La rettifica delle immagini
2.1. Il tipo di dato utilizzato
Le immagini da satellite, oggetto di questa tesi, sono state acquisite dai sensori Landsat Thematic Mapper 5 e Enhanced Thematic Mapper 7.
Il Landsat è un sistema automatico di acquisizione di immagini satellitari inizialmente di proprietà della NASA (National Aeronautics and Space Administration), successivamente del NOAA (National Oceanic and Athmosferic Organization) e infine della EOSAT (Earth Observation Satellite Company).
I satelliti Landsat sono eliosincroni con uno swath di 185 Km, questo significa che la fascia di superficie vista dall’apparato, durante la sua orbita quasi polare attorno alla Terra, è ampia 185 Km in senso trasversale alla direzione del moto, come viene illustrato nella figura 2.1.
Le zone della superficie terrestre riprese dal sensore sono comprese tra le latitudini 81° Nord e 81° Sud.
La figura 2.2 relativa all’Italia, mostra il World Reference System: il reticolo di riferimento mondiale grazie al quale possono essere individuate le aree di interesse mediante le rispettive tracce e scene (track e frame). La sovrapposizione tra due track adiacenti, detto sidelap, aumenta gradualmente dall’Equatore verso i Poli (dal 7,6% all’Equatore, al 54% a 60° di latitudine).
La Provincia di Pisa, ambito di studio di questo lavoro, è visibile nel track 192 e frame 30 che contiene quasi tutta la Regione Toscana, e anche piccole porzioni dell’Umbria e del Lazio.
Figura 2.2: griglia delle immagini Landsat relative al territorio italiano, nel riquadro rosso l’area della Toscana (Istituto Nazionale di Geofisica e Vulcanologia).
I primi tre satelliti Landsat lanciati nello Spazio (Landsat 1, 2, 3) orbitano a 900 km di quota con periodi di passaggio di 18 giorni. Gli ultimi (Landsat 4, 5 e 7), invece, si trovano a un’altezza di 705 km e passano sopra uno stesso punto della Terra ogni 16 giorni.
I Landsat acquisiscono valori di radianza, cioè l’energia riflessa ed emessa dalla Terra, in più regioni dello spettro elettromagnetico.
Le porzioni di spettro rilevabili dai sensori prendono il nome di bande, esse sono 7 nel Temathic Mapper 5 (TM – 5), e 9 nella sua versione più evoluta l’Enhanced Tematic Mapper 7 (ETM – 7).
L’ampiezza di ciascuna banda, determinabile per differenza tra la lunghezza d’onda massima e quella minima, definisce la risoluzione spettrale dello strumento.
La tabella 2.1, elenca i valori di risoluzione spettrale dei sensori TM ed ETM per le bande multispettrali e la pancromatica. Quest’ultima, contrassegnata col simbolo “ * ”, interessa una regione spettrale relativamente ampia (da 0,52 a 0,90 µm), ed è caratterizzata da una risoluzione spaziale doppia rispetto alle bande TM ed ETM del visibile (verde e rosso) e dell’infrarosso vicino.
Il sensore ETM, oltre alla pancromatica, ha due bande nell’infrarosso termico (le bande 6 e 8) che acquisiscono nelle due modalità a basso ed alto guadagno strumentale, a una risoluzione spaziale doppia rispetto al corrispondente canale TM (120 m contro 60 m).
La tabella 2.1 riporta la risoluzione spaziale di ciascuna banda TM ed ETM, tali valori esprimono l’estensione dell’area minima rappresentata da un singolo pixel.
1 0,45 - 0,52 30x30 Blu visibile
2 0,52 - 0,60 30x30 Verde visibile
3 0,63 - 0,69 30x30 Rosso visibile
4 0,76 - 0,90 30x30 Infrarosso vicino
5 1,55 - 1,75 30x30 Infrarosso a onda corta
7 2,08 - 2,35 30x30 Infrarosso a onda corta
6 10,4 - 12,5 120x120 (60x60)* Infrarosso termico Pancromatica (0,52 - 0,90)* (15x15)* Bande TM ed ETM Risoluzione spettrale (µm) Risoluzione spaziale (m)
Regione dello spettro elettromagnetico
Tabella 2.1: dati di risoluzione spettrale e spaziale del satellite Landsat TM – 5, i valori contrassegnati con il simbolo asterisco si riferiscono alle bande del termico e alla pancromatica del Landsat ETM – 7 (http://ltpwww.gsfc.nasa.gov/IAS/handbook/handbook_toc.html).
