Il Progetto SWAN
In questo Capitolo viene fornita una descrizione generale dell’intero progetto SWAN (Sistemi softWare per Applicazioni di Navigazione), all’interno del quale si colloca il presente lavoro di tesi. Il progetto ha l’obiettivo di promuovere lo sviluppo di una nuova generazione di ricevitori GNSS, interamente basati sulla tecnologia SDR (Software Defined Radio), il più possibile flessibili e riconfigurabili.
In particolare, nel paragrafo 1, verrà trattata per intero la struttura del sistema, mentre nei paragrafi successivi saranno descritti uno per uno i moduli che lo compongono. Nello specifico si analizzerà la piattaforma di supporto (paragrafo 2), il modello di base (paragrafo 3), ed infine il tool di monitoraggio e analisi, che rappresenta il cuore di questo lavoro di tesi (paragrafo 4).
2.1 -Overview del Progetto
Il progetto SWAN è un'iniziativa italiana finanziata dall'ASI (Agenzia Spaziale
Italiana) ed è diretto da un team composto da partner appartenenti al mondo sia
accademico che industriale, sotto il coordinamento del CNIT (Comitato Nazionale
Italia. La durata prevista per il progetto è di 16 mesi (Dicembre 2007 – Aprile 2009). Scopo del progetto, come accennato, è quello di promuovere lo sviluppo di una nuova generazione di ricevitori GNSS, interamente basati sulla tecnologia SDR, con il principale obiettivo di essere il più possibile flessibili e riconfigurabili in maniera tale da poter cooperare con segnali provenienti dai principali sistemi satellitari, GPS GALILEO ed EGNOS, recependone le possibili future evoluzioni e riuscendo ad integrarsi con altre tecnologie o eventuali ibridazioni con altri sistemi di posizionamento. Scopo dell’iniziativa è di stimolare inoltre la ricerca e lo sviluppo sperimentale di architetture, algoritmi e moduli software per la realizzazione di ricevitori di navigazione satellitare, fortemente basati su tecnologie particolarmente flessibili e specializzabili in relazione ai requisiti applicativi che devono soddisfare ed alla capacità d’integrarsi con terminali applicativi e di comunicazione.
Il progetto è strutturato secondo due livelli: un livello di simulazione, all'interno del quale viene realizzato un modello di terminale GNSS completamente software, utilizzabile come programma di analisi e verifica per gli algoritmi e i segnali implementati nei sistemi GNSS. In questa parte del progetto, un ruolo fondamentale è svolto da un tool il cui scopo è quello di fornire uno studio dettagliato dei segnali di navigazione, valutandone differenze e potenzialità, il tutto adattabile ai futuri segnali GPS e GALILEO, tuttora in via di sviluppo. Un livello implementativo, nel quale si fa uso delle tecniche SDR per mettere a punto un ricevitore ampiamente flessibile, realizzato tramite dispositivi hardware riconfigurabili. Il principale risultato del livello di implementazione è il Modello di Base, che rappresenta un modello totalmente operativo per un larga serie di terminali di radio-navigazione.
L’elemento chiave che permette ad un apparato ricevitore di essere adatto contemporaneamente a differenti applicazioni di navigazione è la riconfigurabilità, che può essere ottenuta per mezzo della tecnologia SDR.
La finalità di questo progetto è quello di fornire le linee guida fondamentali per il disegno e l’implementazione di ricevitori GNSS multi-standard basati sulla tecnologia SDR.
La disponibilità, di un sempre maggiore numero di costellazioni satellitari, impongono ai ricevitori le seguenti caratteristiche:
• Capacità di gestire più segnali (GPS+GALILEO, GPS+GALILEO+EGNOS, etc)
• Flessibilità e riconfigurabilità alle future evoluzioni e aggiornamenti; • Capacità di integrazione con altre tecnologie (ad es. sistemi di
comunicazione) e/o ibridazione con altri sistemi di posizionamento. L’architettura del ricevitore presa in considerazione dallo SWAN va dalla più semplice, a singola frequenza, alle più elaborate, adatte per specifiche applicazioni, quali la sicurezza ed applicazioni governative, includendo anche ibridazioni con tecnologie di comunicazione e posizionamento locale. Possono così essere identificate tre classi di ricevitore GNSS:
• ricevitori a singola frequenza adatti per un mercato di massa, indicati
per applicazioni di navigazione automobilistica e personale (indoor e
outdoor);
• ricevitori professionali (singola e doppia frequenza), indicati per
applicazioni scientifiche, di sincronizzazione, sorveglianza, ingegneria civile e sistemi di informazione geografica;
• ricevitori SoL (doppia e tripla frequenza), indicati per applicazioni
aeronautiche, navali, ferroviarie, servizi di emergenza, ricerca e di sorveglianza del traffico.
