Prove meccaniche
4.1
Modelli bio-meccanici
Tutti i prototipi realizzati, come visto ampiamente nei paragrafi precedenti, sono composti da una struttura rigida interna circondata da due strati di materiali siliconici aventi caratteristiche visco-elastiche assimilabili a quel-le dei tessuti molli del corpo umano, come dimostrato, anche, dall’ampia applicazione di materiali appartenenti a questa classe nell’ambito della chi-rurgia plastica [13],[14],[15]. L’obiettivo fondamentale dell’analisi meccanica a sollecitazione normale dei prototipi realizzati è quello di verificare il livel-lo di aderenza di tale comportamento a quellivel-lo esibito dal modellivel-lo biolivel-logico di riferimento, ovvero dalla parte distale del dito indice umano. I modelli presenti in letteratura, utilizzati per descrivere il comportamento meccanico della parte distale del dito umano, vengono, quindi, applicati anche per la descrizione del comportamento meccanico dei prototipi verificandone prima l’applicabilità.
4.1.1
Modello di Fung per sollecitazione normale
La caraterristica viscoleastica dei prototipi soggetti a sollecitazione normale viene, quindi, descritta, utilizzando il modello di Fung, presente in letteratura come modello principale per la descrizione del comportamento meccanico del polpastrello di dito umano soggetto a sollecitazione normale [16],[9],[17],[18]. L’esistenza dei fenomeni di creep e di relaxation, propria dei materiali visco-elastici, rapprensenta la premessa teorica fondante del modello di Fung, esse sono rispettivamente:
• relaxation: diminuzione nel tempo dello sforzo a cui è soggetto un corpo a cui è applicato una deformazione idealmente istantanea δ0 che viene,
poi, tenuta stabile nel tempo:
F (t) = Ψ(δ0, t)
• creep: diminuzione nel tempo del livello di deformazione a cui è soggetto un corpo a cui è applicato una certa forza F0 in maniera idealmente
istantanea che viene, poi, tenuta stabile nel tempo: δ(t) = Φ(F0, t)
vediamo, ora, nel dettaglio la descrizione del modello di Fung per il fenomeno di relaxation, quello utile per il tipo di analisi effettuata sui prototipi, tenen-do presente che le medesime argomentazioni varrebbero nel caso di creep invertendo il ruolo delle variabili:
Ψ(δ, t) = F(e)(δ) · g(t) con g(0) = 1 (4.1)
nell’espressione precedente possiamo individuare la funzione F(e)(δ),
que-st’ultima rappresenta la cossidetta risposta elastica, ovvero la funzione che fornisce il valore dell’ampiezza della forza generata istantaneamente da uno spostamento δ; mentre la funzione g(t), rappresenta la cosiddetta funzione di rilassamento che è espressione delle carattetistiche tempo-dipendenti del materiale. In particolare abbiamo che la forza prodotta da uno spostamento infinitesimo dδ(τ), il quale viene imposto in uno stato di spostamento già presente δ ad un certo istante di tempo τ, è per t > τ:
dF (t) = ∂Ψ[δ(τ ), t − τ ]
∂δ dδ(τ ) (4.2)
considerando, quindi, la (4.1) si ottiene: dF (t) = g(t − τ )dF
(e)(t)[δ(τ )]
∂δ dδ(τ ) (4.3)
A questo punto è possibile applicare il principio di sovrapposizione degli effetti cosicchè la forza totale all’istante t è pari alla somma di tutti i contributi precedenti:
F (t) = Z t
0
g(t − τ )K(e)[δ(τ )] ˙δ(τ )dτ (4.4)
dove il termine K(e) = dF (e)[δ]
dδ rappresenta la stiffness elastica, mentre ˙δ(τ) è la velocità di spostamento. Importante notare che il limite inferiore dell’in-tegrale è 0 e non −∞ in quanto si pone come condizione al contorno che il
contatto avvenga ad un tempo t = 0 e che F(e) sia pari a 0 cosi come δ per
t < 0. La funzione di rilassamento g(t) è una funzione decrescente e continua nel tempo pari ad 1 per t = 0, essa corrisponde ad una combinazione lineare di funzioni esponenziali: g(t) = r X i=0 cie−vit con r X i=0 ci = 1 e v0 = 0 (4.5)
