Capitolo 2
Ricerca e Acquisto del Ricevitore GPS
I ricevitori GPS possono essere utilizzati in due ambiti diversi: civili e militari. Il primo richiede una precisione dell’ordine della decina di metri; il secondo, invece, un’accuratezza molto maggiore dell’ordine dei centimetri. In questa trattazione descriveremo un generico ricevitore GPS per utenti civili (SPS), il cui schema a blocchi è riportato in Fig 2.1 (a).
Fig. 2. 1 - (a) Schema di principio di un generico ricevitore GPS per uso civile (SPS);
(b) Schema a blocchi di un generico canale, elaborato dal DSP
2.1. Struttura di un ricevitore GPS
Passiamo, ora, in rassegna i singoli blocchi di Fig. 2.1 descrivendone in breve le caratteristiche generali. Tipicamente, l’antenna usata per ricevitori SPS ha una polarizzazione circolare di tipo destrogiro (RHCP), con un diagramma di irradiazione quasi semisferico, che consente un angolo di apertura di circa 160°, con un guadagno massimo (2.5 dBi) in corrispondenza dello zenit: tali requisiti possono essere ottenuti
con antenne a microstriscia.
Questi segnali (RF) sono amplificati da un preamplificatore a basso rumore, un Low Noise Amplifier (LNA), che aumenta la potenza del segnale ricevuto. Tra l’antenna a il preamplificatore potrà poi esserci un filtro passivo passa banda per minimizzare le interferenze a RF fuori banda (è tipicamente un filtro con una frequenza centrale di 1575.42 MHz ed una banda di 20 MHz).
Nella configurazione senza filtro, l’amplificatore è il primo componente dopo l’antenna. In questo caso, la cifra di rumore complessiva dell’intero stadio RF / IF del ricevitore è bassa ed è circa uguale a quella del solo LNA. Tuttavia il problema che può sorgere con questa configurazione è che segnali robusti possono portare l’amplificatore in saturazione e generando così frequenze spurie.
L’altra configurazione prevede il filtro passa banda come primo componente dopo l’antenna. Solitamente la perdita di inserzione di questo filtro è relativamente alta, circa 2-3 dB. La cifra di rumore del ricevitore risulterà circa 2-3 dB più grande rispetto alla configurazione senza filtro. Per questi motivi, di solito, quando non vi sono particolari problemi di interferenza che richiedono un filtraggio, si preferisce la configurazione senza filtro ed una cifra di rumore bassa.
I segnali, amplificati e condizionati, sono poi convertiti a frequenza intermedia (IF). Tale conversione è svolta tipicamente in due stadi, ma non mancano casi ad uno stadio ed anche campionamenti direttamente in banda L. Questo ultimo caso presenta molti vantaggi; in questa configurazione non sono necessari, infatti, il mixer e l’oscillatore locale. Un mixer è un dispositivo non lineare, sebbene nello schema del ricevitore si ricorra spesso al modello linearizzato. Esso produce di solito frequenze spurie (indesiderate) che possono disturbare il segnale in fase processing.
Lo svantaggio maggiore del campionamento diretto è che gli amplificatori usati in questo approccio devono operare ad alte frequenze e risultano pertanto molto costosi. Inoltre non è facile implementare filtri a banda stretta ad alte frequenze e comunque questo tipo di filtri hanno perdite di inserzione relativamente alte.
Nell’approccio con conversione di frequenza, la frequenza intermedia risulta molto più bassa di quella di ingresso e questo facilita l’operazione di filtraggio. Tutto ciò si traduce in una minore perdita per inserzione ed un costo inferiore degli amplificatori. Per contro, come già detto, ci sono degli inconvenienti legati all’utilizzo di mixer ed oscillatori locali.
Nel blocco dell’oscillatore di riferimento c’è un quarzo il quale genera una oscillazione ad una data frequenza e subito in cascata è presente il sintetizzatore, di solito costituito da un banco di PLL, che ci forniscono le frequenze desiderate. In particolare genera le frequenze locali che permettono le down-conversion RF / IF e IF / IF (nel caso che sia ad uno stadio o a due stadi). Inoltre fornisce la frequenza per il campionamento analogico-digitale, e quella per gli stadi di Digital Signal
Processing (DSP).
