Capitolo 5
Creazione del modello per l’analisi CFD
5.1. Generalità
La creazione di un modello CFD per lo studio di moti esterni, come nel caso in esame, comporta la costruzione di uno o più volumi di controllo all’interno dei quali viene posizionato quello che è l’oggetto dell’analisi fluidodinamica.
Il kayak rappresenta una sorta di “ostacolo” per i flussi di aria e di acqua che sono costretti a passare attorno al suo profilo: lo scafo viene mantenuto fermo e i due fluidi vengono fatti muovere in direzione dello scafo con una velocità pari a 5 m/s.
La costruzione della griglia e la successiva mesh rientrano nella cosiddetta fase di Pre-processing e sono state eseguite con il software di modellazione Gambit11.
5.2. Creazione della griglia
5.2.1. Importazione del modello Pro-E
La dimensione della griglia, e quindi del volume di controllo, è la prima decisione che deve essere affrontata nella creazione della mesh ed è uno dei fattori più importanti. Infatti da essa dipende il numero di celle presenti nell’intero dominio fluido, limitato superiormente dalla memoria del calcolatore (o dei calcolatori) impiegato per la simulazione.
La dimensione e la conformazione della griglia sono state stabilite in base al numero massimo di celle che potevano essere trattate. Avendo a disposizione due Personal Computer Pentium 4 2.8 GHz con 2 Gb di RAM collegati in parallelo, il numero massimo dei celle per la simulazione turbolenta (quella che richiede più memoria) è stato valutato attorno ai 3 milioni. Quindi sono state costruite griglie con un numero di celle prossimo a tale valore per ricercare una migliore accuratezza della soluzione numerica.
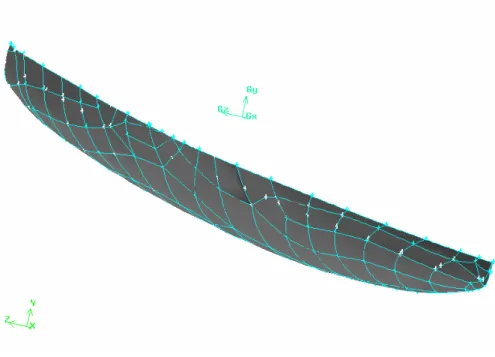
Una difficoltà aggiuntiva è derivata dal processo di importazione in Gambit del modello Pro-E. In Figura 5.1 è rappresentato il modello IGES appena importato in Gambit: si può notare che anche durante la fase di rielaborazione in Pro-E e successiva esportazione, il modello non ha perso le informazione sulla geometria delle superfici che aveva in origine. Inoltre ha creato il raddoppio (perdita) di aree e seguenti, che necessariamente sono stati eliminati (creati) nel corso del controllo effettuato sulla superficie. La presenza di superfici di forma irregolare ha creato molteplici problemi tra i quali:
- la necessità di disporre e dimensionare le celle in base a vincoli geometrici piuttosto che a criteri di qualifica del calcolo fluidodinamico;
- la presenza di celle distorte, con conseguenti problemi di instabilità del calcolo; - l’impossibilità di usare elementi esaedrici, ma solamente tetraedrici
Figura 5.1 – Modello IGES della superficie del kayak.
L’operazione di importazione fornisce la superficie esterna dello scafo. Per poter costruire il dominio fluido intorno ad esso, è necessario “trasformarlo” in un volume per poi “sottrarlo” al volume esterno. A tal fine è stata creata una superficie superiore piana e una superficie laterale, disposta sul piano di simmetria.