bisogna considerare che i parametri ci e vi nonchè il valore di r dipendono
dalle caratteristiche del sistema preso in esame. La risposta elastica non lineare F(e)(δ) può essere espressa, come avviene per la maggior parte dei
tessuti del corpo umano come:
F(e)(δ) = m b (e
bδ− 1) (4.6)
i parametri m e b dell’equazione (4.6) vengono identificati sperimentalmen-te. Inoltre dall’equazione (4.6) è facile ricavare un’espression della stiffness elastica dipendente dai parametri m e b:
K(e)= dF
(e)[δ]
dδ = m + bF
(e)
[δ] (4.7)
Se utilizziamo la funzione (4.5) del rilassamento all’interno della funzione (4.4) possiamo facilmente ricavare due espressioni valide per descivere:
• la curva forza normale-spostamento se imponiamo a partire da t = 0 fino a t = t0 uno spostamento a velocità costante γ (NOTA:δ = γt):
F1(t) = t0 Z 0 ( r X i=0 cie−vit)γmebγtdτ = r X i=0 mγci(ebγt− e−vit) bγ + vi (4.8) • la curva forza normale-spostamento per la fase di rilassamento data dal mantenimento del livello di spostamento raggiunto in seguito all’impo-sizione di uno spostamento a velocità costante γ, quindi per t > t0
: F2(t) = ∞ Z t0 ( r X i=0 cie−vit)γmebγtdτ = r X i=0 mγci(e−vit(e(bγ+vi)t0 − 1) bγ + vi (4.9)
4.2
Piattaforma per le prove
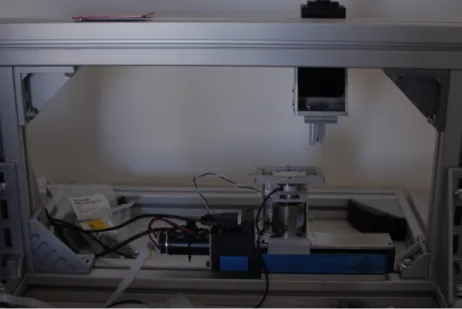
Per l’analisi meccanica del dito umano di riferimento e dei prototipi è stata utilizzata una piattaforma di stimolazione tattile ideata e progettata all’inter-no della Scuola Superiore Sant’Anna(vedi figura 4.1. La piattaforma presenta due gradi dilibertà Cartesiani che le permettono di indentare e di scivolare sul polpastrello di un dito umano o di un eventuale dispotivo che tenta di riprodurne il comportamento e la geometria. L’architettura di controllo della piattaforma è multi-strato e gerarchica, partizionando le operazioni da ese-guire tra un PC su cui sta girando una GUI(LabVIEW, National Instrument, TX, USA)e un hardware a logica programmabile embedded (EP2C35 FPGA, Altera) con moduli di logica hardware custom ed un processore soft-core (Nios II/f) su cui si esegue un controllo con C/C++ e routines di comunicazione per implementare i protocolli sperimentali. Il contatto lungo l’asse d’inden-tazione è controllabile sia in forza che in posizione, mentre il movimento lungo la direzione tangenziale è soggeto ad un cotrollo posizione/velocità.Lo stimolatore tattile servo-controllato consiste di un attuatore voice coil elet-tromagentico lineare(NCC05-18-060-2X, H2W Technologies, CA, USA) che controlla la componente normale della forza di contatto, ed un slitta linea-re(LPT60, SKF, Sweden)con motore DC(RE35, Maxon Motor, Switzerland) che controlla il movimento tangenziale dello stimolo attuato. La posizione della slitta è misurata tramite un encoder connesso all’albero del motore DC(risoluzione di 1 µm per la posizione della slitta). La posizione del voice-coil è misurata tramite un sensore ottico(Tonic T1011-15A, Renishaw). La forza di contatto viene misurata tramite un trasduttore di forza/momento a 6 assi(nano43, ATI, NC, USA). Il piatto per l’indentazione è posizionato sulla testa del voice-coil. I servo-controlli sono implementati da un’amplifica-tore di corrente lineare (LCAM-07-09, Quanser, Canada). La GUI permette all’utilizzatore di controllare l’esecuzione dell’esperimento e di registrare i risultati ottenuti ad una frequenza di campionamento di 100Hz. Il Piatto d’indentazione è un piatto di alluminio(76X36mm2), il piatto è fissato ad
un supporto sullo stimolatore tramite delle viti. Il supporto è attacato al sensore di forza/momento. L’intero sistema è supportato da una struttura rigida in alluminio. I prototipi artificiali vengono fissati con della comune colla a livello dell’unghia tramite interfaccia in materiale di prototipazione rapida a sua volta fissata tramite una vite alla struttura.
