio-germanio (SiGe), un materiale dalle buone proprietà meccaniche, termiche e piezoresistive: per approfondimenti sul silicio-germanio si rimanda alla lettura del secondo capitolo. Il principale risultato di questa tesi è il seguente: si è scoperto e dimostrato che esiste una relazione quadratica1 fra la variazione di resistenza ∆ e l’angolo θ di strutture R
torsionali con sezione simmetrica (rettangolare, circolare, ecc).
2
R αθ
∆ ≅
In questo capitolo saranno introdotte le principali quantità che determinano il comportamento strutturale di un materiale e l’idoneità ad applicazioni MEMS: le costanti elastiche; si elencheranno, infine, le principali nozioni teoriche sulla piezoresistività.
1.2 Proprietà meccaniche e piezoresistive dei materiali
1.2.1 Le costanti elastiche
Una sollecitazione meccanica applicata ad un materiale si traduce in una forza che agisce dall’esterno e si protrae nel volume del materiale stesso; tale forza, se considerata per unità di superficie, è definita stress (tensione) e si misura in N2
m
⎡ ⎤
⎢ ⎥
⎣ ⎦.
Analogamente, si definisce strain (deformazione) lo spostamento per unità di lunghezza delle particelle del volume; la deformazione è, ovviamente, adimensionale.
1
Si considera che le forze in gioco siano sufficientemente piccole da rendere lineare la relazione fra tensione e deformazione; tale relazione è definita come legge di Hooke e si esprime in due modi [2]:
ij cijkl Skl
τ = ⋅
kl ijkl ij
S =s ⋅ τ
Dove τij è il tensore di stress, mentre è il tensore di deformazione. La tensione e la deformazione sono tensori di ordine 2, mentre i coefficienti di proporzionalità e si chiamano, rispettivamente, rigidezza ed elasticità e sono tensori di ordine 4.
kl S ijkl c ijkl s
Dato che il tensore di stress τij e di deformazione sono simmetrici, non tutte le
costanti e sono indipendenti.
kl
S
ijkl
c sijkl
I tensori sopra citati vengono di solito espressi come vettori a 6 dimensioni; in questo modo, la rigidezza e l’elasticità diventano matrici 6X6 di ordine 2. Questa operazione prende il nome di notazione ridotta.
Per materiali cristallini cubici, come il silicio, si ha:
11 12 12 12 11 12 12 12 11 44 44 44 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 xx xx yy yy zz zz yz yz xz xz xy xy S c c c S c c c S c c c S c S c S c τ τ τ τ τ τ ⎛ ⎞ ⎛ ⎞ ⎛ ⎜ ⎟ ⎜ ⎟ ⎜ ⎜ ⎟ ⎜ ⎟ ⎜ ⎜ ⎟ ⎜ ⎟ ⎜ = ⋅ ⎜ ⎟ ⎜ ⎟ ⎜ ⎜ ⎟ ⎜ ⎟ ⎜ ⎜ ⎟ ⎜ ⎟ ⎜ ⎜ ⎟ ⎜⎜ ⎟⎟ ⎜ ⎜ ⎟ ⎝ ⎠ ⎜ ⎝ ⎠ ⎝ ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎟ ⎠ Dove τyz =τzy, τxz =τzx, τxy =τyx [8].
I coefficienti formano la matrice delle rigidezze del materiale; le rigidezze del silicio con orientazione cristallina (100) assumono i seguenti valori [3]:
ij
9 11 2 N 166 10 m c = ⋅ ⎡ ⎢⎣ ⎦⎤⎥ ; 12 9 2 N 64 10 m c = ⋅ ⎡⎢ ⎤⎥ ⎣ ⎦; 9 44 2 N 80 10 m c = ⋅ ⎡⎢ ⎤⎥ ⎣ ⎦
Nel caso di materiale isotropo o finemente policristallino (ad esempio, la lega Si-Ge, introdotta in questo capitolo e discussa più approfonditamente nel capitolo 2), si ha
una relazione aggiuntiva: 11 12
44
2
c c
c = − . In questo caso, la matrice delle rigidezze
(così come quella delle elasticità) contiene 2 variabili indipendenti, anziché 3.
