Capitolo 4
Il metodo del tempo di volo
4.1 Il laser ad impulsi
Abbiamo numerose volte citato nel corso del nostro lavoro il famoso sogno di Galileo Galilei di poter misurare le distanze con la luce. Egli pensava che ciò fosse possibile perché, conoscendo la velocità della luce, si poteva calcolare il tempo entro il quale essa raggiungeva un determinato obiettivo e da questo dedurne la distanza. Questo è certamente il modo più intuitivo col quale si può immaginare una misura di lunghezza con dispositivi ottici.
I dispositivi, però, osservati nei precedenti capitoli non hanno utilizzato, come abbiamo visto, questa idea.
È soltanto nell’ultimo ventennio che strumenti basati su tale principio si sono diffusi. Per quanto semplice si presentasse il principio, grossi ostacoli sono stati incontrati nel corso della storia per svilupparlo ed applicarlo nella pratica.
Nel capitolo 2 abbiamo definito la metodologia che usa quest’idea di misura ‘metodo del tempo di volo’, appunto perché lo sforzo è quello di calcolare il tempo durante il quale un raggio di luce, esattamente un impulso di luce, “ vola ” da un punto all’altro.
Come si capisce anche intuitivamente la sorgente di luce deve fornire un segnale discontinuo, di breve durata ed elevata potenza, quindi è necessario l’utilizzo di un cosiddetto laser ad impulsi. Ed è proprio grazie all’introduzione ed allo sviluppo dei laser a impulsi che codesta metodologia sta godendo di una certa fortuna al giorno d’oggi.
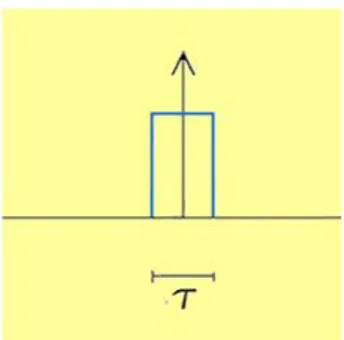
La necessità che l’impulso di breve durata trasporti notevole potenza impone a questi impulsi di tendere alla forma ideale di una δ di Dirac, e, di conseguenza, essi sono ‘ impulsi giganti ’ come si dice in gergo.
Fig. 1 impulso gigante del laser
In figura il simbolo indicante la δ di Dirac ideale è di colore nero, mentre in blu è descritto l’impulso gigante reale di durata τ ( piuttosto piccola ). L’altezza dell’impulso rappresenta la potenza trasportata che, al contrario, è molto grande. I laser ad impulsi giganti utilizzati per questi scopi, ed in particolare negli strumenti di misura, sono essenzialmente di due tipi:
a) laser a rubino Q-switched, b) laser a Nd ( neodimio ) in YAG.
I laser a rubino sono stati tra i primi ad essere introdotti già negli anni ’60, allora, tramite pompaggio, funzionavano in continuo, oggi invece vengono fatti funzionare ad impulsi in regime Q-switch. Non è interesse di questa tesi il trattamento di questo modo di funzionamento di un laser, ma è doveroso segnalare che, col modo detto Q-switch, grazie all’inserimento di uno schermo che impedisce l’immediata attivazione del laser ed alla sua improvvisa rimozione si ottengono potenze maggiori. Il colore tipico della luce emessa è il rosso, infatti la radiazione è al limite del visibile:
λ = 694,3 nm. ( 4 . 1 ) Il laser b) si basa sul neodimio in una matrice cristallina detta YAG cioè Yittrium Aluminum Garnet, la cui formula chimica è:
Y3 Al5 O12.
λ = 1,06 µm. ( 4 . 2 ) Entrambi i tipi di laser sono adatti per le nostre misure per due motivi fondamentali, il primo è che hanno un decadimento rapido e raggiungono l’equilibrio termodinamico in tempi minori rispetto ad altri laser di uso più comune. Questo vuole dire per noi un valore di τ piccolo e, di ciò, siamo contenti. Il secondo motivo è il basso costo delle barrette cilindriche che contengono il materiale attivo. Questo ci aiuta anche ad ottenere elevata energia senza dover innalzare eccessivamente il prezzo dell’eventuale strumento.
Abbiamo accennato alla modalità Q-switch di funzionamento dei laser ad impulsi, sia per il tipo a) che per quello b), in questa modalità riusciamo ad avere impulsi laser della potenza di decine di MW con una durata
τ = 20 ns.
Negli ultimi anni si è sviluppata un’altra modalità per questi laser, essa viene chiamata ‘ mode-locking ’.
Neanche per quest’ultimo modo ci attardiamo a spiegare nei dettagli il complesso funzionamento, né effettuiamo il calcolo del campo elettrico E del particolare risonatore usato.
Invece andiamo a sottolineare il vantaggio principale del ‘ mode-locking ’ che è la riduzione di τ, infatti otteniamo:
τ = 10 ps,
un valore di gran lunga più piccolo, senza perdere in potenza si guadagna in tempo. Esistono, poi, metodi intermedi ( ad es. il PTM ideato da Vuylsteke nel 1963 ) che sono più semplici del ‘ mode-locking ’, e con τ minori del già buono Q-switch, però maggiori dello stesso ‘ mode-locking ’.
Come si può comprendere, le tecniche per la costruzione di laser ad impulsi sono in continuo sviluppo e questo è fondamentale per gli strumenti di misura della distanza che sono oggetto del nostro lavoro.
4.2 Funzionamento di uno strumento “ pulse delay ”
Il metodo del tempo di volo a cui sopra abbiamo accennato viene altrimenti detto “ pulse delay ”, ovvero ritardo dell’impulso.
Vediamo ora, anche per questa metodologia, allo scopo di analizzarlo, uno schema di principio.
