CAPITOLO 4
Descrizione delle alternative di progetto
4.1 Modalità di progettazione
La progettazione deve necessariamente fare riferimento al Decreto Ministeriale del 5 Novembre 2001 “Norme funzionali e geometriche per la
costruzione delle strade”.
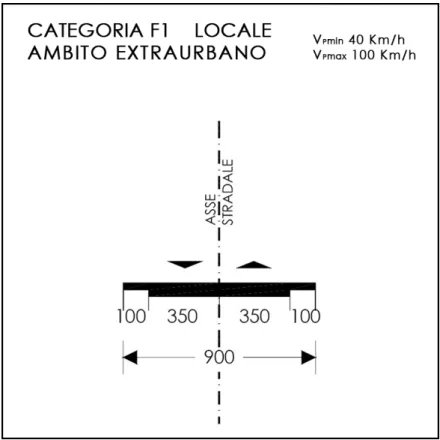
Tenuto conto delle caratteristiche generali della S.P. 13, delle particolarità geomorfologiche dei terreni attraversati, dal tipo e dall’entità del traffico, come tipo di strada è stato fatto riferimento a quello che le Norme indicano come F1. Tale categoria di strada è di tipo locale, adatta a piccole entità di spostamenti e con funzione nel territorio di tipo interlocale e comunale in ambito extraurbano.
Per tale tipo dei strada le norme fissano:
- Due corsie di larghezza ciascuna pari a 3,5 m - Larghezza della banchina pari a 1 m
- Intervallo della velocità di progetto 40-100 Km/h - Raggio minimo 45 m
- Pendenza massima 10% (aumentabile dell’1% per sviluppi massimi di livelletta di 500 metri)
Fig. 4.1 Configurazione della piattaforma secondo il Codice della Strada
4.2 Geometria dell’asse stradale
4.2.1 Visuali libere
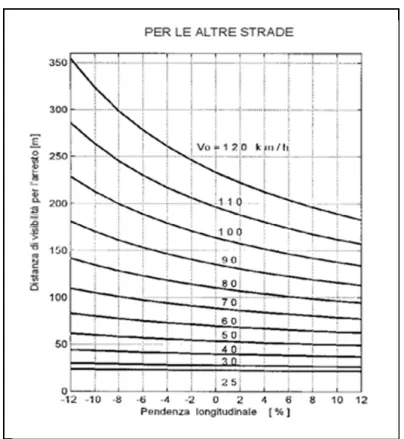
L’esistenza di opportune visuali libere costituisce primaria ed inderogabile condizione di sicurezza della circolazione. Per distanza di visuale libera si intende la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé senza considerare l’influenza del traffico, delle condizioni atmosferiche e di illuminazione della strada.
Essendo la strada in questione extraurbana, la distanza di visuale libera lungo il tracciato stradale deve essere confrontata, in fase di progettazione, con le seguenti distanze:
- distanza di visibilità per l'arresto, che è pari allo spazio minimo necessario perché un conducente possa arrestare il veicolo in condizione di sicurezza davanti ad un ostacolo imprevisto;
- distanza di visibilità per il sorpasso, che è pari alla lunghezza del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa escludere l’arrivo di un veicolo in senso opposto.
La distanza di visibilità per l'arresto si valuta con la seguente espressione:
[m]
Dove: - D
1 spazio percorso nel tempo τ - D
2 spazio di frenatura - V
0 velocità del veicolo all’inizio della frenatura, pari alla velocità di progetto desunta puntualmente dal diagramma delle velocità in km/h - V
1 velocità finale del veicolo, in cui V1 = 0 in caso di arresto [km/h] - i pendenza longitudinale del tracciato [ % ]
- τ tempo complessivo di reazione (percezione, riflessione, reazione e attuazione) [s]
- Ra resistenza aerodinamica [ N ] - m massa del veicolo [kg]
- f
l quota limite del coefficiente di aderenza impegnabile longitudinalmente per la frenatura
- r
0 resistenza unitaria al rotolamento, trascurabile [N/kg]
La resistenza aerodinamica Ra si valuta con la seguente espressione :
[N]
Dove:
- C
x coefficiente aerodinamico - S superficie resistente [ m2]
- ρ massa volumica dell’aria in condizioni standard [kg/m3]
Sostituendo tutti i coefficienti con un unico coefficiente equivalente fe, funzione soltanto della velocità iniziale e per il resto costante, si ottengono risultati analoghi utilizzando l’espressione semplificata di seguito riportata:
Fig. 4.2 Distanza di visibilità per l’arresto
In presenza di veicoli marcianti in senso opposto la distanza di visibilità
completa per il sorpasso si valuta con la seguente espressione:
Dove:
- v (m/s) oppure V(km/h) è la velocità di progetto desunta puntualmente dal diagramma della velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto. Con V=100 km/h si ha: Ds = 550 m
4.2.2 Andamento planimetrico dell’asse stradale
Il tracciato planimetrico è costituito dalla successione di rettifili, curve circolari e curve a raggio variabile (clotoidi), inserite per raccordare elementi a curvatura costante.
Per evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e per ridurre l’abbagliamento nella guida notturna è opportuno che i rettifili abbiano una lunghezza Lr contenuta nel seguente limite:
Tra un rettifilo di lunghezza Lred il raggio più piccolo fra quelli delle due curve collegate al rettifilo stesso, anche con l'interposizione di una curva a raggio variabile, deve essere rispettata la relazione:
- R > L
r per Lr < 300 m - R ≥ 400 m per Lr ≥ 300 m
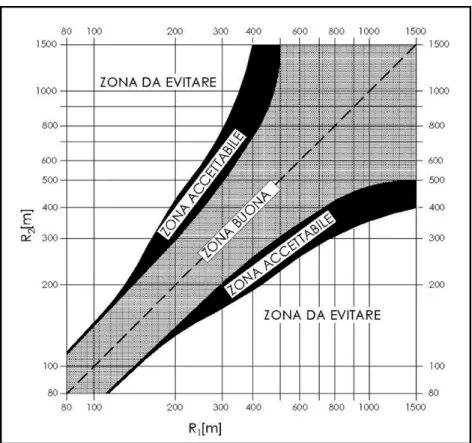
I rapporti tra i raggi R1 e R2 di due curve circolari che, con l’inserimento di un elemento a curvatura variabile, si succedono lungo il tracciato della strada, sono regolati dall’abaco riportato nella figura seguente. In particolare, per le strade di tipo A e B detto rapporto deve collocarsi nella "zona buona"; per le strade degli altri tipi è utilizzabile pure la "zona accettabile".