1.2.2 La piezoresistività
La piezoresistività è un fenomeno che provoca la variazione della resistività di un materiale sottoposto a deformazione: l’applicazione di uno stress ad una superficie modifica, infatti, la concentrazione e la mobilità locale dei portatori di carica nel volume e questo si traduce in una variazione di conducibilità e, quindi, di resistività. Sia
A l
R0 = ρ il valore a riposo (in assenza di sollecitazioni meccaniche) della resistenza di una struttura con resistività ρ, lunghezza l e sezione costante A. Sia
0
R R
∆
la variazione relativa di resistenza che interessa la struttura, in seguito ad una sollecitazione meccanica. Tale quantità può essere espressa come [2]:
V V l l R R = ∆ + ∆ −∆ ∆ 2 0 ρ ρ
Si suppone di applicare forze piccole, che non siano in grado di modificare la lunghezza ed il volume del resistore, pertanto la relazione diventa:
ρ ρ ∆ ≅ ∆ 0 R R
La rilevazione piezoresistiva, di solito, consiste nell’integrare uno o più resistori in punti chiave della struttura che subisce sollecitazione meccanica: si applica corrente ai resistori e si misura la tensione ai loro capi (o viceversa); se si compie questa operazione prima e dopo l’applicazione dell’ingresso meccanico, si può ricavare la variazione di resistenza che interessa tali resistori: questa quantità è legata alla variazione di resistività e, per il fenomeno della piezoresistività, agli stress ed alla sollecitazione meccanica.
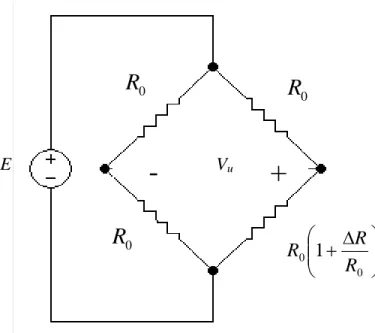
I resistori integrati con comportamento piezoresistivo sono detti anche estensimetri [8]; di solito vengono inseriti in ponti di Wheatstone, perché in questo modo si ottiene, in uscita, un segnale proporzionale a R∆ , almeno in prima approssimazione. Si riporta, a questo scopo, lo schema circuitale di un ponte di Wheatstone, contenente un estensimetro e tre resistenze che non subiscono deformazione e servono solo per estrarre R∆ . 0
R
0R
+
-E Vu 0R
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ∆ 0 0 1 R R RSi noti l’estensimetro, il cui valore R0 a riposo si trasforma in ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∆ + 0 0 1 R R R , in presenza di deformazione.
Sia E la tensione di polarizzazione del circuito e Vu il segnale di uscita (figura 1.2).
Dall’analisi circuitale si ottiene:
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ +∆ ∆ = 0 0 2 2 R R R R E Vu
Si suppone che i valori delle deformazioni siano sufficientemente piccoli, da rendere lineare la suddetta relazione, che diventa:
0
4 R
R E Vu ≅ ∆
Molti materiali manifestano comportamenti piezoresistivi, ma è stato osservato che il fenomeno è particolarmente rilevante in alcuni semiconduttori, come il silicio, il germanio e la lega silicio-germanio (Si-Ge).
