MISURA DELLE FORZE
ROTODINAMICHE
6.1 Esplicitazione delle misure
La determinazione sperimentale della matrice di calibrazione (v. Cap. 5), permette di ricavare le sollecitazioni agenti sul dinamometro dalla misura dei potenziali di sbilanciamento dei ponti estensimetrici. In particolare, considerando il k-esimo campionamento, il sistema di acquisizione dati restituisce il vettore delle misure V(k) = (v1(k), v (k), v (k),…, v (k)), dal quale, in linea teorica, si può
Dove la matrice dovrebbe essere l’inversa della matrice di calibrazione . La matrice di calibrazione è però rettangolare, a causa della ridondanza dei ponti estensimetrici (10) nella misura delle caratteristiche di sollecitazione (6), pertanto non può essere invertita. Inoltre, a seguito dei risultati sperimentali ottenuti (v. Cap. 5), si preferisce separare dalle altre la misura della forza lungo l’asse z del dinamometro.
Allora, anziché utilizzare la (5.1), il calcolo del vettore delle sollecitazioni applicate viene effettuato da un lato tramite una semplice relazione scalare del tipo: 9 96 1 v a Fz ⋅ = oppure 10 106 1 v a Fz ⋅ =
per la componente normale e dall’altro tramite l’analisi numerica per le restanti 5 componenti. Per queste ultime, infatti, in assenza di errori di misura, il vettore “ridotto” delle sollecitazioni FR =(Fx , Fy , Mx , My , Mz ) è soluzione dell’equazione: 0 = ⋅ − R R R A F V
dove VR è il vettore dei segnali provenienti dai primi otto ponti estensimetrici,
mentre è la matrice di calibrazione “ridotta” ottenuta eliminando la riga e le due colonne di relative rispettivamente alla misura di Fz e ai segnali dei ponti 9 e 10. In pratica FR può essere approssimato dal vettore che minimizza l’errore quadratico, ovvero:
(
)
0min R − R⋅ R 2 =
FR V A F
Operativamente questo si traduce nella determinazione del vettore b soluzione del sistema lineare:
c b H⋅ = ) ( ) (k C V k F = ⋅ C A ( 6.1 ) ( 6.2 ) ( 6.3 ) R A A ( 6.4 ) ( 6.5 )
dove: R T R A A H = ⋅ R R V A c= ⋅
Si noti che la matrice è quadrata di dimensioni 5x5. I dettagli della procedura numerica sono riportati in Appendice C, in Appendice E si può invece esaminare il listato MatLab impiegato nell’esecuzione dell’algoritmo.
Questa tecnica di estrazione della misura delle sollecitazioni offre i seguenti vantaggi:
la ridondanza dei ponti è mantenuta inalterata e con essa l’accuratezza delle
misure;
il vettore può essere usato per la diagnosi di eventuali
malfunzionamenti dei primi otto ponti o di deriva nella misura;
la procedura mantiene la sua validità di impiego anche assumendo (qualora
fosse necessario) una legge di dipendenza dei segnali dai carichi applicati di ordine superiore del tipo:
F D F F A V = ⋅ + ⋅ ⋅
6.2 Estrazione della forza radiale e della forza
rotodinamica
Le forze fluidodinamiche agenti sul rotore possono essere scomposte nella somma della forza radiale e della forza rotodinamica:
RD
F F F = 0 +
Come già visto (v. Cap. 3), la forza rotodinamica è funzione dell’eccentricità,ε , e si può esplicitare secondo la (3.1):
ε ⋅ = A FRD H R R R A F V r = − ⋅ ( 6.6 ) ( 6.7 ) ( 6.8 ) ( 6.9 ) ( 6.10 )
In una trattazione di carattere generale si introducono i seguenti sistemi di riferimento rappresentati in figura 6.1:
X V Y V x γ = Ω t ′ O β ε y X Y O lingua della voluta ϑ = ω t xR y T
Figura 6.1 – Sistemi di riferimento utilizzati per la riduzione delle misure sperimentali
Dove:
O, X; Y, Z è il sistema di riferimento laboratorio (fisso);
O, XV, YV, ZV è il sistema di riferimento voluta (anch’esso fisso, ma ruotato
di un angolo β rispetto al precedente e con l’asse XV passante per la lingua della voluta);
O’, x, y, z è il sistema di riferimento dinamometro (solidale ad esso e quindi
rotante con velocità angolare Ω e con velocità di precessione ω);
O’, xR, yT, z è il sistema di riferimento eccentrico (anch’esso relativo, ma
dotato del solo moto di precessione angolare ω).
