Capitolo
1
Stato dell’arte
1.1 Introduzione
Lo studio del movimento umano consiste nella misura delle variabili che descrivono la cinematica e la dinamica dei segmenti corporei. Le variabili cinematiche (posizione, velocità e accelerazione) sono ottenute tramite i sistemi di analisi del movimento, mentre le variabili dinamiche sono derivate indirettamente tramite la misura delle forze esterne applicate. A partire dagli antichi Greci, da Aristotele con il suo “De Motu Animalium” passando per Leonardo da Vinci, Newton ed Eulero, sono stati diversi gli uomini di scienza che si sono interessati al tema della misura del movimento umano. I sistemi di analisi del movimento sono utilizzati in un ampio numero di discipline. Molti scienziati focalizzano la loro ricerca sulla comprensione dei meccanismi base che l’uomo compie durante le attività quotidiane, come ad esempio la camminata. Nel campo riabilitativo i sistemi di misura del movimento sono impiegati sia per la valutazione del recupero dopo il trattamento sia per la riabilitazione assistita da robot o in realtà virtuale. Nel campo sportivo, atleti e allenatori utilizzano sempre di più queste tecniche di analisi del movimento per ottimizzare le performance e per evitare possibili infortuni. Nel campo multimediale, tali sistemi sono utilizzati per la creazione di animazioni che riflettano in modo più somigliante possibile il reale movimento degli esseri viventi con applicazioni nell’industria cinematografica e dei videogiochi.
I principali sistemi di analisi del movimento possono essere classificati in meccanici, optoelettronici e magnetici. Nell’effettuare la misura dei parametri di interesse il corpo umano è schematizzato come una catena cinematica formata da link rigidi connessi da giunti; in conseguenza per la descrizione del movimento vengono impiegate le leggi che descrivono il moto di tali corpi.
I sistemi meccanici utilizzano gli elettrogoniometri come strumento di misura. Questi dispositivi vengono applicati in corrispondenza delle articolazioni corporee e forniscono gli angoli ai modelli utilizzati per la rappresentazione della postura del corpo. L’utilizzo dei goniometri presenta diversi problemi. In particolare, i tessuti molli provocano una variazione di posizione del goniometro durante il movimento del soggetto. Inoltre, il corretto posizionamento del dispositivo è molto difficile, specialmente per le articolazioni più complesse come, ad esempio, la spalla.
I sistemi optoelettronici o stereofotogrammetrici sono basati sull’utilizzo di telecamere per ricostruire la cinematica di un corpo attraverso la determinazione di particolari marcatori posizionati sul soggetto. I marcatori possono essere di tipo passivo (riflettente) o attivo (emettitori di luce). Dalla conoscenza delle coordinate tridimensionali dei marcatori è possibile calcolare accuratamente la cinematica dei segmenti corporei sotto esame. I sistemi ottici soffrono di problemi di occlusione del punto di vista e di interferenze dovute ad altre fonti luminose e sistemi riflettenti. Un’ampia descrizione di tali sistemi è stata effettuata in.
I sistemi magnetici misurano il campo magnetico generato da una sorgente trasmittente tramite dei ricevitori posizionati sul segmento corporeo di interesse. Attraverso opportune operazioni di elaborazione, è possibile ottenere la posizione e l’orientamento dei ricevitori rispetto alla sorgente. Essendo il corpo umano trasparente rispetto ai campi magnetici utilizzati, questi sistemi non soffrono del problema dell’occlusione del punto di vista come nel caso dei sistemi ottici. Tuttavia, le maggiori problematiche riscontrate riguardano la fisica del campo magnetico: l’intensità decresce rapidamente all’aumentare della distanza e il campo è suscettibile a disturbi dovuti alla vicinanza di elementi ferro-magnetici.
I sistemi optoelettronici sono comunemente considerati come i sistemi “standard” nel campo dell’analisi del movimento umano. Sebbene questi sistemi siano molto accurati e precisi, presentano delle limitazioni di utilizzo dovute principalmente ai costi elevati, al limitato volume di lavoro e alla loro natura intrinseca che li rende utilizzabili solamente all’interno di strutture e laboratori attrezzati.
