Capitolo 3
Adattamento d’impedenza dell’antenna
3.1 Breve descrizione della problematica e metodi per attuare
l’adattamento
L’adattamento di una linea è un punto focale per la realizzazione di un dispositivo che funzioni in maniera ottimale senza incorrere in effetti che determinino perdite di potenza e mal funzionamenti. Questi ultimi sono dovuti all’insorgere di onde riflesse di corrente e di tensione e al non totale trasferimento di potenza dal generatore al carico dovuto al disadattamento della linea. Dal punto di vista della potenza irradiata, se esiste un’onda riflessa, una frazione della potenza che viene fornita all’antenna, che può diventare anche drammaticamente rilevante, torna verso il generatore di alimentazione e quindi rimane inutilizzata, determinando scarsa efficienza del dispositivo. L’adattamento di una linea si attua quindi eliminando l’onda riflessa di tensione e corrente.
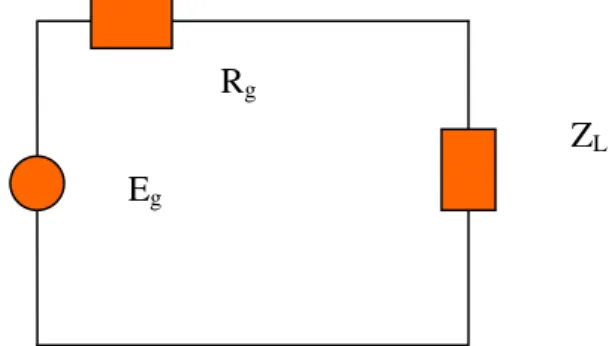
Semplificando, si può schematizzare la struttura globale di un’antenna come un circuito in cui siano collegati in serie il generatore di alimentazione, la sua impedenza interna e un carico complesso (che chiameremo utilizzatore) che rappresenta la struttura che irradia. La figura 3.1.1 rappresenta questa situazione.
Fig. 3.1.1 – Schema di principio che schematizza l’antenna e la sua alimentazione.
E
gZ
LVariando l’impedenza dell’utilizzatore agli effetti esterni si possono eliminare questi contributi riflessi di tensione e corrente. Si attua un cosiddetto adattamento immagine e si eliminano le porzioni di onde riflesse di tensione e corrente quando l’utilizzatore e il generatore vengono ad avere impedenze uguali. Oppure, per garantire il massimo trasferimento di energia dal generatore all’utilizzatore si può attuare un adattamento coniugato: utilizzatore e generatore vengono ad avere impedenze complesse coniugate. I metodi per attuare l’adattamento che sono principalmente usati sono tre:
• trasformatore a λ/4; • stub in serie; • stub in parallelo.
Si trascurerà la descrizione approfondita delle prime due metodologie. Non sono state prese in considerazione poiché la prima è applicabile solo nel caso in cui l’impedenza d’ingresso sia puramente reale e la seconda genererebbe strutture che per questa realizzazione potrebbero portare difficoltà realizzative. Si ricercherà quindi una soluzione per l’adattamento d’impedenza che si avvalga del metodo dello stub parallelo.
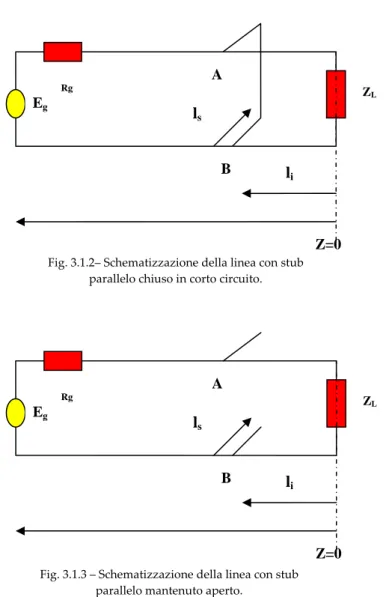
Inserire uno stub in parallelo significa porre in parallelo alla linea che collega l’alimentazione al dispositivo una porzione di filamento (nel nostro caso identico per materiale e raggio della sezione a quello che costituisce l’antenna) in modo che questo nuovo segmento corregga la resistenza e compensi la reattanza dell’impedenza d’ingresso e quindi compia l’adattamento. Questo filamento può essere ai suoi estremi chiuso in corto circuito, come in figura 3.1.2, o mantenuto aperto, come in figura 3.1.3. L’impedenza di una linea chiusa in corto circuito, come anche quella di una linea lasciata aperta, è una grandezza puramente immaginaria.
Poniamo come riferimento l’asse z, parallelo alla linea, che ha origine proprio al livello del carico e ha verso diretto verso il generatore.
Le grandezze da definire per un corretto inserimento dello stub sono due:
• li: è la distanza dello stub dal carico; regolando opportunamente questa grandezza si
può correggere la parte reale dell’impedenza d’ingresso fino a stabilizzarla al valore corrispondente all’adattamento (tipicamente 50Ω).
• ls: è la lunghezza dello stub; regolando questa grandezza si può correggere la parte immaginaria dell’impedenza d’ingresso.
Z=0 ZL Eg Rg ls li
Fig. 3.1.3 – Schematizzazione della linea con stub parallelo mantenuto aperto.
A B Z=0 ZL Eg Rg ls li
Fig. 3.1.2– Schematizzazione della linea con stub parallelo chiuso in corto circuito.