Fig. 2 diagramma a blocchi di un sistema di misura " pulse delay "
Come possiamo notare il sistema è fornito di un laser ad impulsi giganti collegato ad un generatore di impulsi ( clock ) e di un trasmettitore che indirizza l’impulso verso il target.
In un altro punto del sistema vi sono ricevitore e rivelatore ( detector ) che raccolgono il segnale di ritorno. Il rivelatore è collegato col contatore, il cui compito è, appunto, quello di calcolare il tempo di volo del segnale, che è, diviso per due ( andata e ritorno ), il tempo impiegato dall’impulso per coprire la distanza che noi intendiamo misurare.
Il trasmettitore ( un telescopio ) ed il ricevitore sono dispositivi ottici, mentre la parte restante del sistema è elettronica.
Il primo deve minimizzare l’angolo d’apertura, ovvero d’emissione dell’impulso luminoso, in modo da convogliare la massima potenza in direzione del target. Il secondo, invece, deve cercare di raccogliere e focalizzare il fascio ricevuto verso il rivelatore. Spesso col rivelatore vi è un fotomoltiplicatore che amplifica la luce nel caso essa fosse troppo debole. Il ricevitore è spesso composto da fotodiodi ( o altri dispositivi ) a vuoto e da fotosensori al silicio. Ultimamente, però, troviamo componenti speciali costruiti appositamente per questi strumenti.
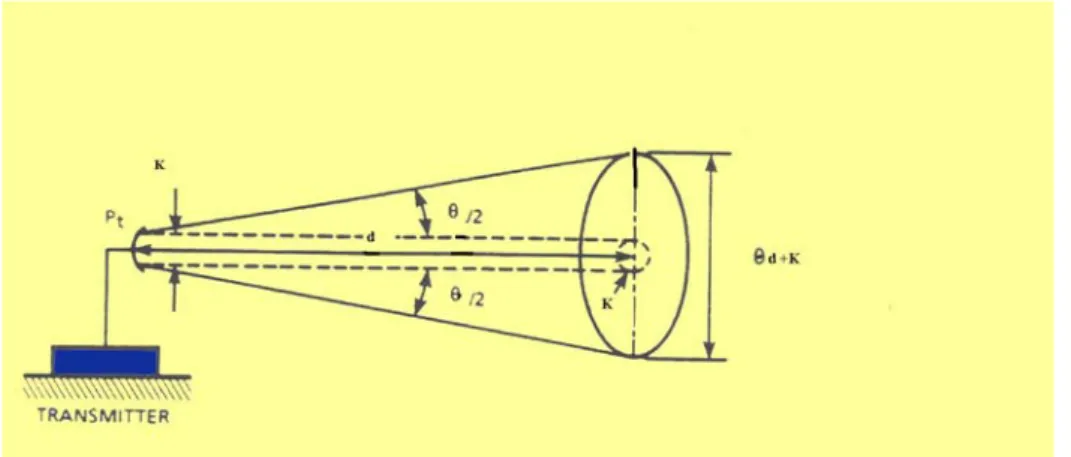
Chiamiamo k il diametro dell’antenna rappresentante il trasmettitore, d la distanza tra questo e una sezione qualsiasi dello spazio ( in pratica d sarebbe ciò che vogliamo misurare se il target fosse in questo punto ) e indichiamo con θ / 2 l’angolo d’apertura così come indicato in figura.
Fig. 3 invio del fascio dal trasmettitore al target
Calcoliamo l’area A della superficie circolare sulla quale incide il raggio emesso. Per far questo ricaviamo il suo diametro 2r:
2r = k + d θ / 2 + d θ / 2 = k + d θ ( 4 . 3 ) da alcune semplici regole di geometria e loro approssimazioni.
Ora possiamo valutare A:
Se Pt è la potenza inviata dal trasmettitore, la densità di potenza δ che otteniamo
sulla sezione è:
δ = T Pt / A = T Pt 4 / ( π ( θ d + k ) 2 ). ( 4 . 5 )
In quest’equazione T rappresenta le perdite di potenza del raggio luminoso lungo il tragitto dal sistema di misura alla sezione. Queste perdite sono dovute all’assorbimento, allo scattering nell’aria e a tutti quei fattori visti anche per alcuni metodi diversi nei precedenti capitoli. Questi fattori in generale riducono la potenza del segnale man mano che questo attraversa l’aria. T raccoglie in sé codesti fattori ed è chiamato coefficiente di trasmissione, possiamo ovviamente scrivere:
0 < T < 1. ( 4 . 6 ) Ora valutiamo anche il ritorno del segnale e, perciò, distinguiamo i due casi:
a) target non cooperativo ( superficie non riflettente e assenza di prisma o catarifrangente ),
b) target cooperativo.
4.3 Misura con target non cooperativo
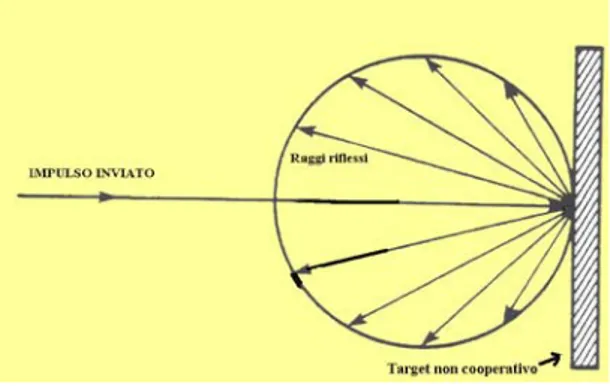
S’intende per target non cooperativo un obiettivo, una superficie che, invece di riflettere il raggio che la colpisce in una direzione specifica, tende a diffondere il segnale di ritorno in più direzioni.