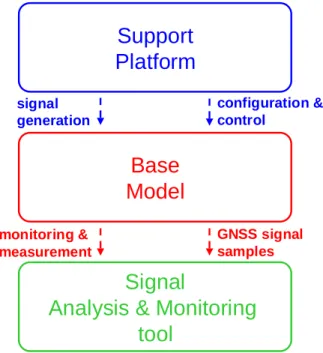
Al fine di ottenere un alto livello di flessibilità e riconfigurabilità, il progetto SWAN si basa su una struttura composta da tre elementi principali (Fig. 2.1):
• La Piattaforma di Supporto, che ha il compito di testare il Modello Base con segnali generati in tempo reale appartenenti a differenti
livelli, radio frequenza (RF), frequenza intermedia (IF) e banda base (BB), e che provvede inoltre a collegare il modello di base con il tool di monitoraggio ed analisi;
Support
Platform
Base
Model
Signal
Analysis & Monitoring
tool
configuration & control signal generation GNSS signal samples monitoring & measurementFig. 2.1 - Architettura progetto SWAN
• Il Modello di Base, che costituisce il terminale di ricezione e elaborazione dei dati, basato su una architettura particolarmente flessibile, costituisce l’elemento chiave per eseguire il livello di implementazione;
• Il Tool di Analisi e Monitoraggio (Monitoring & Analysis Tool, MAT), consente di valutare le prestazioni del segnale di navigazione (inclusi attuali e futuri segnali GNSS e future proposte di particolari forme d’onda) con il compito di monitorare e elaborare i dati sia off-line che
Signal
Generator MMI
RF/IF/BB Configuration
& control Fig. 2.2 - Piattaforma di Supporto
2.2 - Piattaforma di supporto
Come già anticipato, il progetto SWAN opera su due livelli, quello di simulazione e quello di implementazione, allo scopo di realizzare tre elementi: il Modello Base (Base Model, BM), il tool di analisi e monitoraggio dei segnali e la piattaforma di supporto.
La piattaforma di supporto, come indica il nome, fornisce i programmi necessari per integrare i due elementi precedenti.
Lo schema a blocchi relativo alla piattaforma di supporto (SP) è riportato in Figura 2.2. Come si può vedere, gli elementi fondamentali della SP sono:
• il generatore di segnali (RF/IF/BB), che ha il compito di stimolare il BM quando non sono disponibili segnali dallo spazio (SIS, Signal In
Space), o quando è richiesta una specifica analisi;
• MMI (Man-Machine Interface), utilizzata per configurare il modello base, e il tool di monitoraggio e analisi.
2.3 Modello di Base (BM)
Il Modello di Base costituisce l’elemento chiave per eseguire il livello di implementazione, dal momento che realizza l’intera catena ricevente GNSS.
Il Modello di Base è un’architettura aperta GNSS basata sulla filosofia SDR, ed è progettato per coprire una vasta gamma di segnali di navigazione, con differenti livelli di complessità (dai ricevitori SoL a quelli diretti al mercato di massa).
Il BM, che si interfaccia con gli altri due elementi del sistema, è progettato per ricevere, convertire e campionare i segnali provenienti sia dallo spazio (SIS-Signal in Space), che dalla piattaforma di supporto. E’ inoltre in grado di eseguire tutte le operazioni digitali al fine di elaborare il segnale ricevuto per poi fornire le informazioni utilizzate nel calcolo della posizione e nella fase di monitoraggio delle performance, e in aggiunta rende disponibili al MAT (Monitoring Analysis Tool) i campioni I/Q del segnale GNSS necessari a svolgere la fase di analisi.