A
La resistenza caratteristica di un filo parallelo al piano di massa in cui la distanza d dal piano sia considerevolmente più grande del raggio r della sezione del filo e considerevolmente più piccola delle dimensione massima w del piano stesso, vale
0
2
60 ln
d
Z
r
⎛
⎞
=
⎜
⎟
⎝
⎠
. (3.1.1)L’impedenza lungo una linea ha un andamento periodico di periodo λ/2 ed è generalmente una grandezza complessa, costituita da un contributo resistivo e uno reattivo, induttivo o capacitivo a seconda del caso. Per una linea con perdite l’impedenza d’ingresso vale:
0 0 0 L in L
Z
Z tg l
Z
Z
Z
Z tg l
γ
γ
+
=
+
. (3.1.2)Per una linea priva di perdite vale γ=jβ. L’impedenza d’ingresso in questo caso diventa
l
tg
jZ
Z
l
tg
jZ
Z
Z
Z
L L inβ
β
+
+
=
0 0 0 . (3.1.3)Un circuito aperto mostra un’impedenza ZL infinita per cui l’impedenza d’ingresso diviene:
0
tan
inZ
Z
j
l
β
= −
. (3.1.4)Un circuito chiuso mostra un’impedenza ZL nulla per cui l’impedenza d’ingresso diviene
0
tan
in
Z
=
jZ
β
l
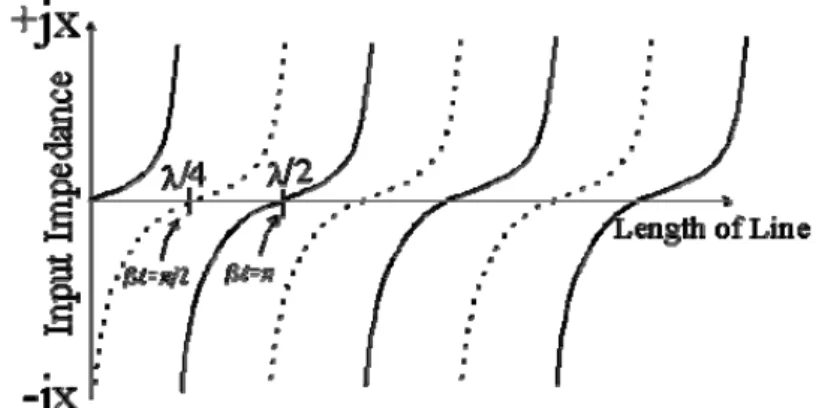
. (3.1.5)In figura 3.1.4 è mostrato l’andamento dell’impedenza d’ingresso di una linea aperta o chiusa in corto circuito.
.
Fig. 3.1.4 – Andamento dell’impedenza d’ingresso di una linea in circuito aperto (linea tratteggiata) e di una linea in corto circuito (linea continua).
Per attuare l’adattamento d’impedenza della struttura allora basterà ricavare la misura della linea e il punto in cui collocarla in modo che si realizzi una ammettenza uguale ed opposta a quella da correggere.
3.2 Stub in circuito aperto e in corto circuito
Si decide di posizionare la struttura di adattamento in modo che un suo estremo combaci con l’estremo superiore del segmento verticale che collega il piano di massa all’antenna e che accoglie l’eccitazione. Lungo questo segmento l’impedenza si mantiene sempre prossima ai valori dell’impedenza d’ingresso.
Il motivo risiede nel fatto che più in basso viene posto lo stub, maggiormente questo risente degli effetti del piano di massa che tende a rendere trascurabili le correnti che lo percorrono e quindi rende minimo il suo contributo d’irradiazione. Questa scelta non contrasta con le specifiche del progetto e anzi, asseconda le necessità di fisica realizzabilità, poiché per motivi di praticità è sempre preferibile porre la rete di eccitazione il più possibile vicina al supporto di massa. Inoltre, è stato verificato che in questa nuova configurazione non cambiano significativamente le proprietà e le caratteristiche elettromagnetiche della struttura.
La scelta del valore 3.7cm non è affatto arbitrario. Per il solver 4NEC2 esso è la dimensione minima che può avere un tag composto tra tre segmenti elementari aventi una sezione di raggio 1.5mm. Per questioni legate a limitazioni del software, di solito è sconsigliabile generare segmenti le cui dimensioni siano minori o uguali a otto volte la misura del raggio (1.2cm). Inoltre, il filo dell’alimentazione deve necessariamente essere costituito da tre segmenti, il medio dei quali ospita l’eccitazione. Violare regole imposte dal software potrebbe farci incorrere in risultati poco attendibili.
L’impedenza Zin di ingresso dell’antenna è pari a 51.7-j15Ω. L’ammettenza d’ingresso, pari al
valore reciproco dell’impedenza d’ingresso, vale
1
1
17.84
0.5176
51.7
15
in inY
j
Z
j
=
=
=
+
−
mΩ-1 . (3.2.1)Lo stub dovrà allora correggere la parte immaginaria dell’ammettenza d’ingresso con un contributo uguale e opposto e quindi dovrà realizzare un’ammettenza pari a
5176
.
0
j
Y
stub=
−
mΩ-1 (3.2.2)o, alternativamente, un’impedenza pari a
1
.
193
1
j
Y
Z
stub stub=
=
Ω. (3.2.3)L’impedenza caratteristica di un dipolo parallelo al piano di massa, posto ad una distanza d molto più grande del valore del raggio della sezione e molto più piccola dell’ampiezza del piano di massa, è calcolabile a partire dalla 3.1.1. Nel caso specifico, in cui il raggio della sezione sia pari a 1.5mm e la distanza dal piano di massa d sia pari a 3.7cm, le specifiche necessarie per l’utilizzo di tale formula sono rispettate e pertanto l’impedenza caratteristica
0 60 ln(49.3) 233.91
Z = = Ω. (3.2.4)
Per ricavare la lunghezza degli stub in circuito aperto e in corto circuito possono essere utilizzate, rispettivamente, le formule 3.1.4 e 3.1.5.
Infatti, mediante pochi passaggi algebrici, è possibile ricavare la lunghezza l dello stub in funzione dell’impedenza caratteristica della linea Z0, della costante di fase β e della reattanza
da realizzare per correggere la linea stessa. Nel caso di stub in circuito aperto, posto ad una distanza di 3.7cm dal piano di massa, la lunghezza della linea diviene
(
)
[
]
m tg j Y Z tg l stub 799 . 1 256 . 1 005176 . 0 91 . 233 1 0 1 = − ⋅ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ = − −β
, (3.2.5)mentre, nel caso di stub in corto circuito alla stessa altezza, diviene
(
)
m
tg
Y
Z
j
tg
l
stub0
.
55
256
.
1
005176
.
0
91
.
233
1
1 0 1=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
−
=
− −β
. (3.2.6)Analiticamente abbiamo quindi ricavato che l’adattamento è possibile attraverso l’inserimento di uno stub in circuito aperto di misura pari a 1.799m o, alternativamente, attraverso uno stub chiuso in corto circuito di lunghezza pari a 0.55m. Questi risultati sono pienamente aderenti alle previsioni poiché il modulo della differenza tra le dimensioni ricavate coincide con il valore teorico di λ/4, pari, nel caso specifico, a 1.25m. Infatti, per una linea di trasmissione, il punto in cui si verifica la condizione di corto circuito dista da quello in cui si verifica la condizione di circuito aperto proprio λ/4.