5.2.2. Creazione del dominio fluido
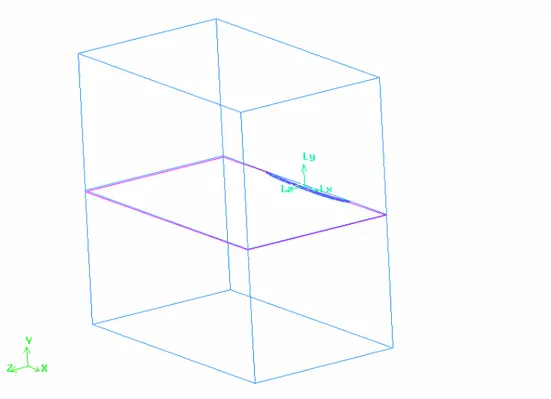
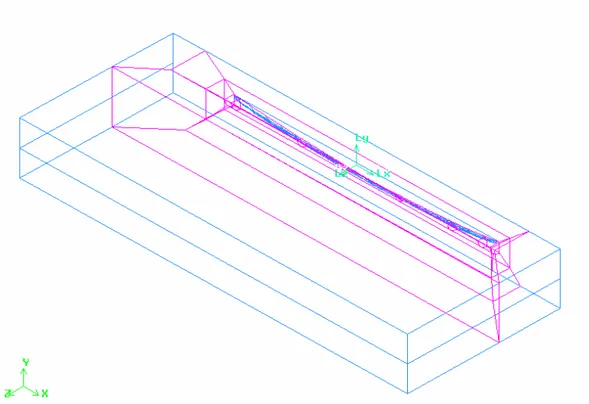
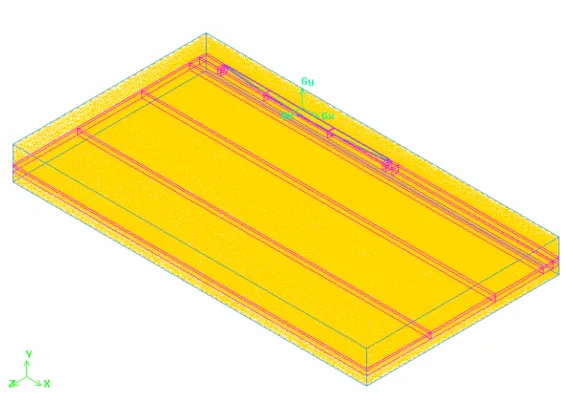
Un primo tentativo di dominio fluido è quello riportato in figura 5.2.
Figura 5.2 – Dominio fluido di tentativo.
Il kayak è stato posizionato sul baricentro di una faccia di un parallelepipedo che rappresenta l’intero dominio fluido (aria e acqua), e da esso è stato sottratto.
Le dimensioni di questo parallelepipedo di prova sono le seguenti: 10x10x5 m3. Questi valori di tentativo sono stati modificati sulla base dell’effettiva influenza del contorno sulla soluzione.
5.2.2.1. Scelta dei volumi
La dimensione delle celle in prossimità dello scafo, affinché la “mappatura” riproduca adeguatamente la superficie originale, deve essere compresa fra 0.005 e 0.001 metri nelle zone “più critiche”, ovvero nei settori di prua e di poppa, dove la curvatura aumenta in modo repentino. Soprattutto nella zona di prua la mesh deve essere sufficientemente fitta, dato che sono necessarie molte più celle per riprodurre lo scontro ed il cambio di direzione della
corrente indisturbata. Una mesh uniforme con dimensioni delle celle pari a 5 mm
comporterebbe un numero complessivo di 3
9 5 10 ) 5 10 10 ( ⋅ ⋅ ⋅
elementi, ben superiore alla capacità di calcolo di due PC (4 miliardi di elementi contro i 3 milioni ammissibili).
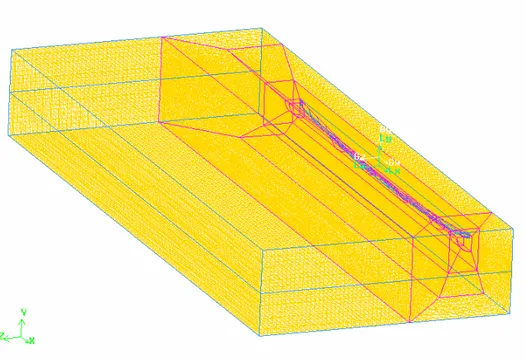
Per creare una griglia più grossolana lontana dallo scafo sono stati creati dei sottovolumi opportuni potendo così controllare l’infittimento progressivo dei nodi (Figura 5.3).