Il silicio monocristallino possiede un’elevata piezoresistività che, unita ad eccellenti proprietà elettriche e meccaniche, lo rende ideale per valutare deformazioni e tensioni con una misura di tipo elettrico. Per cristalli anisotropi tridimensionali, la relazione fra il vettore del campo elettrico e la densità di corrente applicata nelle 3 direzioni del sistema cartesiano ortogonale (x,y,z) è la seguente:
(1.2) 1 6 5 6 2 4 5 4 3 x x y z z j j j ε ρ ρ ρ ε ρ ρ ρ ε ρ ρ ρ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎜ ⎟ ⎜= ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ y ⋅
Per materiali come il silicio, che possiede un reticolo cristallino cubico, ρ1, ρ2 e ρ3 definiscono la dipendenza fra il campo elettrico lungo una direzione e la corrente nella stessa direzione. ρ4, ρ5 e ρ6, invece, mettono in relazione il campo con le
correnti perpendicolari ad esso; in particolare, si ha che ρ1=ρ2 =ρ3. In assenza di stress, i termini ρ4, ρ5 e ρ6 sono nulli, quindi la (1.2) diventa [2]:
(1.3) 0 0 0 0 0 0 x x y z z j j j ε ρ ε ρ ε ρ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎜ ⎟ ⎜= ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ y ⋅
Se il materiale è sottoposto a stress, la matrice delle resistività si modifica in questo modo: (1.4) 1 6 5 6 2 4 5 4 3 x x y y z z j j j ε ρ ρ ρ ρ ε ρ ρ ρ ρ ε ρ ρ ρ ρ + ∆ ∆ ∆ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎜ ⎟ ⎜= ∆ + ∆ ∆ ⎟ ⎜ ⎟⋅ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ∆ ∆ + ∆ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Ciascuna componente del campo elettrico contiene 4 termini, il primo dei quali è legato alla resistenza a riposo (in assenza di sollecitazioni meccaniche) della struttura, mentre i rimanenti indicano la variazione di resistenza, dovuta al fenomeno piezoresistivo.
Le variazioni di resistività ∆ contengono l’informazione che ci serve per risalire ρi allo stress, perché sono legate al vettore delle tensioni, attraverso la matrice dei coefficienti di piezoresistività:
1 11 12 12 2 12 11 12 3 12 12 11 4 44 5 44 6 44 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 xx yy zz yz xz xy τ ρ π π π τ ρ π π π τ ρ π π π τ ρ π ρ τ ρ π τ ρ π ∆ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎜ ⎟ ⎜∆ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜∆ ⎟ ⎜ ⎟ = ⋅⎜ ⎜∆ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜∆ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜⎜ ⎟⎟ ⎜∆ ⎟ ⎝ ⎠ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎟
I coefficienti di piezoresistività sono stati misurati per la prima volta da Smith, nel 1953 [4]; riportiamo i risultati ottenuti nella tabella sottostante:
11 π [Pa-1 ] π [Pa12 -1 ] π [Pa44 -1 ] Silicio di tipo p 11 10 6 . 6 ⋅ − −1.1⋅10−11 138.1⋅10−11 Silicio di tipo n 11 10 2 . 102 ⋅ − − 11 10 4 . 53 ⋅ − 11 10 6 . 13 ⋅ − −
TABELLA 1.1: Valori sperimentali, misurati a temperatura ambiente, dei coefficienti di piezoresistività del silicio monocristallino orientato parallelamente al piano (100) [3], [4].
Si consideri un resistore di materiale monocristallino, la cui di resistenza a riposo è
R0; si supponga che vi scorra una corrente I (diretta lungo l’asse z) e che cada una
tensione V ai suoi capi. Se il solido subisce una deformazione e si misura il nuovo valore R di resistenza, si ottiene la seguente relazione:
z z j I V R R R= 0 +∆ = ∝ε dove
3 4 5 ρ ρ ρ ρ ε ∆ + ∆ + ∆ + = z y z x z z j j j j j (1.5)
Dalla (1.5) risulta evidente che: 3 4 5 ρ ρ ρ +∆ +∆ ∆ ∝ ∆ z y z x j j j j R (1.6)
La struttura cristallina di un dispositivo può assumere diverse orientazioni, che dipendono dal processo di fabbricazione del dispositivo stesso; ad esempio, la superficie di un wafer di silicio è in genere un piano (100). Se si cambia l’orientazione cristallina di un materiale, si modifica anche il suo comportamento piezoresistivo; la variazione relativa di resistenza può essere infatti scomposta in due componenti, di cui una parallela ed una perpendicolare alla direzione del flusso di corrente [2], [3]: t t p p R R =τ π +τ π ∆ , dove: p
τ Componente della tensione parallela alla direzione i cui fluisce la corrente applicata.