Tipicamente a frequenze intermedie vengono svolti sia il processo di conversione analogico-digitale (A/D), sia le funzioni di controllo automatico di guadagno (AGC)1 per stabilizzare l’ampiezza del segnale evitando di mandare in saturazione gli stadi successivi.
Lo stadio successivo del ricevitore è costituito dalla conversione digitale in banda base del segnale ricevuto; a questo punto, tramite un algoritmo per la “predizione dei satelliti in visibilità”, che sfrutta le informazioni contenute negli almanacchi2, vengono generati a livello locale i codici PRN associati a ciascun satelliti ricevuti per realizzare successivamente il despreading.
Effettuando una misura della correlazione tra il segnale complessivo ed il codice locale, il ricevitore è in grado di separare i vari canali, corrispondenti ai diversi satelliti, dando luogo ad una prima fase di acquisizione rozza, cui seguirà una
1
Automatic Gain Control per non complicare lo schema a blocchi non è stato inserito comunque va posizionato sopra al blocco della conversione RF / IF e conversione A/D.
2
fase di tracking del segnale dove vengono recuperati fase, frequenza e timing. Cerchiamo di spiegare meglio come si implementano tali operazioni.
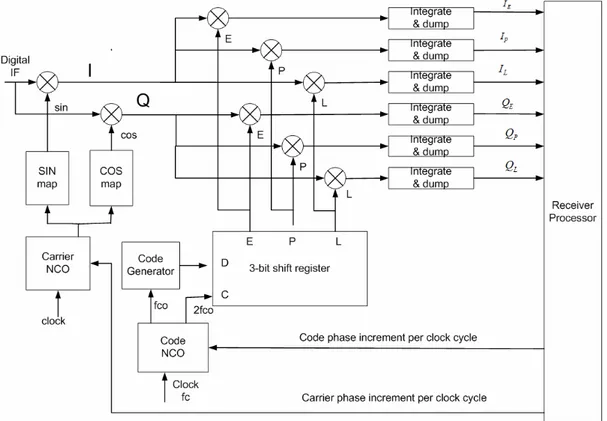
La Fig 2.2 illustra un tipico diagramma a blocchi di uno degli N canali del ricevitore a cui è applicato il segnale a frequenza intermedia. Ogni canale contiene circuiti retroazionati di tracking del codice e della portante in modo da eseguire misure di codice e di fase della portante come pure la demodulazione dei dati del messaggio di navigazione.
Fig. 2. 2 – Diagramma a blocchi di un canale del ricevitore GPS
Come si può notare dalla Fig 2.2 il segnale digitale a frequenza intermedia viene convertito in banda base e vengono generati i due segnali uno in fase (I) e uno in quadratura (Q).
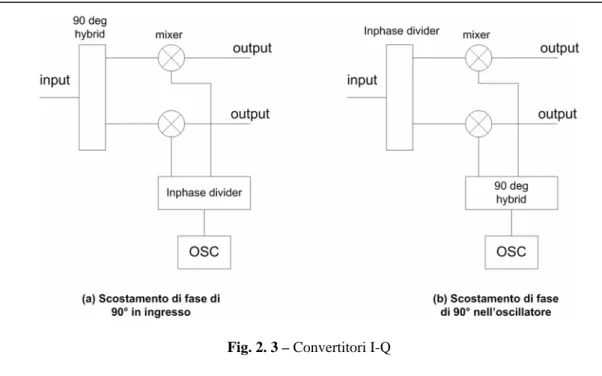
Ci sono due modi per implementare un convertitore I-Q come mostrato nella Fig 2.3
Fig. 2. 3 – Convertitori I-Q
Nel primo caso, viene introdotto uno scostamento di fase di 90° nel circuito di ingresso. Nel secondo caso, lo stesso scostamento è introdotto nel circuito dell’oscillatore. Entrambi gli approcci sono di uso comune.