Diamo ora una breve descrizione di alcuni sistemi commerciali per l’analisi del movimento [1].
1.2 CyberGlove® II
Fig. 1.1: CyberGlove II wireless
Si tratta di un guanto sensorizzato prodotto dalla Immersion Corporation in grado di trasformare i movimenti della mano e delle dita in realtime data per molteplici applicazioni quali: animazione, motion capture, realtà virtuale, studi biomeccanici etraining medico e militare [2]. Il CyberGlove è costituito da 22 goniometri resistivi per la misurazione dell’angolo articolare, di cui: 3 sensori di flessione per ogni dito, 4 sensori per l’abduzione, un sensore per l’arco palmare e sensori per misurare la flessione-estensione del polso.
Il CyberGlove® II è divenuto uno standard per la misurazione di alta precisione della mano ed il motion-capture. Il guanto tra l’altro è predisposto per potersi integrare con dei sistemi di force feedback (CyberGrasp™ Cyber Force ™) e un sistema di Tactile feedback (Cyber Touch™) da utilizzare per un’interazione realistica con oggetti realizzati in ambienti virtuali 3D.
1.3 5DT Data Glove Ultra
Il 5DT Data Glove Ultra è stato disegnato per soddisfare le stringenti richieste della moderna animazione professionale e del motion-capture [3]. L’alta qualità dei segnali, la bassa cross-correlazione e l’elevato flusso di dati lo rendono un sistema ideale per l’animazione realistica in realtime. Il Data Glove Ultra è disponibile in una versione a 5 ed una a 14 sensori.
Fig. 1.3: 5DT Data Glove Ultra 14
Il guanto è realizzato in Lycra, garantendone così l’adattabilità per taglie diverse ed è fornito sia per la mano destra che sinistra. Ne esiste anche una versione utilizzabile per la risonanza magnetica. Il collegamento al PC è ottenuto sia via USB che via Bluetooth.
1.4 DG5 VHand 2.0
Il DG5 VHand Glove è un guanto sensorizzato prodotto dalla DGTech Engineering Solutions. La combinazione tra alta risoluzione e basso costo rendono il DG5 una soluzione ottimale per applicazioni in realtà virtuale e motion-capture. La scheda d’acquisizione è stata integrata nel guanto e comunica all’esterno tramite un connettore a 4 vie. Sul guanto sono integrati un sensore di flessione per ogni dito e 3 accelerometri per misurare i movimenti della mano lungo i 3 assi principali e da cui ricavare l’orientazione della mano. È inoltre disponibile un adattatore TTL-Bluetooth con una batteria esterna per effettuare una trasmissione wireless dei dati [4].
Fig. 1.4: Disposizione dei sensori di flessione ed assi principali per gli accelerometri
1.5 P5 Glove
Il P5 Glove [5] è una periferica di controllo per Pc prodotta dalla Essential Reality compatibile con i più diffusi sistemi operativi (Windows, Mac OS, Linux).
Fig. 1.5: P5 Glove
Basato su tecnologie proprietarie sia per i sensori di flessione sia per l’optical tracking, il dispositivo possiede otto trasmettitori ad infrarossi per valutare i movimenti del guanto sugli assi ed eventuali rotazioni e 5 sensori di flessione per valutare la flessione
delle dita. La posizione dei sensori è garantita grazie a degli anelli posizionabili che vanno infilati all'altezza della falangetta. Si è ben lavorato sull'ergonomia: il guanto è semplice e molto rapido da vestire, è molto leggero e dopo averlo regolato si adatta piuttosto bene a mani di varie grandezze.
Il P5 Glove nasce prevalentemente come controller per un’interazione intuitiva in ambiente 3D, ma grazie ai software in dotazione può essere utilizzato anche in modalità Mouse-mode.