Fig. 4.3 Rapporti tra i raggi di due curve consecutive
Nello studio del tracciato è stato verificato che la distanza tra curve circolari successive o tra rettifilo e curva circolare, consenta l’introduzione dei raccordi a curvatura variabile. Si è fatto riferimento ai raccordi clotoidici imponendo, per il parametro A che li definisce, le seguenti condizioni:
- Criterio 1 (Limitazione del contraccolpo)
Affinchè lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo), fra il parametro A e la massima velocità V (km/h), desunta dal diagramma di velocità, per l'elemento di clotoide deve essere verificata la relazione:
- Criterio 2 (Sovrapendenza longitudinale delle linee di estremità della carreggiata)
Nelle sezioni di estremità di un arco di clotoide la carreggiata stradale presenta differenti assetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendenza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione.
Nel caso in cui il raggio iniziale sia di valore infinito (rettilineo o punto di flesso), il parametro deve verificare la seguente disuguaglianza:
Dove: B
i distanze fra l’asse di rotazione ed il ciglio della carreggiata nella sezione iniziale della curva a raggio variabile [m]
Δimax (%) sovrapendenza longitudinale massima della linea costituita dai punti che distano B
i dall'asse di rotazione; in assenza di allargamento tale linea coincide con l'estremità della carreggiata
q
i pendenza trasversale iniziale in valore assoluto q
f pendenza trasversale finale in valore assoluto
Nel caso in cui anche il raggio iniziale sia di valore finito (continuità) il parametro deve verificare la seguente disuguaglianza:
Dove: R
i raggio nel punto iniziale della curva a raggio variabile [m] R
f raggio nel punto terminale della curva a raggio variabile [m]
- Criterio 3 (Ottico)
Per garantire la percezione ottica del raccordo deve essere verificata la relazione:
A ≥ R/3 (R
i /3 in caso di continuità)
Inoltre, per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
A ≤ R
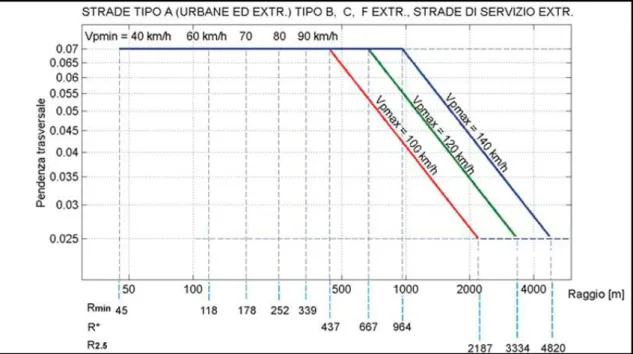
Il raggio minimo Rmin ammissibile per gli archi di curva circolare, è stato ricavato dalla relazione:
Dove si è messo al posto di q il qmax = 7% (pendenza trasversale massima delle falde della piattaforma stradale), dove ft rappresenta la quota parte del coefficiente di aderenza impegnato trasversalmente e
dove al posto di Vp si inserisce il limite inferiore dell’intervallo della velocità di progetto.
Per Vpmin = 40 km/h si ha che ft = 0.17. Da questa relazione si ottiene: Rmin = 45 m
Di seguito in Fig. 4.4 è riportato l’abaco per il calcolo del raggio delle curve circolari.
4.2.3 Andamento altimetrico dell’asse stradale
Il profilo altimetrico è costituito da tratti a pendenza costante (livellette) collegati da raccordi verticali convessi e concavi. La pendenza massima adottabile per il tipo di strada in questione (cat.F) è pari al 10%.
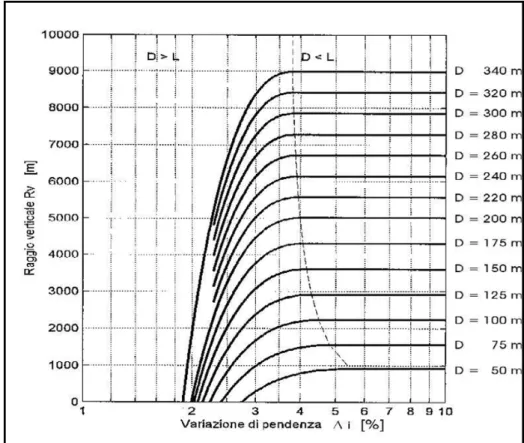
Con riferimento alla distanza di visibilità per l’arresto il raggio minimo per i
raccordi verticali convessi viene determinato come di seguito.
Siano: R
v raggio del raccordo verticale convesso [m] D distanza di visibilità per l’arresto [m]
Δi variazione di pendenza delle due livellette, espressa in percento h
1 altezza sul piano stradale dell’occhio del conducente (1.10 m) h
2 altezza dell’ostacolo (0.10 m) Si distinguono due casi:
- se D è inferiore allo sviluppo L del raccordo si ha:
- Se D è
superiore allo sviluppo L del raccordo si ha:
L’abaco nella figura 4.5 fornisce, per diversi valori di D, le lunghezze del raggio verticale minimo Rv che si può adottare.
Fig. 4.5 Abaco per il calcolo dei raggi minimi per un raccordo convesso
Con riferimento alla sola distanza di visibilità per l’arresto di un veicolo di fronte ad un ostacolo fisso, ed in mancanza di luce naturale, il raggio minimo dei
raccordi verticali concavi viene determinato come di seguito. Siano:
Rv raggio del raccordo verticale concavo [m]
D distanza di visibilità da realizzare per l’arresto di un veicolo di fronte ad un ostacolo fisso [m]
Δi variazione di pendenza delle due livellette espressa in percento h altezza del centro dei fari del veicolo sul piano stradale [m]
Si distinguono due casi:
- se D è inferiore allo sviluppo del raccordo si ha:
- se D è superiore allo sviluppo del raccordo si ha:
Ponendo h = 0,5 m e θ = 1° si hanno i valori di Rv riportati nella figura 4.6.
Nell’inserimento dei raccordi verticali, sia concavi che convessi, per rendere più graduale l’applicazione della forza centrifuga sui veicoli, si deve eseguire il raccordo con archi di parabola quadratica ad asse verticale, il cui sviluppo è dato da:
Dove:
Δi variazione di pendenza in percento delle livellette da raccordare R
4.3 Descrizione delle alternative di progetto
Di seguito si va ad analizzare le 3 alternative di tracciato per la variante oggetto della presente tesi.