Lo schema a blocchi in Fig. 2.2 è il solito sia nella fase di acquisizione che di tracking e differiscono solo per la gestione. Infatti nella fase di acquisizione abbiamo una unità logica che comanda i due NCO3 e gli fornisce quale frequenza e quale ritardo del codice utilizzare per tentare di acquisire il segnale.
Una volta che questa unità logica ha fornito le grandezze sopra citate il segnale a frequenza IF digitale viene portato in banda base con la conseguente generazione del segnale in fase (I) e in quadratura (Q), dopo il segnale entra nel blocco dei correlatori dove viene fatta l’operazione di despreading4.
Viene quindi realizzata la correlazione tra i segnali I e Q e tre repliche del codice C/A generate localmente: la prima replica (Prompt) è allineata con il segnale, la seconda (Late) è ritardata e la terza (Early) è anticipata. Dopo tale operazione si passa all’integrazione dei segnali sui vari rami e successivamente si controlla quale
3
NCO è un oscillatore controllato numericamente.
4
Il de-spreading è l’operazione che ci permette di avere in un canale solo l’informazione riferita ad un satellite e si realizza facendo la correlazione tra il messaggio del GPS e il codice PRN di un satellite generato al livello locale nel ricevitore.
valore5 di correlazione supera una certa soglia. Se si ha il superamento di tale soglia vuol dire che la frequenza e il ritardo temporale del codice, forniti dall’unità logica, erano giusti e, quindi, si passa alla fase di tracking dove verranno recuperati in maniera precisa frequenza e fase della portante e ritardo temporale del codice. Se la soglia non è superata, l’unità logica fornisce una nuova frequenza e un nuovo ritardo temporale ai due NCO e vengono ripetuti gli step di acquisizione sopra introdotti.
L’architettura del canale GPS in fase di acquisizione e di tracking, è sostanzialmente la stessa (Fig. 2.2) con la sola differenza nella fase di tracking vengono attivati gli anelli di recupero dei sincronismi, in particolare: il PLL per il recupero della fase, FLL6 per il recupero della frequenza e DLL7 per il recupero del timing del codice. Tali dispositivi non possono essere utilizzati durante la fase di acquisizione perché sono configurati per il recupero dei tipicamente in un range di valori molto minore di quello reale. Per cui lo stadio di acquisizione permette una stima “rozza” di fase, frequenza e timing che verrà successivamente raffinata durante la fase di tracking tramite l’uso di tali anelli.
Una volta che il ricevitore si è sincronizzato con i dati di ciascun satellite, scatta la fase di Navigazione ( Fig 2.1(b) ) nella quale vengono processati tutti i dati contenuti nei subframe GPS. Infine tramite la Man-Machine Interface (MMI) la posizione del ricevitore è fornita all’utente.
2.1.1. Effetto Doppler
Quando abbiamo parlato della conversione in banda base del segnale a IF, non abbiamo fatto cenno agli scostamenti di frequenza introdotti dall’effetto Doppler.
Il Doppler Shift è causato dal moto relativo tra satellite e ricevitore e condiziona in maniera significativa l’elaborazione dei segnali.
5
Come si può vedere dalla Fig 2.2 non è che si confrontano con la soglia i sei segnali che arrivano al blocco chiamato “Receiver processor”, ma in realtà sono tre i segnali che vengono confrontati con la soglia e non sono altro che la norma dei segnali; late, prompt e early.
6
Per nozioni sul funzionamento del PLL e del FLL vedi [19].