1.6 Gypsy-6
Si tratta di un esoscheletro progettato dalla Animazoo [6] per tecniche raffinate di motion-capture in real time e studi di biomeccanica. Il sistema è corredato da 37 potenziometri, 2 giroscopi inerziali e 16 articolazioni sensorizzate per i movimenti di rotazione. All’apparenza ingombrante, in realtà il sistema consente assoluta libertà di
movimento. I punti di misura sono presi dagli arti e non dalle articolazioni e sono posizionati lontano dai muscoli per evitare distorsioni. I sensori possono essere spostati per garantire l’accuratezza della rilevazione indipendentemente dalla taglia del soggetto che lo indossa. Il Gypsy-6 non richiede l’utilizzo né di telecamere né di markers, questo, insieme all’ampio raggio di azione del sistema wireless (fino a 200 m in spazio libero) rende il sistema uno dei più performanti per sessioni di motion-capture e realtime anche quando siano coinvolti più attori.
1.7 IGS-190M (Mobile)
L’IGS-190 [7] è sostanzialmente l’evoluzione del sistema Gypsy dell’Animazoo. Esso quindi mantiene tutte le caratteristiche del suo predecessore incrementandone le prestazioni. Il sistema è costituito da 19 giroscopi inerziali (prodotti dalla Intersense) posizionati su una tuta in lycra.
Fig. 1.6: IGS-190M
Grazie a una velocità di 1200 gradi/sec., i giroscopi sono in grado di gestire gli spostamenti più rapidi senza problemi. I sensori inoltre sono posizionabili in modo da garantire una misura accurata per qualsiasi soggetto indossi l’IGS.
1.8 ShapeWrap III
Anche questo sistema come l’IGS-190, supera l’idea di un esoscheletro rigido per proporre un’architettura più flessibile da utilizzare nelle tecniche di motion-capture. Lo ShapeWrap III [8] è prodotto dalla Measurand ed è basto su degli ShapeTape, ovvero dei sensori flessibili con 6 gradi di libertà (X, Y, Z, roll, yaw, pitch) in grado di seguire i movimenti del corpo umano senza peraltro ostacolarli. Il sistema è completamente modulare e consta di un sensore di orientamento, 2 arm tapes (un tape per ogni braccio fino a coprire i movimenti del polso ,della mano e delle dita ), 2 leg
tapes (uno per ogni gamba che dalla vita seguono il movimento di tutta l’arto fino alla
caviglia e la pianta del piede).
1.9 Sistemi indossabili sviluppati dall’ Università di Pisa
La maggior parte dei sistemi precedentemente illustrati hanno alcuni svantaggio (basso confort, impossibilità di utilizzo per lunghi periodi o in ambienti non strutturati, elevato costo). In questo scenario si affacciano i dispositivi sviluppati dall’Università di Pisa. Questi dispositivi cercano di risolvere gli inconvenienti riscontrati nei precedenti sistemi. Infatti nei laboratori del Centro di Ricerca Interdipartimentale “E. Piaggio” è stata messa a punto una tipologia di sensori tessili in grado di rispondere positivamente a queste esigenze coniugando quindi:
• basso costo • elevato comfort
• possibilità di utilizzo per lunghi periodi ed in ambienti non strutturati (ambiente di lavoro, domestico, ospedaliero, ecc.)
• assenza di connessioni e/o fili metallici in prossimità dell’articolazione da monitorare agevolando il comfort dell’utente.
La tecnologia sviluppata prevede la possibilità di integrare dei sensori direttamente su del comune tessuto elastico, lasciandone inalterate le proprietà meccaniche.
Il sensore integrato è uno strain gauge , un sensore di deformazione che sfrutta le proprietà piezoresistive degli elastomeri conduttore.
Gli elastomeri sono materiali polimerici con una particolare struttura molecolare che ne conferisce spiccate proprietà elastiche. Per loro natura gli elastomeri non sono conduttori, la conducibilità tuttavia può essere loro indotta con l’introduzione di “carbon black” o altre particelle conduttive, che penetrando nella struttura molecolare dell’elastomero gli conferisce proprietà piezoresistive.
Il materiale scelto per la fabbricazione dei sensori è una miscela bi-componente, l’Elastosil LR 3162 AB, prodotta dalla Wacker ltd. Trattandosi di un prodotto commerciale l’azienda produttrice ne garantisce l’assoluta atossicità.
Il processo di realizzazione del tessuto sensorizzato parte quindi dall’individuazione della posizione ottimale dei sensori sul corpo umano per poter monitorare un particolare
arto o un gruppo di articolazioni. Generalmente attorno all’articolazione da monitorare sono integrati un numero ridondante di sensori, in modo da fornire informazione sufficiente per risalire alla postura del soggetto.