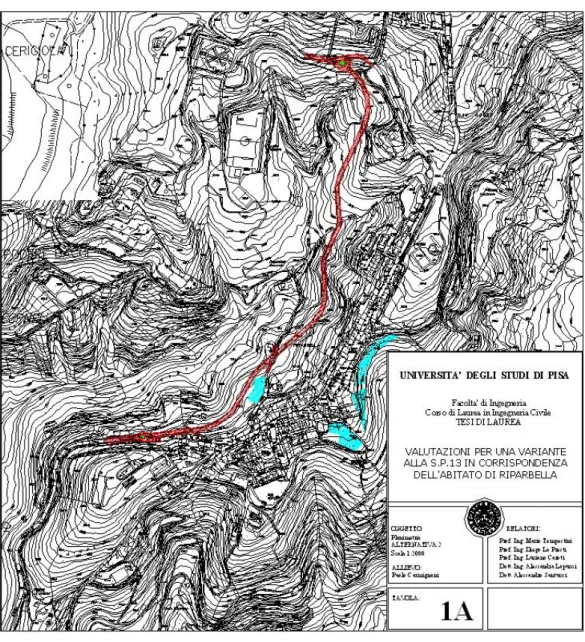
4.3.1 Alternativa 1
4.3.1.1 Calcolo e verifica degli elementi planimetrici - Clotoide: Sezioni 6-7 R = 100 m ΔR = 1 m A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 70 L = A2/R = 49 m Vmax = 62 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.77 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 69.9 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.05 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 54.7 ● Criteri ottici A>Amin = R/3 = 33.3 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.245 rad = 14 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 48.7 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 5.79 xm = xp - R × sen τ = 24.5 ym = yp + R × cos τ = 101.42
- Clotoide di flesso: Sezioni 8-9 R1 = 100 m R2 = 110 m D12 = 5.87 m A = 67.3 L1 = A2/R1 = 45 m L2 = A2/R2 = 41 m Vmax = 60 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.84 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 63.48 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.05 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 48.3 ● Criteri ottici A>Amin = Rmin/3 = 33.3 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.226 rad = 12.98 deg τ2 = A2/(2×R22) = 0.187 rad = 10.73 deg xp1 = A×(2× τ1)1/2 × (1- τ12/10) = 45.01 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 3.39 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 41.01 yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 2.55 xm1 = xp1 - R1 × sen τ1 = 22.55
ym1 = yp1 + R1 × cos τ1 = 100.83 xm2 = xp2 - R2 × sen τ2 = 20.53 ym2 = yp2 + R2 × cos τ2 = 110.63
- Clotoide: Sezioni 10-11 R = 110 m ΔR = 0.84 m
A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 72 L = A2/R = 47 m
Vmax = 63 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.8 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 71.8 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 51.9 ● Criteri ottici A>Amin = R/3 = 36.6 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.214 rad = 12.28 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 46.89 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 3.34 xm = xp - R × sen τ = 23.49 ym = yp + R × cos τ = 110.82
- Clotoide: Sezioni 15-17
R = 70 m ΔR = 2.41 m
A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 66.8 L = A2/R = 63m
Vmax = 55 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.92 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 56 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.14 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 56 ● Criteri ottici A>Amin = R/3 = 23.3 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.455 rad = 26 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 62.4 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 9.41 xm = xp - R × sen τ = 31.7 ym = yp + R × cos τ = 72.33
- Clotoide di flesso: Sezioni 18-20 R1 = 70 m R2 = 70 m D12 = 6 m A = 50 L1 = A2/R1 = 35.7 m L2 = A2/R2 = 35.7 m Vmax = 52 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.97 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 49 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.21 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 42.7 ● Criteri ottici A>Amin = Rmin/3 = 23.3 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.255 rad = 14.6 deg τ2 = A2/(2×R22) = 0.255 rad = 14.6 deg xp1 = A×(2× τ1)1/2 × (1- τ12/10) = 35.47 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 3.01 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 35.47 yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 3.01 xm1 = xp1 - R1 × sen τ1 = 17.82
ym1 = yp1 + R1 × cos τ1 = 70.75 xm2 = xp2 - R2 × sen τ2 = 17.82 ym2 = yp2 + R2 × cos τ2 = 70.75
- Clotoide di flesso: Sezioni 24-27 R1 = 70 m R2 = 70 m D12 = 8.76 m A = 55.2 L1 = A2/R1 = 43.5 m L2 = A2/R2 = 43.5 m Vmax = 54.1 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.93 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 53.8 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.16 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 38.4 ● Criteri ottici A>Amin = Rmin/3 = 23.3 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.311 rad = 17.8 deg τ2 = A2/(2×R22) = 0.311 rad = 17.8 deg xp1 = A×(2× τ1)1/2 × (1- τ12/10) = 43.09 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 4.45 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 43.09 yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 4.45 xm1 = xp1 - R1 × sen τ1 = 21.69