γ e θ sono gli angoli di cui sono ruotati i sistemi di riferimento
dinamometro ed eccentrico rispetto al sistema laboratorio. Supponendo che all’istante iniziale essi abbiano assi x e xR paralleli all’asse X del sistema
laboratorio, valgono le relazioni seguenti: ⋅ Ω = ⋅ = t t γ ω θ ( 6.11 )
Le componenti della forza F nei diversi sistemi di riferimento sono:
Fx ed Fy rispetto al sistema di riferimento dinamometro; FXv ed FYv rispetto al sistema di riferimento voluta; FX ed FY rispetto al sistema di riferimento laboratorio.
Per poter passare, rispettivamente, dai sistemi di riferimento dinamometro e voluta al sistema laboratorio si devono utilizzare le relazioni seguenti:
( )
( )
( )
( )
Ω + Ω = Ω − Ω = t F t F F t F t F F y x Y y x X cos sin sin cos + = − = β β β β cos sin sin cos V V V V Y X Y Y X X F F F F F FL’eccentricità dell’asse del rotore e la matrice di rigidezza hanno le seguenti componenti rispetto al sistema di riferimento dinamometro:
= Y X ε ε ε = yy yx xy xx A A A A A
La matrice di rigidezza generalizzata è, tra le altre cose, funzione della geometria del rotore e dello statore, e delle velocità angolari Ω e ω.
La forza fluidodinamica F viene misurata dal dinamometro in termini delle sue
componenti Fx ed Fy e quindi nella (3.1)
) ( ) ( ) (t F0 t A t F = + ⋅ε ( 6.12 ) ( 6.13 ) ( 6.14 ) ( 6.15 ) ( 3.1 )
che ne rappresenta un’espressione come somma della forza radiale e di quella rotodinamica, le incognite sono le due componenti di F0 e gli elementi di . Sebbene i valori istantanei delle grandezza incognite possano essere di rilevante importanza, si è soprattutto interessati a valutare i valori medi di tali grandezze, rappresentative del comportamento del rotore in un opportuno intervallo di tempo ciclico TC, durante il quale le grandezze incognite vengono assunte periodiche. I valori mediati risultano così filtrati dal rumore e dai possibili disturbi che casualmente possono essersi presentati durante l’acquisizione dei dati. Affinché questo sia possibile è necessario che i periodi di rotazione e di precessione dell’albero: Ω = 2π T e ω π τ = 2
abbiano un minimo comune multiplo. Infatti, in questo modo si può scegliere TC in modo tale che:
τ
n mT
TC = =
da cui segue che:
m n T = Ω =ω τ
dove le variabili intere sono le stesse usate dal sistema di controllo dei motori per impostare le velocità angolari di questi ultimi. Senza ledere la generalità del caso, si pone la condizione m>0, mentre n può essere maggiore, uguale o minore di zero. Si possono così distinguere i seguenti casi (v. Cap. 3):
n>0 – whirl positivo; n<0 – whirl negativo;
n < m - whirl subsincrono (positivo o negativo); n = m - whirl sincrono (positivo o negativo);
A
( 6.16 )
( 6.17 )
n > m - whirl supersincrono (positivo o negativo).
Introducendo nella (3.1) le seguenti espressioni per le componenti di F secondo la (6.12) ed ε rispetto al sistema di riferimento laboratorio:
( )
( )
= = t t Y X ω ε ε ω ε ε sin cos si ottiene:( ) ( )
( ) ( )
( )
( )
( ) ( )
( ) ( )
( )
( )
+ + = Ω + Ω + + = Ω − Ω t A t A F t t F t t F t A t A F t t F t t F YY YX Y y x XY XX X y x ω ε ω ε ω ε ω ε sin cos cos sin sin cos sin cos 0 0Le componenti di F rilevate dal dinamometro possono essere sviluppate in serie di Fourier come segue:
( )
( ) ( ) ( )( )
( ) ( ) ( ) Ω + Ω + = Ω + Ω + =∑
∑
∞ = ∞ = 1 0 1 0 sin cos 2 1 sin cos 2 1 k F k F k F y k F k F k F x m t k b m t k a a t F m t k b m t k a a t F y y y x x xdove Ω/ω è la frequenza di riferimento e dove i coefficienti dello sviluppo sono:
( )
( )
( )( )
( )( )
( )( )
Ω = Ω = Ω = Ω =∫
∫
∫
∫
C y C y C x C x T y C F k T y C F k T x C F k T x C F k dt m t k t F T b dt m t k t F T a dt m t k t F T b dt m t k t F T a 0 0 0 0 sin 1 cos 1 sin 1 cos 1Posto α = Ω t/m ed introducendo la (6.21) nella (6.20), si ricava:
( 6.19 )
( 6.20 )
( 6.21 )
( )
[
( )( )
( )( )
]
( )
+ +∑
∞ + = α α α b k m k a a k F k F kFx x sin x cos cos