Figura 5.3 – Dominio fluido con sottovolumi al suo interno.
Dei sottovolumi sono stati creati intorno al kayak, per soddisfare i vincoli imposti dalla presenza delle aree irregolari, e variazioni di curvatura presenti nel modello.
Per prevenire, una disposizione ed una rastremazione inadeguata delle celle, sono state creati degli opportuni sottovolumi, non solo nella zona dello scafo, ma anche nel resto del dominio, come si osserva nella Figura 5.4.
Figura 5.4 – Infittimento della mesh.
In questo modo è possibile infittire progressivamente le celle, definendo una opportuna distribuzione di nodi sugli spigoli ed effettuare la mesh separatamente in ogni singolo settore.
5.2.2.2. Presenza del piano di galleggiamento
La seconda problematica è legata alla presenza o meno della superficie di galleggiamento cioè di una prima configurazione imperturbata rappresentata da un piano interno al dominio (figura 3.5). Nella definizione del problema multifase, è infatti possibile trattare le due zone aria e acqua sia come regioni distinte geometricamente sia come parte dello stesso volume. Nel primo caso è necessario dividere l’intero dominio fluido in due volumi distinti
direttamente in Gambit e impostare la presenza di fluido aria in quello superiore e di acqua in quello inferiore come condizione iniziale. Nel secondo caso invece il volume è unico per entrambi i fluidi, e le due zone sono distinte soltanto come condizione iniziale tramite il comando “Patch” in Fluent12. Una parte del capitolo 6 sarà dedicata all’analisi di sensibilità dei risultati ottenuti utilizzando le due diverse configurazioni del dominio.
Utilizzare un approccio può comportare differenze nei risultati: infatti nella creazione della mesh di un volume unico o di due volumi separati la distribuzione delle maglie in prossimità del piano di galleggiamento si modifica. Come si può notare dal confronto, riportato in Figura 5.5 e Figura 5.6, nella griglia con i due volumi separati anche le celle riempite di aria sono distinte da quelle riempite da acqua, non si ha nessuna cella a cavallo del piano di galleggiamento. La presenza di celle a cavallo del piano di galleggiamento aumenta la diffusività di una fase nell’altra.
Figura 5.5 - Vista laterale della griglia con piano di galleggiamento
Figura 5.6 - Vista laterale della griglia senza piano di galleggiamento
I vantaggi che comporta la presenza del piano di galleggiamento legati alla separazione dei fluidi sono mitigati dagli svantaggi nella concentrazione della mesh sulla superficie del kayak.
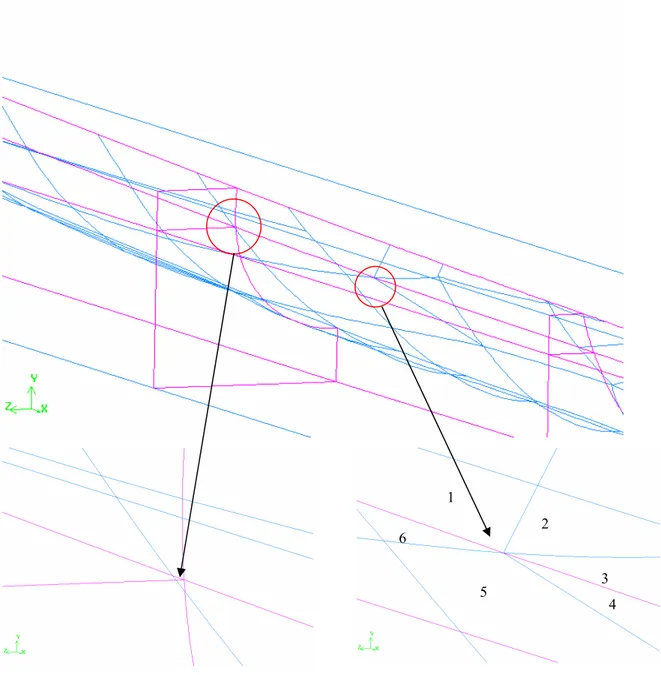
Effettuando la separazione fra la zona riempita da aria e quella riempita da acqua alcune superfici del kayak sono tagliate in due parti. Tale separazione introduce ulteriori “irregolarità” (vedi Figura 5.7) che possono portare ad un’eccessiva distorsione delle celle fluide, e quindi possibili instabilità nel calcolo
Nascita di celle di piccole dimensioni Vertice in comune a 6 superfici
Figura 5.7 – Irregolarità che si manifestano sulla superficie del kayak.