ym1 = yp1 + R1 × cos τ1 = 71.1 xm2 = xp2 - R2 × sen τ2 = 21.69 ym2 = yp2 + R2 × cos τ2 = 71.1
- Clotoide di flesso: Sezioni 28-31 R1 = 70 m R2 = 70 m D12 = 7.37 m A = 52.8 L1 = A2/R1 = 39.8 m L2 = A2/R2 = 39.8 m Vmax = 53 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.95 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 51.4 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.19 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 38.0 ● Criteri ottici A>Amin = Rmin/3 = 23.3 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.284 rad = 16.3 deg τ2 = A2/(2×R22) = 0.284 rad = 16.3 deg xp1 = A×(2× τ1)1/2 × (1- τ12/10) = 39.49 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 3.74 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 39.49 yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 3.74 xm1 = xp1 - R1 × sen τ1 = 19.84
ym1 = yp1 + R1 × cos τ1 = 70.93 xm2 = xp2 - R2 × sen τ2 = 19.84 ym2 = yp2 + R2 × cos τ2 = 70.93
- Clotoide: Sezioni 32-33
R = 70 m ΔR = 0.98 m
A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 53 L = A2/R = 40m
Vmax = 55 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.92 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 56 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.14 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 56 ● Criteri ottici A>Amin = R/3 = 23.3 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.286 rad = 16.4 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 39.75 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 3.78 xm = xp - R × sen τ = 19.99 ym = yp + R × cos τ = 70.93
- Clotoide: Sezioni 36-39 R = 90 m ΔR = 0.98 m
A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 83.6 L = A2/R = 60 m
Vmax = 65.7 Km/h
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 0.77 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 79.8 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 0.96 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 57.28 ● Criteri ottici A>Amin = R/3 = 30 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.43 rad = 24.7 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 76.07 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 10.85 xm = xp - R × sen τ = 38.46 ym = yp + R × cos τ = 92.61
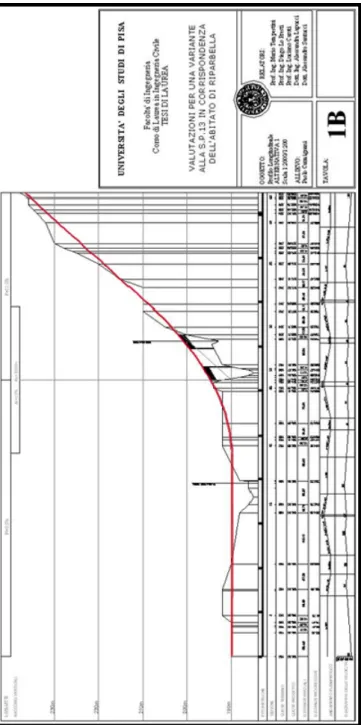
4.3.1.2 Calcolo e verifica degli elementi altimetrici
- Raccordo concavo
V = 50 Km/h i1= 0 % i2= 11 % fe = 0,46
Da= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
Il raggio verticale minimo sarà:
RV = Da 2 / 2 ( h + Da sin θ ) = 958 m Parametri di calcolo: V = 3000 m 00) = 330 m 5 m 00 ) × RV = 0 m V f = RV / 8 × (Δi/100)2 = 6,05 m R L = RV × (Δi/1 L / 2 = 16 xa = ( i1/ 1 ya = [ ( i1/ 100 ) × xa ] + 1 / (2 × R ) × xa2 = 0 m
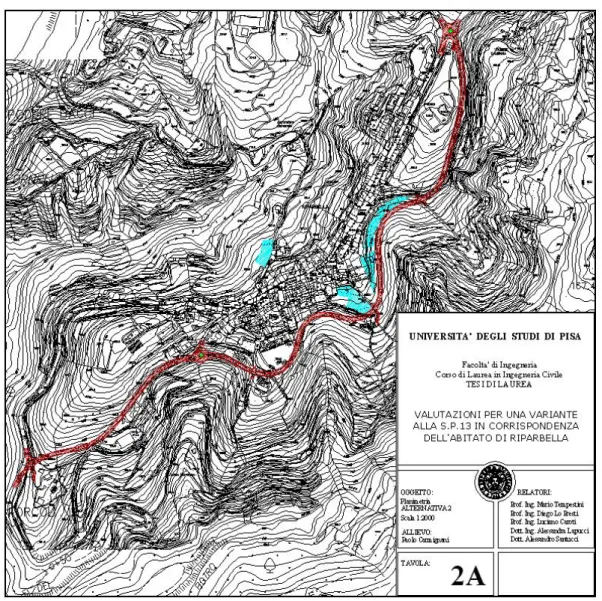
4.3.2 A
Fig. 4.9 Alternativa 2 – Planimetria
4.3.2.1 Calcolo e verifica degli elementi planimetrici lternativa 2
- Clotoide di flesso: Se R1 = 110 m R2 = 120 m D12 = 7.18 m = 75.82 Vmax = 65 Km/h el parametro A ● Contraccolpo 3/c) – (g×v×Rmin×0.07/c))1/2 = 75.48 enza Δimax = 18×3.5/Vmax(km/h) = 0.969 0.07×100/Δimax)1/2 = 59.8 Dati ge ) = 0.20 rad = 11.4 deg (2× τ1) × (1- τ12/10) = 51.9 p1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 4.09 2×τ2)1/2 × (1- τ22/10) = 47.8 m1 = xp1 - R1 × sen τ1 = 26.1
= arctg (xm1+xm2)/(ym1+ym2) = 12.18 deg
zioni 12-14 A L1 = A2/R1 = 52.2 m L2 = A2/R2 = 47.9 m Verifiche d c = 14/vmax(m/s) = 0.78 A > Amin = ((v ● Sovrapend A>Amin = (Rmin×B× ● Criteri ottici A>Amin = Rmin/3 = 36.6 A<Rmin ometrici 2 2 τ1 = A /(2×R1 ) = 0.237 rad = 13.6 deg 2 τ2 = A2/(2×R2 1/2 xp1 = A× y xp2 = A×( yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 3.18 x
ym1 = yp1 + R1 × cos τ1 = 111.0 xm2 = xp2 - R2 × sen τ2 = 24.0 ym2 = yp2 + R2 × cos τ2 = 120.8 ε
- R = 12 A = (24 A = 84.4 L = A2 c = 14/vmax(m/s) = 0.753 ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 81.5 enza Δimax = 18×3.5/Vmax(km/h) = 0.94 0.07×100/Δimax)1/2 = 63.4 Dati ge - τ2/10) = 39.75 2×τ)1/2 × (τ/3 – τ3/24) = 3.78 × sen τ = 19.99 Clotoide: Sezioni 18-24 0 m ΔR = 1.22 m ×R3×ΔR×(1+3/14×ΔR/R))1/4 /R = 59 m Vmax = 67 Km/h