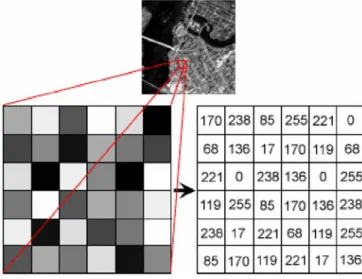
Le immagini digitali studiate in questo lavoro, di tipo raster, sono delle matrici bidimensionali di elementi chiamati pixels (acronimo di picture elements), la cui sequenza ordinata identifica la posizione di una specifica porzione di territorio.
La figura 2.3 mostra i pixels di un’immagine raster, i valori all’interno di ogni singola cella vengono indicati con la sigla “DN” (valori digitali) e ne rappresentano la relativa luminosità. Questi argomenti saranno trattati con maggior dettaglio nel capitolo 5.
Figura 2.3: un’immagine digitale di tipo raster.
I dati acquisiti in più regioni dello spettro vengono definiti multispettrali e costituiscono il punto di forza del telerilevamento. Considerate le caratteristiche del sensore montato, le scene da esso registrate permettono la stima di variabili tematiche relative a studi di carattere geologico, agricolo, forestale, cartografico e ambientale.
Alcuni esempi di applicazioni di telerilevamento, mediante immagini multispettrali Landsat TM – 5 ed ETM – 7, vengono elencate di seguito per i tre ambiti di studio atmosfera, acque e terre emerse ( da: http://www.lamma.rete.toscana.it/ita/):
1. previsioni meteorologiche, climatologia, meteorologia, previsioni piene, bilanci energetici e climatologia globale;
2. individuazione versamenti abusivi, previsione di impatto ambientale, inquinamento costiero, balneazione, risorse ittiche e dinamica correnti costiere; 3. analisi dell’uso del suolo, valutazione della biomassa e delle condizioni idriche
della vegetazione, calcolo di indici di rischio e stima dei danni da incendi, pianificazione del territorio e gestione delle risorse agricole e naturali.
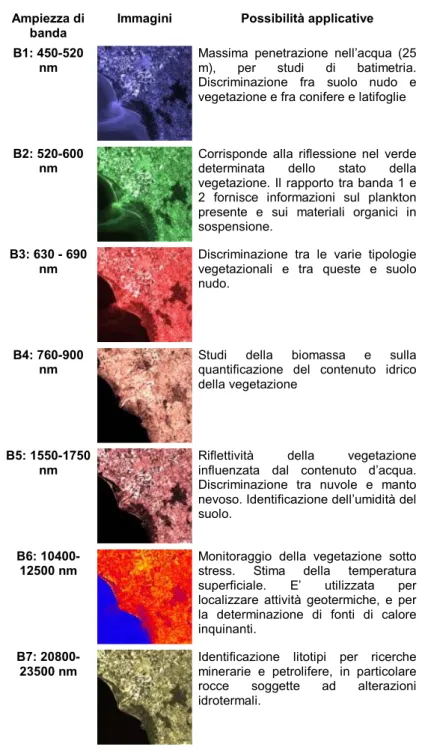
La tabella 2.2 riporta alcuni esempi di studi possibili attraverso l’analisi di immagini multispettrali Landsat TM, in ciascun riquadro compaiono dei raster visualizzati con rappresentazioni RGB a falsi colori. Il concetto delle composizioni RGB verrà approfondito nel capitolo 4 di questa tesi.
Ampiezza di banda
Immagini Possibilità applicative B1: 450-520
nm
Massima penetrazione nell’acqua (25 m), per studi di batimetria. Discriminazione fra suolo nudo e vegetazione e fra conifere e latifoglie
B2: 520-600
nm Corrisponde alla riflessione nel verde determinata dello stato della vegetazione. Il rapporto tra banda 1 e 2 fornisce informazioni sul plankton presente e sui materiali organici in sospensione.
B3: 630 - 690
nm Discriminazione tra le varie tipologie vegetazionali e tra queste e suolo nudo.
B4: 760-900 nm
Studi della biomassa e sulla quantificazione del contenuto idrico della vegetazione
B5: 1550-1750 nm
Riflettività della vegetazione influenzata dal contenuto d’acqua. Discriminazione tra nuvole e manto nevoso. Identificazione dell’umidità del suolo.
B6: 10400-12500 nm
Monitoraggio della vegetazione sotto stress. Stima della temperatura superficiale. E’ utilizzata per localizzare attività geotermiche, e per la determinazione di fonti di calore inquinanti.