Definiamo Y il coefficiente di riflessione del target e, consideriamo che, logicamente, il target sarà a distanza tale da avere un’area minore dell’area della sezione considerata nel precedente paragrafo. Ora denominiamo S l’area del target. La potenza Pr riflessa dal target è dunque:
Pr = Y S δ ( 4 . 7 )
con δ che è la densità di potenza trasmessa data dalla ( 4 . 5 ).
In δ c’è, ovvio, l’incognita d che, ora, rappresenta davvero l’obiettivo della nostra misura.
Questa potenza riflessa viene emessa, però, da un target non cooperativo e, quindi, inviata non lungo una direzione principale, ma diffusa in una semisfera come si può osservare nella fig. 4 ( pagina precedente ).
Cerchiamo di valutare quanta parte di Pr raggiunge il ricevitore ( anch’esso
rappresentato da un’antenna ) del nostro sistema.
Consideriamo una semisfera di raggio d, sulla superficie di questa semisfera vi è il ricevitore.
Denominiamo j il diametro dell’antenna ricevente e Prit la potenza che ritorna ad
essa.
Ricordiamo che il tutto deve esser moltiplicato per T poiché anche il raggio di ritorno attraversando l’aria subisce perdite.
Prit = T Pr ( j2 π / 4 ) / ( 2 d2 π ). ( 4 . 8 )
Da cui ( sostituendo Pr ):
Prit = T Y S δ ( j2 π / 4 ) / ( 2 d2 π );
e, ancora inserendo la ( 4 . 5 )
La ( 4 . 9 ) ci dà la parte di potenza trasmessa che ritorna al ricevitore tenendo conto di numerosi fattori, ora semplifichiamola utilizzando delle approssimazioni plausibili.
Poiché con questi metodi si misurano distanze notevoli è lecito supporre che d sia molto grande, mentre per costruzione sappiamo che k è molto piccolo, da cui ipotizziamo:
d θ >> k; ( 4 . 10 ) dalla ( 4 . 10 ) e dalla ( 4 . 9 ) scriviamo:
Prit = ( T2 Y S j2 / 2π θ2 d4 ) Pt. ( 4 . 11 )
Questa formula ci dà la potenza che ritorna al ricevitore.
Purtroppo, come si può notare, essa è fortemente influenzata dall’incognita d, obiettivo della nostra misura. Perciò per distanze d molto grandi, la potenza che arriva al ricevitore è talmente piccola da rendere il metodo inutilizzabile.
Per quanto riguarda gli altri parametri T e Y dipendono rispettivamente dal mezzo attraversato e dal materiale di cui è composto il target, essi variano molto, ma i valori statisticamente più probabili sono
T = 0,8 e Y = 0,5.
Invece j e θ sono parametri dipendenti dalla struttura del sistema, valori tipici sono θ = 0,01 rad e j = 0,1 m.
Resta da valutare S, molte case produttrici esplicitano un valore minimo della superficie del target S per effettuare una misura, spesso si tratta di una valore intorno ai 400 cm2.
Al di là dei valori di ogni singolo parametro, di ogni cambiamento atmosferico che influenza questi parametri, diciamo approssimativamente, tanto per dare un ordine di grandezza, che la potenza che ritorna al sistema in caso di target non cooperativo è spesso un miliardesimo di quella spedita.
Da questa considerazione possiamo capire il perché è necessario inviare un impulso ad elevato contenuto energetico e dedurre che, anche per questa metodologia, è conveniente l’uso dei prismi o, in generale, avere un target cooperativo.
Ovviamente non sempre è possibile ottenere un target cooperativo ( o naturale, o installando dei riflettori ). Comunque è possibile ricavare ugualmente d in caso di target non cooperativo, anche se con qualche restrizione in più ( riguardo alla potenza minima da usare, alla massima distanza misurabile e alla esattezza di alcune misure ).
4.4 Misure con target cooperativo
Ora applichiamo gli stessi ragionamenti del paragrafo precedente al caso di target cooperativo, cioè un target che, o per proprie caratteristiche, o perché dotato di prisma riflettore ( ad es. ‘ corner cube ’ ) riflette il fascio che lo ha colpito nella stessa direzione da cui proveniva, ma in verso opposto.
In più per questi target Y tende ad 1.
Sia Pr, al solito, la potenza riflessa dal target, allora
Pr = S δ, ( 4 . 12 )
dove S, stavolta, è l’area del prisma colpito dall’impulso luminoso. Ipotizzando il prisma circolare,
S = π b2 / 4 ( 4 . 13 )
con b diametro del prisma considerato.
Questa potenza non si espande in una semisfera come nel caso precedente, ma segue una direzione precisa come il raggio inviato. Anche questo raggio di ritorno, come quello ( vedi fig. 3 ), può divergere di un angolo piccolo, α / 2, dalla direzione di viaggio. Il valore di α si ottiene dalla seguente formula ( non è nei nostri interessi dilungarci per giustificarla ):
α = ( b / d ) + 2,44 ( λ / b ). ( 4 . 14 ) Ricordando che l’area dell’antenna ricevente è j2 π / 4 possiamo, conoscendo α, calcolare la Prit anche in questo caso.
Prit = T S δ ( j2 π / 4 ) / ( π / 4 ) ( d α + b )2. ( 4 . 15 )
Sostituendo nella ( 4 . 15 ) la ( 4 . 5 ), la ( 4 . 13 ) e la ( 4 . 14 ),
Prit = Pt T2 b2 j2 / ( d θ + k )2 ( 2b + 2,44 ( d λ / b ) )2. ( 4 . 16 )
Come prima, approssimiamo. Eseguiamo misure sufficientemente grandi per cui d è elevato, di conseguenza vale la ( 4 . 10 ) e in più, poiché λ / b è circa due ordini di grandezza minore di b, scriviamo per d >> 100 m che
2,44 ( d λ / b ) >> 2b. ( 4 . 17 ) Da ciò riscriviamo la ( 4 . 16 ) semplificata:
Prit = Pt T2 b4 j2 / 5,95 ( d4 θ2 λ2 ); ( 4 . 18 )
anche col target cooperativo la potenza ricevuta dal sistema di misura è inversamente proporzionale a d4, per cui a distanze eccessive essa è talmente piccola da non poter effettuare la misura vera e propria.