Verifiche del parametro A
● Contraccolpo A > Amin = ● Sovrapend A>Amin = (Rmin×B× ● Criteri ottici A>Amin = R/3 = 40 A<Rmin ometrici τ = A2/(2×R2) = 0.286 rad = 16.4 deg xp = A×(2× τ)1/2 × (1 yp = A×( xm = xp - R ym = yp + R × cos τ = 70.93
- Clotoide: Sezioni 25-26 = 120 m ΔR = 1.22 m 3×ΔR×(1+3/14×ΔR/R))1/4 A = 84.4 = A2/R = 59 m max = 67 Km/h ● Contraccolpo m 1.5 ● Sovrapendenza ×3.5/Vmax(km/h) = 0.94 (Rmin×B×0.07×100/Δimax)1/2 = 63.4 ● Criteri ottici Dati ge 0.286 rad = 16.4 deg × (τ/3 – τ3/24) = 3.78 × sen τ = 19.99 y = y + R × cos τ = 70.93 R A = (24×R L V
Verifiche del parametro A
c = 14/vmax(m/s) = 0.753 A > Amin = ((v3/c) – (g×v×R in×0.07/c))1/2 = 8 Δimax = 18 A>Amin = A>Amin = R/3 = 40 A<Rmin ometrici τ = A2/(2×R2) = xp = A×(2× τ)1/2 × (1- τ2/10) = 39.75 yp = A×(2×τ)1/2 xm = xp - R m p
- Clotoide di flesso: Sezioni 35-43
1 = 95 m R2 = 60 m D12 = 11.82 m
1 = A2/R1 = 40.2 m 2 = A2/R2 = 63.6 m
Verifiche del parametro A
14/vmax(m/s) = 0.93 A > A = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 54.7 a 5/Vmax(km/h) = 1.16 min×B×0.07×100/Δimax)1/2 = 40.36 ● Criteri ottici 0 Dati ge 0.212 rad = 12.13 deg g 1)1/2 × (1- τ12/10) = 40.06 τ13/24) = 2.83 (2×τ2)1/2 × (1- τ22/10) = 61.84 y = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 10.85 xm2 = x - R × sen τ = 31.47 eg R A = 61.8 L L Vmax = 54.3 Km/h ● Contraccolpo c = min ● Sovrapendenz Δimax = 18×3. A>Amin = (R A>Amin = Rmin/3 = 2 A<Rmin ometrici τ1 = A2/(2×R12) = τ2 = A2/(2×R22) = 0.530 rad = 30.41 de xp1 = A×(2× τ yp1 = A×(2× τ1)1/2 × (t1/3 – xp2 = A× p2 xm1 = xp1 - R1 × sen τ1 = 20.10 ym1 = yp1 + R1 × cos τ1 = 95.71
p2 2 2
ym2 = yp2 + R2 × cos τ2 = 62.56
- Clotoide di flesso: Sezioni 45-49 R1 = 60 8.98 m A = 46 1 = A2/R = 35.5 m L = A traccolpo c = 14/vmax(m/s) = 1.03 3/c) – (g×v×Rmin×0.07/c))1/2 = 44.9 a ×3.5/Vmax(km/h) = 1.28 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 35.07 deg 12/10) = 35.2 (2× τ1)1/2 × (t1/3 – τ13/24) = 3.46 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 41.82 2×τ2)1/2 × (τ2/3 – τ23/24) = 5.91
ym1 = yp1 + R1 × cos τ1 = 60.85 m R = 50 m D = 2 12 .15 L 1 2/R = 42.6 m 2 2 Vmax = 49 Km/h
Verifiche del parametro A
● Con A > Amin = ((v ● Sovrapendenz Δimax = 18 ● Criteri ottici A>Amin = Rmin/3 = 16.7 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.296 rad = 16.96 τ2 = A2/(2×R22) = 0.426 rad = 24.42 deg xp1 = A×(2× τ1)1/2 × (1- τ yp1 = A× yp2 = A×( xm1 = xp1 - R1 × sen τ1 = 17.7 xm2 = xp2 - R2 × sen τ2 = 21.15 ym2 = yp2 + R2 × cos τ2 = 51.44
- Clotoide di flesso: Sezioni 51-53 R1 = 50 6.3 m A = 40 1 = A2/R = 33.2 m L = A ntraccolpo c = 14/vmax(m/s) = 1.077 3/c) – (g×v×Rmin×0.07/c))1/2 = 40.16 a ×3.5/Vmax(km/h) = 1.34 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 34.2 deg 12/10) = 33.03 (2× τ1)1/2 × (t1/3 – τ13/24) = 3.67 xp2 = A×(2×τ2)1/2 × (1- τ22/10) = 30.13 2×τ2)1/2 × (τ2/3 – τ23/24) = 2.77 m1 = yp1 + R1 × cos τ1 = 50.90 m R = 55 m D = 2 12 .9 L 1 2/R = 30.2 m 2 2 Vmax = 47 Km/h
Verifiche del parametro A
● Co A > Amin = ((v ● Sovrapendenz Δimax = 18 ● Criteri ottici A>Amin = Rmin/3 = 16.7 A<Rmin Dati geometrici τ1 = A2/(2×R12) = 0.334 rad = 19.15 τ2 = A2/(2×R22) = 0.275 rad = 15.83 deg xp1 = A×(2× τ1)1/2 × (1- τ yp1 = A× yp2 = A×( xm1 = xp1 - R1 × sen τ1 = 16.63 y xm2 = xp2 - R2 × sen τ2 = 15.13 ym2 = yp2 + R2 × cos τ2 = 55.68
- lotoide: Sezioni 60-62
R = 55 m
A = (24×R A = 48.3
L = A2
erifiche del parametro A
A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 45.23 za max(km/h) = 1.27 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 36.9 18.3 g 1/2 × (1- τ2/10) = 41.8 – τ3/24) = 5.36 xm = xp - R × sen τ = 21.11 R × cos τ = 56.32 C ΔR = 1.36 m 3×ΔR×(1+3/14×ΔR/R)) 1/4 /R = 42.4 m Vmax = 49.4 Km/h V ● Contraccolpo c = 14/vmax(m/s) = 1.02 ● Sovrapenden Δimax = 18×3.5/V ● Criteri ottici A>Amin = R/3 = A<Rmin Dati geometrici τ = A2/(2×R2) = 0.386 rad = 22.1 de xp = A×(2× τ) yp = A×(2×τ)1/2 × (τ/3 ym = yp +
- Clotoide: Sezioni 64-65 ΔR = 1.5 m
= (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 59.35 = A2/R = 50.3 m
erifiche del parametro A