Nella Fig.2.3 è mostrata l’architettura del Modello di Base nella quale possono essere individuate cinque sezioni:
1. Antenna e RF front-end; 2. Sezione di conversione RF/IF; 3. Gestione del clock;
4. Sezione digitale con FPGA e DSP; 5. PC-board.
L’antenna e l’RF front-end si occupano di ricevere i segnali GALILEO, GPS (L1, L2 e L5) e EGNOS, allo scopo di fornire una adeguata protezione da interferenze, e mandare tali segnali in ingresso al ricevitore. La seconda sezione ha il compito di inviare i segnali all’ADC con l’appropriato livello di potenza.
Per poter consentire al Modello di Base di effettuare modulazioni a larga banda, la banda del ricevitore è impostata a 28 MHz. Inoltre il BM include una
sezione di gestione del clock, con lo scopo di controllare tutte le operazioni che dipendono dalla accuratezza delle tempistiche.
RF front-end clock management GNSS antenna base-band receiver (FPGA/DSP/ PC-board) RF/IF down-conversion
to signal analysis & monitoring tool
GNSS signal samples monitoring & measurement SIS RF IF BB
from support platform configuration
& control
Fig. 2. 3 – Architettura del Modello di Base
I due rimanenti blocchi (sezione digitale e PC-board), effettuano tutte le operazioni di calcolo digitale. Il particolare tipo di ricevitore SDR viene scelto in funzione degli obiettivi assegnati ad ogni sezione. All’interno del progetto SWAN vengono utilizzate tre tipi di architetture:
• architettura classica: l’FPGA (Field Programmable Gate Array)
svolge i compiti tipici di un GNSS ASIC (Application Specific
Integrated Circuit), sebbene le rimanenti applicazioni in banda base e
software sono lasciate al DSP (Digital Signal Processor); in particolare, l’FPGA ha il compito di svolgere tutte le operazioni in banda base ad alta frequenza (ad esempio le correlazioni), mentre il DSP svolge tutte le altre operazioni in banda base (inclusa l’acquisizione) e implementa le parti rilevanti del software di
navigazione; la PC-board contiene solamente le funzioni di configurazione, incluse la MMI e i rimanenti obiettivi del SW di navigazione. Tale soluzione è utilizzata per realizzare un ricevitore a doppia frequenza per servizi SoL nelle bande L1 e L5 del GPS, E5 di GALILEO e L1 di EGNOS;
• architettura ibrida: in questo caso l’FPGA svolge una parte
considerevole delle operazioni in banda base (inclusa l’acquisizione), includendo anche il motore dell’acquisizione (acceleratore hardware) e le connessioni ad alta velocità verso la PC-board; il DSP svolge i compiti di configurazione e connessione al ricevitore, mentre la PC-board svolge le rimanenti operazioni in banda base e le applicazioni SW; in particolare, esegue gli algoritmi di navigazione, le funzioni di gestione del ricevitore e l’MMI. Questa configurazione è impiegata per ricevitori professionali a singola frequenza per la banda E5a del Galileo dedicata all’OS (Open Service);
• architettura fully-SW: l’FPGA esegue funzioni per trasferire i campioni
digitali al PC, mentre il DSP compie solo l’inizializzazione del ricevitore e compiti di configurazione; la PC-board da sola esegue tutte le funzione di navigazione. Tale configurazione è utilizzata nel caso di ricevitori a singola frequenza adatte alla banda E1/L1 sia di GPS che di GALILEO, per servizi commerciali.
Come si può facilmente notare, la struttura generale scelta per il BM è in grado di fornire un ampio potenziale per una larga scelta di applicazioni, grazie all’estrema riconfigurabilità e flessibilità del terminale. La configurazione fully-SW, ovviamente, è quella che richiede una maggiore complessità computazionale in fase di realizzazione, quindi è preferibile dedicare questo tipo di architetture a quei servizi già studiati e testati (come ad esempio il segnale C/A L1 del GPS). Utilizzando l’approccio fully-SW, il Base Model del progetto SWAN è in grado di fornire utili test
per nuovi e più robusti algoritmi di elaborazione dei segnali, allo scopo di migliorare l’accuratezza delle soluzioni PVT. Ciò può essere implementato semplicemente facendo girare delle specifiche routine sulla PC-board, senza dover riprogrammare ulteriormente la sezione hardware. Come conseguenza, questo tipo di configurazione funge da piattaforma con lo scopo di favorire la ricerca nel campo della navigazione satellitare. Per giunta, fin tanto che il Modello di Base è in grado di ricevere in ingresso segnali appartenenti a differenti livelli della catena ricevente, possono essere studiati e valutati nel particolare gli effetti della configurazione dell’architettura.