Abbiamo deciso di effettuare delle simulazioni in cui il solver elaborasse l’impedenza d’ingresso di stub costruiti con le specifiche appena precisate, in assenza dell’antenna. Saremo così sicuri di verificare i risultati ottenuti per via analitica senza avere la possibilità di comportamenti indotti dall’antenna sullo stub che porterebbero a falsare le analisi.
Abbiamo allora generato due file che rappresentassero queste due strutture e abbiamo osservato la loro impedenza d’ingresso.
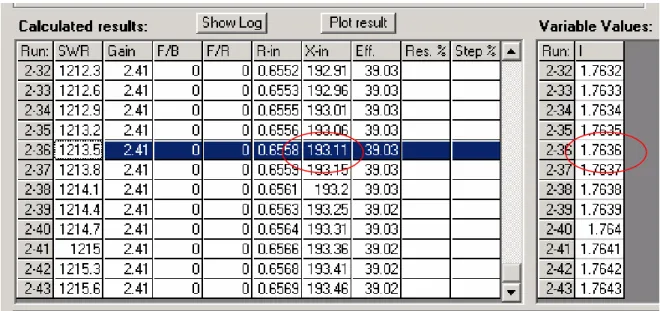
Di seguito sono riportate le schermate relative ai risultati ottenuti (la figura 3.2.1 è relativa allo stub in circuito aperto mentre la figura 3.2.2 è relativa allo stub in corto circuito).
Fig. 3.2.1 - Schermata relativa alla simulazione del solver per la ricerca della misura dello stub in circuito aperto.
Nelle figure precedentemente mostrate sono riportate, assieme alla resistenza di ingresso Rin
e alla reattanza d’ingresso Xin, in ordine, il ROS, il guadagno nella direzione (θ=0°,Φ=0°), il
Rear Ratio, il Back Ratio e l’efficienza percentuale. Il Rear Ratio e il Front-Back Ratio sono fissi al valore nullo perché esclusi per nostra scelta dall’elaborazione, poiché non interessanti ai fini della ricerca, mentre per il guadagno il calcolo viene comunque effettuato automaticamente, così come quello dell’efficienza.
Osservando la colonna relativa alla parte reale dell’impedenza d’ingresso, si nota che questa grandezza ha un valore esiguo; questo avvalora la decisione di porre lo stub più vicino possibile al piano di massa fatta in precedenza, al fine di minimizzare il contributo radiativo della struttura.
In entrambe le figure sono cerchiati i valori della reattanza realizzata, pari a circa 193.1Ω, e le relative lunghezze della linea che realizza tale impedenza. Possiamo affermare che ci sia una certa corrispondenza tra i dati ricavati analiticamente e quelli riportati dal solver. Dal momento che lo stub in corto circuito possiede dimensioni molto limitate rispetto a quelle dello stub in circuito aperto, d’ora in poi ci focalizzeremo sull’analisi di esso poiché comunque una struttura troppo ingombrante porterebbe forti vincoli dal punto di vista dimensionale alla struttura globale, vanificando l’avvenuta riduzione delle dimensioni dell’antenna tramite l’attuazione dei ripiegamenti.
Il prossimo passo sarà quello di connettere la struttura correttrice. Data la concordanza tra i risultati ricavati analiticamente e quelli ricavati tramite solver, possiamo dirci certi del fatto che una struttura con tali specifiche, se non perturbata da effetti indotti, riuscirà a correggere l’impedenza attuando l’adattamento.
Dobbiamo ora fare in modo di porre la struttura ricavata in una posizione angolare idonea, in modo da non sottoporre lo stub a effetti indotti e rendere inattuabile l’adattamento mediante i filamenti ricavati analiticamente e con le simulazioni in assenza dell’antenna. Si rende allora necessario analizzare la geometria della struttura e affrontare la scelta della direzione della retta sulla quale debba giacere lo stub. Esso senza dubbio giacerà sul piano parallelo al piano X-Y passante per l’estremo superiore del segmento di alimentazione. Le spire sono elementi equivalenti a dipoli magnetici. Abbiamo quindi deciso di porre lo stub nella direzione contrassegnata dall’asse x, poiché
• l’interazione tra lo stub e le porzioni oblique congiungenti le spire dell’antenna meandered può essere considerata trascurabile;
• tra una spira e un dipolo elettrico lineare non si determina accoppiamento se i loro assi sono in posizioni parallele.
Alla luce di questi fatti, abbiamo deciso di porre uno stub in corto circuito identico in lunghezza a quello ricavato tramite solver in assenza dell’antenna, dapprima nella direzione contrassegnata dal semiasse negativo x. La lunghezza dello stub, infatti, maggiore della distanza tra i bracci verticali congiungenti l’antenna al piano di massa, renderebbe inattuabile un posizionamento nella direzione contrassegnata dal semiasse positivo x, poiché si verrebbe a creare un’intersecazione tra i filamenti.
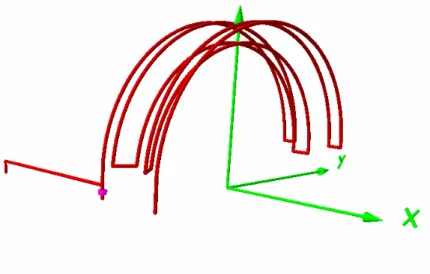
Di seguito è riportata la figura 3.2.3, in cui si mostra un’immagine della struttura comprensiva dello stub in corto circuito. In figura 3.2.4 è rappresentata la schermata riassuntiva di alcune delle sue grandezze elettromagnetiche caratteristiche.
Fig. 3.2.3 - Struttura comprensiva dell’antenna e dello stub in corto circuito dimensionato secondo le specifiche definite dall’elaborazione tramite solver.
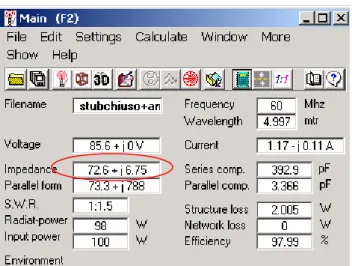
Fig. 3.2.4 - Schermata riassuntiva delle grandezze elettromagnetiche di riferimento della struttura mostrata in fig. 3.2.3.
Come si legge nella casella relativa all’impedenza d’ingresso, la struttura non risulta essere adattata, poiché mostra un’impedenza d’ingresso pari a 72.6+j6.75Ω (in figura 3.2.4 è cerchiata).