A > A = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 55.4 za ×3.5/Vmax(km/h) = 1.14 A>A = (R ×B×0.07×100/Δimax)1/2 = 43.9 23.4 1/2 × (1- τ2/10) = 38.79 – τ3/24) = 5.92 x = x - R × sen τ = 14.16 R × cos τ = 71.44 R = 70 m A L Vmax = 55 Km/h V ● Contraccolpo c = 14/vmax(m/s) = 0.92 min ● Sovrapenden Δimax = 18 min min ● Criteri ottici A>Amin = R/3 = A<Rmin Dati geometrici τ = A2/(2×R2) = 0.359rad = 20.6 deg xp = A×(2× τ) yp = A×(2×τ)1/2 × (τ/3 m p ym = yp +
- Clotoide di flesso: Sezioni 67-71 1 = 70 m R2 = 70 m D12 = 5.95 m
1 = A2/R1 = 35.7 m 2 = A2/R2 = 35.7 m
Verifiche del parametro A
max(m/s) = 0.97 A > A = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 49 a 5/Vmax(km/h) = 1.21 (Rmin×B×0.07×100/Δimax)1/2 = 42.7 ● Criteri ottici 3.4 Dati ge 0.255 rad = 14.6 deg 1)1/2 × (1- τ12/10) = 35.47 – τ13/24) = 3.01 (2×τ2)1/2 × (1- τ22/10) = 35.47 y = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 3.01 m2 = x - R × sen τ = 17.82 eg R A = 50 L L Vmax = 52 Km/h ● Contraccolpo c = 14/v min ● Sovrapendenz Δimax = 18×3. A>Amin = A>Amin = Rmin/3 = 2 A<Rmin ometrici τ1 = A2/(2×R12) = τ2 = A2/(2×R22) = 0.255 rad = 14.6 deg xp1 = A×(2× τ yp1 = A×(2× τ1)1/2 × (t1/3 xp2 = A× p2 xm1 = xp1 - R1 × sen τ1 = 17.82 ym1 = yp1 + R1 × cos τ1 = 70.75
x p2 2 2
ym2 = yp2 + R2 × cos τ2 = 70.75
- lotoide: Sezioni 73-77
R = 70
A = (24 A = 56.3
L = A2 = 45.3 m V =
erifiche del parametro A
A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 53.8 za ×3.5/Vmax(km/h) = 1.16 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 43.6 23.4 1/2 × (1- τ2/10) = 44.78 – τ3/24) = 4.8 m = xp - R × sen τ = 22.57 R × cos τ = 71.18 C m ΔR = 1.22 m ×R3×ΔR×(1+3/14×ΔR/R))1/4 /R max 54 Km/h V ● Contraccolpo c = 14/vmax(m/s) = 0.93 ● Sovrapenden Δimax = 18 ● Criteri ottici A>Amin = R/3 = A<Rmin Dati geometrici τ = A2/(2×R2) = 0.323rad = 18.5 deg xp = A×(2× τ) yp = A×(2×τ)1/2 × (τ/3 x ym = yp +
- Clotoide: Sezioni 79-84 = 250 m ΔR = 1.32 m 3×ΔR×(1+3/14×ΔR/R))1/4 A = 149.2 = A2/R = 89 m max = 90 Km/h ● Contraccolpo m 4 ● Sovrapendenza ×3.5/Vmax(km/h) = 0.7 (Rmin×B×0.07×100/Δimax)1/2 = 106.06 ● Criteri ottici Dati ge 0.178rad = 10.2 deg × (τ/3 – τ3/24) = 5.26 × sen τ = 44.47 = y + R × cos τ = 251.31 R A = (24×R L V
Verifiche del parametro A
c = 14/vmax(m/s) = 0.56 A > Amin = ((v3/c) – (g×v×R in×0.07/c))1/2 = 14 Δimax = 18 A>Amin = A>Amin = R/3 = 83.3 A<Rmin ometrici τ = A2/(2×R2) = xp = A×(2× τ)1/2 × (1- τ2/10) = 88.74 yp = A×(2×τ)1/2 xm = xp - R ym p
4.3.2.2 Calcolo e verifica degli elementi altimetrici
- Raccordo concavo
V = 50 Km/h i1= 7,4 % i2= 11 % fe = 0,46
Da= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
Il raggio verticale minimo sarà:
RV = Da 2 / 2 ( h + Da sin θ ) = 958 m
Parametri di calcolo:
RV = 1500 m
L = RV × (Δi/100) = 54 m L / 2 = 27 m
- Raccordo convesso
V = 50 Km/h i1= 11 % i2= 0,5 % fe = 0,46
Da= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
raggio verticale minimo sarà:
(2 × ( h1 + h2 + 2 × √( h1 × h2 ))) = 773 m di calcolo: RV = 2000 m / 2 = 105 m Il RV = Da 2 / Parametri L = RV × (Δi/100) = 210 m L
- accordo concavo = 50 Km/h = 0,5 % = 3,5 % = 0,46 28 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
ale minimo sarà:
2 ( h + Da sin θ ) = 958 m = RV × (Δi/100) = 240 m R V i1 i2 fe Da= 0,78 × V – 0,00 Il raggio vertic RV = Da 2 / Parametri di calcolo: RV = 8000 m L L / 2 = 120 m
- Raccordo concavo V = 50 Km/h i1= 3,5 % i2= 11 % fe = 0,46 028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
ale minimo sarà:
2 ( h + Da sin θ ) = 958 m = RV × (Δi/100) = 150 m 70 m a = [ ( i1/ 100 ) × xa ] + 1 / (2 × RV) × xa2 = 3.675 m i/100)2 = 1,40 m Da= 0,78 × V – 0,0 Il raggio vertic RV = Da 2 / Parametri di calcolo: RV = 2000 m L L / 2 = 75 m xa = ( i1/ 100 ) × RV = y f = RV / 8 × (Δ
- Raccordo convesso V = 50 Km/h i1= 11 % i2= 2 % fe = 0,46 028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
ale minimo sarà:
1 + h2 + 2 × √( h1 × h2 ))) = 773 m = RV × (Δi/100) = 180 m m a = [ ( i1/ 100 ) × xa ] + 1 / (2 × RV) × xa2 = m i/100)2 = m Da= 0,78 × V – 0,0 Il raggio vertic RV = Da 2 / (2 × ( h Parametri di calcolo: RV = 2000 m L L / 2 = 90 m xa = ( i1/ 100 ) × RV = y f = RV / 8 × (Δ
4.3.3 Alternativa 3
ternativa 3 - Planimetria Fig. 4.11 Al
4.3.3.1 Calcolo e verifica degli elementi planimetrici - Clotoide: Sezioni 16-22 = 45 m ΔR = 1.54 m A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 42.9 2 max