B7: 20800-23500 nm
Identificazione litotipi per ricerche minerarie e petrolifere, in particolare rocce soggette ad alterazioni idrotermali.
Tabella 2.2: alcuni esempi dei principali campi di applicazione delle immagini multispettrali Landsat (da: http://www.lamma.rete.toscana.it).
Le immagini Landsat su cui si è articolato questo studio sono state messe a disposizione dall’Istituto Nazionale di Geofisica e Vulcanologia. La figura 2.4 riporta, a titolo esemplificativo, la scena Landsat ETM acquisita in data 15 Febbraio 2001.
I formati digitali delle Landsat TM – 5 ed ETM – 7 suddette, e i rispettivi sistemi di riferimento cartografici sono elencati nella tabella 2.3.
ESA standard Clarke 1866 - UTM (zone 32, north) NLAPS Geographical (Lat / Lon)
Landsat TM 5
Landsat ETM 7 CEOS Clarke 1866 - UTM (zone 32, north)
Tipo di sensore
Formato
digitale Sistema di riferimento
Tabella 2.3: formati digitali e sistemi di proiezione delle immagini satellitari a disposizione. In questo lavoro sono state impiegate carte tematiche relative ai suoli e alla vegetazione presenti nella Provincia di Pisa. Tali carte verranno presentate nel capitolo 3.
Il confronto tra dati cartografici e immagini satellitari, è stato possibile riferendo le carte di cui sopra, e le Landsat a disposizione, ad un unico sistema geodetico – cartografico comune, il WGS 84 – UTM (fuso 32) che è quello utilizzato, a livello internazionale, per i sistemi satellitari di posizionamento GPS.
Figura 2.4: immagine Landsat ETM – 7 della Toscana (track 192 frame 30), rilevata il 15 Febbraio 2001 (I.N.G.V.).
2.2. Nozioni di base di cartografia
Lo scopo di una carta geografica è quello di rappresentare, su di un piano, porzioni più o meno estese della superficie terrestre, fornendo ad ogni utilizzatore la concezione più efficace possibile della realtà esistente.
La Terra, a causa della non uniforme distribuzione delle masse nel suo interno e alla superficie di essa, ha una conformazione di equilibrio che viene detta geoide. Il geoide è la forma geometrica che dovrebbe meglio rappresentare teoricamente la figura della Terra. Esso, inoltre, risulta sempre perpendicolare alla direzione dell’accelerazione di gravità.
La posizione planimetrica dei punti della superficie terrestre viene calcolata sfruttando l’espressione matematica dell’ellissoide geodetico di riferimento, le cui proprietà geometriche e gravitazionali meglio approssimano quelle del geoide. L’equazione 2.1 mostra la formula dell’ellissoide di riferimento, i parametri a e c corrispondono ai semiassi equatoriale e polare rispettivamente.
1 2 2 2 2 2 = + + c z a y x
Equazione 2.1: formula dell’ellissoide geodetico di riferimento (Pasquarelli, 1987).
L’equazione 2.2 consente di ricavare il parametro dello schiacciamento α
a c a c a− = − = 1 α
Equazione 2.2: formula dello schiacciamento α (Pasquarelli, 1987).
La determinazione dei parametri a e c, oppure a e α, per la definizione dell’ellissoide geodetico di riferimento, si basa su: misure geodetiche (misure di archi di meridiano e di parallelo), misure di gravità (essendovi relazione tra schiacciamento α e variazione di gravità tra polo ed equatore), e osservazioni molto accurate delle traiettorie dei satelliti (Pasquarelli, 1987).
Paesi appartenenti a diversi continenti, per ragioni fondamentalmente storiche, hanno adottato nel tempo particolari ellissoidi geodetici di riferimento, aventi ciascuno dei parametri a e α caratteristici.
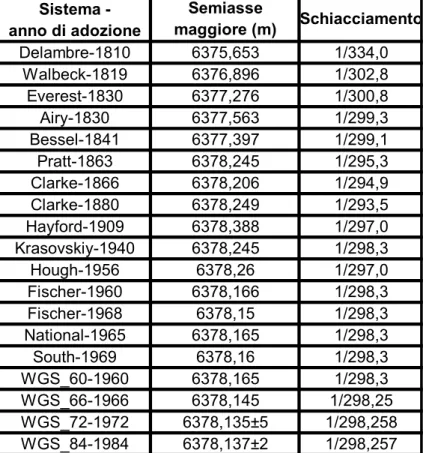
La tabella 2.4 elenca alcuni tra i principali ellissoidi di riferimento, l’anno di adozione, e per ognuno i rispettivi semiasse equatoriale e schiacciamento.