2 1 1 0 ( )
[
( )( )
( )( )
]
( )
( )
α ε( )
α ε α α α n A n A F m k b k a a XY XX X k F k F k Fy y y sin cos sin cos sin 2 1 0 1 0 + + = = + + −∑
∞ = e ( )[
( )( )
( )( )
]
( )
+ +∑
∞ + = α α α b k m k a a k F k F kFx x sin x cos sin
2 1 1 0 ( )
[
( )( )
( )( )
]
( )
( )
α ε( )
α ε α α α n A n A F m k b k a a YY YX Y k F k F k Fy y y sin cos cos cos sin 2 1 0 1 0 + + = = + + +∑
∞ =Le componenti della forza radiale e gli elementi della matrice di rigidezza generalizzata si ottengono moltiplicando le (6.23) per opportune funzioni trigonometriche di α e sfruttando le proprietà di ortogonalità degli integrali di prodotti di cos(x) e sin(x) nell’intervallo [0,2π]. In questa operazione di riduzione vengono usate le seguenti quantità, il cui calcolo è riportato in Appendice D:
(
)
( ) ( )
≠ ≠ ↔ ≠ − = ↔ − ≠ = ↔ = = ↔ = =∫
0 0 0 0 0 0 sin sin , 2 0 1 n m m n m n m n d n m n m l π π α α α π(
)
( ) ( )
≠ ≠ ↔ ≠ − = ↔ ≠ = ↔ = = ↔ = =∫
0 0 0 0 0 2 cos cos , 2 0 2 n m m n m n m n d n m n m l π π π α α α π(
m n)
( ) ( )
m n d m n l , 2 sin cos 0 , 0 3 =∫
= ↔∀ π α α αInfine, attraverso passaggi matematici anch’essi riportati in Appendice D, si ottengono i seguenti risultati:
( 6.23a )
( 6.23b )
( 6.24a )
( 6.24b )
componenti di F0 , ∀ m, n : ( ) ( )
(
)
( ) ( )(
)
+ = − = y x y x F m F m Y F m F m X b a F a b F 2 1 2 1 0 0 componenti di : ( ) ( )(
)
( ) ( )(
)
= + = = − = 0 2 1 0 2 1 YY F m F m YX XY F m F m XX A b a A A a b A y x y x ε per n = 0 ( ) ( ) ( )(
)
( ) ( ) ( )(
)
( ) ( ) ( )(
)
( ) ( ) ( )(
)
− + = + + = + + − = − + = x y x y x y y x y y x x F m F m F YY F m F m F YX F m F m F XY F m F m F XX b a a A b a a A b a a A a b a A 2 2 0 2 2 0 2 2 0 2 2 0 2 1 2 1 2 1 2 1 ε ε ε ε per n = m ( ) ( ) ( )(
)
( ) ( ) ( )(
)
( ) ( ) ( )(
)
( ) ( ) ( )(
)
− + − = + + = − − = − + = y x x y x y x y y y x x F m F m F YY F m F m F YX F m F m F XY F m F m F XX a b a A b a a A a b a A a b a A 2 2 0 2 2 0 2 2 0 2 2 0 2 1 2 1 2 1 2 1 ε ε ε ε per n = -m A ( 6.25a ) ( 6.25b ) ( 6.25c ) ( 6.25d )( ) ( ) ( ) ( )
(
)
( ) ( ) ( ) ( )(
)
( ) ( ) ( ) ( )(
)
( ) ( ) ( ) ( )(
)
− + + − = + + + = − − + = − + − = − − + + − + − + − − + + − − + + y x y x y y x x x y x y y x y x F n m F n m F n m F n m YY F n m F n m F n m F n m YX F n m F n m F n m F n m XY F n m F n m F n m F n m XX a b a b A b b a a A a b a b A a b a b A ε ε ε ε 2 1 2 1 2 1 2 1 per n < m ( ) ( ) ( ) ( )(
)
( ) ( ) ( ) ( )(
)
( ) ( ) ( ) ( )(
)
( ) ( ) ( ) ( )(
)
− + + = + + − = + − + = + + − = + − + − + − − + + − + − − − + + x x y y y y x x y y x x y x y x F n m F m n F n m F m n YY F n m F m n F m n F n m XY F n m F m n F n m F m n XY F m n F m n F n m F n m XX b b a a A b b a a A b b a a A a b a b A ε ε ε ε 2 1 2 1 2 1 2 1 per n > mIn Appendice E si può esaminare il programma in linguaggio MatLab per il calcolo delle componenti come illustrato nelle (6.25). Il calcolo dei singoli coefficienti di Fourier è svolto impiegando la formula dei trapezi. E’ importante notare che prima di procedere al calcolo vero e proprio è necessario effettuare alcune operazioni preliminari, quali la media della storia temporale dei carichi per ottenerne il valore nominale per il singolo periodo τ e la sottrazione delle forze tara dai valori misurati, ovvero quelle forze che non si vogliono misurare, ma che inevitabilmente vengono rilevate dal dinamometro. Tra di esse figurano la forza peso delle masse sospese al dinamometro (pompa e/o induttore) , i carichi inerziali e la spinta di galleggiamento. La valutazione di tali forze deve avvenire in separata sede rispetto alle prove in cui si vogliono misurare le forze rotodinamiche, inoltre, per poterle sottrarre correttamente, è necessaria la sincronizzazione del sistema di acquisizione dati con il sistema di controllo dei motori, garantita sia dal controllo dei due motori (vedi Cap. 4), che dall’uso di sensori si prossimità.