Inoltre, è anche interessante realizzare un dispositivo riconfigurabile in grado di funzionare da ricevitore GNSS per quei servizi più elaborati, come quelli associati alla banda L5/E5, i quali, al giorno d’oggi, possono essere ottenuti tramite configurazioni un po’ meno flessibili (ibrida) o controllate via software (classica). Tuttavia, il BM offre un’ottima piattaforma in grado di testare e mettere a confronto le prestazioni di differenti segnali e/o servizi.
Infine, lo stato del Modello di Base può essere monitorato e misurato costantemente, infatti, i collegamenti verso il tool di analisi e monitoraggio dei segnali, riportati nella Fig. 2.3, vengono utilizzati per operare, sia in tempo reale che
off-line, i suddetti controlli sul dispositivo.
Per ulteriori informazioni si rimanda a [5].
2.4 Tool di Monitoraggio e Analisi
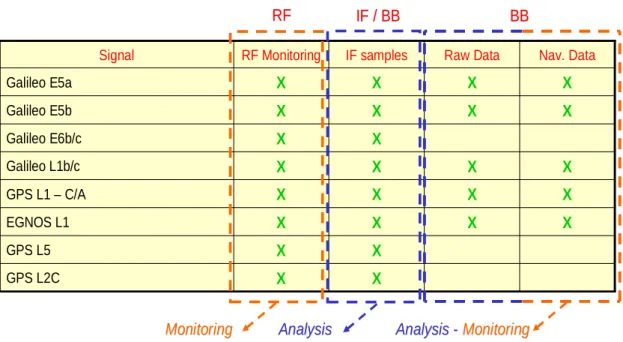
Il tool di monitoraggio e analisi MAT è un’applicazione software che ha il compito di monitorare e analizzare il funzionamento del BM, tramite un set di parametri a radiofrequenza a frequenza intermedia e in banda base (fig. 2.4)
X X GPS L2C X X GPS L5 X X X X EGNOS L1 X X X X GPS L1 – C/A X X X X Galileo L1b/c X X Galileo E6b/c X X X X Galileo E5b X X X X Galileo E5a Nav. Data Raw Data IF samples RF Monitoring Signal X X GPS L2C X X GPS L5 X X X X EGNOS L1 X X X X GPS L1 – C/A X X X X Galileo L1b/c X X Galileo E6b/c X X X X Galileo E5b X X X X Galileo E5a Nav. Data Raw Data IF samples RF Monitoring Signal Monitoring
Monitoring AnalysisAnalysis AnalysisAnalysis--Monitoring Monitoring RF
RF IF / BBIF / BB BBBB
Fig. 2.4 - Tipi di segnale monitorati e analizzati
L’analisi, sarà realizzata grazie ad un’elaborazione in tempo reale sui campioni I/Q forniti dal modello di base, per mezzo della piattaforma di supporto, con frequenza pari ad 1 Hz. Il monitoraggio invece, anch’esso svolto in tempo reale, consisterà in una semplice visualizzazione dei dati ricevuti ogni secondo dal BM:
• per le diverse applicazioni, consumer, professional, safety of life; • nei differenti scenari, presenza/assenza di cammini multipli e/o di
interferenti;
• con i diversi segnali GNSS, GALILEO, GPS, EGNOS;
• per differenti combinazioni di segnali GNSS (GPS, GALILEO, EGNOS, GPS+EGNOS, GPS+EGNOS+GALILEO)
Monitoring and Storing Configuration and control Analysis and Storing Base Model outputs,
transmitted by the Support Platform via Ethernet
connection
Database
MMI
Monitoring and Analysis Tool Support
Platform
Results Results Query
Monitoring and Storing Configuration and control Analysis and Storing Base Model outputs,
transmitted by the Support Platform via Ethernet
connection
Database
MMI
Monitoring and Analysis Tool Support
Platform
Results Results Query
Modular SW Architecture Modular SW Architecture Management Monitoring and Storing Configuration and control Analysis and Storing Base Model outputs,
transmitted by the Support Platform via Ethernet
connection
Database
MMI
Monitoring and Analysis Tool Support
Platform
Results Results Query