Delambre-1810 6375,653 1/334,0 Walbeck-1819 6376,896 1/302,8 Everest-1830 6377,276 1/300,8 Airy-1830 6377,563 1/299,3 Bessel-1841 6377,397 1/299,1 Pratt-1863 6378,245 1/295,3 Clarke-1866 6378,206 1/294,9 Clarke-1880 6378,249 1/293,5 Hayford-1909 6378,388 1/297,0 Krasovskiy-1940 6378,245 1/298,3 Hough-1956 6378,26 1/297,0 Fischer-1960 6378,166 1/298,3 Fischer-1968 6378,15 1/298,3 National-1965 6378,165 1/298,3 South-1969 6378,16 1/298,3 WGS_60-1960 6378,165 1/298,3 WGS_66-1966 6378,145 1/298,25 WGS_72-1972 6378,135±5 1/298,258 WGS_84-1984 6378,137±2 1/298,257 Sistema - anno di adozione Semiasse maggiore (m) Schiacciamento
Tabella 2.4: principali superfici ellissoidiche di riferimento (dal sito internet http://www.analisidifesa.it). L’ellissoide WGS 84, la cui sigla WGS sta per World Geodetic System e 84 corrisponde all’anno di adozione (1984 per l'appunto), è stato definito dalla Defense Mapping Agency (DMA) statunitense, come il Datum geodetico globale.
Il WGS 84 è il sistema di riferimento globale più ampiamente usato in quanto è quello a cui si riferiscono le coordinate satellite GPS.
La rappresentazione cartografica, o proiezione, stabilisce la corrispondenza biunivoca tra i punti presenti sulla superficie che si intende rappresentare, detta obiettiva, e quelli omologhi raffigurati su un'altra superficie di rappresentazione, definita subiettiva.
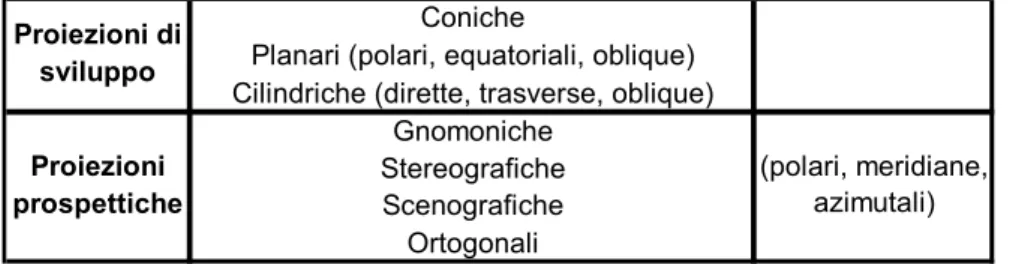
La tabella 2.5 elenca alcuni sistemi di proiezione distinti nelle due categorie: 1. proiezioni di sviluppo;
Le prime sfruttano come superfici subiettive delle figure curve sovrapponibili su di un piano (il cono, o il cilindro). I sistemi di proiezione che utilizzano il cilindro, come quelli di Mercatore, prendono il nome di diretti o traversi quando esso è rispettivamente tangente all’Equatore, o a uno dei meridiani.
Le proiezioni prospettiche utilizzano specifici punti di vista, la cui posizione determina il nome della rappresentazione (ad esempio quella gnomonica è caratterizzata dal fatto che il punto di vista coincide col centro della terra), per proiettare la superficie obiettiva su un piano tangente a un determinato punto della superficie terrestre (ad esempio, il Polo Nord).
Coniche
Planari (polari, equatoriali, oblique) Cilindriche (dirette, trasverse, oblique)
Gnomoniche Stereografiche Scenografiche Ortogonali Proiezioni di sviluppo Proiezioni prospettiche (polari, meridiane, azimutali)
Tabella 2.5: schematizzazione di alcune tipologie di proiezioni cartografiche (Federici, 1984). Le proiezioni possono essere classificate anche in base alle deformazioni, infatti tra le rappresentazioni più diffuse possiamo annoverare quelle conformi, caratterizzate dal fatto che conservano le misure angolari.