Senza svolgere complicati calcoli possiamo asserire, osservando una serie di casi pratici, che la potenza che, in caso di target cooperativo, ritorna al ricevitore è approssimativamente la millesima parte di quella inviata ( ricordiamo che per il target non cooperativo era addirittura la miliardesima parte ).
Con questi ragionamenti abbiamo valutato in termini di potenza la capacità di fare o no la misura, ora ci soffermiamo sul calcolo della misura stessa.
4.5 Calcolo della distanza col “ pulse delay ”
Il sistema elettronico conta, con un semplice contatore, i cicli di clock che intercorrono tra l’invio dell’impulso di luce e il suo ritorno al ricevitore, chiamiamo tv il “ tempo di volo ” dell’impulso così ricavato.
2d = tv v; ( 4 . 19 )
dove v rappresenta la velocità con cui si propaga l’impulso di luce. Se fossimo nel vuoto
v = c
con c che rappresenta appunto la velocità della luce nel vuoto cioè
c = 2,998 102 m/s. ( 4 . 20 )
Se consideriamo l’aria un mezzo dielettrico isotropo e lineare
v = c / ng . ( 4 . 21 )
Ora per le variazioni delle condizioni dell’atmosfera ng non sarà costante, ma di
questo problema abbiamo già parlato abbondantemente nel capitolo 3 al paragrafo 3.
È sufficiente ripetere che le considerazioni sull’indice di rifrazione di gruppo, la sua valutazione, i metodi di risoluzione del problema della sua esatta individuazione scritti per la metodologia “ phase shift ” sono identici anche per la “ pulse delay ”. Difatti l’indice di rifrazione di gruppo dell’aria è indipendente dal metodo di misura usato, ma è un parametro che rappresenta la situazione in cui si effettua la misura.
Ricordiamo che molti strumenti, quelli meno raffinati, utilizzano il valore di c al posto di v, considerando ng prossimo ad 1.
Ricaviamo d:
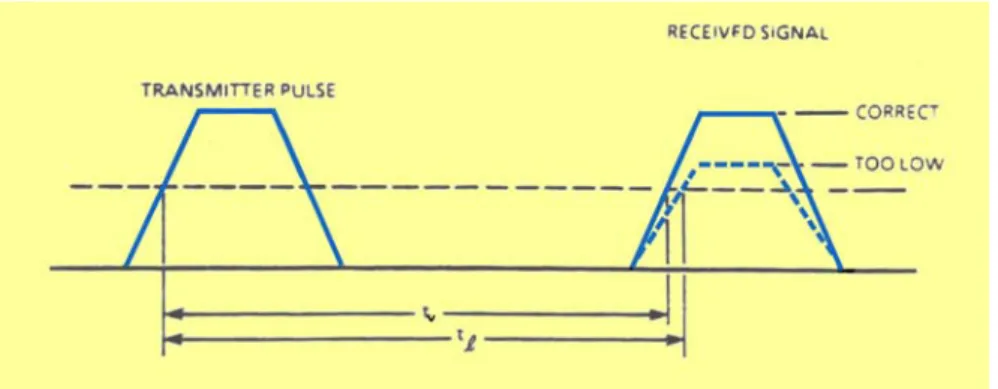
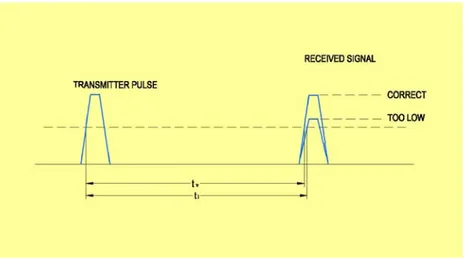
Come si nota bene, possediamo tutte le informazioni necessarie per ottenere d. Per il calcolo del tempo di volo, come si vede nella successiva figura, il sistema avvia il contatore quando l’impulso supera una determinata soglia e lo ferma quando l’impulso ricevuto raggiunge la stessa soglia.
Fig. 5 soglia per il calcolo del tempo di volo
Il problema di questo modo d’uso del contatore è che, come osservato nei precedenti paragrafi, l’impulso ricevuto è di gran lunga minore di quello trasmesso. Questo può implicare che la soglia per l’impulso di ritorno non venga mai raggiunta impedendoci in pratica di misurare. Comunque, anche nel caso essa venga raggiunta, ciò accade in netto ritardo rispetto al dovuto e otteniamo un calcolo errato ( per l’esattezza maggiore: tl > tv reale ).
Per ovviare a questo genere d’errore esistono sistemi che aggiustano automaticamente la soglia dell’impulso ricevuto, ma comunque questo problema continua a comportare, anche se minimo, un errore.
4.6 Problemi tipici di un “ pulse delay ”
Si è appena visto uno dei problemi di questo genere di misure, ora individuiamo ulteriori problemi e le loro conseguenze.
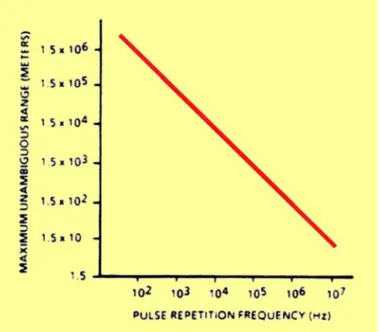
Un importante parametro di un sistema “ pulse delay ” è il cosiddetto prf ( pulse repetition frequency ), esso ci dice la quantità di tempo minima ( ovvero la frequenza massima ) che intercorre tra l’invio di un impulso e quello seguente. Ovviamente esso dipende dal sistema laser ( vedi paragrafo 1 ) e dal trasmettitore adottato, ma dipende anche dalla distanza che noi andiamo a misurare, perché non si può inviare un altro impulso se il ricevitore non ha già raccolto il ritorno del precedente.