Dobbiamo concludere che si vengano a generare dei fenomeni che non erano stati considerati nella fase di studio precedentemente esposto. La presenza dell’antenna rende inefficace l’effetto dello stub , che dalla ricerca analitica e dalla prova in assenza dell’antenna risultava essere il candidato ottimale per la correzione d’impedenza.
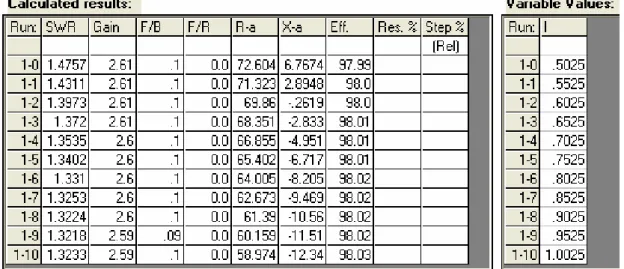
Abbiamo cercato di capire, allora, se si potesse operare sulla lunghezza dello stub in modo da, incrementando il suo valore, ottenere la configurazione che effettuasse l’adattamento. Si riporta di seguito la tabella relativa ai valori della resistenza e della reattanza d’ingresso della struttura globale al variare della lunghezza dello stub (fig. 3.2.5).
Fig. 3.2.5 - Tabella delle specifiche radiative: sulla quinta e sesta colonna sono riportate rispettivamente, la resistenza e la reattanza d’ingresso relative allo stub diretto lungo il semiasse negativo x di lunghezza definita dai valori riportati nell’ultima
colonna
Come si vede, l’incremento della lunghezza dello stub non porta alcun effetto positivo e dobbiamo concludere che non trarremo alcun vantaggio dimensionando diversamente da quanto deciso dopo l’analisi analitica o la simulazione dello stub in assenza dell’antenna esposta in precedenza.
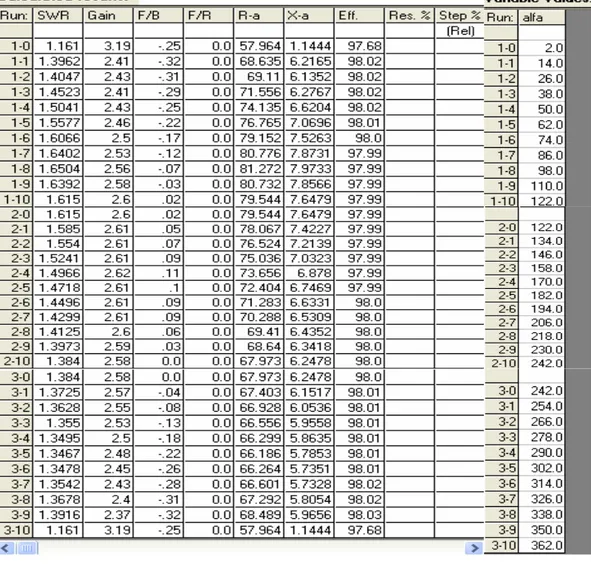
Abbiamo inoltre deciso di generare una scansione angolare i cui esiti verificassero le affermazioni circa la posizione angolare. Questa scansione coprirà quasi un angolo giro; si dovranno escludere le porzioni che diano possibilità di intersezione con il segmento verticale congiungente la struttura al piano di massa che non ospita l’estremo inferiore dello stub. Decidiamo allora che il range angolare sia pari all’intervallo [2°-358°], ricordando che la direzione contrassegnata dal semiasse positivo x corrisponde ad un angolo di 0°.
Fig. 3.2.6 - Schermata relativa alla scansione angolare della struttura comprensiva dello stub in corto circuito dimensionato secondo le specifiche ricavate mediante elaborazione del solver.
Sulla quarta e quinta colonna della tabella di fig. 3.2.6 sono riportate, rispettivamente, la resistenza d’ingresso e la reattanza d’ingresso, mentre nell’ultima colonna si riportano i valori della posizione angolare dello stub che genera tali grandezze per la struttura complessiva.
Si può notare che la direzione in cui ci si avvicina alla situazione di adattamento e’ quella contraddistinta dal semiasse positivo x. Lo stub, quindi, è ancora posizionato nella direzione parallela all’asse della spira, ma invece di essere rivolto verso l’esterno si sviluppa al di sotto della struttura.
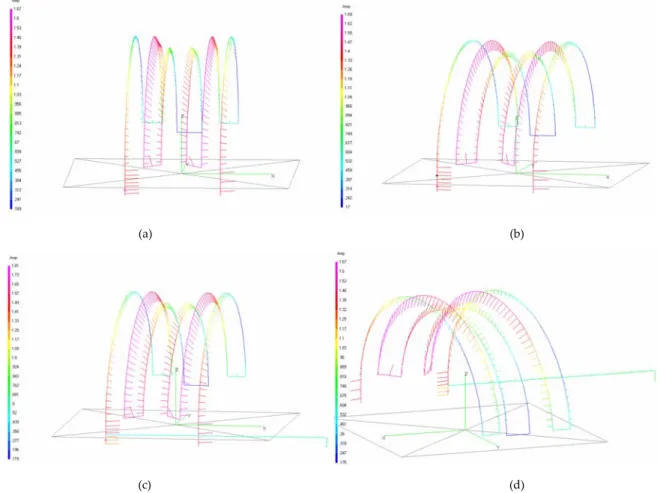
Per capire le ragioni di questo fatto, analizziamo il modulo e le fasi delle correnti sulla struttura in tre casi notevoli: il caso in cui lo stub abbia l’asse parallelo al semiasse negativo x, il caso in cui abbia l’asse parallelo al semiasse positivo x e il caso in cui la correzione sull’impedenza venga effettuata tramite l’inserimento di un carico concentrato in serie con reattanza pari a -15Ω.
Di seguito vengono riportati i grafici delle correnti, espresse in fase e ampiezza, delle tre configurazioni appena definite e di quella originale non sottoposta a nessun processo per l’adattamento (fig. 3.2.7).
(a) (b)
(c) (d)
Fig. 3.2.7 - Immagini delle correnti in intensità e fase sulla struttura priva di correzione mediante stub (a), della struttura corretta mediante inserimento di un parametro concentrato (b), mediante stub diretto lungo il semiasse positivo x (c) e
Sulla struttura mostrata in fig. 3.2.7 (a), come in quella di fig. 3.2.7 (b), l’andamento della corrente non può essere definito simmetrico : in segmenti omologhi, sebbene l’intensità di corrente abbia valori paragonabili, le fasi risultano essere non opposte. L’inserimento dello stub diretto lungo il semiasse positivo x, a differenza di quello diretto nel verso opposto, fa in modo di rispettare in una certa misura la simmetria della struttura e interagisce con essa generando su segmenti omologhi correnti di intensità paragonabile e fasi opposte. In questo modo, tutte le porzioni dell’antenna interagiscono con la struttura corretrice generando effetti dovuti a fenomeni di accoppiamento elettromagnetico che tendono ad annullarsi vicendevolmente.