Figura 4.1: piattaforma di stimolazione tattile realizzata all’interno dei laboratori della
Scuola Superiore Sant’Anna e utilizzata per le prove di indentazione
4.3
Prove indentazione
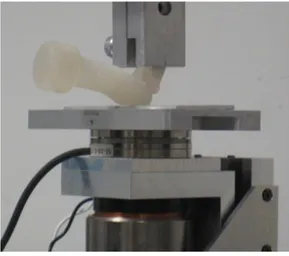
Le prove di indentazione sono state effettuate sia su un campione umano che sui prototipi utilizzando la piattaforma descritta nel paragrafo precedente, dove sulla cella di carico è stato posizionato un piattino di alluminio. Sia il campione umano che i prototipi sono stati fissati a livello dell’unghia tramite opportuna interfaccia alla piattaforma (vedi figura 4.2).
Le prove sul primo prototipo sono state funzionali a verificare la percor-ribilità della linea di sviluppo per i prototipi successivi, nella fattispecie la composizione multi-layer e la scelta dei materiali. Infatti nel primo prototi-po è presente la comprototi-posizione multi-strato con i materiali selezionati, ma la geometria è ancora molto lontana dal modello reale di riferimento, aspetto fondamentale della linea di sviluppo. Nei prototipi successivi al primo dove la geometria si avvicina gradualmente ad un livello di somiglianza a quella del dito umano sempre maggiore, il livello di indentazione applicabile è risul-tato essere molto minore rispetto al primo prototipo analogamente al livello applicabile sul dito umano (NOTA: Le prove sono state effettuate fino ad un livello massimo di indentazione di 1.5mm, eccetto per la prima versione del secondo prototipo (vedi paragrafo 2.1.4 )dove lo spostamento massimo è stato di 0.8mm, questo a causa della riscontrata elevata rigidezza oltre tale valore e per evitare, quindi, un’eventuale rottura dei prototipi in seguito a stress eccessivi). Inoltre sono state utilizzate velocità di deformazione
mas-Figura 4.2: immagine di prototipo fissato alla piattaforma per le prove di indentazione
sime molto più basse rispetto a quelle utilizzate per il primo prototipo, dove la rigidezza massima era molto minore. Infine sono stati sondati due angoli di contatto differenti, cosa non effettuata per il primo prototipo.