7
Con riferimento alla Fig. 2.4 è illustrata la situazione cui ci troviamo di fronte:, supponiamo che il satellite si trovi nel punto S e l’utente sia collocato in U. Lo spostamento di frequenza per effetto Doppler è dovuto alla proiezione della velocità del satellite v sulla congiungente utente-satellite, vale a dire s v , che può d
essere ricavata dalla relazione
sin d s
v = v ⋅ β (2.1)
Fig. 2. 4 – Spostamento di frequenza per effetto Doppler
Una volta calcolata la velocità Doppler v , è necessario valutare lo d
spostamento di frequenza dovuto a tale effetto: questa operazione può essere eseguita mediante la relazione 1 L d d f v f c ⋅ = (2.2),
dove f è la frequenza della portanze L1, collocata a 1575.42 MHz, mentre L1
8 2.99792459 10 m/sec
c= ⋅ (WGS-84) è la velocità della luce. È importante notare che, applicando il valore di
max
d
v alla (2.2), il massimo spostamento Doppler per un ricevitore a bassa velocità non supera in modulo 4.9 kHz. Pertanto, si può considerare come massimo range di frequenza, in caso di
ricevitori montati su veicoli che si muovono a basse velocità (tipicamente con accelerazioni minori di 1 g), l’intervallo di guardia che va da -6 KHz a +6 KHz. Se il ricevitore GPS è montato su un veicolo che si sposta ad alta velocità (con accelerazione superiore a 1 g), subentra anche il moto del ricevitore, ed è ragionevole assumere uno scostamento Doppler massimo di ±12 KHz (in caso di particolari applicazioni in ambito militari).
Per una trattazione più dettagliata sul calcolo del Doppler shift e sulle varie
cause che lo generano si veda [21].
Uno degli obbiettivi prefissati in tale lavoro di tesi è l’acquisto di un ricevitore GPS che abbia requisiti di configurabilità e permetta di esaminare i “Raw Data”, ovvero i dati trasmessi dal satellite. Per tali ragioni è anche necessario un programma di interfaccia per convertire i raw data nel formato richiesto dalle librerie per il positioning realizzate in laboratorio.
Le specifiche che doveva soddisfare il ricevitore erano: - Costo non superiore ai 2000.00 €.
- Presenza di una uscita dei raw data.
Logicamente in aggiunta il ricevitore doveva essere un buon ricevitore, ovvero l’accuratezza, con la quale viene calcolata la posizione, deve essere minore di 30 m (senza SA8).
I Raw Data o anche chiamati “Dati Rozzi” non sono altro che i dati trasmessi
da un satellite, prima di essere elaborati per calcolare la posizione dell’utente.
Dalle prime ricerche sui ricevitori da laboratorio (ad alte performance) esistenti in commercio si è evidenziato quasi subito un problema di budget, per cui il costo di un dispositivo completamente configurabile, a buone prestazioni e che permettesse di accedere ai dati del satellite superava i 2000.00 €. Quindi si è deciso
8
Vedi Cap.1, Par 1.2
di ridurre le pretese cercando tra i ricevitori standard, qualcosa che si avvicinasse ai requisiti fissati.
La prima cosa che si è notata è che i ricevitori GPS che si trovano in commercio ad un costo accessibile utilizzano come formato di uscita il protocollo NMEA (National Marine Electronics Association)9. Lo standard NMEA è il protocollo normalmente adottato dalle maggiori case costruttrici per le varie applicazioni civili. Purtroppo, per il nostro scopo, tale protocollo non è adatto in quanto ci fornisce i dati già elaborati come la latitudine, longitudine, altitudine, tempo e non potendo così risalire all’informazioni fornite dal satellite.
Fortunatamente il protocollo NMEA non è l’unico formato di uscita esistente, infatti ce ne sono altri che pur elaborando il messaggio GPS permettono di ricavare sia i raw data sia i dati elaborati, e quindi conoscere la posizione dell’utente. Di solito tali protocolli non sono standard ma vengono creati dalle case costruttrici dei ricevitori e, quindi, ne esistono molti e tutti diversi l’uno dall’altro, come: SiRF Binary Protocol, TSIP,TAIP10 e NavCom Binary.
In questo modo si è potuto aggirare il problema del costo semplicemente traslando la ricerca sui ricevitori più commerciali a buone prestazioni con la possibilità di configurare il protocollo di uscita dati.