Per completezza, verrà di seguito esposta la procedura seguita per la ricerca della lunghezza dello stub in grado di correggere effettivamente l’antenna. La ricerca è stata affidata al solver mediante la funzione di ottimizzazione geometrica.
Si è operata la parametrizzazione delle grandezze. In particolare:
• alfa: è stato definito tramite la card SY l’angolo che spazia da 356° a 364° sul piano parallelo al piano X-Y dove è posto lo stub;
• l: è l’effettiva lunghezza dello stub
• rotazx: corrisponde al coseno dell’angolo alfa • rotazy: corrisponde al seno dell’angolo alfa
• cambiox: è la nuova coordinata x dell’estremo parametrizzato dello stub una volta effettuata la rotazione
• cambioy: è la nuova coordinata y dell’estremo parametrizzato dello stub una volta effettuata la rotazione
• segm: è il parametro che determina il numero dei segmenti che sottostanno al vincolo di essere almeno otto volte più grandi della misura del raggio; una cattiva segmentazione potrebbe portare a risultati non attendibili o imprecisi.
Il movimento richiesto è una composizione di rotazione e traslazione; la traslazione è dovuta al fatto che il segmento deve applicarsi all’estremo superiore del segmento di alimentazione che non è posto nell’origine degli assi ma nel punto (-0.106,-0.386,0.037)). Dopo la rotazione, le nuove coordinate (X ,Y) risultano essere pari a
cos(
)
sin(
)
sin(
)
cos(
)
X
x
alfa
y
alfa
Y
y
alfa
x
alfa
= ⋅
− ⋅
⎧
⎨ = ⋅
+ ⋅
⎩
(3.2.6Una volta attuata la traslazione necessaria, le coordinate diventano
⎩
⎨
⎧
−
=
−
=
386
.
0
'
106
.
0
'
Y
Y
X
X
(3.2.7)L’estratto del file che descrive l’operazione codificata per funzionare con il solver è il seguente: SY alfa =356 SY rotazx=cos(alfa) SY rotazy=sin(alfa) SY l=0.05 SY cambiox=l*rotazx SY cambioy=l*rotazy SY segm=int(l/0.012) GW 302 1 -0.106 -0.38599 0.095 -0.106 -0.38599 0.074 0.0015 GW 303 3 -0.106 -0.38599 0.074 -0.106 -0.38599 0.037 0.0015 GW 304 3 -0.106 -0.38599 0.037 -0.106 -0.38599 0.000 0.0015
GW 305 segm -0.106 -0.38599 0.037 cambiox-0.106 cambioy-0.38599 0.037 0.0015
GW 306 3 cambiox-0.106 cambioy-0.38599 0.037 cambiox-0.106 cambioy-0.38599 0.0
0.0015
EX 0 304 2 0 1.0 0.0
Il filamento 305 rappresenta la parte di stub collegata al segmento di alimentazione e parallela al piano X-Y mentre il filo 306 è il tratto parallelo all’asse z che chiude lo stub sul piano di massa con un corto circuito. Come visto precedentemente, la ricerca è stata impostata in modo che alfa variasse all’interno dell’intervallo [356°-364°] e l nell’intervallo [0.05 m-2.80 m]. I valori alfa=356° e l=0.05 m sono stati fissati per l’inizializzazione. Il risultato più promettente, la cui struttura è rappresentata in fig. 3.3.8 è definito dalle seguenti specifiche
• l=0.70342m.
Anche questa soluzione mette in evidenza ottime qualità d’irradiazione. Il Rapporto d’Onda Stazionaria è pari a 1.059 e l’impedenza d’ingresso vale 52.55-j1.5Ω.
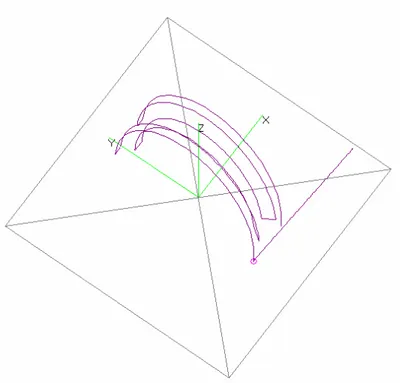
Includiamo la fig. 3.2.8, in cui viene data una visuale della struttura, la fig. 3.2.9 che rappresenta il grafico tridimensionale del pattern, la fig. 3.2.10 descrive l’andamento del ROS e del coefficiente di riflessione nell’intorno della frequenza di risonanza. In fig. 3.2.11 è tracciato l’andamento dell’impedenza d’ingresso nell’intorno della frequenza di risonanza mentre in fig. 3.3.12 è descritta la distribuzione di corrente sulla struttura.
Fig. 3.2.9– Diagramma di irradiazione.
Fig. 3.2.10 – Diagramma dell’andamento del ROS e del Coefficiente di Riflessione dell’antenna dopo l’inserimento dello stub chiuso in corto circuito applicato alla struttura all’altezza verticale di 3.7 cm nell’intervallo frequenziale 54MHz-66MHz.
Fig. 3.2.11 – Andamento dell’impedenza d’ingresso nell’intervallo frequenziale 54MHz-66MHz.
Fig. 3.3.12 – Distribuzione di corrente sulla struttura.
3.3 Miniaturizzazione della struttura correttrice
La ricerca si è mossa in seguito verso una riduzione dell’ingombro della struttura correttrice. In effetti risulta conveniente che lo stub, necessario per l’attuazione dell’adattamento di
impedenza, ponesse vincoli dal punto di vista delle dimensioni della struttura globale il meno possibile .
Si è pensato di applicare anche allo stub la stessa tecnica per la riduzione delle dimensioni utilizzata per l’antenna e quindi si è cercato di creare dei ripiegamenti in modo da garantire la stessa lunghezza elettrica, seppure in uno spazio più ridotto.
Andremo a caratterizzare caratterizzare geometricamente la struttura ripiegata in modo da capire le sue proprietà e caratteristiche radiative.