5.2.2.3. Ottimizzazione del dominio
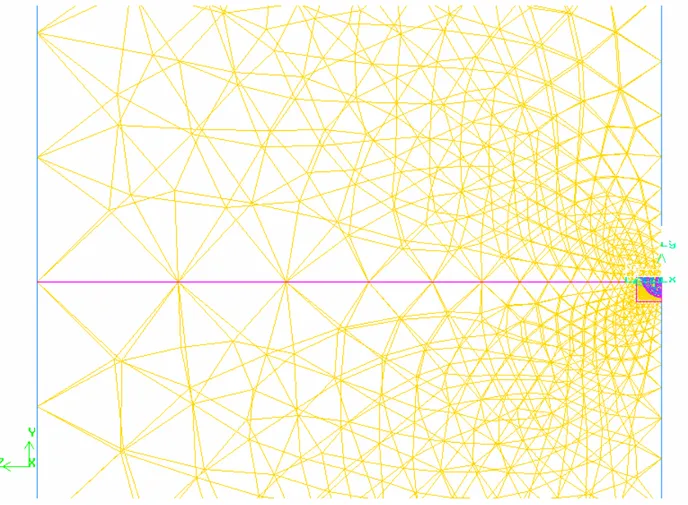
La griglia mostrata in Figura, a cui si era arrivati dopo una serie di considerazioni legate principalmente ai criteri “geometrici” della mesh, non è però una soluzione ottimale per l’analisi e CFD. Poiché il numero delle celle è limitato, è necessaria una fase di ottimizzazione della griglia, distribuendo più opportunamente queste celle. Il discorso è
1 2 3 4 5 6
analogo a quello che viene fatto nelle verifiche meccaniche tramite FEM: per un provino forato nel mezzo e soggetto a trazione, ad esempio, sarà opportuno infittire gli elementi in prossimità del foro, dato che le tensioni di entità maggiore sorgeranno in quella zona. Applicando lo stesso principio al problema CFD in esame, le celle devono essere infittite maggiormente in prossimità del kayak per mettere in luce la generazione di fenomeni ondosi provocati dall’avanzamento del kayak ed in prossimità della superficie di galleggiamento.
Tali necessità sono state soddisfatte riducendo le dimensioni del dominio di calcolo. Con i primi calcoli si è verificato che l’estensione della mesh per 5 metri al di sopra del piano di galleggiamento era eccessiva; le celle posizionate più in alto non danno contributi al calcolo. Lo stesso vale per il volume al di sotto del piano di galleggiamento. Quindi si è passati da 10 metri iniziali in altezza a circa 2. La griglia che si ottiene in questo modo è rappresentato nella seguente Figura 5.8.
Figura 5.8 – Secondo tentativo della griglia.
Eliminando i volumi molto distanti dal piano di galleggiamento è stato possibile disporre di un maggior numero di elementi nella zona centrale (Figura 5.9).
