Capitolo2
Registrazione con tavola rotante
Abbiamo detto che il problema dell’acquisizione di oggetti di forma complessa o troppo grande può essere risolto tramite la suddivisione della superficie in diverse zone (avente almeno una parte in comune) e sovrapponendole successivamente.
Per favorire la tecnica della sovrapposizione, sono state utilizzate tecniche fotogrammetriche con l’ausilio di marker (almeno tre) applicati opportunamente sulle zone di sovrapposizione delle diverse scansioni e portati a sovrapporsi tramite un allineamento fatto in modo semi-automatico. Purtroppo una simile procedura di allineamento è soggetta ad errori introdotti durante la procedura di rilevazione dell’esatta posizione dei marker, nel caso questi si trovino in una zona “sfuggente” non ben inquadrata dalle telecamere. Il problema che rimane anche in caso di buon posizionamento dei marker tuttavia, è che spesso si commettono errori nel momento in cui l’ultima acquisizione “chiude” il contorno dell’oggetto sovrapponendosi alla prima.
Nel caso di oggetti piccoli o con superfici che non permettono l’applicazione di marker, si può pensare di utilizzare una tavola rotante che ha un controllo sulla rotazione, in modo tale da
agevolare grandemente la ricostruzione dell’oggetto avendo un solo grado di libertà e conoscendo (in funzione della precisione dello strumento di controllo della rotazione) la posizione relativa di ogni acquisizione rispetto all’altra.
2.1 - Rilevazione dell’asse
Il primo problema che si presenta utilizzando una tavola rotante è la rilevazione della posizione dell’asse di rotazione rispetto al sistema di riferimento delle telecamere. Quando applichiamo le rotazioni ai modelli di superficie per la procedura di ricostruzione infatti, dobbiamo stabilire l’asse attorno al quale compiere queste rotazioni. Si rende necessario così una procedura di calibrazione tra la posizione della tavola rotante (e quindi del suo asse) e quella delle telecamere.
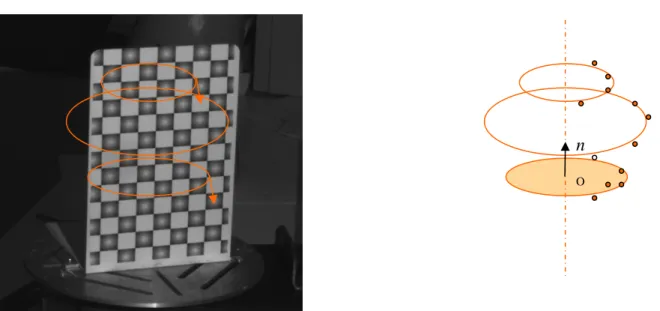
La procedura che abbiamo sviluppato si basa sull’acquisizione di un provino piano che riporta sulla superficie una scacchiera per la rilevazione di automatica dei punti. Questa rilevazione avviene
tramite un codice che va ad individuare il punto nelle zone di maggior gradiente di intensità luminosa.
I punti presenti sul provino durante la rotazione della tavola descriveranno delle circonferenze aventi il centro giacente proprio sull’asse di rotazione cercato. I centri di dette circonferenze possono essere considerati come punti diversi facenti parte dell’asse di rotazione (Figura 2.1). Sia la rilevazione delle circonferenze descritte tramite la traiettoria dei punti del provino, sia quella dell’asse di rotazione derivata da quella delle circonferenze, sono fatte estrapolandole tramite una approssimazione ai minimi quadrati.
n
O
Figura 2.1 Il provino di calibrazione viene fatto ruotare sulla tavola, ad intervalli regolari, di un certo numero di gradi, ad ogni rotazione si procede all’acquisizione dei punti. Dopo aver acquisito un numero sufficiente di rotazioni, si procede alla rilevazione delle circonferenze. L’asse sarà il luogo dei centri di tutte le circonferenze
Le circonferenze descritte dai punti a diverse altezze rispetto al piano di appoggio dell’oggetto, sono ottenute mediante un’implementazione (con codice in ambiente MATLAB®) di un metodo ai minimi quadrati di equazioni di circonferenze che approssimano al meglio quelle descritte dalle traiettorie dei punti.
Anche il calcolo dell’orientamento dell’asse avviene tramite un “best-fit” di una linea che passa più vicino possibile a tutti i centri delle circonferenze, mentre per l’origine è sufficiente prendere un punto qualsiasi sull’asse.
Grazie al metodo dei minimi quadrati possiamo anche ovviare a errori dovuti al rumore ed ottenere quindi un’approssimazione più che accettabile.