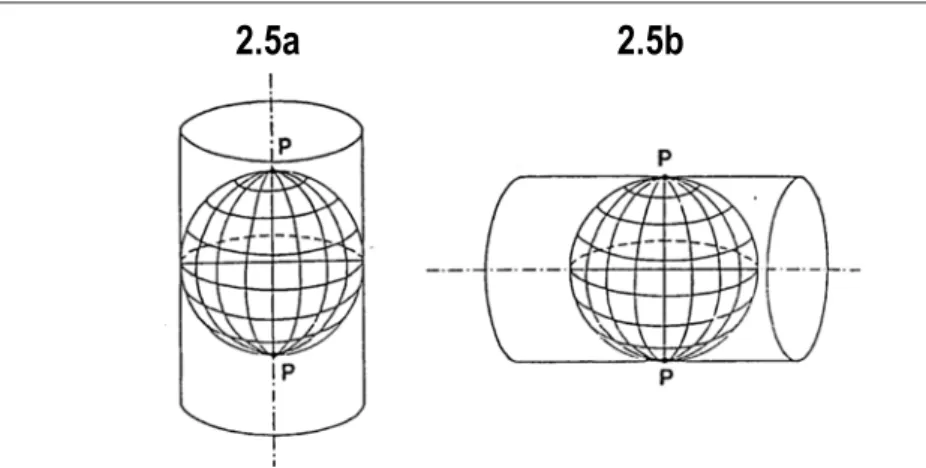
Fra le rappresentazioni conformi più diffuse meritano particolare interesse la proiezione di Mercatore nelle sue due varietà, diretta e traversa, i cui elementi essenziali sono stati riportati nelle figure 2.5a e 2.5b rispettivamente.
La figura 2.5a illustra la proiezione della superficie oggettiva sopra la superficie laterale di un cilindro tangente all’Equatore terrestre (da un punto di vista situato al centro della Terra). Tale figura viene poi sviluppata in piano.
La variante traversa di figura 2.5b, conosciuta anche come proiezione di Gauss, si distingue dalla precedente perché il cilindro è tangente a un meridiano (definito meridiano centrale), anziché all’Equatore.
Figure 2.5a e 2.5b: raffigurazione schematica delle proiezioni diretta e trasversa di Mercatore rispettivamente.
La proiezione UTM è stata sistematicamente impiegata per la rappresentazione cartografica della superficie terrestre compresa tra i paralleli + 80° e – 80° di latitudine. La porzione di Terra suddetta è stata ripartita in 60 fusi dell’ampiezza, in longitudine, di 6° ciascuno.
La numerazione di ogni fuso ha inizio dall’antimeridiano di Greenwich (Londra) e procede verso est. Tale circostanza definisce pertanto non un sistema UTM, bensì 60 diversi sistemi autonomi (Tomaselli).
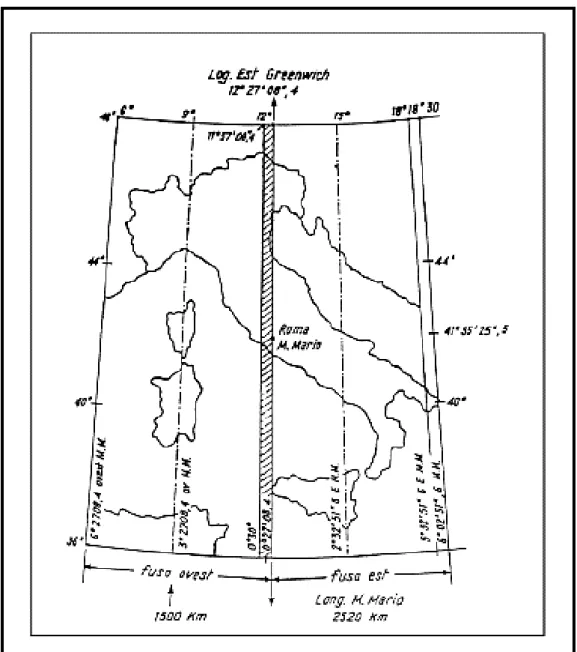
A titolo esemplificativo di quanto sopra menzionato, si osservi la figura 2.6 relativa al sistema cartografico italiano: il territorio nazionale risulta quasi tutto compreso tra i fusi 32 e 33. La proiezione è basata sulla rappresentazione conforme di Gauss adattata alla situazione italiana, sulla base degli studi sviluppati da G. Boaga.
I 60 fusi sono stati suddivisi in 20 fasce parallele, dieci per i due emisferi, distanti 8° di latitudine l’uno dall’altro.