Monitoring and Storing Configuration and control Analysis and Storing Base Model outputs,
transmitted by the Support Platform via Ethernet
connection
Database
MMI
Monitoring and Analysis Tool Support
Platform
Results Results Query
Modular SW Architecture
Modular SW Architecture
Management
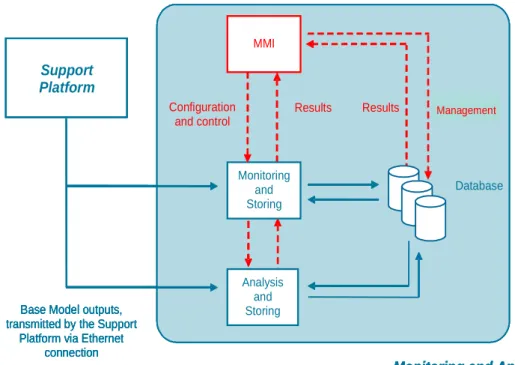
Fig. 2.5 - Architettura MAT
Da una rapida analisi della figura 2.5, si può vedere che :
• I dati in uscita dal BM vengono forniti al MAT dalla piattaforma di supporto, tramite una connessione Ethernet; questo perché, anche se il MAT è logicamente contenuto all’interno della piattaforma di supporto, esso è fisicamente posto in un PC differente rispetto a quello della piattaforma di supporto.
• Il modulo di Monitoring & Storage, permette di monitorare in tempo reale sia l’uscita che l’evoluzione temporale di alcuni parametri forniti dal modello di base, alle diverse frequenze, senza effettuare alcuna operazione di processing. Inoltre da la possibilità di effettuare lo storage dei dati monitorati.
• Il modulo di Analysis & Storage effettua un’analisi, anch’essa in tempo reale, di un set di caratteristiche dei segnali processati dal BM. L’analisi sarà compiuta ricorrendo ad alcune routine software, sviluppate ad-hoc, che operano sul segnale in uscita dal BM, e che permettono, ad esempio, di effettuare l’analisi spettrale del segnale ricevuto o di calcolarne la potenza. L’analisi è condotta principalmente attraverso il processing dei campioni complessi I/Q del segnale, prodotti dal BM. Questi campioni I/Q, prossimi alla BB in una misura che tiene conto del tipo di segnale e delle frequenze, hanno una componente di frequenza residua di circa 1 MHz. Attraverso il processing dei Raw Data è inoltre possibile estrarre alcune utili informazioni, come ad esempio l’individuazione di eventuali Cycle Slip. Anche questo modulo da la possibilità di memorizzare i risultati relativi all’analisi.
• L’MMI, deve permettere all’utente la configurazione e il controllo delle operazioni che devono essere eseguite dal MAT, nonché la scelta dei parametri utilizzati nell’analisi, come ad esempio il tipo di finestra utilizzata per il calcolo della densità spettrale di potenza e la lunghezza di tale finestra. Deve inoltre visualizzare i risultati relativi all’analisi e al monitoraggio, ed infine, deve dare la possibilità di scegliere se memorizzare o meno i risultati ottenuti. • Il Database, contiene al proprio interno quei dati che si è scelto di
salvare, e da la possibilità di accedervi in qualsiasi istante.
Per quanto riguarda gli elementi innovativi introdotti dal MAT, bisogna osservare come tale strumento permetta lo studio, non solo dei segnali GPS/GALILEO/EGNOS già esistenti, ma anche di quelli futuri; inoltre, l’architettura modulare del MAT, in perfetto accordo con la tecnica SDR, consente, da un lato,
l’aggiornamento delle routine preesistenti, dall’altro, la possibilità di integrare nuovi moduli software per incrementare le capacità del MAT stesso.