Tentativi per valutare l’errore commesso nella rilevazione dell’asse di rotazione sono stati fatti usando come provino una parallelepipedo perfettamente piano di alluminio di piccolo spessore e una faccia molto estesa. Abbiamo dapprima acquisito la lastra in una data posizione e
successivamente abbiamo ripetuto l’operazione dopo aver imposto una rotazione nota alla tavola. Fatto questo si è confrontato i risultati con una rotazione “virtuale” della prima scansione, attorno all’asse di rotazione e abbiamo verificato se le due superfici piane fossero o meno perfettamente sovrapposte.
Nel caso di non corretta sovrapposizione gli errori possono essere causati da un errore sulla rilevazione dell’asse durante il processo di calibrazione, meno dalla precisione di rotazione della tavola rotante.
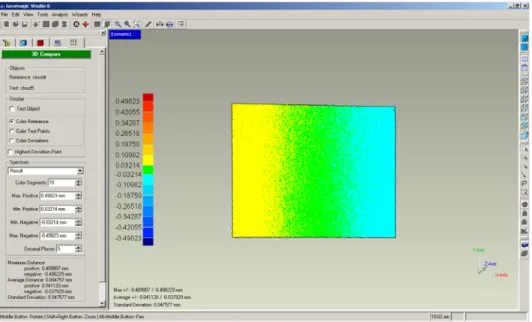
Calcolando le distanze tra i punti delle due superfici ruotate, una tramite una vera rotazione sulla tavola, l’altra ruotata in modo virtuale, si nota che le differenze maggiori si hanno ai bordi laterali della superficie, segno della presenza di un errore nella rotazione (nell’esempio in figura 2.2 si notano + o – 0.109 mm di errore di posizionamento sulle estremità del provino che corrisponde, data la lunghezza del provino di 280mm ad un errore sulla rotazione di 0.044 gradi).
Se vi fossero differenze anche sui bordi superiore ed inferiore del provino, vi sarebbe anche un errore di direzionalità dell’asse (che in questo caso non sono visibili, anche se presenti).
Figura 2.2 – Un esempio di possibili errori sulla rotazione di un provino piano su tavola rotante dopo l’estrapolazione dell’asse con un metodo ai minimi quadrati
2.1 - Risultati
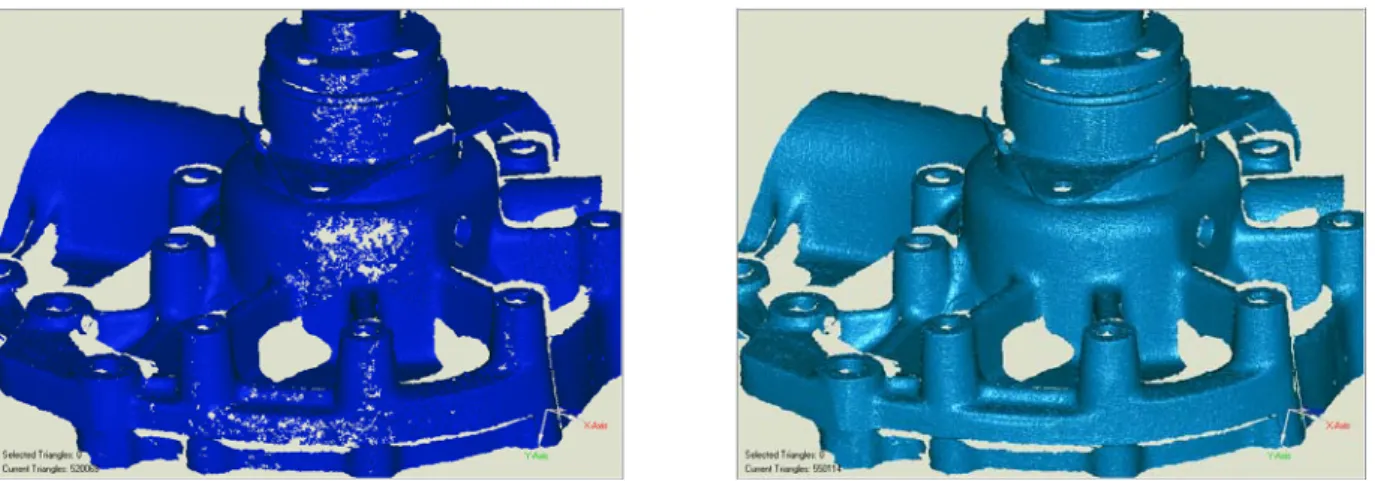
La tavola rotante che abbiamo in dotazione, è una ISEL RF1 con una possibilità di passo minimo pari 0,0009 gradi. Nonostante una precisione così alta sulla rotazione, si nota che con acquisizioni multiple le sovrapposizioni delle nuvole risultano imperfette (particolare visibile ad occhio nudo dopo un operazione di unione dei punti e triangolazione).
Figura 2.3 – A sinistra una nuvola triangolata così come ottenuta dalla tavola rotante, a destra dopo la registrazione
L’errore è da imputare al processo di calibrazione. Nasce quindi l’esigenza di migliorare la sovrapposizione.