Fig. 1.7: individuazione della posizione dei sensori sul corpo
Viene quindi creata una maschera che permetterà di ottenere le corrette dimensioni per sensori e connessioni e la posizione voluta sul tessuto (Fig. 1.8).
Fig. 1.8: maschera dei sensori e connessioni
Si passa quindi alla fase di realizzazione vera e propria; viene preparata una miscela delle due componenti dell’Elastosil LR in rapporto 1:1 con l’aggiunta di
trifluorocloroetilene in quantità variabile a seconda della viscosità voluta. Il composto
così ottenuto viene spalmato sul tessuto attraverso la maschera creata in precedenza. Essendo l’Elastosil un materiale termoindurente il processo di vulcanizzazione dell’elastomero e di cross-link tra tessuto e sensore avviene attraverso riscaldamento del sistema (Fig. 1.9).
Per una descrizione più approfondita della caratterizzazione del sensore e del sistema di acquisizione rimandiamo al Capitolo 2. In questa sede, diamo una breve descrizione dei sistemi già allo stato dell’arte sviluppati dall’Università di Pisa.
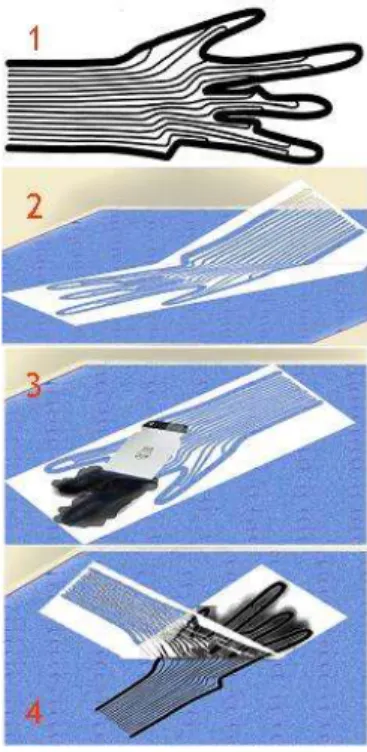
Fig. 1.9: Applicazione di sensori CE su un substrato tessile per la realizzazione di un guanto sensorizzato. 1) La maschera che riporta il disegno dei sensori e delle linee di interconnessione; 2) Applicazione della maschera sul tessuto 3) Il materiale viene depositato sul tessuto ricoperto dalla maschera 4) La maschera viene rimossa.
1.9.1. Upper Limb Kinaesthetic Garment (ULKG)
È una maglia di Lycra per l’estrazione dei parametri cinematici dal movimento dell’arto superiore. L’utilizzo previsto è l’analisi posturale e gestuale a scopi riabilitativi.
Il maggior pregio è la possibilità di indossare il sistema per periodo di tempo prolungati, il che consentirebbe all’equipe medica di poter monitorare il paziente i maniera non invasiva.
Fig. 1.10: prototipo ULKG
L’ULKG può riconoscere con una certa tolleranza l’uguaglianza di due posture, consente la registrazione di un set di posture codificate dallo stato dei sensori. È inoltre possibile riconoscere i movimenti come transizioni tra una postura ed un’altra.
Il prototipo ha mostrato buona ripetibilità anche nel caso in cui la maglia venga tolta e indossata nuovamente.
Fig. 1.11: prove di riconoscimento della postura riprodotte da un avatar
Le applicazioni previste per questo sistema sono nell’ambito dei trattamenti post-trauma a distanza. I soggetti che hanno subito traumi o patologie che ne abbiano minato o ridotto le funzionalità motorie (indebolimento della sensibilità, della percezione, del controllo del movimento) in una prima fase sono sottoposti a protocolli di riabilitazione effettuati direttamente in ambito clinico sotto la supervisione di un fisioterapista. In un secondo momento il paziente, dimesso dalla struttura ospedaliera, dovrebbe svolgere esercizi specifici a casa propria, spesso però la mancanza di una figura professionale o di ausili concreti demotiva le persone dall’effettuare un regolare esercizio. In questo
contesto un sistema come l’ULKG dovrebbe fare le veci di un trainer virtuale che aiuti e solleciti i pazienti ad un esercizio più regolare.
