1. CAPITOLO 1
N
OZIONI DIB
ASELa scienza delle telecomunicazioni studia i metodi per trasmettere a distanza informa-zioni sotto forma di impulsi elettrici o di segnali. La sua storia è legata all’età contempora-nea ed i risultati raggiunti negli anni rappresentano la vincita di una sfida che ha avuto e-normi implicazioni culturali.
Le onde elettromagnetiche si sono rivelate un vettore formidabile per la trasmissione di informazioni, come per l’esplorazione dell’ambiente che ci accoglie. Le proprietà che le caratterizzano consentono loro una efficace propagazione in aria come nel vuoto, consen-tendo all’uomo di sfruttare le onde elettromagnetiche anche per l’esplorazione dello spazio.
Ma i sette decimi della superficie terrestre sono ricoperti dall’acqua, un mezzo che non consente una efficiente propagazione dell’onda elettromagnetica. Le onde sonore sono ad oggi l’unico mezzo attraverso cui trasmettere a distanza informazioni sott’acqua.
La facilità con cui l’onda acustica si propaga in acqua era stata notata ancora prima del-la scoperta dell’America, nel 1490, da Leonardo da Vinci1
Il parametro che determina la scelta dell’energia acustica come forma di energia impie-gabile in acqua è la distanza di penetrazione.
L’energia elettromagnetica ha una velocità di propagazione elevata sia in aria (3⋅108 m/s), che in acqua (1571⋅ f m/s) [4, pag. 1-2]; ma ha uno scarso potere di penetrazione in acqua, il che causa perdite per propagazione in acqua di 1400⋅ f dB/km [5, pag. XIV, 38], dove f è espresso in kHz. Questo significa che anche a bassa frequenza, le perdite
vute alla sola propagazione siano enormi, 7.700 dB/km con una frequenza di 30 kHz, ov-vero una perdita di 770 dB in un percorso di soli 100 m!
L’acqua ha un enorme potere dissipativo per l’energia elettromagnetica, le cui onde vengono attenuate con estrema rapidità, caratteristica che limita la loro utilità in tale mez-zo.
L’energia acustica ha una velocità di propagazione relativamente bassa in acqua (da 1460 m/s a 1555 m/s in acqua di mare [21]), ma una significativa penetrazione in acqua (può arrivare fino a diverse migliaia di chilometri).
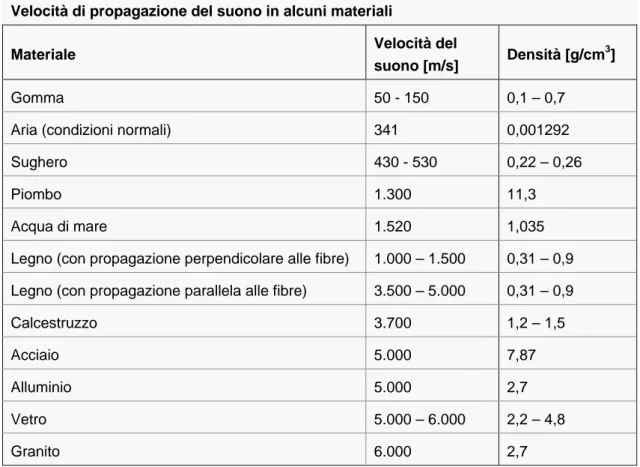
Velocità di propagazione del suono in alcuni materiali
Materiale Velocità del
suono [m/s] Densità [g/cm
3
]
Gomma 50 - 150 0,1 – 0,7
Aria (condizioni normali) 341 0,001292
Sughero 430 - 530 0,22 – 0,26
Piombo 1.300 11,3
Acqua di mare 1.520 1,035
Legno (con propagazione perpendicolare alle fibre) 1.000 – 1.500 0,31 – 0,9
Legno (con propagazione parallela alle fibre) 3.500 – 5.000 0,31 – 0,9
Calcestruzzo 3.700 1,2 – 1,5
Acciaio 5.000 7,87
Alluminio 5.000 2,7
Vetro 5.000 – 6.000 2,2 – 4,8
Granito 6.000 2,7
Tabella 1.1 – Caratteristiche acustiche di alcuni materiali
L’acqua è un elemento estremamente più efficace dell’aria, come mezzo di propagazio-ne per l’epropagazio-nergia acustica. Per il fatto di avere una densità 800 volte superiore a quella dell’aria, l’acqua consente al suono di viaggiare ad una velocità da quattro a cinque volte più elevata che nell’aria.