Verifiche del parametro A
● Contraccolpo c = 14/vmax(m/s) = 1.26 A > Amin = ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 28.82 ● Sovrapendenza Δimax = 18×3.5/Vmax(km/h) = 1.57 A>Amin = (Rmin×B×0.07×100/Δimax)1/2 = 30 ● Criteri ottici A>Amin = R/3 = 15 A<Rmin Dati geometrici τ = A2/(2×R2) = 0.45 rad = 22.7 deg xp = A×(2× τ)1/2 × (1- τ2/10) = 39.87 yp = A×(2×τ)1/2 × (τ/3 – τ3/24) = 5.95 xm = xp - R × sen τ = 22.5 ym = yp + R × cos τ = 47.46 R L = A /R = 40.9 m V = 40 Km/h
- Clotoide di flesso 1 = 45 m R2 = 95 m D12 = 8.16 m = 48.9 2 = A2/R2 = 25.2 m c = 14/vmax(m/s) = 1.04 (v3/c) – (g×v×Rmin×0.07/c))1/2 = 44.4 enza Δimax = 18×3.5/Vmax(km/h) = 1.30 0.07×100/Δimax)1/2 = 33 Dati ge et .8 ) = 0.132 rad = 7.59 deg (2× τ1) × (1- τ12/10) = 51.27 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 9.99 τ2)1/2 × (1- τ22/10) = 25.08 2×τ2)1/2 × (τ2/3 – τ23/24) = 1.10
ym1 = yp1 + R1 × cos τ1 = 47.36
m2) = 15.19 deg : Sezioni 24-33 R A L1 = A2/R1 = 53.1 m L Vmax = 48.5 Km/h
Verifiche del parametro A
● Contraccolpo A > Amin = ( ● Sovrapend A>Amin = (Rmin×B× ● Criteri ottici A>Amin = Rmin/3 = 15 A<Rmin om rici 2 2 τ1 = A /(2×R1 ) = 0.590 rad = 33 5 deg 2 2 τ2 = A /(2×R2 xp1 = A× 1/2 xp2 = A×(2× yp2 = A×( xm1 = xp1 - R1 × sen τ1 = 26.2 xm2 = xp2 - R2 × sen τ2 = 12.53 ym2 = yp2 + R2 × cos τ2 = 95.27 ε = arctg (xm1+xm2)/(ym1+y
- -43 1 = 95 m R2 = 60 m D12 = 11.82 m = 61.8 1 = A2/R1 = 40.2 m Vmax = 54.3 Km/h del parametro A ● Contraccolpo 3/c) – (g×v×Rmin×0.07/c))1/2 = 54.7 za Δimax = 18×3.5/Vmax(km/h) = 1.16 0.07×100/Δimax)1/2 = 40.36 Dati ge ) = 0.530 rad = 30.41 deg (2× τ1) × (1- τ12/10) = 40.06 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 2.83 2×τ2)1/2 × (1- τ22/10) = 61.84 xm1 = xp1 - R1 × sen τ1 = 20.10
ε = arctg (xm1+xm2)/(ym1+ym2) = 18.05 deg
Clotoide di flesso: Sezioni 35
R A L L2 = A2/R2 = 63.6 m Verifiche c = 14/vmax(m/s) = 0.93 A > Amin = ((v ● Sovrapenden A>Amin = (Rmin×B× ● Criteri ottici A>Amin = Rmin/3 = 20 A<Rmin ometrici 2 2 τ1 = A /(2×R1 ) = 0.212 rad = 12.13 deg 2 τ2 = A2/(2×R2 xp1 = A× 1/2 xp2 = A×( yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 10.85
ym1 = yp1 + R1 × cos τ1 = 95.71 xm2 = xp2 - R2 × sen τ2 = 31.47 ym2 = yp2 + R2 × cos τ2 = 62.56
- 45 R1 = 60 8.98 m A = 46 L = A Vmax = 49 Km/h del parametro A ● Contraccolpo 3/c) – (g×v×Rmin×0.07/c))1/2 = 44.9 za Δimax = 18×3.5/Vmax(km/h) = 1.28 0.07×100/Δimax)1/2 = 35.07 Dati ge 2) = 0.426 rad = 24.42 deg (2× τ1)1/2 × (1- τ12/10) = 35.2 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 3.46 2×τ2)1/2 × (1- τ22/10) = 41.82 xm1 = xp1 - R1 × sen τ1 = 17.7
ε = arctg (xm1+xm2)/(ym1+ym2) = 19.08 deg
Clotoide di flesso: Sezioni
m R = 50 m D = 2 12 .15 1 2/R = 35.5 m 1 L2 = A2/R2 = 42.6 m Verifiche c = 14/vmax(m/s) = 1.03 A > Amin = ((v ● Sovrapenden A>Amin = (Rmin×B× ● Criteri ottici A>Amin = Rmin/3 = 16.7 A<Rmin ometrici τ1 = A2/(2×R12) = 0.296 rad = 16.96 deg τ2 = A2/(2×R2 xp1 = A× xp2 = A×( yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 5.91
ym1 = yp1 + R1 × cos τ1 = 60.85 xm2 = xp2 - R2 × sen τ2 = 21.15 ym2 = yp2 + R2 × cos τ2 = 51.44
- 8 R1 = 50 6.3 m A = 40 L = A Vmax = 47 Km/h el parametro A ● Contraccolpo 3/c) – (g×v×Rmin×0.07/c))1/2 = 40.16 enza Δimax = 18×3.5/Vmax(km/h) = 1.34 0.07×100/Δimax)1/2 = 34.2 Dati ge 2) = 0.275 rad = 15.83 deg (2× τ1)1/2 × (1- τ12/10) = 33.03 yp1 = A×(2× τ1)1/2 × (t1/3 – τ13/24) = 3.67 2×τ2)1/2 × (1- τ22/10) = 30.13 xm1 = xp1 - R1 × sen τ1 = 16.63
ε = arctg (xm1+xm2)/(ym1+ym2) = 16.59 deg
Clotoide di flesso: Sezioni 46-4
m R = 55 m D = 2 12 .9 1 2/R = 33.2 m 1 L2 = A2/R2 = 30.2 m Verifiche d c = 14/vmax(m/s) = 1.077 A > Amin = ((v ● Sovrapend A>Amin = (Rmin×B× ● Criteri ottici A>Amin = Rmin/3 = 16.7 A<Rmin ometrici τ1 = A2/(2×R12) = 0.334 rad = 19.15 deg τ2 = A2/(2×R2 xp1 = A× xp2 = A×( yp2 = A×(2×τ2)1/2 × (τ2/3 – τ23/24) = 2.77
ym1 = yp1 + R1 × cos τ1 = 50.90 xm2 = xp2 - R2 × sen τ2 = 15.13 ym2 = yp2 + R2 × cos τ2 = 55.68
- R = 55 m = (24 A = 48.3 2 max ntraccolpo (m/s) = 1.02 3/c) – (g×v×Rmin×0.07/c))1/2 = 45.23 a ×3.5/Vmax(km/h) = 1.27 A>A = (R ×B×0.07×100/Δimax)1/2 = 36.9 18.3 1/2 × (1- τ2/10) = 41.8 3/24) = 5.36 x = x - R × sen τ = 21.11 R × cos τ = 56.32 Clotoide: Sezioni 55-57 ΔR = 1.36 m ×R3×ΔR×(1+3/14×ΔR/R))1/4 A L = A /R = 42.4 m V = 49.4 Km/h