Attraverso un interfaccia user friendly, una volta indossato il sistema, il paziente dovrebbe essere in grado di compiere gli esercizi assegnatigli dal medico e verificare la bontà o meno dei risultati raggiunti.
Si potrebbe inoltre pensare ad un collegamento remoto che metta in contatto, anche in tempo reale, il medico responsabile con il suo assistito, che trasferisca i dati in un data base e consenta allo specialista di poter fornire a distanza una valutazione del lavoro svolto e le eventuali correzioni da effettuare.
1.9.2. Ginocchiera sensorizzata
Per il monitoraggio dell’articolazione del ginocchio sono stati proposti due distinti prototipi per due distinte applicazioni.
Il primo prototipo (Fig. 1.23) consiste in una calzamaglia di Lycra su cui sono stati integrati i sensori necessari per poter riprodurre esternamente l’andamento dei quattro legamenti principali del ginocchio: i due legamenti crociati (linee oblique della maschera) con la funzione di rilevare i movimenti torsionali dell’articolazione, e i due legamenti collaterali (linee verticali) per rilevare i movimenti di flesso-estensione.
Fig. 1.12: Goniocalza
Il prototipo è stato realizzato in collaborazione con la Federazione Italiana Gioco Calcio, con lo scopo di misurare gli angoli e registrare le posizioni critiche è potenzialmente dannose assunte dalle articolazioni nelle sedute di allenamento.
Il secondo prototipo (Fig. 1.25) è stato realizzato per il monitoraggio degli angoli di flesso estensione nell’analisi del passo e presenta oltre alla goniocalza, una scarpa sensorizzata necessaria per indicare il sincronismo con il ciclo del passo. Il sensore della scarpa è un sensore di pressione realizzato sempre con Elastosil LR 3162 posizionato sotto il tallone.
Fig. 1.13: Prototipo per analisi del passo
Fig. 1.14: Scarpa sensorizzata e particolare del posizionamento del sensore
Il prototipo può essere utilizzato per la determinazione del quadro clinico dei pazienti affetti da ulcera venosa, dal momento che tali soggetti mostrano difficoltà nella deambulazione più o meno forti a seconda della gravità della patologia.
1.9.3. Guanto sensorizzato
Il sensing glove è un sistema di 20 sensori di deformazione integrato su un guanto di Lycra. Anche questo strumento è stato pensato principalmente come supporto all’attività di recupero per pazienti con deficit motori delle articolazioni della mano.
Fig. 1.15: Guanto senso rizzato
Assumendo una certa posizione con la mano, indossando il guanto, se il numero dei sensori è sufficiente, è possibile trovare un legame univoco tra i valori assunti dai sensori e la posizione considerata. Si crea così una funzione discreta che associ angoli articolari e valori dei sensori. In questo modo è possibile utilizzare il sistema come registratore di posizione. Un’applicazione di questo tipo può essere utile per monitorare il decorso post-operatorio in pazienti che abbiano subito interventi chirurgici o anche in soggetti tetraplegici in seguito all’impianto di stimolatori muscolari per il recupero di alcune funzionalità basilari (FES, stimolazione elettrica funzionale).
Una applicazione sviluppata nei laboratori del Centro “E. Piaggio” è il riconoscimento da parte del sistema del “American Sign Language” e di un set di prese base della mano (Fig. 1.16).
Fig. 1.16 : Set di posizioni e test effettuato sul riconoscimento della posizione registrata
1.10 Il progetto PROeTEX
Si tratta di un progetto finanziato dalla Comunità Europea mirato al miglioramento delle tecnologie nell’abbigliamento di protezione per operatori di Protezione Civile e Vigili
del Fuoco. Lo scopo è la realizzazione di un set di indumenti “intelligenti” che integrino molteplici funzioni, in grado di garantire una maggiore sicurezza agli operatori dei corpi impegnati in operazioni di soccorso in situazioni di emergenza e/o disastro naturale, e allo stesso tempo di consentire una maggiore efficienza di intervento.