La misura delle forze peso si può ottenere da una prova statica asciutta, cioè senza che il circuito sia riempito del fluido di lavoro, il valore nelle medesime verrà sottratto dalla misura effettiva via software note le condizioni di velocità Ω, eccentricità ε, e velocità di whirl ω. Anche la spinta di galleggiamento viene
( 6.25e )
sottratta dalle misure della prova rotodinamica via software, una volta che essa sia stata misurata in una prova statica come differenza tra i segnali misurati in condizioni asciutte e in condizioni bagnate, poiché essa è una forza rotante con velocità - Ω rispetto al sistema di riferimento dinamometro. Infine, i carichi inerziali vengono calcolati in funzione delle due velocità (rotazione e precessione) e anch’essi sottratti via software.
6.3 Primi risultati sperimentali
Sebbene una serie di fattori concomitanti abbianoo impedito di effettuare una prima campagna di prove sperimentali dello strumento montato nella CPRTF, è comunque stato possibile svolgere qualche prova statica per sincerarsi della bontà dei risultati ottenuti nella calibrazione e per verificare il metodo di esplicitazione delle misure.
6.3.1 Prova statica
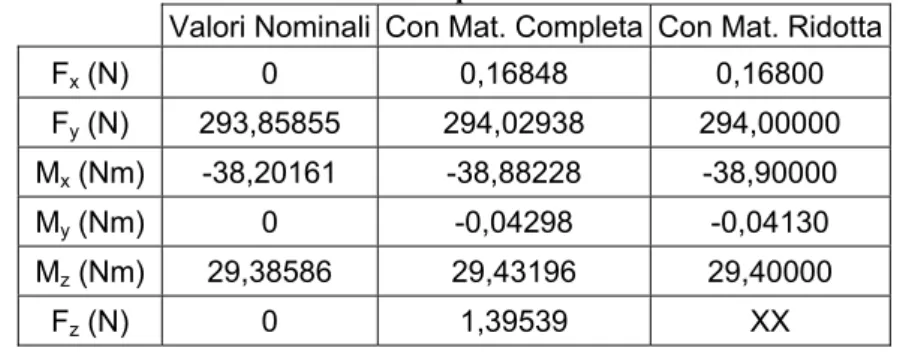
Nelle tabelle 6.1 e 6.2 è possibile esaminare un confronto tra i risultati sperimentali nella misura di un carico applicato ed il suo valore nominale, per dinamometro spoglio e in presenza del coperchio protettivo. Si può inoltre vedere la differenza nella misura applicando il metodo di cui alla (6.4) nel caso di impiego dell’intera matrice di calibrazione sperimentale e in quello della sua versione ridotta.
Tabella 6.1 – Confronto tra i risultati sperimentali nella prova statica. Dinamometro senza coperchio.
Valori Nominali Con Mat. Completa Con Mat. Ridotta Fx (N) 0 0,16848 0,16800 Fy (N) 293,85855 294,02938 294,00000 Mx (Nm) -38,20161 -38,88228 -38,90000 My (Nm) 0 -0,04298 -0,04130 Mz (Nm) 29,38586 29,43196 29,40000 Fz (N) 0 1,39539 XX
Tabella 6.1 – Confronto tra i risultati sperimentali nella prova statica. Dinamometro con coperchio.
Valori Nominali Con Mat. Completa Con Mat. Ridotta Fx (N) 0 -0,47100 -0,46577 Fy (N) -293,85855 -295,00000 -294,68418 Mx (Nm) 38,20161 38,20000 38,20234 My (Nm) 0 0,08530 0,08437 Mz (Nm) 29,38586 29,50000 29,50788 Fz (N) 0 2,60000 XX
Come si vede, sensibilità e precisione dello strumento si confermano piuttosto buone anche nel caso di presenza del coperchio, con sensibilità intorno ad 1 N per le forze ed 1 Nm per i momenti.