In figura 3.3.1 sono riportate delle rappresentazioni schematiche di alcune possibili configurazioni della nuova struttura.
(a) (b) (c)
Fig. 3.3.1 – Configurazioni arbitrarie della struttura comprensiva dello stub meandered.
Come è evidente, essendo lo stub costituito adesso da una successione di segmenti filari perpendicolari l’uno all’altro, per forza di cose esisteranno interazioni tra la struttura correttrice e la struttura radiante poiché sarà diffusa la presenza di segmenti rettilinei dello stub non perpendicolari a segmenti rettilinei dell’antenna oppure perpendicolari all’asse delle spire.
a b c
d e f
Fig. 3.3.2– Illustrazione delle due classi di strutture generate suddivise ognuna in tre versioni: a una insenatura (fig. 3.3.2 (a) e (d) ), a due insenature (fig. 3.3.2 (b) e (e)) e a tre insenature (fig. 3.3.2 (c) e (f)).
In entrambe le classi di strutture sono state distinte tre tipologie differenti di configurazioni. La prima classe differisce dalla seconda per il numero di segmenti di lunghezza l e w, rispettivamente di numero dispari e pari nella prima classe e pari e dispari nella seconda classe. All’interno della stessa classe, le tre strutture generate differiscono per il numero di insenature. Si è cercato di generare strutture il più possibile varie in modo da analizzare a fondo le relazioni che intercorrono tra le specifiche geometriche e le proprietà radiative. Per prima cosa, abbiamo cercato di capire quale fosse la relazione tra le dimensioni w e l e le prestazioni degli stub in assenza dell’antenna.
Abbiamo allora fissato arbitrariamente il valore della grandezza w (5 cm) e variato quella di l nel modello rappresentato in figura 3.3.2 (a) in modo che si realizzasse un’impedenza di 193.1Ω, pari a quella necessaria all’adattamento dell’antenna. Dalla tabella riportata di seguito (fig. 3.3.3) ricaviamo che il valore necessario perchè ciò avvenga; esso è pari a 14.79 cm. y x l l l w y x l l l l w l l l l w l l l l l w l l w l l w l l l l l l l
Fig. 3.3.3 - Schermata relativa alla scansione in lunghezza della dimensione l, fissata al valore arbitrario di 5 cm la dimensione w dello stub in corto circuito rappresentato in figura 3.3.2 (a).
Nella quinta colonna sono riportati i valori della reattanza d’ingresso, mentre nell’ultima colonna troviamo i valori della lunghezza dello stub. Come si vede dai dati riportati nella quarta colonna, la resistenza d’ingresso della struttura si mantiene di valore esiguo, in piena aderenza con le previsioni.
Abbiamo allora ricavato, per la stessa struttura, il valore di w, fissato l a 5 cm in maniera arbitraria, che realizzasse lo stesso valore d’impedenza. In questo caso, la dimensione w necessaria perchè avvenga la realizzazione dell’impedenza richiesta per l’adattamento è pari a 22.51 cm. La tabella che segue riporta i dati ricavati dal solver (fig. 3.3.4).
Calcolando la dimensione totale linearizzata troviamo che nel primo caso descritto questa è pari a 54.913 cm, mentre nel secondo caso è pari a 60.02 cm.
È evidente che questa struttura non si comporta come una semplice linea di trasmissione.
Infatti, nei due casi viene realizzato lo stesso valore di impedenza, pur non essendo utilizzato
un filamento di uguale lunghezza complessiva. Lo stub meandered deve allora essere
considerato a tutti gli effetti una struttura elettricamente compatta e quindi, soggetta a
fenomeni di accoppiamento tra le varie porzioni ripiegate.
Analizziamo ora le correnti presenti sulle strutture ricavate. Di seguito riportiamo il grafico dell’intensità e la fase della corrente sulla struttura del modello mostrato in figura 3.3.2 (a) nel caso in cui w sia pari a 5 cm e l sia pari a 14.791 cm (fig. 3.3.4 a) e nel caso in cui w sia pari a 22.51 cm e l sia pari a 5 cm (fig. 3.3.4 b).
Fig. 3.3.4 (b) - Rappresentazione delle correnti presenti sullo stub quando w è pari a 22.51 cm e l è pari a 5 cm.
Dai grafici delle correnti possiamo ancora affermare che la struttura, data la vicinanza dal piano di massa, è percorsa da una corrente di valore molto basso (dell’ordine della decina di mA).
Tra i segmenti costituenti lo stub avvengono dei fenomeni di accoppiamento. In particolare, facendo riferimento alle strutture della prima classe mostrate in fig. 3.3.2 (a), (b) e (c), sui tutti i tratti di lunghezza l la corrente ha la stessa direzione, lo stesso verso e modulo paragonabile, mentre sui tratti di lunghezza w la corrente ha stessa direzione ma verso opposto e modulo di valore pressoché simile. In figura è mostrata una rappresentazione della situazione descritta (fig. 3.3.5).
Fig. 3.3.5 - Rappresentazione del percorso delle correnti nello stub della prima classe di strutture, ad una insenatura.
Le correnti nei tratti verticali mostrati nella precedente figura, essendo di intensità pressoché identica e in controfase, tendono ad annullarsi; lo stesso non può essere detto per i tratti orizzontali, in cui la corrente fluisce nella stessa direzione e nello stesso verso.
Il comportamento delle strutture appartenenti alla seconda classe non possono avere la stessa distribuzione di corrente poiché formate da un diverso numero di segmenti in cui la corrente abbia la stessa direzione e sia in controfase. Le correnti nei tratti verticali, infatti, sono nella stessa direzione ma alternate in verso, seppure di modulo paragonabile, mentre le correnti nei tratti orizzontali sono concordi in verso, direzione e hanno moduli di valore molto prossimo. In questo caso, non ci sono correnti che si compensino in modo da elidersi. La figura 3.3.6 illustra la situazione descritta.
Fig. 3.3.6 - Rappresentazione del percorso delle correnti nello stub della prima classe di strutture, ad una insenatura.