In termini tecnologici si tratta di progettare e realizzare tessuti intelligenti integranti: sensori, connessioni, antenne, sistemi di trasmissione e di alimentazione in grado di compiere le seguenti funzioni:
- monitoraggio costante di segnali biologici dell’operatore; - monitoraggio dei segnali vitali di possibili vittime;
- monitoraggio della postura e del livello di attività dell’operatore; - comunicazioni locali senza fili a bassa potenza;
- monitoraggio della temperatura ambientale;
- riconoscimento di agenti chimici esterni,compresi gas e vapori tossici; - generazione di potenza ed immagazzinamento dell’energia.
Per lo sviluppo del progetto è stato costituito un consorzio di 23 soggetti: quattro università, quattro Istituti di Ricerca, undici partner industriali e tre istituzioni con il compito di convalidare le applicazioni sviluppate nel corso del progetto.
La definizione dei requisiti fondamentali e delle funzioni cui il sistema deve assolvere è stata ottenuta intervistando gli uomini di Protezione Civile (italiana e francese) e del Dipartimento dei Vigili del Fuoco di Parigi su alcuni scenari possibili di grave crisi o disastro naturale.
Il sistema sviluppato (Fig. 1.17) consta di tre capi di abbigliamento:
- un indumento interno (nel seguito indicato come IG, Inner Garment) costituito da una maglia in cotone, lavabile e riutilizzabile che integra dispositivi per il monitoraggio dei parametri fisiologici dell’operatore; - un indumento esterno (OG, Outer Garment). Si tratta di una giacca ignifuga
del tipo in dotazione ai pompieri francesi che integra dispositivi in grado di fornire informazioni sull’ambiente circostante e sull’attività dell’operatore. Inoltre essa ospita anche la Professional Electronic Box (PEB), ovvero la centralina elettronica del sistema che garantisce l’interazione dei sensori dell’IG e OG e si occupa della trasmissione dei dati al controllo remoto;
- un paio di stivali ignifughi che integrino sensori per il rilevamento di sostanze nocive.
Fig. 1.17: I prototipo del sistema PROeTEX
Vediamo più in dettaglio le funzionalità del Outer Garment che è quello maggiormente sviluppato dall’Università di Pisa.
1.10.1. Outer Garment
I prototipi per l’indumento esterno sono stati realizzati integrando i sensori e i sistemi necessari all’interno delle giacche in dotazione ai Vigili del Fuoco francesi e quelle utilizzate dalla Protezione Civile italiana. Salvo alcune differenze tutti i prototipi comprendono l’elettronica per l’elaborazione e trasmissione dei dati (PEB), un sensore per la temperatura ambientale, un sensore chimico per la concentrazione di monossido di carbonio (CO), due accelerometri ed un sensore per la misura dell’attività dell’operatore (sviluppato i sensori CE).
Fig. 1.18: Outer Garment
Lo sviluppo dei sensori di attività è stato eseguito all’interno dei laboratori del Centro “E. Piaggio” dell’Università di Pisa. Sul prototipo sono integrati 2 accelerometri MEMS tri-assiali (ADXL330, Analog Devices Inc.) fissati nel bavero e nella manica sinistra dell’indumento. L’elaborazione è affidata ad un microcontrollore (MSP430F1232 Texas Instruments) posto sullo stesso circuito stampato del sensore. Dai segnali provenienti dai sensori vengono estratti un valore binario indicante l’attività/inattività del soggetto, un indice della postura ed un ulteriore valore binario che segnali una possibile caduta a terra.
Fig. 1.19: sensore di attività realizzato con Elastosil
Oltre agli accelerometri è stato integrato nella giacca un altro sensore di attività realizzato con tecnologia tessile (Fig. 1.19).
Il sensore è costituito da un elastomero conduttore con proprietà piezoresistive (Elastosil LR 3162 A/B). I movimenti del braccio dell’operatore deformando il sensore inducono le variazioni di resistenza nell’elastomero. Il segnale elettrico generato è elaborato da un microcontrollore locale prima di essere inviato al PEB per la trasmissione. La trasmissione remota dei dati è garantita da un modulo WiFi per gli operatori impegnati in spazi più aperti quali Vigili del Fuoco Forestali o Protezione Civile, mentre per i Vigili del Fuoco “urbani” è utilizzata una tecnologia ZigBee.