4.3.1
rampe
La prova d’indentazione principale, che d’ora in poi identificheremo con il nome rampa, è consistita nell’imposizione di uno spostamento a velocità co-stante in direzione normale alla superficie di contatto del piattino rigido posto inizialmente in contatto con il polpastrello del campione umano e dei pro-totipi. Tale prova dovrebbe essere svolta ad una velocità di spostamento molto elevata, idealmente tendente a ∞, in modo tale da poter trascurare gli effetti tempo-dipendenti e considerare quindi una buona approssimazione del-l’andamento della forza quella data dall’equazione (4.6) ed individuare,poi, i parametri m e b. In realtà l’applicazione di una velocità molto elevata comporterebbe problematiche come onde da shock e forze inerziali che ren-derebbero vana la misurazione della forza. Gli obiettivi della prova sono stati, quindi, i seguenti:
• confrontare le curve, quindi i valori di forza raggiunti e la stiffness, dei prototipi con quelle dei campioni umani
• studiare il fenomeno di iseteri e qundi la dissipazione di energia • verificare l’applicabilità del modello di Fung
• identificare i parametri m e b del modello e confrontare i parametri ottenuti dai prototipi con quelli ottenuti dal campione umano
Le prove di indentazione sul primo prototipo sono state effettuale seguendo il seguente protocollo:
10° come angolo tra l’asse della struttura rigida interna e la superficie del piatto e 2mm come livello raggiunto di spostamento:
• 0.1 mm/sec • 1 mm/sec • 10 mm/sec
Le prove per i prototipi successivi al primo sono state condotte alle seguenti condizioni :
20° come angolo tra l’asse della falange distale e la superficie del piatto: • 0.1 mm/sec
• 0.5 mm/sec • 2 mm/sec
30° come angolo tra l’asse della falange distale e la superficie del piatto: • 0.1 mm/sec
• 0.5 mm/sec • 2 mm/sec
4.3.2
ramp-hold
La seconda prova d’indentazione effettuata, che d’ora in poi identificheremo con il nome ramp-hold, è stata effettuata su tutti i prototipi, eccetto il primo. Essa è consistita nell’imposizione di uno spostamento a velocità costante del piattino posto inizialmente in contatto con il polpastrello del campione umano e dei prototipi e una successiva fase di mantenimento della posizione raggiunta. Tale prova è stata funzionale all’individuazione della curva forza normale-spostamento con i seguenti obiettivi:
• confrontare le curve ottenute quindi i valori di forza raggiunti e il fenomeno di rilassamento dei prototipi con quelle del campione umano • verificare l’applicabilità del modello di riferimento (vedi equazione (4.9))
ai valori ottenuti
• identificare i parametri m,b,ci,vi del modello e confrontare tra i
Le prove sono state condotte alle seguenti condizioni:
20° come angolo tra l’asse della falange distale e la superficie del piatto: • 1 mm/sec come velocità della rampa,10sec di tenuta in posizione 30° come angolo tra l’asse della falange distale e la superficie del piatto:
• 1 mm/sec come velocità della rampa,10sec di tenuta in posizione
4.3.3
analisi area di contatto
Successivamente alle prove d’indentazione effettuate come descritto nei due paragrafi precedenti, sono stati selezionati i prototipi che avevano presentato i migliori risultati in base ai criteri di valutazione scelti, cosa che verrà am-piamente discussa nel capitolo relativo ai risultati. In particolare sono stati selezionati :
• il terzo prototipo avente come strato interno EcoFlex 0010 • il terzo prototipo avente come strato interno EcoFlex 0030
su questi prototipi selezionati sono state effettuate delle ulteriori prove d’indentazione con lo scopo di valutare l’area effettiva di contatto al variare del livello di indentazione applicato. Naturalmente la stessa prova è stata effettua su un campione umano come termine di riferimento. Il protocollo seguito per le prove è stato il seguente:
• fissaggio del prototipo alla piattaforma a livello dell’unghia
• imposizione di un angolo di contatto tra l’asse della falange distale e la superficie di contatto di 30°
• applicazione di una striscia di carta millimetrata alla superficie di con-tatto
• applicazione di comune inchiostro sul polpastrello del prototipo • imposizione di un certo livello di indentazione
• ritorno allo stato di riposto
Il livello di indentazione attuato è stato il seguente: • 500 − 2750µm (con step di 250µm)