Come verrà chiarito nel terzo Capitolo, tutte le routine MAT sono scritte in linguaggio C, sfruttando le funzioni incluse nel package Gtk+, ed eseguite in ambiente Linux, distribuzione Fedora.
I parametri da monitorare sono suddivisi in due categorie: radiofrequenza e banda base. I dati in banda base, sono a loro volta suddivisi in Raw Data, relativi a ciascun canale in fase di tracking, e Navigation Data.
Di seguito vengono riportate una serie di tabelle contenenti tutti i parametri utilizzati per l’analisi e per il monitoraggio. Per ciascun parametro ne viene indicato il ome, la dimensione espressa in byte, il valore massimo, il valore minimo, l’unità di misura, la risoluzione e una breve descrizione.
Vale la pena osservare che:
• I parametri a RF sono riferiti alle 4 possibili catene a RF; • I campioni I/Q sono forniti solo da una delle suddette catene;
• I Raw Data si riferiscono ai 64 canali che possono essere contemporaneamente ricevuti dal BM.
RF DATA
Campo Dimensione
(Byte) Min. Max
Unità di
misura Risoluzione Descrizione
Frequency 1 -1 5 NA NA Frequenza: -1 = non disponibile 0 = E1/L1 1 = E6 2 = E5A/L5 3 = E5B 4 = L2 AGC Value 1 0 63.5 [dB] 0.5 Valore della attenuazione introdotta dall’AGC.
Campo Dimensione
(Byte) Min. Max
Unità di
misura Risoluzione Descrizione
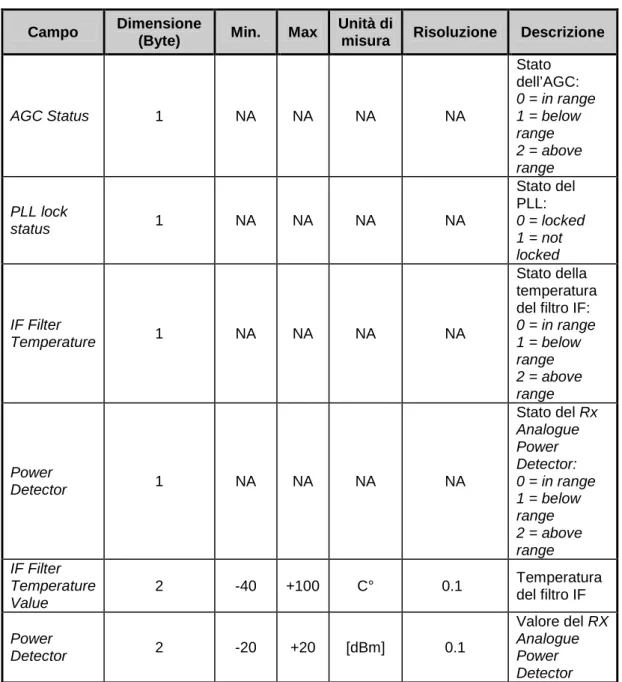
AGC Status 1 NA NA NA NA Stato dell’AGC: 0 = in range 1 = below range 2 = above range PLL lock status 1 NA NA NA NA Stato del PLL: 0 = locked 1 = not locked IF Filter Temperature 1 NA NA NA NA Stato della temperatura del filtro IF: 0 = in range 1 = below range 2 = above range Power Detector 1 NA NA NA NA Stato del Rx Analogue Power Detector: 0 = in range 1 = below range 2 = above range IF Filter Temperature Value 2 -40 +100 C° 0.1 Temperatura del filtro IF Power Detector 2 -20 +20 [dBm] 0.1 Valore del RX Analogue Power Detector
Tab. 2.1 - Parametri di monitoraggio a RF
BB RAW DATA
Campo Dimensione
(Byte) Min. Max
Unità di misura Risoluz. Descrizione Signal Channel Number 1 0 63 NA NA Numero del Canale
Campo Dimensione
(Byte) Min. Max
Unità di misura Risoluz. Descrizione SV ID 2 0 NA NA ID del satellite assegnato allo specifico canale Channel Status 1 NA NA NA NA Si veda la Tab. 2.4 Pseudo range 8 -1.8·10 8 1.8·108 [m] NA Misura dello pseudorange, cioè della distanza fra satellite e ricevitore Doppler 8 -5225 -4265 -4026 -3924 -TBD 5225(E1) 4265(E6) 4026(E5B) 3924(E5A/L5) TBD(L2) [Hz] NA Shift di frequenza dovuto