Si tratta di un effetto immediatamente verificabile dall’esperienza comune: in aria la di-rezione di provenienza di un suono è facilmente identificabile, in acqua no. La provenienza di un suono si determina misurando inconsciamente la differenza di tempo in cui il suono arriva alle due orecchie. In acqua questa differenza temporale non è misurabile per l’elevata velocità a cui si propagano le onde acustiche.
1.1 La propagazione del suono: l’onda acustica
Il suono è un fenomeno fisico, prodotto da un oggetto che vibra, generando una serie di onde di pressione nel mezzo di trasmissione, che alternativamente causano la compressione e la rarefazione delle molecole d’aria, acqua o mezzo solido attraverso il quale viaggiano.
In assenza di materia, “nel vuoto”, non si ha alcuna emissione acustica.
Un’onda acustica viene prima di tutto emessa. Si ha la formazione di un suono in acqua nei seguenti casi:
quando un gas cambia improvvisamente di volume (esplosione subacquea, libera-zione di gas da sacche geologiche, esplosione di bolle di gas);
quando vengono generati dei vortici (oggetti solidi che si muovono in acqua posso-no generare vortici);
quando c’è movimento di masse d’acqua (correnti, maree);
quando le oscillazioni di corpi solidi quali eliche e motori si trasmettono al fluido circostante.
Dopo l’emissione ha luogo la propagazione, il feno-meno mediante il quale l’energia acustica irradiata dalla sorgente, viene trasmessa nel mezzo di propagazione attraverso il continuo alternarsi di energia potenziale ed energia cinetica, secondo fronti d’onda sferici:
potenziale cinetica
acustica E E
E = +
La propagazione dell’onda acustica causa quindi un certo flusso di energia, per quantificare il quale vengo-no introdotti i concetti di lavoro compiuto dall’onda a-custica, potenza acustica istantanea, intensità acustica istantanea e intensità acustica, che portano alla defini-zione della reladefini-zione fondamentale dell’elettroacustica.
Per le onde acustiche piane, lo spostamento delle particelle indotto dal segnale acustico è associato ad una piccola variazione di pressione, secondo la legge [1, pag. 11]:
u c
p =ρ⋅ ⋅ (1.1)
che esprime la proporzionalità diretta della pressione dell’onda acustica piana (p) con la densità del fluido (ρ), la velocità di propagazione dell’onda nel fluido (c) e la velocità di spostamento delle particelle di fluido (u, di cui si darà una definizione rigorosa nel segui-to).
fig. 1.1 – Propagazione dell’onda acustica
Le fluttuazioni di pressione indotte dall’onda acustica vengono tipicamente rilevate tramite strumenti in grado di convertirle in segnali elettrici. Questi strumenti sono micro-foni, se si opera fuori dall’acqua, idromicro-foni, se si opera in acqua [23].
La propagazione del suono nei fluidi avviene per onde longitudinali [6, pag. 16], ovvero onde in cui la velocità delle particelle (u) e la velocità di propagazione (c) hanno la stessa direzione. Nel caso di onde piane, pressione e velocità di spostamento sono perfettamente in fase (fig. 1.1).
La (1.1) è una legge che presenta una notevole somiglianza con la legge di Ohm ed è pertanto detta Legge di Ohm acustica. Il prodotto ρ⋅c è la resistenza acustica specifica [1, pag. 12] (assimilabile ad una resistenza di un circuito elettrico), la pressione p è assimilabi-le ad un tensione eassimilabi-lettrica e la velocità u è assimilabiassimilabi-le ad una corrente eassimilabi-lettrica.
Per l’acqua di mare: ρ⋅c=1,5⋅105[kg⋅m−2⋅s−1] [5, pag. 2]
Tuttavia, mentre la corrente elettrica implica un flusso di elettroni, la velocità u non in-dica alcun flusso di particelle del mezzo: le molecole del mezzo si mantengono, in media, nella stessa posizione nel corso della loro oscillazione attorno alla posizione di equilibrio, proprio come avviene, ad esempio, in un’onda elastica che si propaga attraverso una molla: non c’è trasporto di materia.