Nella successiva figura ( fig. 7 ) osserviamo graficamente chiaramente come il prf viene appunto a dipendere, decisamente, dalla distanza misurata.
Il grafico ci chiarisce che, fissato un prf, esiste una massima distanza che si possa misurare senza ambiguità, ovvero sapendo con certezza a quale impulso trasmesso corrisponda l’impulso ricevuto.
Nel paragrafo 5 si è scritto come la posizione della soglia ci possa portare ad un errore nel conteggio del tempo di volo trascorso, esistono anche molti altri fattori che ci rendono difficile tale conteggio.
I più comuni li conosciamo, sono i tipici fattori che peggiorano un qualsiasi sistema di telecomunicazioni:
a) il rumore,
b) i jitter temoporali,
c) la banda e la riproducibilità del segnale da trasmettere,
d) la sensibilità del metodo che valuta l’attraversamento della soglia, e) l’accuratezza dei sistemi elettronici e, soprattutto, del contatore.
Tutti i problemi elencati sopra, sono i cosiddetti problemi di costruzione, cioè devono essere risolti in fase di costruzione del sistema scegliendo il contatore adatto, il controllore automatico di soglia più corretto, gli impulsi più facilmente riproducibili, i modi di trasmissione del segnale meno influenzati dal rumore, ecc. ecc.. C’è da dire che i produttori di codesti strumenti vengono spesso ( come in molti settori accade ) a compromessi tra costi e prestazioni.
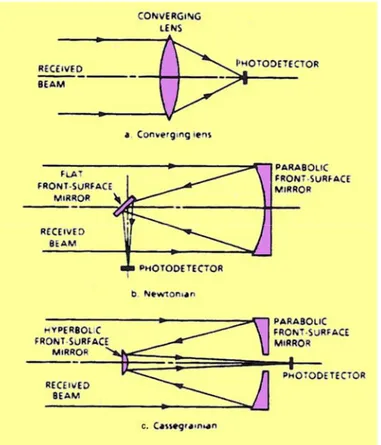
Vediamo nella prossima figura ( la fig. 8 nella pagina che segue ) tre modi di come, per esempio, si può costruire un ricevitore per ridurre il rumore.
Prima di inviare il fascio al fotorivelatore che trasforma il segnale da ottico in elettrico, esso attraversa dei filtri ottici a banda stretta che abbattono il rumore ed eliminano una serie di disturbi ottici esterni ( come la luce solare ed altri sorgenti indesiderate ).
Fig. 8 i tre principali tipi di ricevitori. Si differenziano per le lenti che filtrano il fascio prima del fotorivelatore.
Ripresentiamo la ( 4 . 14 ), formula con cui avevamo valutato α, l’angolo di divergenza del segnale riflesso.
α = ( b / d ) + ( 2,44 λ / b );
dove, ricordiamo, λ è la lunghezza d’onda del fascio ( a impulsi, nel nostro caso ), d la distanza da misurare mentre b è il diametro dell’emettitore ( lo specchio riflettente, nel nostro caso ) considerato circolare.
Il primo addendo dipende dalla distanza in cui noi ci poniamo, mentre il secondo addendo è indipendente da essa, ma è un parametro del sistema.
Soffermiamoci su questo secondo addendo.
È scontato che al crescere di b, l’angolo diminuisce e convogliamo più energia. Ciò permette misure a distanze maggiori e con più sicurezza dell’esito, ma fisicamente
è abbastanza difficile avere un b elevato, si perderebbe, oltre che in costi, in maneggevolezza e facilità d’uso dello strumento.
Anche questo è un problema che si risolve col compromesso.
4.7 Valutazione della bontà di un “ pulse delay ”
Per bontà di uno strumento, s’intende la qualità complessiva dello stesso strumento. Essa si può valutare dall’insieme dei parametri presentati nel capitolo 1 al paragrafo 2.
Il calcolo della distanza d si fa con la già citata ( 4 . 22 ) che riproponiamo: d = tv v / 2.
Iniziamo col dire che v, in molta parte della letteratura sull’argomento, viene fatta coincidere con c, la velocità della luce nel vuoto che conosciamo con estrema precisione ed esattezza. In realtà abbiamo già scritto ( vedi la ( 4 . 21 )) che:
v = c / ng ;
e, nell’intero corso di codesto lavoro, abbiamo numerose volte spiegato in che
modo l’inserimento di un parametro come ng, che è influenzato da condizioni
atmosferiche, comporti la perdita di esattezza e precisione e l’introduzione di un errore. Abbiamo anche già illustrato alcuni modi efficaci di ridurre l’errore ed aumentare la precisione.
Pertanto ipotizziamo di conoscere v con un errore molto piccolo, e soffermiamoci sul conteggio di tv.
Oggi uno strumento in grado di dare buoni risultati deve avere un’ottima sensibilità e, quindi, un errore relativo εr minimo. Consideriamo per i calcoli successivi di
avere
εr = 10-5. ( 4 . 23 )
Pensiamo, ad esempio, di dover misurare una distanza piuttosto piccola, d = 3 m. Vediamo cosa si ottiene.
Per semplicità, sia ng = 1
e, di conseguenza, v = c;
allora
tv = 2 d / v = 2 10-8 s = 20 ns. ( 4 . 24 )
Se εr = 10-5 allora dovremmo avere una sensibilità S:
S = εr tv = 0,2 ps ( 4 . 25 )
che è la sensibilità tipica degli orologi atomici al Cesio, ed è scontato che non è il caso di montarne uno sui nostri strumenti.