Sarebbe stato possibile ridurre ulteriormente il volume occupato dall’aria, poiché la resistenza da esso indotta è trascurabile. Tale operazione di aggiustamento non è stata eseguita perché sulla superficie superiore del kayak importato come IGES sono presenti
superfici distorte che generano celle svergolate; poiché problemi di stabilità si sono evidenziati già in tale configurazione non si è ritenuto eseguire ulteriori prove.
Figura 5.9 –Mesh relativa alla griglia di secondo tentativo.
Al contrario ulteriori aggiustamenti sono stati eseguiti in considerazione delle seguenti riflessioni. Il fenomeno di principale interesse è legato alla generazione delle onde, soprattutto quelle divergenti dato che il loro contributo nella resistenza complessiva è maggiore rispetto a quelle trasversali. Inoltre per le condizioni di navigazione imposte al kayak si genera una sola onda di prua e una di poppa. Su tale base sono state apportate le seguenti variazioni all’ultimo modello:
- il kayak è stato traslato “in avanti” nel dominio fluido, ossia in direzione negativa dell’asse x del sistema di riferimento; così facendo è possibile analizzare in modo più corretto il comportamento del kayak nella zona posteriore alla poppa, e restringere la zona anteriore alla prua che non ha interesse pratico, dato che il fluido non ha ancora incontrato lo scafo ed è imperturbato.
- il volume di fluido è stato allargato in direzione z (da 5 a 7 metri circa): questo per agevolare ancor di più la generazione delle onde trasversali senza che vengano influenzate dalle condizioni al contorno della griglia.
Le modifiche subite dal modello nel passaggio da una griglia all’altra sono evidenziate in Figura 5.10. In Figura 5.11 è riportata la griglia definitiva.
Figura 5.10 – Aggiustamenti finali della griglia.
5.2.3. Fase di mesh
Una volta definito il dominio e tutti i sottovolumi che la costituiscono, è possibile passare alla successiva fase di mesh. La griglia è stata fatta seguendo questa procedura:
1) mesh di tutte le superfici che costituiscono il kayak; 2) mesh di tutti i volumi del dominio.
5.2.3.1. Mesh del kayak
La mesh del kayak è stata costruita manualmente sulle superfici e per superficie. Taòe operazione è stata necessaria poiché le superfici sono irregolari, di forma diversa e variando il numero e le dimensioni delle celle da impiegare e cercando di rendere graduale il passaggio da elementi piccoli ad elementi più grandi. Le dimensioni dei lati delle celle triangolari passano da 0.001 metri nelle zone di prua e di poppa fino a 0.004/0.005 nella parte centrale del kayak. Nelle seguenti Figure 5.12, 5.13, 5.14, 5.15 si riporta la mesh eseguita in tre zone lungo il kayak.
In Figura 5.12 è rappresentata la zona di prua: le celle situate verso l’estremità hanno lati con dimensioni di circa 1 mm, per poi diventare 2 mm sulle superfici adiacenti.
Figura 5.12 – Prua. 1 mm
Figura 5.13 – Scafo in prossimità della prua.
Figura 5.14 – Scafo in prossimità della poppa.
Figura 5.15 – Poppa. 2 mm 5 mm 5 mm 2 mm 2 mm 1 mm
5.2.3.2. Mesh del dominio fluido
Una volta discretizzata la superficie del kayak, la fase successiva è la mesh di tutti i volumi che costituiscono il dominio fluido. Dato che la mesh effettuata sulla superficie del kayak è molto fitta, inevitabilmente i volumi adiacenti allo scafo devono avere celle con dimensioni dello stesso ordine di grandezza, poiché nel passaaggio dagli elementi più piccoli a quelli più grandi, deve essere graduale per non commettere errori legati alla distorsione degli elementi stessi. Nel caso in cui le limitazioni “geometriche” della superficie del kayak non fossero presenti, in ogni caso sarebbe stato necessario disporre celle di dimensioni contenute in prossimità dello scafo. In questo caso però la loro grandezza sarebbe stata ottimizzata sulla base dell’accuratezza del calcolo fluidodinamico.