all’effetto doppler Accumul. Doppler Range 8 -2.0·108 2.0·108 [cycles] NA Doppler accumulato. C/No 8 0 100 [dBHz] NA C/N0 Lock Time 2 0 65535 [s] NA Durata agganciamento canale, valutata modulo 65535s Carrier Cycle Slips Parameter 80 0 (or 0x8000) +1 (or 0x7FFF) NA NA Campioni del segnale errore all’uscita del PLL. Signal Type 2 0 7 NA NA Tipo di segnale: 0=GPS_L1 1=GPS_L2c 2=GPS_L5 3=GEO_L1 4=GAL_L1 5=GAL_E6 6=GAL_E5a 7=GAL_E5b
Campo Dimensione
(Byte) Min. Max
Unità di misura Risoluz. Descrizione Demodulation Status 1 NA NA NA NA Bit 0: Canale attivo(0 se lo stato del canale è idle e SVID = -1) Bit 1: Framed (Data framed once since signal acquisition) (1 = TRUE; 0 = FALSE) Bit 2: Collecting symbols (1 = TRUE; 0 = FALSE) Bit 3: Data Available (1 = navigation data page framed) Bits 4-5: Valid Data 0 = Valid CRC Passed; 1 = Invalid CRC Failed; 2 = CRC not checked (*) Bits 6-7: Riservati Receiver Time in RLT 16 NA NA NA NA Si veda la Tab. 2.5
Campo Dimensione
(Byte) Min. Max
Unità di misura Risoluz. Descrizione Navigation Message 64 NA NA NA NA Messaggio di Navigazione (De-interleaved, FEC decoded and Page Framed) I dati relativi al Synch e alle tail non vengono trasmessi. Questo campo non viene visualizzato nell’attuale versione del MAT; tuttavia le relative informazioni vengono memorizzate all’interno del database. Tab. 2.2 - Raw Data in BB
BB NAVIGATION DATA
Campo Min. Max Unità di
misura Risoluzione Descrizione
PDOP 0 50 NA NA
Valore del Position Diluition of Precision. Da questo parametro dipende l’accuratezza della misura
Campo Min. Max Unità di
misura Risoluzione Descrizione
HDOP 0 50 NA NA
Valore del Horizontal Diluition of Precision. Da questo parametro dipende l’accuratezza della misura
VDOP 0 50 NA NA
Valore del Vertical Diluition of Precision. Da questo parametro dipende l’accuratezza della misura
TDOP 0 50 NA NA
Valore del Time Diluition of Precision. Da questo parametro dipende l’accuratezza della misura
Latitude -90 90 [deg] NA Latitudine
Longitude -180 180 [deg] NA Longitudine
Altitude 0 NA [m] NA Altitudine Vx 0 NA [km/h] NA Velocità lungo x Vy 0 NA [km/h] NA Velocità lungo y Vz 0 NA [km/h] NA Velocità lungo z Time 0 NA [s] 1 Tempo indicato in secondi totali dall’inizio che è: - 6 gennaio 1980 per GPS - 22 agosto 1999 per GALILEO
Per avere questa informazione si fa riferimento al parametro Temporal Reference System
Clock bias 0 NA [s]
Scarto fra il tempo segnato dal ricevitore e quello indicato dall’orologio a bordo dei satelliti