I
I
I
I
I
I
I
I
I
I
È chiaro come in questo caso la direzione privilegiata, quella per cui lo stub possa fuggire gli effetti di accoppiamento con l’antenna, non sia la stessa per le due classi di strutture. In particolare, per la prima struttura è prevedibile che la situazione in cui lo stub e l’antenna siano soggetti al minore accoppiamento mutuo sia quella per cui l’asse della struttura sia parallelo all’asse x. Data la configurazione delle correnti sul filamento da inserire per la correzione, ci aspettiamo che i segmenti verticali, che tendono ad annullare vicendevolmente le loro correnti, potranno posizionarsi nella direzione perpendicolare all’asse della spira senza forti perturbazioni, mentre per le strutture della seconda classe l’individuazione della direzione di minimo accoppiamento non è di facile definizione. Per le strutture della seconda classe, il numero dispari di segmenti verticali non permette l’annullamento reciproco delle correnti, poiché essi risultano percorsi da correnti di uguale intensità e direzione ma verso opposto.
Per verificare quanto detto, abbiamo effettuato una simulazione in cui lo stub rappresentato in figura 3.3.2 (a) potesse ruotare sul piano parallelo al piano X-Y sul quale è posto, per un intero angolo giro. Lo stub è stato dimensionato in maniera arbitraria: si è scelto di fissare entrambe le dimensioni a 5 cm. Tale decisione non porta alla perdita di generalità e permette di ruotare liberamente la struttura anche là dove potrebbe generarsi l’intersecazione con il tratto verticale congiungente l’antenna al piano di massa. I risultati ottenuti sono riportati in fig. 3.3.7.
Fig. 3.3.7 - Tabella riassuntiva dei risultati della scansione angolare dello stub in corto circuito rappresentato in fig. 3.4.2 (a)
Dai risultati mostrati in tabella verifichiamo quanto affermato nelle previsioni: per la struttura mostrata in figura 3.3.2 (a) la direzione in cui si ottengono prestazioni più elevate in termini di adattamento d’impedenza è quella corrispondente all’asse positivo x. come nel caso dello stub lineare, dobbiamo pensare che sia preferito il verso positivo dell’asse x piuttosto che quello negativo perchè posizionandosi in quella direzione, lo stub conferisce ancora una certa simmetria alla struttura, perturbando in misura minore l’antenna.
I risultati ottenuti per quanto riguarda la scansione angolare della struttura mostrata in fig. 3.3.2 (d), la prima della seconda classe, fissati w e l al valore di 5cm, sono riportati in fig. 3.3.8.
Come si vede dai risultati in tabella, la direzione ottimale per l’applicazione dello stub, nel caso in cui si utilizzino strutture della seconda classe, diviene quella attorno al valore di 290˚.
Andando a connettere la struttura correttrice all’antenna, ci aspettiamo, come nel caso dello stub lineare, di non riscontrare l’adattamento andando ad utilizzare uno stub dimensionato secondo le specifiche ricavate dalla simulazione dello stub in assenza dell’antenna. Effettivamente immettendo la struttura correttrice mostrata in fig. 3.3.2 (a), dimensionata fissando i parametri w e l ai valori precedentemente ricavati in modo che la linea possedesse un’impedenza pari a quella necessaria alla correzione e posizionata nella direzione ottimale di 270˚, sull’antenna, non otteniamo la condizione di adattamento.
Si riporta di seguito la schermata relativa ai risultati (fig.3.3.9).
Fig. 3.3.9 - Schermata riassuntiva delle caratteristiche radiative relative alla configurazione dell’antenna comprensiva dello stub mostrato in fig. 3.4.2, diretto lungo il semiasse positivo x; w=5 cm, l=14.791 cm.
Date le premesse, al fine di ricavare le specifiche dimensionali di stub in grado di correggere l’impedenza d’ingresso dell’intera struttura, abbiamo pensato di ricorrere ad una elaborazione del software che ricavasse le grandezze fisiche che portassero ad una configurazione con adattamento d’impedenza.
La procedura attuata può essere riassunta nei punti che seguono:
• parametrizzeremo la loro geometria in modo che possa essere effettuata una scansione sulla posizione angolare della struttura e sulle variabili geometriche;
• effettueremo una ricerca ricorsiva mediante algoritmo genetico della situazione ottimale.
Per quanto riguarda la parametrizzazione, le coordinate dei punti dello stub hanno subito la trasformazione:
cos(
)
sin(
) 0.106
sin(
)
cos(
) 0.386
X
x
alfa
y
alfa
Y
y
alfa
x
alfa
= ⋅
− ⋅
−
⎧
⎨ = ⋅
+ ⋅
−
⎩
. (3.3.1)La trasformazione corrisponde ad una roto-traslazione e non ad una semplice rotazione poiché la struttura correttrice deve essere connessa all’estremo finale del segmento di alimentazione che non è posizionato nell’origine degli assi ma ha coordinate
(-0.106,-0.386,0.0).
Per maggiore chiarezza riportiamo, a titolo di esempio, lo spezzone di filo che riporta i valori parametrizzati delle coordinate della versione in circuito aperto della configurazione dello stub mostrata in figura 3.3.2 (a):
GW 304 3 -0.106 -0.38599 0.037 -0.106 -0.38599 0.0 0.0015 SY alfa=0 SY a=cos(alfa) SY b=sin(alfa) SY l=0.1 SY w=0.1 SY la=l*a SY lb=l*b SY wa=w*a
SY segml=int(l/0.012)
GW 305 segmw -0.106 -0.38599 0.037 wa-0.106 wb-0.38599 0.037 0.0015
GW 306 segml wa-0.106 wb-0.38599 0.037 wa-lb-0.106 wb+la-0.38599 0.037 0.0015 GW 307 segmw wa-lb-0.106 wb+la-0.38599 0.037 -lb-0.106 la-0.38599 0.037 0.0015 GW 308 segml -lb-0.106 la-0.38599 0.037 -2*lb-0.106 2*la-0.38599 0.037 0.0015
GW 309 segmw -2*lb-0.106 2*la-0.38599 0.037 wa-2*lb-0.106 wb+2*la-0.38599 0.037 0.0015 GW 310 segml wa-2*lb-0.106 wb+2*la-0.38599 0.037 wa-3*lb-0.106 wb+3*la-0.38599 0.037 0.0015 GW 311 segmw wa-3*lb-0.106 wb+3*la-0.38599 0.037 -3*lb-0.106 3*la-0.38599 0.037 0.0015 GW 312 segml -3*lb-0.106 3*la-0.38599 0.037 -4*lb-0.106 4*la-0.38599 0.037 0.0015 GW 313 segmw -4*lb-0.106 4*la-0.38599 0.037 wa-4*lb-0.106 wb+4*la-0.38599 0.037 0.0015 GW 314 segml wa-4*lb-0.106 wb+4*la-0.38599 0.037 wa-5*lb-0.106 wb+5*la-0.38599 0.037 0.0015
Dopo aver accuratamente definito i file delle strutture descritte, si è provveduto ad impostare le simulazioni per la ricerca ricorsiva della soluzione ottimale tramite algoritmo genetico. Di seguito verranno riportati e commentati i risultati scaturiti da tale ricerca (fig. 3.3.10). STUB IN CORTO CIRCUITO (prima classe) Ottimizzazione relativa al modello di fig. 3.2.2 (a) Ottimizzazione relativa al modello di fig. 3.2.2 (b) Ottimizzazione relativa al modello di fig. 3.2.2 (c) Rappresentazione della geometria della
struttura ROS 1.006 1.011 1.017 Alfa [deg] 271 269 271 Zin [Ω] 50.3-j0.181 50.6-j0.044 50.6+j0.559 w [cm] 26.18 15.18 11.66 l [cm] 7.2 4.3 3.1
Dim. max. lungo
l’asse [cm] 21.6 21.5 21.7
Ampiezza
[cm] 26.18 15.18 11.66
L equival. Rettilinea
[cm] 73.96 82.22 91.66
Fig. 3.3.10 - Tabella riassuntiva delle variabili geometriche e delle grandezze radiative delle versioni ottimizzate delle strutture mostrate in figura 3.3.2 (a), (b) e (c), nel caso di stub in corto circuito.