Abbiamo voluto dimostrare con questo esempio come sia difficile, per piccole distanze, ottenere con questo metodo misure esatte e, come, in fondo, sia inutile usare questo metodo per distanze meglio valutabili con le altre metodologie.
Vediamo invece cosa accade per distanze più considerevoli. tv = 2 d / v
come al solito, ma stavolta misuriamo una distanza d maggiore, d = 10 km.
Ciò implica che ( approssimando, al solito, v = c )
tv = 20000 / c = 0,066 ms. ( 4 . 26 )
Se, come nel caso precedente della ( 4 . 23 ), εr = 10-5 , questa volta otterremo
S = 0,66 ns, ( 4 . 27 ) valore più che accettabile.
Sul calcolo di d ciò comporterebbe una sensibilità della misura di d Sd = 1 cm.
Molti strumenti, nell’uso topografico, però, eseguono misure più corrette.
Il Wild DI 3000 DIOR, infatti, ha una sensibilità dichiarata di 3 mm, a cui, però, si deve aggiungere un εr = 1 p.p.m..
Se, con esso, misuriamo la precedente d = 10 km, la nuova Sd è 13 mm.
Per ottenere questo valore, si deve calcolare il tempo di volo in maniera migliore. S = 2 Sd / v = nel nostro ultimo esempio = 87 ps. ( 4 . 28 )
Si nota che la misura del tempo deve essere più fine, ma, comunque, ragionevolmente possibile.
Con esso è più facile cercare di determinare meglio anche distanze minori, come d= 3 m. Utilizzando ciò che viene dichiarato dallo strumento si ha
S = 20 ps.
Il Wild DI 3000 si permette questo in virtù di un sistema di misura che ha al suo interno clock diversi che effettuano diverse misure, di volta in volta più fine.
Altri sistemi che sfruttano questa idea sono lo Zeiss ELDI 10 e un modello della Fennel ( esattamente il numero 101 ).
Può sembrare che questi strumenti, poiché eseguono più misure, ci danno il risultato in tempi lunghi, così non è!
Il metodo del tempo di volo è ( s’intuisce dalla sua semplicità ) intrinsecamente più veloce degli altri metodi finora presentati. Anche se si ripete numerose volte la procedura di misura, resta decisamente più rapido del “ phase shift ”, ad esempio. Ora riprendiamo la ( 3 . 16 ), la formula usata dalle case produttrici per esprimere la deviazione standard σ della distanza misurata d:
σ = +/- ( c + k d );
le costanti c e k vengono fornite anche per gli strumenti “ pulse delay ”.
Notiamo, com’era lecito aspettarsi dai discorsi fatti in precedenza, che, per i sistemi “ pulse delay ”, il valore di k è minore rispetto ai sistemi “ phase shift ” e, quindi, sono sistemi più adatti alla misura di lunghe distanze.
Al contrario il valore di c è maggiore e ciò rende i sistemi sfruttanti il “ pulse delay ” meno adatti per calcolare brevi distanze.
Insomma, da quanto detto in questo paragrafo, risulta chiaro che i metodi “ pulse delay ” ( altrimenti denominati radar ottici ) sono adibiti alla misura di distanze lineari medio-alte ( da alcuni chilometri in su ) e il loro sviluppo è fondamentale soprattutto quando la distanza cresce.
Per concludere questo paragrafo sulla valutazione dell’esattezza delle misure, chiariamo un concetto generale, che vale, cioè, per ogni metodologia di misura. Abbiamo dato spesso per scontato che, effettuando tante volte una certa operazione e facendo il valor medio dei risultati ottenuti, diminuiamo il rischio d’errore.
Spieghiamo il perché, utilizzando nozioni di scienza delle probabilità: per ipotesi si effettui la misura di una distanza d, per es. con il metodo del “ pulse delay ” descritto in questo capitolo ( usiamo questo metodo per spiegare il fenomeno, ma ripetiamo che è valido anche per altri metodi ).
Il valore d è collegato in maniera direttamente proporzionale ( ricordiamo la solita ( 4 . 22 )) al tempo tv calcolato e viziato da un errore che non sappiamo determinare
esattamente. La variabile tv ha una deviazione standard, σ.
Iteriamo n volte la misura e ricaviamo n valori di tv che chiamiamo t1,t2, .., ti, .., tn;
calcoliamo successivamente il valor medio
tm = [ Σi=1…n ( ti )] / n; ( 4 . 29 )
il nuovo valore di d lo calcoliamo usando tm al posto di tv nella ( 4 . 22 ).
Sosteniamo che questo valore è più preciso, ovvero la deviazione standard di tm che
indichiamo con σm,è inferiore a σ.
Dalla teoria delle probabilità: in una somma di variabili indipendenti ( e le n misure operate lo sono ) la varianza della somma è la somma delle varianze. Perciò:
(σm)2 = n σ2 / n2 ( 4 . 30 )
e, operando la radice quadrata di ambo i membri,
σm = σ / √n. ( 4 . 31 )
La deviazione standard della distanza ottenuta come valor medio di n misure eseguite è la deviazione standard di una singola misura diviso la radice quadrata di n. Essa è, di conseguenza, molto più piccola e l’errore nella misura è ridotto.
4.8 Importanti applicazioni del metodo del tempo di volo
Il metodo del tempo di volo, pur essendo piuttosto recente, è stato già oggetto di importanti misure con egregi risultati.
Anche per esso, raccontiamo quelle applicazioni storicamente più significative. L’uso più comune di codesta metodologia di misura lo troviamo nel campo militare, la telemetria a modulazione di fascio, analizzata nel capitolo 3, non è adatta in questo settore. Essa, infatti, necessita di numerose misure a differenti frequenze come abbiamo visto e, conseguentemente, non dà il risultato della misura in tempi rapidissimi come esigono le misure nel campo militare. Il metodo del tempo di volo con laser ad impulsi giganti, al contrario, per distanze lunghe, ha bisogno di meno tempo ( come già notato nel paragrafo immediatamente precedente ) e viene pertanto utilizzato.