2.2.1. Rassegna dei ricevitori GPS soddisfacenti i requisiti
Dopo aver capito come cercare il ricevitore e con quali caratteristiche, è iniziata la ricerca su Internet sfruttando un sito dall’indirizzo [23] e dal nome “GPS Receiver Manufacturers, System Integrators, Equipment Suppliers, and Service Providers”. Questo sito è stato molto utile perché raggruppava gli indirizzi dei siti
9
NMEA è un protocollo che ci fornisce la posizione dell’utente, la velocità, l’accelerazione ed altri parametri che possono essere di uso comune per un utente civile. Quindi non è altro che un modo per codificare i raw data solo dopo essere stati elaborati per calcolare i parametri necessari ad un sistema di posizionamento. Per una trattazione più dettagliata del protocollo NMEA vedi [ 22]
10
SiRF (Silicon Radio Frequency), TSIP (Trimble Standard Interface Protocol ), TAIP (Trimble Ascii
delle maggiori case costruttrici dei ricevitori, ma anche quelli di società o negozi che trattano articoli per sistemi satellitari di posizionamento.
Tutti i ricevitori GPS che soddisfacevano i requisiti sono stati raggruppati in una tabella nella quale sono state riassunte le principale caratteristiche in base alle quali è stato possibile effettuare una scelta. Come è possibile notare dalla Tab. 2.1 (a) e (b) le voci che sono state prese in considerazione sono le seguenti:
- Model. Modello del ricevitore.
- Channels. Indica il numero dei canali ovvero il numero di segnali GPS che
possono essere elaborati in parallelo. Inoltre in questo campo possiamo trovare le seguenti sigle: GLONASS (GLObal NAvigation Satellite System)11.
SBAS (Satellite Based Augmentation System)12. - Output Protocol. Indica il protocollo di uscita utilizzato dal ricevitore.
- Accuracy. Indica la precisione con la quale viene calcolata la posizione,
infatti il valore scritto in quel campo ci sta ad indicare il raggio del cerchio entro il quale giace il 50% delle misurazioni (indicato anche con l’acronimo CEP Circular Error Probable). Inoltre in questo campo possiamo trovare le
seguenti sigle: RMS (Root Mean Square) Errore Quadratico Medio
DGPS (Differential Global Position System)13
SA (Selective Availability) si veda Cap.1, Par 1.2
WAAS (Wide Area Augmentation System)14
- Software. Indica se esiste un software che permette all’utente di dialogare
con il ricevitore GPS.
- Country. Indica il sito o la nazione dove è possibile acquistare il ricevitore.
- Price. Costo del ricevitore.
11
Il GLONASS è il sistema di navigazione satellitare russo
12
In SBAS fanno parte WAAS (Wide Area Augmentation System), EGNOS (European Geostationary
Navigation Overlay Service), MSAS (MTSAT Satellite-based Augmentation System) dove MTSAT
(Multifunction Transport SATellite)
13
Il DGPS funziona come un GPS normale solamente viene introdotta una correzione (differential
correction) che fa aumentare la precisione con cui è calcolata la posizione.
14
Il WAAS è un sistema di satelliti geostazionari che invia dei parametri correttivi al ricevitore GPS per migliorare il calcolo della posizione.