STUB IN CORTO CIRCUITO (seconda classe) Ottimizzazione relativa al modello di fig. 3.2.2 (d) Ottimizzazione relativa al modello di fig. 3.2.2 (e) Ottimizzazione relativa al modello di fig. 3.2.2 (f) Rappresentazione della geometria della
struttura ROS 1.0226 1.0291 1.0291 Alfa [deg] 308 300 294 Zin [Ω] 51-j0.49 51.395-j0.4088 50.987-j1.061 w [cm] 19.73 13.43 8.06 l [cm] 8.23 4.57 4.16
Dim. max. lungo
l’asse [cm] 16.46 18.28 24.96
Ampiezza
[cm] 19.73 13.43 8.06
L equival. Rettilinea
[cm] 64.15 85.43 81.38
Fig. 3.3.11 - Tabella riassuntiva delle variabili geometriche e delle grandezze radiative delle versioni ottimizzate delle strutture mostrate in figura 3.3.2 (d), (e) e (f), nel caso di stub in corto circuito.
Come si vede dalle tabelle, le strutture ricavate mostrano caratteristiche radiative ottime e mostrano l’avvenuto adattamento d’impedenza. Per quanto riguarda la posizione angolare, per entrambe le classi, per tutte le varianti appartenenti ad esse, sono state rispettate le previsioni: anche l’elaborazione mediante software ha confermato quanto ricavato in precedenza. Ricordando che lo stub lineare rettilineo in corto circuito ricavato in precedenza misurava circa 70 cm, osservando i valori delle dimensioni complessive lungo l’asse, la riduzione spaziale circa del 75%.
Vengono di seguito riportate le immagini relative alle correnti presenti sulla struttura (fig. 3.3.11).
Ottimizzazione relativa al modello di fig. 3.3.2 (a)
Ottimizzazione relativa al modello di fig. 3.3.2 (b)
Ottimizzazione relativa al modello di fig. 3.3.2 (c)
Ottimizzazione relativa al modello di fig. 3.3.2 (d)
Ottimizzazione relativa al modello di fig. 3.3.2 (e)
Ottimizzazione relativa al modello di fig. 3.3.2 (f)
Fig. 3.3.11 - Distribuzione di corrente sulle sei versioni dell’antenna.
Come si evince dalla figura precedente, lo stub non risulta essere percorso da correnti sostenute e per questo motivo ci aspettiamo che esso non condizioni in alcun modo la radiazione.
3.4 Conclusioni
La struttura presentava la necessità di un adattamento d’impedenza che migliorasse le sue prestazioni. L’attuazione dell’adattamento è stata affidata ad uno stub in parallelo. In prima analisi, sono state ricavate analiticamente le dimensioni degli stub in parallelo in circuito aperto e in corto circuito che sviluppassero un’impedenza tale da riuscire a correggere quella d’ingresso dell’antenna. Si sono poi ricavate le dimensioni degli stub operando una
scansione tramite solver in assenza dell’antenna e queste sono risultate pienamente aderenti a quelle ricavate per via analitica. Si è a questo punto focalizzata la nostra attenzione sullo stub in corto circuito poiché è risultato essere, sia nel caso del calcolo analitico sia dell’elaborazione del solver, quello di dimensioni più ridotte.
Le strutture così dimensionate sono state connesse alla struttura ed è stato notato che le strutture ricavate in precedenza non determinavano la condizione di adattamento. Si è concluso che le discrepanze riscontrate fossero da imputarsi a fenomeni di accoppiamento elettromagnetico che si generavano tra l’antenna e la struttura correttrice.
È stata effettuata una scansione angolare in modo da verificare che la direzione parallela all’asse x fosse quella per cui lo stub fosse soggetto in misura minore ai fenomeni di accoppiamento; lo stub in tale direzione è parallelo all’asse delle spire e questa configurazione garantisce il minore accoppiamento tra stub e antenna.
È stato ricavato che la posizione angolare in cui lo stub risente in misura minore degli effetti indotti dall’antenna sia quella parallela al semiasse positivo x; essa è da preferire a quella parallela al semiasse positivo x poiché la struttura, globalmente, anche dopo l’immissione dello stub mantiene una certa simmetria, cosicché non si generano eventuali perturbazioni nelle correnti. Il dimensionamento dello stub è stato effettuato attraverso una ricerca ricorsiva delle specifiche geometriche e della posizione angolare di stub non più rettilinei ma a struttura ripiegata. Sono state create due classi di modelli che differissero per forma e per numero di insenature, nelle versioni in circuito aperto e in corto circuito. Sono state accuratamente analizzate, in modo da definire le loro proprietà. Abbiamo dimostrato che uno stub a meandri non può essere più considerata una semplice linea di trasmissione ma un’antenna a tutti gli effetti poiché due diverse configurazioni attuano la stessa impedenza pur utilizzando un filamento di lunghezza complessiva diversa. Sono state fatte delle considerazioni qualitative sulla posizione angolare più adatta in cui porre le strutture correttrici, mentre le dimensioni degli stub capaci di correggere l’impedenza d’ingresso dell’antenna sono state elaborate dal solver.