Sono, a tal proposito, stati sviluppati e prodotti strumenti di peso e dimensione tali da esser montati su aerei, carri armati ed artiglieria. Il più famoso di questi strumenti è il Telemetro M70B. È un telemetro con laser a neodimio in YAG. Le sue caratteristiche sono:
a) un impulso di durata 20 ns,
b) ogni impulso trasporta un’energia di circa 150 mJ, c) un prf piuttosto basso, prf ≅ 10 Hz,
d) una distanza massima misurabile con una certa sicurezza: 10 Km, anche se le condizioni meteorologiche possono condizionare in ambo i sensi questo dato, e) una risoluzione <= +/- 5 m / 10 Km, cioè 500 p.p.m.,
f) un peso di poco superiore ai 10 Kg,
g) le dimensioni sono circa ( in cm ): 15 x 15 x 43.
Si vede da questi dati ( basso prf e non elevata risoluzione ) che l’M70B non è un telemetro eccellente dal punto di vista delle prestazioni, ma il grosso vantaggio è qui la semplicità di installazione sui mezzi militari, lo scarso ingombro e la capacità di funzionare emettendo impulsi da mezzi in movimento.
Uno storico impiego della metodologia “ pulse delay ” è stata la famosissima misura della distanza Terra-Luna.
Nel corso delle missioni sulla luna Apollo 11 ( il primo storico allunaggio dell’uomo, quello di Armstrong &c. il 20 Luglio 1969 ), Apollo 14, e Apollo 15, gli astronauti hanno posto in appositi punti sulla superficie lunare alcuni giganteschi pannelli con grandissimi riflettori catadiottrici che fungono da enormi prismi.
Anche le missioni di allunaggio senza astronauti da parte dell’Unione Sovietica, Luna 17 e Luna 21, hanno depositato pannelli con lo scopo di essere utilizzati come prismi.
Dall’università del Texas ( USA ), esattamente dall’osservatorio Mac Donald, è stato successivamente mandato in direzione della luna un impulso laser di durata τ, τ = 4 ns.
Questo è un tipico impulso gigante di un laser a rubino in modalità Q-switched, e allora fu inviato da un telescopio di oltre 2 metri e mezzo.
Il segnale di ritorno è stato, poi, ricevuto da un ampio ricevitore. Richiamiamo qui sotto la ( 4 . 18 ) vista in precedenza:
Prit = Pt T2 b4 j2 / 5,95 ( d4 θ2 λ2 ).
In questa equazione, che ci calcola la Prit ( potenza di ritorno ) rispetto a quella
trasmessa, notiamo come all’aumentare dei parametri b e j, che rappresentano rispettivamente la grandezza dei prismi e quella del ricevitore, aumenta tale potenza. Ci servono alti valori per b e j poiché dobbiamo contrastare la diminuzione di potenza causata dall’enormità della distanza Terra-Luna da misurare ( d nella formula ).
Ed è stato, al solito, calcolato il valore della metà della distanza percorsa dall’impulso luminoso ( appunto la distanza Terra-Luna solo andata ) con la, a noi, nota ( 4 . 22 ):
d = tv v / 2.
L’impulso di luce, per buona parte del suo viaggio, percorre lo spazio. Noi sappiamo che lo spazio è approssimabile al vuoto e, quindi, la luce lo percorre con velocità prossima a c:
Deduciamo che, per misure di questo genere, l’influenza di ng e le possibilità di
errore ad esso collegate sono molto ridotte ( il breve tratto dell’atmosfera terrestre attraversato può influire poco ).
Questa misura, così effettuata, è stata precisissima, una delle più precise di sempre. L’incertezza con cui è stata determinata la distanza Terra-Luna è valutata intorno ai 15 cm soltanto. È stato ipotizzato che con impulsi di ampiezza
τ < 1 ns,
si può limitare codesta incertezza a non più di 2 o 3 cm.
La diminuzione della durata τ ci consentirà due vantaggi principali per quanto detto nel corso di questo capitolo.
Il primo è la diminuzione del prf con conseguente possibilità di misurare meglio distanze maggiori ( vedi la fig. 7 del paragrafo 6 di questo capitolo ).
Il secondo è che, diminuendo la durata dell’impulso, ci avviciniamo alla δ di Dirac ideale ( vedi fig. 1 del paragrafo 1 ) con conseguenti vantaggi per la trasmissione e la potenza. In più vengono eliminate o molto limitate varie cause di errore, tra cui l’errore dovuto alla posizione della soglia di cui abbiamo discusso al paragrafo 5 di questo capitolo ( vedi fig. 6 in quel paragrafo ). Infatti se l’impulso è molto stretto, una sua eventuale riduzione in altezza ( cioè in potenza ) non comporta una variazione sensibile dell’istante in cui attraversa la soglia. La figura ( fig. 9 ) seguente chiarisce questo concetto.
Si nota dalla figura che stringendo l’impulso, ovvero riducendone la durata, tl ( il
tempo rilevato ) si avvicina a tv ( il tempo di volo reale ), viene quasi a coincidere
con esso annullando quasi questo tipo di errore.
4.9 Altri usi del metodo del tempo di volo
Abbiamo detto, discorrendo della storica misura Terra-Luna, di come il metodo del tempo di volo sia utilizzabile nello spazio. In conseguenza di ciò, esso viene usato in molte applicazioni nei satelliti.
Telemetri funzionanti con tale metodo provvedono spesso a tracciare le rotte dei satelliti ( così come, nel settore militare, sono usati per il lancio di razzi e missili ); essi vi riescono per mezzo di una procedura a più passi, a partire dalla fase di lancio.