Model Channels Output Protocol
Accuracy Software Country Price
TF30 CF Laipac Compact Flash card 12 Channel L1 NMEA 0183 v2.2 SiRF Binary 25 m CEP without SA Vedi Datasheet Spagna (sito Laipac) 135 € Trimble Marine DSM 12/212 12 Channel L1 NMEA 0183 v2.2 TSIP
Less than 1 meter horizontal DGPS RMS Compatibile con Windows Rivenditori in italia Non Disponibile SiRFstarIIeLP EVK Product Insert 12 Channel L1 NMEA 0183 SiRF Binary <10m CEP <5m WAAS Vedi Datasheet Europa Circa 1000 € GPS 9531/32/33/34 leadtek 12 Channel L1 NMEA 0183 v2.2 SiRF Binary 10 m CEP without SA Non Disponibile Germania Olanda Non Disponibile GG-RTK Ashtech 12 Ch L1 12 Ch L1Glonass NMEA 0183 Raw data 3,2 m DGPS Non Disponibile Non Disponibile Non Disponibile
GG24 Thales 12 Ch L1Glonass 12 Ch L1 NMEA 0183 Raw data 3,2 m DGPS Non
Disponibile Non Disponibile Non Disponibile G12E-RTK Thales 12 Channel L1 NMEA 0183 Raw data 3,0m DGPS Non Disponibile Non Disponibile Non Disponibile DG16, (Thales) DG14 Sensors 12 Ch L1 2 Ch Waas, Egnos e Msas NMEA 0183 Raw data 3,0m DGPS Non Disponibile Non Disponibile Non Disponibile
ADU5 Thales 56 GPS code and carrier channels. NMEA 0183 Raw data 3,0m DGPS Non
Disponibile Non Disponibile Non Disponibile DS PolaRx2 Septentrio 12 Ch. L1 12 Ch. L2 3 Ch. SBAS NMEA 0183 Raw data 0,15m DGPS Non Disponibile Non Disponibile Non Disponibile DS PolaRx2@ Septentrio 12 Ch L1 12 Ch L2 3 Ch SBAS NMEA 0183 Raw data 0,15m DGPS Non Disponibile Non Disponibile Non Disponibile GPS Pathfinder Pocket (Trimble) 8 Channel L1/CA code continuous tracking NMEA 0183 TSIP 2-5 m DGPS 10 m CEP Vedi Datasheet Rivenditore in italia www.geostudiogis.it 500 € SysOn GPS CF Plus II (SDG System) 12 Channel L1 parallel satellite tracking NMEA 0183 SiRF Binary N.D. Vedi Datasheet
Vedere sito della SDG system Circa 200 € BT-308 Bluetooth GPS (Navilock) 12 Channel L1 parallel processing NMEA 0183 SiRF Binary 15m without SA, 10m WAAS CEP Vedi Datasheet Acquisto on-line ww.chipstation.it 165 € (i.v.a esclusa) U2 12 Channel L1 NMEA 0183 SiRF Binary H 25m (SA off), V 40m (SA off), Non Disponibile Non Disponibile Non Disponibile MEII 12 Channel L1 NMEA 0183 SiRF Binary H 25m (SA off), V 40m (SA off), Non Disponibile Non Disponibile Non Disponibile CRUXII / BTGPS™ (EMTAC) 12 Channel L1 all-in-view tracking NMEA 0183 SiRF Binary 10 meters RMS, 25 meter CEP, without SA Non Disponibile Non Disponibile Non Disponibile
Tab. 2. 1 (b) – Rassegna dei ricevitori GPS soddisfacenti le specifiche
Tra tutti i ricevitori che soddisfano le specifiche ne sono stati selezionati due che sembravano più adatti ai nostri scopi (sono riportati nella Tab. 2.2).
Model Channels Output Protocol
Accuracy Software Country Price
GPS Pathfinder Pocket (Trimble) 8 Channel L1/CA code continuous tracking NMEA 0183 TSIP 2-5 m DGPS 10 m CEP Vedi Datasheet Rivenditore in italia 500 € FALCOM JP7 Evaluation Kit 12 Channel L1 NMEA 0183 SiRF Binary 10 m CEP without SA Vedi Datasheet Germania o www.azzurri.com 458 €
Tab. 2. 2 – Ricevitori GPS selezionati
Come si può notare dalla Tab. 2.2 i due ricevitori sono molto simili come prestazioni, le uniche cose che differiscono sono, il protocollo alternativo al NMEA e il numero di satelliti che possono essere mandati in tracking. Quest’ultima differenza non è rilevante perché mediamente alla nostra latitudine e longitudine si riesce ad avere un massimo di 7-8 satelliti in visibilità e quindi, anche, 8 canali sono
Model Channels Output
Protocol Accuracy Software Country Price
FALCOM JP3 Evaluation Kit 12 Channel L1 NMEA 0183 SiRF Binary 10 m CEP without SA Vedi Datasheet Germania www.gecomtel .com 700 € FALCOM JP4 Evaluation Kit 12 Channel L1 NMEA 0183 SiRF Binary 10 m CEP without SA Vedi Datasheet Germania Non Disponibile FALCOM JP5 Evaluation Kit 12 Channel L1 NMEA 0183 SiRF Binary 10 m CEP without SA Vedi Datasheet Germania Non Disponibile FALCOM JP7 Evaluation Kit 12 Channel L1 NMEA 0183 SiRF Binary 10 m CEP without SA Vedi Datasheet Germania o www.azzurri.com 458 € Compact GPSTM Card (Pretec) 12 Channel L1 NMEA 0183 SiRF Binary Non Disponibile Non Disponibile Acquisto on-line (navcity.co.uk) Circa 200 €
sufficienti. Di seguito vengono riportati i datasheet dei due ricevitori GPS e rimandiamo al paragrafo successivo la scelta del ricevitore.