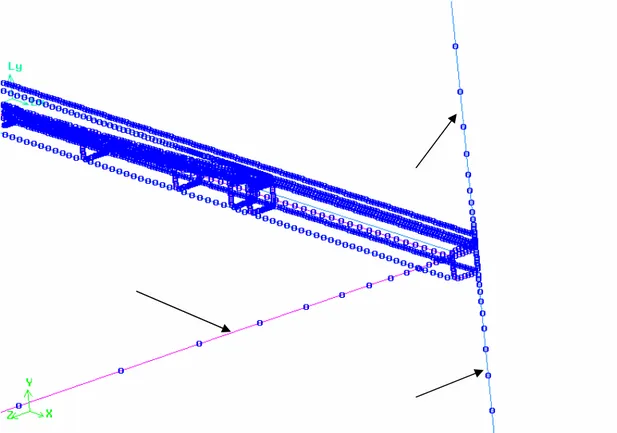
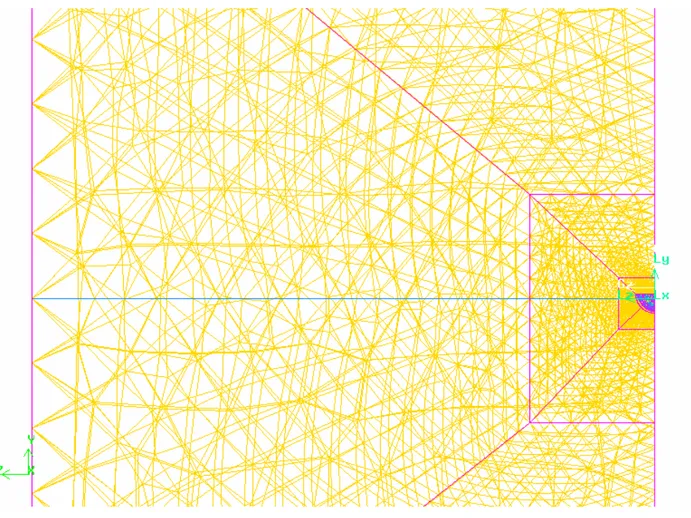
La dimensione delle celle nei volumi del dominio aumenta progressivamente allontanandosi dallo scafo fino a raggiungere un valore di 0.01 metri (10 mm).
In Figura 5.16 è riportato, ad esempio, l’aumento progressivo nella zona di poppa.
Figura 5.16 – Dimensioni delle celle del volume nella zona di poppa.
I valori riportati in Figura 5.17 sono riferiti alla dimensione massima in direzione z (ortogonale al moto del fluido) di una cella in ogni volume misurata sul piano di
10 mm 1 mm
galleggiamento. La lunghezza degli spigoli orientati in direzione z dei parallelepipedi in questione è pari a 2 metri.
Figura 5.17 – Dimensione delle celle al variare della distanza dallo scafo.
5.3. Costruzione del modello con piano di galleggiamento
E’ stato desritto fino ad ora il procedimento di creazione della mesh del modello senza piano di galleggiamento. Come scritto in precedenza, spezzando il kayak con una linea di galleggiamento, si creano superfici molto piccole, di forma non regolare e difficilmente discretizzabili. Poiché gli elementi molto piccoli e distorti sono la causa principale della divergenza del calcolo, anche in tale complicazione gli sforzi maggiori nella costruzione della mesh nella zona centrale possono non essere sufficienti.
Quindi si è scelto di costruire ex-novo il modello CFD del kayak, partendo comunque dalla superficie reale acquisita come nuvola di punti ed inserendo il piano di galleggiamento.
La procedura seguita si può dividere in due fasi: una prima fase di modellazione della superficie e una seconda fase di mesh.