Il sistema di fusi e fasce ha permesso di ricoprire la superficie terrestre, compresa tra le latitudini 80 nord e 80 sud, con una griglia composta da 1200 zone dell’ampiezza di 6° in longitudine e 8° in latitudine ciascuna.
Il meridiano centrale di ogni fuso corrisponde alle ordinate, mentre l’Equatore definisce l’asse delle ascisse alla cui origine (falsa origine) è stato attribuito un valore convenzionale di 500 Km (Tomaselli).
2.3. Fasi della rettifica
Le immagini Landsat, impiegate per lo studio delle aree incendiate nella Provincia di Pisa, presentano i formati digitali e i sistemi di riferimento elencati nella tabella 2.3.
In questo lavoro è stato scelto come ellissoide geodetico di riferimento il WGS 84 (fuso 32) poiché è il sistema internazionale, su cui si basano i dispositivi satellitari di localizzazione GPS, che si sta diffondendo a livello mondiale.
Il passaggio dal modello geodetico – cartografico Clarke 1866 – UTM (fuso 32) a quello WGS 84 – UTM (fuso 32), ha richiesto l’operazione di ortorettifica delle immagini e delle carte tematiche a disposizione. A tal proposito vale la pena ricordare che la superficie ellissoidica è la figura che approssima la forma terrestre la cui proiezione sul piano subiettivo, secondo specifiche equazioni vincolate al sistema di rappresentazione prescelto, permette di ottenere la carta.
Il cambiamento dell’ellissoide geodetico di riferimento, e/o il passaggio da un sistema di proiezione a un altro, compromettono l’accuratezza tra determinate proprietà della carta come la conservazione delle distanze, degli angoli e delle superfici.
I punti di un’immagine, rappresentata con un determinato modello cartografico, sono localizzabili mediante un sistema di coordinate mappa. Tale sistema utilizza una coppia di valori X e Y che identificano, rispettivamente, le colonne e le righe di una specifica griglia di riferimento.
La rettifica delle immagini digitali, consiste nel cambiare il dato di partenza usando una trasformazione geometrica che permette di passare da un sistema griglia iniziale, a un altro scelto dall’utente.
La rettifica eseguita su immagini raffiguranti solo zone pianeggianti, non necessita dei relativi dati di quota contenuti nel modello di elevazione digitale (DEM) dell’area analizzata.
Il DEM è un’immagine raster in cui i valori di brillantezza di ciascun pixel corrispondono ad una determinata quota altimetrica. In un DEM a gradazioni di grigio, ad esempio, le zone chiare o bianche sono quelle più alte, mentre le aree scure o nere sono quelle prossime al livello del mare; la figura 2.7 presenta il DEM della Toscana in toni di grigio.
Figura 2.7: DEM della Toscana a 8 bit (255 livelli di grigio), la risoluzione spaziale è di 40 m (Istituto Nazionale di Geofisica e Vulcanologia).
L’utilizzo del DEM, tuttavia, è quasi sempre necessario poiché negli studi di telerilevamento si vanno ad analizzare porzioni relativamente estese di territorio (le immagini Landsat, ad esempio, rappresentano aree ampie 170 x 185 Km, vedi http://www.esa.int/), per cui è possibile che nella stessa scena compaiano zone pianeggianti intervallate da rilievi.
Qualora l’area d’interesse presenti zone pianeggianti e/o montuose, è indispensabile che il programma di trasformazione della griglia esegua il calcolo delle nuove coordinate
considerando i dati di quota contenuti nel DEM. Così facendo, vengono ridotte al minimo le possibili distorsioni dovute alle variazioni di altezza tra un pixel e quello adiacente (relief displacement). In suddetti casi l’operazione di rettifica prende il nome di ortorettifica.
La rettifica e l’ortorettifica delle immagini implicano anche la loro georeferenziazione, dal momento che tutti i sistemi di proiezione di mappe sono associati a coordinate geografiche. Questa operazione produce solo il cambiamento dell’informazione relativa alle coordinate, infatti la griglia dell’immagine rettificata rimane inalterata (Erdas Imagine 8.5).
Il procedimento di rettifica si basa sul riconoscimento dei Ground Control Points (punti di controllo a terra o più brevemente GCPs) in una Landsat già georeferenziata nel sistema geodetico – cartografico prescelto, e sulla successiva trasposizione di tali punti su un'altra immagine da georeferenziare.