Datasheet:
- GPS Pathfinder Pocket (Trimble) in Fig. 2.5 (a) e (b).
2.2.2. Scelta Finale
Il ricevitore GPS che è stato scelto tra i due selezionati è il GPS Pathfinder Pocket, prodotto dalla Trimble e raffigurato in Fig. 2.7 .
Fig. 2. 7 – GPS Pathfinder Pocket (Trimble)
Il ricevitore della Trimble è stato preferito a quello della Falcom, non perché le prestazioni del primo erano migliori del secondo, ma solo per comodità e praticità. Infatti le prestazioni dei due ricevitori sono molto simili, solamente che, come si può notare dalla Fig. 2.6 (b), il ricevitore della Falcom è un kit da laboratorio e, quindi, indicato per misurazioni indoor ma non per misurazioni outdoor in quanto mancava un involucro che contenesse tutte le sue parti e lo rendesse impermeabile. Al contrario il ricevitore della Trimble è indicato sia per misurazioni indoor sia per misurazioni outdoor, infatti, come si nota dalla Fig 2.7, il GPS Pathfinder Pocket è
molto piccolo e comodo da trasportare basti pensare che può entrare in una tasca di un normale pantalone ed è anche dotato di batterie al Litio che ci permettono un’autonomia di circa 9-10 ore.
Tale ricevitore, inoltre, è stato scelto per la presenza di un rivenditore nazionale (www.geostudiogis.it) che lo distribuiva, contrariamente al concorrente
della Falcom che pur avendo un rivenditore in ITALIA, andava ordinato e spedito dall’INGHILTERRA. In questo modo si è riuscito a ridurre i tempi di consegna: tra la ricerca e l’arrivo del GPS Pathfinder Pocket sono trascorsi circa due mesi. In
aggiunta a quanto già detto, la GEOSTUDIO ci ha garantito un’assistenza tecnica su territorio nazionale che con il ricevitore della Falcom non era possibile avere.