Nella prima fase il modello acquisito è stato importato in PRO-E ed ha subito i trattamenti come descritti nel capitolo 3 (spostamento del sistema di riferimento, taglio della parte di
20 mm 50 mm
80 mm
100 mm
sopra, ecc.). A questo punto, come mostrato nella Figura 5.18, sono state effettuate circa 50 sezioni con piani perpendicolari all’asse del kayak.
Figura 5.18 – Piani con cui è stata sezionata la superficie.
Da ogni sezione è possibile ricavare il contorno del kayak, quindi complessivamente si ottiene il profilo rappresentato in Figura 5.19. L’intervallo fra una sezione e la successiva è di circa 100 mm, tranne nelle zone di estremità dove il valore diminuisce.
Le sezioni hanno lo scopo di definire il profilo dello scafo per creare un nuovo modello 3D. Il nuovo kayak è riportato in Figura 5.20.
Figura 5.20 – Modello 3D del kayak ricostruito.
Quest’ultimo modello contiene alcune differenze geometriche rispetto all’altro. La prima, trascurabile, è relativa alla modellazione alle estremità: la prua e la poppa nel nuovo modello sono un po’ più spigolose rispetto a prima, ma dove il kayak è a contatto con l’aria: quindi anche una lieve modifica della geometria non è importante ai fini dei risultati.
La seconda è una possibile differenza nella superficie, che non è più di classe C2. Eventuali differenze rispetto alla superficie reale sono in ogni caso, di minore entità rispetto a quanto risulta dall’operazione di discretizzazione per il modello numerico, che comunque modifica entrambi i modelli.
La seconda fase, relativa alla creazione della griglia, è analoga a quella già vista per la mesh del modello IGES. L’unica differenza è che lo scafo stavolta è formato soltanto da un numero inferiore di superfici e di forma regolare (Figura 5.21).
Figura 5.21 – Volumi della griglia vicini alla superficie del kayak.
In questo caso la creazione della mesh è molto più semplice: grazie alle maggiore regolarità delle superfici è stato possibile costruire la griglia attorno al kayak su volumi più grandi rispetto al caso precedente, con notevoli risparmi a livello di tempo nell’intera operazione ed ottimizzazione del modello
Nei seguenti capitoli 7 e 8 si riportano i risultati dei calcoli fluidodinamica eseguiti con: - modello acquisito con superfici provenienti direttamente dalla scansione e griglia senza piano di galleggiamento.
- modello ricostruito in PRO-E e griglia con piano di galleggiamento.
5.4. Condizioni al contorno
Le condizioni al contorno (o “boundary conditions”) sono state assegnate direttamente in Gambit, prima dell’esportazione della mesh, per quanto sia possibile cambiare in Fluent, poiché la loro definizione dipende dal problema fisico (vedi capitolo 7). Con riferimento alla generica configurazione del dominio di calcolo (Figura 5.22), le condizioni al contorno impostate in Gambit sono le seguenti:
- Lato superiore, lato inferiore e superficie laterale: parete (“WALL”) - Piano meridiano del kayak: piano di simmetria (“SIMMETRY”) - Ingresso aria e acqua: velocità imposta (“VELOCITY INLET”) - Uscita aria e acqua: pressione costante (“PRESSURE OUTLET”) - Kayak: parete (“WALL”)
Figura 5.22 – Condizioni al contorno.
Piano di simmetria Uscita aria Uscita acqua Ingresso aria Ingresso acqua Lato superiore Lato inferiore Superficie laterale Kayak
Nel caso della griglia con piano di galleggiamento la mesh una superficie interna aggiuntiva (“INTERIOR SURFACE”), ed i volumi superiori e quelli inferiori sono identificati separatamente per semplificare la formulazione della condizione iniziale.
A questo punto, una volta che la mesh è stata creata e le condizioni al contorno sono state impostate, il modello è pronto per essere importato nel codice CFD Fluent, esportando il modello in un file .MSH.