Una volta note le coordinate di riferimento dei GCPs, Xi Yi, è stato usato il
programma Erdas Imagine 8.5 per attribuire a ciascun pixel dell’immagine da trasformare una coppia di valori di output Xo Yo calcolata attraverso equazioni polinomiali di primo
grado (vedi testo a seguire). I coefficienti di tali equazioni sono estrapolati da una specifica matrice di trasformazione la cui descrizione esula dagli scopi di questo studio.
Durante la rettifica delle immagini Landsat sono state utilizzate le ortofoto AIMA, messe a disposizione dall’Istituto Nazionale di Geofisica e Vulcanologia, per localizzare accuratamente i GCPs.
Le AIMA sono fotografie aeree acquisite a una quota inferiore ai 2000 m, e aventi una risoluzione spaziale di 1 m. Queste foto interessano quasi tutta la superficie del territorio italiano, tuttavia, poiché l’ambito di studio di questa tesi è la provincia di Pisa, sono state prese in considerazione solamente quelle relative alla Toscana.
Le fasi seguite nella procedura di georeferenziazione, discusse in questo paragrafo, sono elencate di seguito:
1. omogeneizzazione delle immagini Landsat e del DEM della regione Toscana; 2. individuazione di un congruo numero di Ground Control Points;
3. ortorettifica e rettifica delle Landsat;
Fase 1: omogeneizzazione delle immagini Landsat e del DEM della regione Toscana.
In questa fase preliminare le immagini Landsat sono state convertite dai formati digitali elencati nella tabella 2.3 a quello «.img» riconosciuto dal programma Erdas Imagine 8.5 che è stato usato per la rettifica delle immagini.
Una analoga operazione di conversione del formato è stata necessaria per il DEM della regione Toscana, affinché potesse essere elaborato mediante lo stesso software di cui sopra.
Fase 2: individuazione dei Ground Control Points.
La seconda fase della procedura di georeferenziazione è stata incentrata sulla ricerca di un set di 17 GCPs in modo da garantire un’adeguata copertura del territorio provinciale.
E’ importante, ma non indispensabile, che i GCPs siano ben distribuiti all’interno dell’immagine da rettificare poiché, così facendo, si riduce la possibilità che nella stessa scena vi siano porzioni più distorte di altre, al termine della trasformazione.
Il numero dei GCPs dipende dal grado delle equazioni polinomiali usate dal programma (nella fattispecie Erdas Imagine 8.5) per calcolare la nuova posizione dei pixels.
Una rettifica di primo grado, ad esempio, implica l’utilizzo di minimo tre GCPs , ma generalmente viene consigliato di sceglierne un numero maggiore per ottenere dei risultati migliori (Erdas Imagine 8.5).
La scelta di un buon numero di GCPs permette, nella fase finale della rettifica, di eliminare quei punti aventi un RMS error superiore a due pixels (vedi fase 3). Tale accorgimento spesso abbassa il parametro RMS error totale al di sotto della soglia di 60 m accettabile per la scala delle immagini Landsat TM ed ETM (1:500.000 ~ 1:200.000) (Erdas Imagine 8.5). Più sono i GCPs, maggiore sarà la copertura della scena da rettificare nonostante l’eliminazione di alcuni di essi sulla base dei criteri di cui sopra.
Le trasformazioni di primo grado si applicano generalmente quando è necessario cambiare il sistema di rappresentazione di un’immagine piana.
Equazioni polinomiali di grado superiore vengono sfruttate in situazioni particolari come quella della rettifica di un’immagine relativa a una vasta area della Terra. In questo
caso specifico occorre un polinomio di secondo grado per considerare anche l’effetto della curvatura terrestre sulla posizione delle coordinate d’uscita (Erdas Imagine 8.5).
La tabella 2.6 pone a confronto alcuni possibili risultati ottenibili impiegando, nell’operazione di rettifica, le equazioni polinomiali di primo e di secondo grado (Erdas Imagine 8.5).
Grado del
polinomio Immagini originali Risultato 1 Risultato 2
Trasformazione lineare
Trasformazione Non lineare
Tabella 2.6: confronto tra i possibili risultati derivanti dall’applicazione di equazioni polinomiali di primo e di secondo grado rispettivamente (Erdas Imagine 8.5).
In questa tesi le immagini Landsat a disposizione sono state dapprima ortorettificate nel sistema WGS 84 per uniformare i dati al modello di proiezione internazionale usato per i GPS. In un secondo momento, al fine di effettuare analisi spettrali su specifici gruppi di pixels, tutte le scene di interesse sono state rettificate sulla Landsat contenente i due incendi di riferimento “01_07” e “01_08” discussi nel capitolo 4.