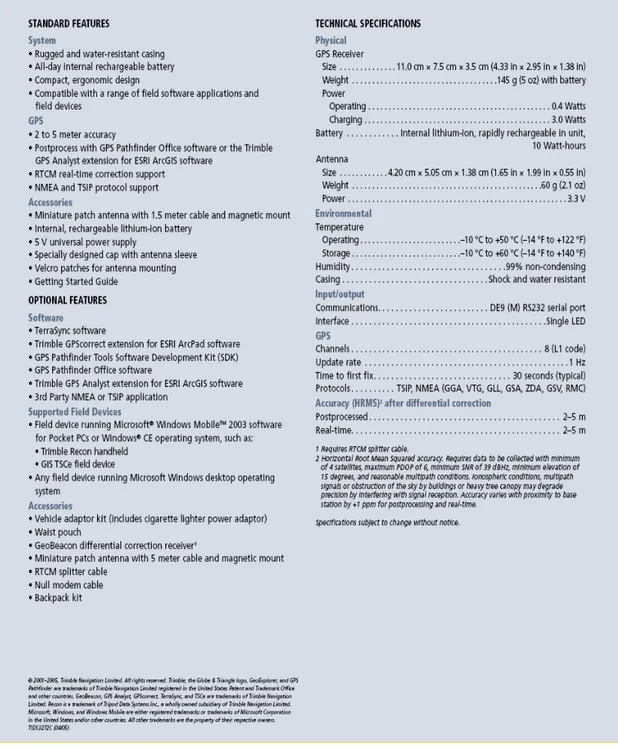
Di seguito (Fig. 2.8) riportiamo i dati tecnici del ricevitore ;
Cerchiamo di spiegare alcune voci delle specifiche tecniche del Pathfinder Pocket (Fig. 2.8 colonna di destra):
-Physical. Vengono riportati i dati fisici come dimensioni, peso e potenza sia per il
ricevitore GPS sia per l’antenna
-Environmental. In questa voce troviamo le condizioni ambientali a cui può
funzionare il ricevitore
-Input/Output. Il Pathfinder Pocket comunica con il PC attraverso una porta seriale
RS232 ed inoltre, sulla parte superiore troviamo un led il quale può assumere alcuni colori per indicare lo stato in cui si trova (vedi Fig. 2.9)
Fig. 2. 9 – Led del ricevitore
-GPS. Il numero di satelliti che possono essere mandati in tracking sono 8, la
frequenza di aggiornamento dei dati è di 1Hz e il ricevitore della Trimble impiega tipicamente 30 sec per calcolare la prima posizione. Cerchiamo di chiarire cosa si intende con la precedente affermazione; cold-start, warm-start e hot-start
rappresentano gli stati nei quali si può trovare il ricevitore all’accensione e condizionano il tempo per il calcolo della prima posizione. Con cold-start indica lo
stato nel quale il ricevitore non possiede gli almanacchi, gli effemeridi, la posizione iniziale o il tempo e impiega circa 150 sec per calcolare la prima posizione. Invece, quando possiede gli almanacchi, la posizione iniziale e il tempo, ma non li effemeridi, ci troviamo nello stato warm-start e ci vogliono circa 45 sec per avere un
risultato dal ricevitore. Infine, se i dati precedentemente elencati sono validi, per avere una posizione basterà attendere circa 20 sec.
Il Pathfinder Pocket può usare sia il protocollo TSIP sia il protocollo
NMEA10 per dialogare con il PC o con qualsiasi altro sistema in grado di ricevere i suoi dati.
- Accuracy. Ci sono diversi modi per misurare l’accuratezza di questo ricevitore:
- Postprocessed (2-5 m). I dati vengono post-elaborati da un particolare
software il quale non fa altro che fornire un parametro correttivo per migliorare il calcolo della posizione.
- Real-Time (2-5 m). Il parametro correttivo viene fornito da delle stazioni di
riferimento della Trimble e il protocollo usato è RTCM SC-10415.
- Autonomous accuracy 16(10 m) (Fig. 2.10). Questa accuratezza è ottenuta facendo lavorare il ricevitore in modalità autonoma ovvero, a meno di operazioni post-processing e senza applicare correzioni differenziali ottenute tramite il DGPS.
Fig. 2. 10 – Altre specifiche tecniche del ricevitore
Le accuratezze riportate sopra sono misurate in una condizione particolare ovvero quando abbiamo un minimo di 4 satelliti in tracking, un massimo PDOP17 di 6, un minimo SNR di 39 dBHz e un minimo angolo di elevazione di 15°. Comunque l’accuratezza del ricevitore, senza considerare una qualsiasi condizione particolare, è
15
Il protocollo RTCM SC-104 non è stato analizzato in quanto è il formato utilizzato dal DGPS.
16
Questa voce è riportata in un altro datasheet dello stesso ricevitore.
17
di 25 m CEP (Circular Error Probability) senza SA; in realtà è il 50% delle posizioni calcolate che cade in una circonferenza di raggio 25 m e centro il vero valore della posizione. Questo dato è stato prelevato dal manuale del Lassen™ LP GPS che è la