Verifiche del parametro A
● Co c = 14/vmax A > Amin = ((v ● Sovrapendenz Δimax = 18 min min ● Criteri ottici A>A = R/3 =min A<Rmin Dati geometrici τ = A2/(2×R2) = 0.386 rad = 22.1 deg xp y = A×(2×τ)1/2 × (τ/3 – τ = A×(2× τ) p m p ym = yp +
- R = 70 A = (24 A = 59.35 L = A2 c = 14/vmax(m/s) = 0.92 (v3/c) – (g×v×Rmin×0.07/c))1/2 = 55.4 za Δimax = 18×3.5/Vmax(km/h) = 1.14 0.07×100/Δimax)1/2 = 43.9 Dati ge et / = de τ2/10) = 38.79 (2×τ) × (τ/3 – τ3/24) = 5.92 × sen τ = 14.16 Clotoide: Sezioni 59-60 m ΔR = 1.5 m ×R3×ΔR×(1+3/14×ΔR/R))1/4 /R = 50.3 m Vmax = 55 Km/h
Verifiche del parametro A
● Contraccolpo A > Amin = ( ● Sovrapenden A>Amin = (Rmin×B× ● Criteri ottici A>Amin = R/3 = 23.4 A<Rmin om rici 2 2 τ = A (2×R ) 0.359rad = 20.6 g xp = A×(2× τ)1/2 × (1- 1/2 yp = A× xm = xp - R ym = yp + R × cos τ = 71.44
- Clotoide di flesso: Sezioni 62-66 1 = 70 m R2 = 70 m D12 = 5.95 m 2 2 2 = 52 Km/h ● Contraccolpo /s) = 0.97 ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 49 ● Sovrapendenza (km/h) = 1.21 ×B×0.07×100/Δimax)1/2 = 42.7 ● Dati ge 2) = 0.255 rad = 14.6 deg 5 rad = 14.6 deg x = A×(2× τ1)1/2 × (1- τ12/10) = 35.47 2× τ )1/2 × (t /3 – τ 3/24) = 3.01 R A = 50 L1 = A /R1 = 35.7 m L = A2/R = 35.7 m Vmax
Verifiche del parametro A
c = 14/vmax(m A > Amin = Δimax = 18×3.5/Vmax A>Amin = (Rmin Criteri ottici A>Amin = Rmin/3 = 23.4 A<Rmin ometrici τ1 = A2/(2×R1 τ2 = A2/(2×R22) = 0.25 p1 yp1 = A×( 1 1 1 xp2 = A×(2×τ2)1/2 × (1- τ22 p2 = A×(2×τ )1/2 × (τ /3 – τ 3/24) = 3.01 m1 = y + R × cos τ = 70.75 2 75
ε = arctg (xm1+xm2)/(ym1+ym2) = 14.14 deg /10) = 35.47
y 2 2 2
xm1 = xp1 - R1 × sen τ1 = 17.82
y p1 1 1
xm2 = xp2 - R2 × sen τ2 = 17.8 ym2 = yp2 + R2 × cos τ2 = 70.
- Clotoide: Sezioni 68-70 = 70 m ΔR = 1.22 m 3×ΔR×(1+3/14×ΔR/R))1/4 A = 56.3 2 max lpo c = 14/v (m/s) = 0.93 3/c) – (g×v×Rmin×0.07/c))1/2 = 53.8 a ×3.5/Vmax(km/h) = 1.16 A>A = (R ×B×0.07×100/Δimax)1/2 = 43.6 23.4 1/2 × (1- τ2/10) = 44.78 3/24) = 4.8 x = x - R × sen τ = 22.57 R × cos τ = 71.18 R A = (24×R L = A /R = 45.3 m V = 54 Km/h
Verifiche del parametro A
● Contracco max A > Amin = ((v ● Sovrapendenz Δimax = 18 min min ● Criteri ottici A>Amin = R/3 = A<Rmin Dati geometrici τ = A2/(2×R2) = 0.323rad = 18.5 deg xp = A×(2× τ) yp = A×(2×τ)1/2 × (τ/3 – τ m p ym = yp +
- R = 25 A = (24×R3×ΔR×(1+3/14×ΔR/R))1/4 A = 149.2 max = 90 Km/h ● Contraccolpo /s) = 0.56 ((v3/c) – (g×v×Rmin×0.07/c))1/2 = 144 ● Sovrapendenza (km/h) = 0.7 ×B×0.07×100/Δimax)1/2 = 106.06 ● Dati ge 2× τ)1/2 × (1- τ2/10) = 88.74 p = A×(2×τ)1/2 × (τ/3 – τ3/24) = 5.26 m = yp + R × cos τ = 251.31 Clotoide: Sezioni 74-79 0 m ΔR = 1.32 m L = A2/R = 89 m V
Verifiche del parametro A
c = 14/vmax(m A > Amin = Δimax = 18×3.5/Vmax A>Amin = (Rmin Criteri ottici A>Amin = R/3 = 83.3 A<Rmin ometrici τ = A2/(2×R2) = 0.178rad = 10.2 deg xp = A×( y xm = xp - R × sen τ = 44.47 y
4.3.3.2 Calcolo e verifica degli elementi altimetrici
- Raccordo concavo
V = 50 Km/h i1= - 3,5 %
fe = 0,46
Da= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
Il raggio verticale minimo sarà:
RV = Da 2 / 2 ( h + Da sin θ ) = 958 m Parametri di calcolo: RV = 1200 m L = RV × (Δi/100) = 138 m L / 2 = 69 m xa = ( i1/ 100 ) × RV = 42 m ya = [ ( i1/ 100 ) × xa ] + 1 / (2 × RV) × xa2 = - 0.735 m f = RV / 8 × (Δi/100)2 = 1,98 m i2= 8 %
- Raccordo convesso
V = 50 Km/h i1= 8 % i2= 3,5 % fe = 0,46
Da= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
Il raggio verticale minimo sarà:
RV = Da 2 / (2 × ( h1 + h2 + 2 × √( h1 × h2 ))) = 773 m Parametri di calcolo: RV = 2000 m L = RV × (Δi/ L / 2 = 45 m 100) = 90 m
- accordo concavo = 50 Km/h a= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m V = Da 2 / 2 ( h + Da sin θ ) = 958 m arametri di calcolo: V = 2000 m = RV × (Δi/100) = 150 m × RV = 70 m a ] + 1 / (2 × RV) × xa2 = 3.675 m (Δi/100)2 = 1,40 m R V i1= 3,5 % i2= 11 % fe = 0,46 D
Il raggio verticale minimo sarà:
R P R L L / 2 = 75 m xa = ( i1/ 100 ) ya = [ ( i1/ 100 ) × x f = RV / 8 ×
- accordo convesso
= 50 Km/h
a= 0,78 × V – 0,0028 × V2 + V2 / [ 254 × (fe - i1/100) ] = 51,9 m
Il raggio verticale minimo sarà:
RV = Da 2 / (2 × ( h1 + h2 + 2 × √( h1 × h2 ))) = 773 m Parametri di calcolo: RV = 2000 m L = RV × (Δi/100) = 180 m L / 2 = 90 m R V i1= 11 % i2= 2 % fe = 0,46 D