Ogni punto di controllo a terra, sull’immagine da ortorettificare, è stato individuato anche sulle relative ortofoto AIMA messe a disposizione dall’ Istituto Nazionale di Geofisica e Vulcanologia. Queste immagini sono già georeferenziate nel sistema WGS 84 – UMT (fuso 32).
La trasposizione dei GCPs sulle ortofoto, a causa della differenza tra la risoluzione spaziale delle Landsat e quella delle AIMA, ha reso necessaria la ricerca dei punti
omologhi in strutture che avessero dimensioni maggiori di un pixel (30 x 30 m), come ad esempio: fabbriche, grandi pontili, aeroporti, grossi incroci stradali, dighe, etc. Questo perché la risoluzione spaziale del TM è significativamente inferiore rispetto a quella delle foto aeree (i valori della risoluzione spaziale sono riportati, per ciascuna banda nella tabella 2.1).
Fase 3: ortorettifica e rettifica delle immagini.
Alla base delle operazioni di ortorettifica e rettifica vi è una matrice di trasformazione i cui coefficienti sono calcolati a partire dai GCPs individuati nella fase 2.
La matrice suddetta, la cui dimensione dipende dall’ordine della trasformazione scelta dall’utente, è formata da coefficienti che vengono sostituiti in equazioni polinomiali per la conversione delle coordinate di input (Xi , Yi), in nuovi valori di output (Xo , Yo).
La scelta dei GCPs è di estrema importanza in quanto condiziona la matrice di cui sopra, e conseguentemente i risultati ottenuti applicando i polinomi per il calcolo delle coordinate trasformate. L’accuratezza di questa operazione può essere valutata, infine, attraverso il parametro RMS error totale.
L’RMS error totale, la cui espressione matematica è riportata nell’equazione 2.3, rappresenta la distanza tra le coppie di valori (Xi , Yi) e (Xo , Yo) mediata su tutti i GCPs
scelti. Questo parametro, usato per valutare l’accuratezza della posizione dei punti calcolati (Xo , Yo), viene espresso come una distanza coerente al sistema di coordinate in entrata:
pixel o metri.
Nella presente tesi, in accordo con le linee guida di Erdas Imagine 8.5, è stata scelta una soglia di accuratezza di 2 pixel (corrispondenti a 60 m lineari), ciò significa che se tra il punto iniziale e quello trasformato vi era una distanza inferiore a 2 pixel, la rettifica è stata ritenuta accettabile.
(
)
(
)
∑
=−
+
−
=
n p p i o p i o RMSX
X
Y
Y
n
T
1 2 21
In questo studio sono state impiegate le equazioni polinomiali di primo grado, o affini, rappresentate nell’equazioni 2.4. I coefficienti a1, a2, a3, b1, b2 e b3, derivano dalla matrice di trasformazione la cui discussione esula dagli scopi di questo lavoro.
i i
b
Y
X
b
b
X
0=
1
+
2
⋅
+
3
⋅
i ia
Y
X
a
a
Y
0=
1
+
2
⋅
+
3
⋅
Equazioni 2.4: sistema polinomiale di primo grado (Erdas Imagine 8.5). Fase 4: ricampionamento
L’ultimo passaggio della procedura di ortorettifica consiste nel ricampionare i valori di radianza dei pixels trasformati in base a un determinato algoritmo (Erdas Imagine 8.5). Questa operazione si rende necessaria in quanto i pixels si trovano in una posizione più accurata, ma contengono un digital number (DN) che non corrisponde più alla luminosità della scena originale.
La stima dei nuovi valori di radianza viene effettuata mediante delle procedure di interpolazione matematica, dette tecniche di ricampionamento, tra cui quelle riportate da Erdas Imagine 8.5 sono:
• Nearest neighbour • Bilinear interpolation • Cubic convolution
L’algoritmo nearest neighbour è stato utilizzato in questa tesi perché ha la particolarità di utilizzare i DN originari senza modificarli.
La tecnica suddetta, infatti, assegna il DN del pixel originale a quello trasformato che ha le coordinate di riga e colonna più vicine al primo. Tale operazione ha un’accuratezza geometrica dell’ordine del ½ pixel.
A titolo di esempio, se da una trasformazione geometrica affine si ottengono le coordinate finali di un pixel generico: “Xo = 4,37” e “Yo = 15,75”, il valore di radianza di
tale pixel sarà uguale a quello avente coordinate di riga “M = 16” e di colonna “N = 4”, nell’immagine originale.