Per prima cosa bisogna inviare e fissare nello spazio un altro particolare tipo di satellite, un satellite che è fornito di un grosso trasmettitore ( un telescopio ) con laser ad impulsi giganti. La sua denominazione è SLR ( Satellite laser ranging ). La sua posizione nello spazio viene fissata con estrema esattezza: esso emette un impulso verso un ‘ corner cube ’ che è sulla terra, situato in un punto di cui conosciamo esattamente le coordinate. Ripetendo la misura più volte ( effettuando piccoli spostamenti ), si ottiene la posizione dell’SLR, che non muta più.
Quando, poi, si lancia nello spazio un nuovo satellite, possiamo, calcolando la distanza dall’SLR, controllarne la rotta.
In realtà, al giorno d’oggi, il cielo è pieno di questi SLR, dei veri e propri telescopi fissi che ci permettono di verificare e, eventualmente, modificare la rotta dei nuovi satelliti lanciati: per questo motivo si può sostenere che l’introduzione del “ pulse delay ” ci ha permesso di guidare con enorme accuratezza i satelliti nelle loro traiettorie.
Con questi satelliti e con altri simili è anche possibile, come ben sappiamo dalla vita d’ogni giorno, valutare sulla terra posizioni di punti e movimenti.
Esso rappresenta un’alternativa agli strumenti classici per la misura delle derive delle zolle della crosta terrestre ( abbiamo detto nel capitolo 2, e lo ricordiamo qui, che anche l’interferometria è stata utilizzata per tali fini ).
Il Lageos ( acronimo di LAser GEOdetic Satellite ) è un satellite passivo della NASA, esso fu lanciato nel 1976. La sua superficie è ricoperta da ben 426 riflettori catadiottrici fatti in vetro di silice. In direzione del Lageos vengono spediti una serie di impulsi luminosi con
τ ≅ 200 ps,
il laser che li invia è un classico laser a neodimio in YAG.
L’errore assoluto massimo della misura fatta tramite Lageos dichiarato dalla Nasa è:
εa = 2 cm.
Ora la misura di distanza col Lageos viene effettuata con regolarità da alcuni anni in diverse zone tettoniche della superficie terrestre individuate dai geologi. I dati, così registrati, rappresentano una misura, una verifica ed un controllo dei movimenti della crosta terrestre.
Questi dati, inoltre, hanno aiutato gli scienziati a fare mappe e previsioni della distribuzione globale delle zone sismiche sulla terra.
Nel terzo capitolo ( paragrafo 11 ), abbiamo introdotto le stazioni totali, sistemi di misura della distanza con molteplici funzioni.
Alcune di esse, le più moderne e versatili ( per esempio, la ‘ Trimble 3600 della Zeiss ’ ), hanno al proprio interno entrambi i metodi di misura: il “ phase shift ” e il “ pulse delay ” e scelgono, a seconda del tipo di operazione da eseguire la soluzione metodologica più adatta.
4.10 Brevi considerazioni finali sul “ pulse delay ”
Con il metodo del tempo di volo ( in inglese “ pulse delay ”, appunto ) abbiamo concluso la nostra carrellata sulle metodologie oggi in uso per la misura della distanza geometrica lineare.
Come abbiamo notato, questo metodo è di semplice concezione e molto facile da intuire e comprendere.
Esso è stato adottato da alcuni strumenti topografici negli ultimi anni e, probabilmente, sarà ancora enormemente sviluppato ed impiegato nel prossimo futuro.
Tra i suoi vantaggi c’è certamente la possibilità di eseguire molte misure ( pur perdendo in prestazioni ) senza prismi.
L’impiego di questa metodologia, come nel corso del capitolo è stato sottolineato, è soprattutto volto a distanze medio alte: da centinaia di metri a centinaia di chilometri fino a distanze siderali, come visto in precedenza per il calcolo della distanza Terra-Luna.
Il pregio più importante del “ pulse delay ” sono, però, i ridottissimi tempi di calcolo, ed è per questo motivo che esso viene utilizzato per le misure satellitari. Anche il “ pulse delay ”, come il “ phase shift ”, ha nelle condizioni atmosferiche che intervengono su ng, il suo nemico principale.
Gli altri limiti decisivi per le sue prestazioni sono τ, la durata degli impulsi e il già citato prf, che rappresenta la loro cadenza.
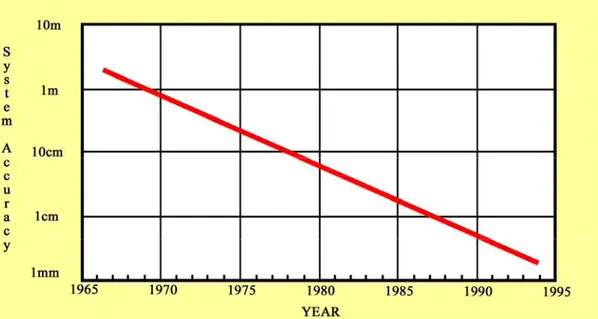
Sottolineando i grandi progressi nell’affidabilità e nella precisione ottenuti negli ultimi anni da strumenti adottanti il “ pulse delay ”, illustriamo ( dopo che essi sono stati opportunamente registrati ), con la fig. 10, gli enormi miglioramenti in accuratezza che essi hanno avuto negli ultimi 35-40 anni.
La retta di fig. 10, infatti, rappresenta l’andamento dell’accuratezza tipica di un sistema “ pulse delay ” dagli anni ’60 ad oggi.
Fig. 10 l'accuratezza dei " pulse delay " negli anni
Chiudiamo notando che, nonostante i grandi pregi di questa metodologia evidenziati in questo capitolo, molti degli strumenti topografici di oggi funzionano ancora col “ phase shift ”.