Campo Min. Max Unità di
misura Risoluzione Descrizione
Clock bias rate 0 NA Velocità di variazione
del clock bias Type of Navigation solution NA NA NA NA Indica il tipo di algoritmo di soluzione: WLMS, WLMS corrected, Time only; Temporal Reference System NA NA NA NA Indica il sistema di riferimento temporale. Valori possibili sono GPS, GALILEO, UTC. Residuals 0 NA [m] NA
Errore residuo negli pseudoranges utilizzati per il calcolo della soluzione Channel used in PVT computation NA NA NA NA Sottoinsieme dei satelliti in tracking. Sequenza di 64 flag ciascuno dei quali indica se il canale relativo è stato utilizzato o no nel calcolo della PVT Tab. 2.3 - Navigation Data in BB
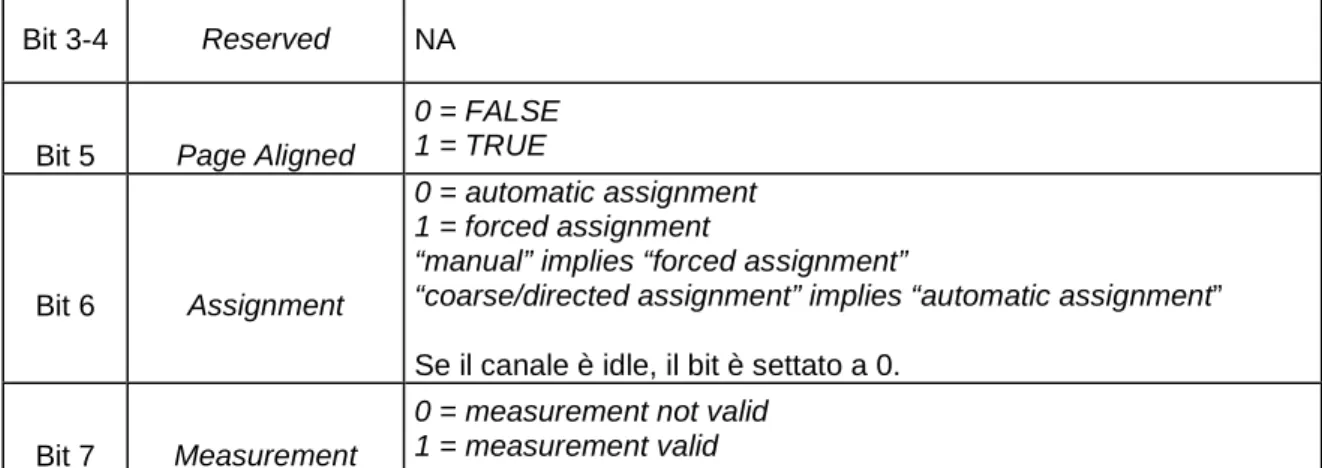
Bit Campo Descrizione
Bit 0-2 Channel State
0 = Idle
1 = Sky Search (Cold and Warm Start) 2 = Directed Search (Hot Start) 3 = Code Pull In (only DLL in lock) 4 = Frequency Pull In (only phase in lock) 5 = Establishing Secondary Code Alignment 6 = Steady State Tracking (data & pilot full tracked) 7 = Fault Detection
Bit 3-4 Reserved NA
Bit 5 Page Aligned
0 = FALSE 1 = TRUE
Bit 6 Assignment
0 = automatic assignment 1 = forced assignment
“manual” implies “forced assignment”
“coarse/directed assignment” implies “automatic assignment” Se il canale è idle, il bit è settato a 0.
Bit 7 Measurement
0 = measurement not valid 1 = measurement valid
Tab. 2.4 – Campo Channel Status
Field Dimensione
(Byte) Min. Max Units Resolution Description
Week Number 4 -2^30+1 2^30-1 [Weeks] 1 Valore della settimana corrente. Week Time 4 0 604799999 [ms] 1 Tempo della settimana espresso in millisecondi Millisecond Time 4 0 999999999 [ps] 1 Picosecondi all’interno del corrente millisecondo Tab. 2.5 – Campo Receiver Time in RLT
Campo Min. Max Unità di
misura Risoluzione Descrizione
Bandwidth Occupancy NA NA [MHz] NA Occupazione di Banda valutata al 99% della Potenza Totale Ricevuta, relativa alla catena RF Chan 3.
Received
Signal Power 0 NA [dB] NA
Valore della Potenza Ricevuta, valutata tramite integrazione numerica della densità spettrale di potenza stimata, relativa alla catena RF Chan 3. Carrier Cycle
Slip Detection NA NA NA NA
Indica per ogni istante la lista di canali sui quale si è verificato un cycle slip. Analisi Spettrale NA NA NA NA Grafico rappresentante la densità spettrale di potenza relativa alla catena RF Chan 3 valutata tramite analisi dei campioni I/Q ricevuti dal BM. Tab. 2.6 - Analysis Data