t
τ Componente trasversale della stessa grandezza
p
π Coefficiente parallelo di piezoresistività
t
π Coefficiente perpendicolare di piezoresistività
I coefficienti parallelo e perpendicolare dipendono dai coefficienti della matrice di piezoresistività e dall’orientazione cristallina del materiale; pertanto, a diverse direzioni degli assi cristallografici di un piezoresistore è associata una diversa R∆ .
Esiste anche una dipendenza dal drogaggio e dalla temperatura, di cui però non ci occuperemo in questa tesi.
1.3 Sensori piezoresistivi
Esistono due tipi principali di sensori piezoresistivi: strutture a membrana (tipicamente sensori di pressione e flusso) e strutture sospese (sensori di stress e di accelerazione).
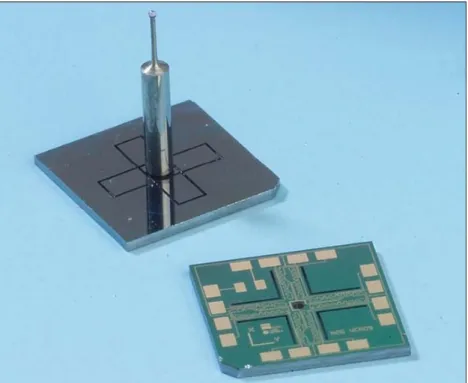
Sono di seguito riportate le immagini relative a due esempi di sensori, il primo dei quali è un sensore tattile triassiale di forza [5], mentre il secondo è un accelerometro a struttura sospesa, compatibile con il processo CMOS [6].
La figura 1.5 riporta una foto del sensore tattile, formato da una punta (probing pin) contigua ad una struttura flessibile a croce, formata da 4 barre rigide in silicio monocristallino, collegate ai bordi con delle membrane che funzionano da cardini.
Se una forza agisce alla punta, la croce si flette come in figura 1.6, dove sono illustrati due tipi di forza applicata: parallela ad uno dei bracci della croce e perpendicolare alla struttura del sensore.
FIGURA 1.6: Deformazione della struttura flessibile
Ciascun cardine contiene quattro resistori integrati, collegati a ponte di Wheatstone: tali resistori servono per estrarre l’uscita, che ne collega la variazione di resistenza alla forza applicata alla punta.
FIGURA 1.7: Cardini di un semibraccio della croce, con piezoresistori integrati.
La successiva immagine riporta il secondo esempio di sensore piezoresistivo: un accelerometro compatibile con la tecnologia CMOS, formato da un piatto ancorato ad un sistema fisso, tramite quattro molle flessibili.
FIGURA 1.8: Accelerometro piezoresistivo; rappresentazione modale delle prime tre frequenze di risonanza della struttura sospesa.
Ciascuna molla del sensore contiene due resistori integrati, per il rilevamento della
R
∆ ; la seguente figura mostra una sezione laterale dell’accelerometro:
FIGURA 1.9: Sezione laterale del dispositivo; sono evidenziati in grigio i resistori, che saranno poi collegati a ponte di Wheatstone.



![TABELLA 1.1: Valori sperimentali, misurati a temperatura ambiente, dei coefficienti di piezoresistività del silicio monocristallino orientato parallelamente al piano (100) [3], [4]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7251908.80851/11.918.325.695.126.310/tabella-sperimentali-temperatura-coefficienti-piezoresistività-monocristallino-orientato-parallelamente.webp)