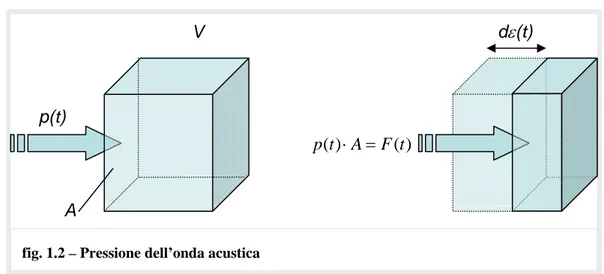
La pressione generata dall’onda acustica compie, secondo la dinamica rappresentata in fig. 1.2, un lavoro elementare [4, pag. 2-10]:
) ( ) ( ) (t F t d t dL = ⋅ ε
Tale lavoro elementare nell’unità di tempo, rappresenta la potenza acustica istantanea secondo la seguente formula:
) ( ) ( ) ( ) ( ) ( ) ( F t u t dt t d t F dt t dL t Pac = = ⋅ = ⋅ ε nella quale si è indicato con
A V p(t) dε(t) ) ( ) (t A F t p ⋅ =
dt t d t
u( )= ε( )
la velocità di spostamento delle particelle di fluido [m/s]. Questa grandezza può essere in-tesa come la risposta del mezzo elastico alla perturbazione causata dalla pressione p(t), prodotta dall’onda elastica.
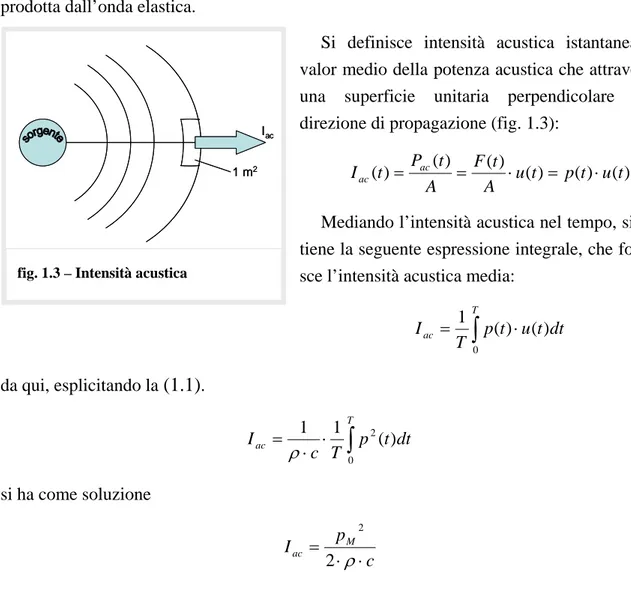
Si definisce intensità acustica istantanea il valor medio della potenza acustica che attraversa una superficie unitaria perpendicolare alla direzione di propagazione (fig. 1.3):
) ( ) ( ) ( ) ( ) ( ) ( u t p t u t A t F A t P t I ac ac = = ⋅ = ⋅
Mediando l’intensità acustica nel tempo, si ot-tiene la seguente espressione integrale, che forni-sce l’intensità acustica media:
∫
⋅ = T ac p t u t dt T I 0 ) ( ) ( 1 da qui, esplicitando la (1.1).∫
⋅ ⋅ = T ac p t dt T c I 0 2 ) ( 1 1 ρ si ha come soluzione c p I M ac ⋅ ⋅ = ρ 2 2avendo indicato con pM il valor massimo della pressione acustica.
Essendo, per onde sinusoidali, il valor massimo legato al valor efficace dalla relazione
2
M eff
p p =
si ottiene la relazione fondamentale dell’elettroacustica
c p Iac eff ⋅ = ρ 2
Ancora una volta si tratta di una relazione che ricorda una legge dell’elettrotecnica, V
P 2
= , consentedo di assimilare l’intensità acustica media alla potenza elettrica.
1 m2
Iac
1 m2
Iac
Per segnali transienti ed in problemi in cui il segnale viene fortemente distorto, anziché parlare di intensità acustica media, si preferisce introdurre il concetto di densità di flusso di energia, integrando l’intensità acustica nel tempo da 0 a infinito (o per la durata del segnale, in casi pratici) [1, pag. 14]:
∫
∞ = 0 ) ( dtt I ELa legge di propagazione dell’energia acustica a par-tire dalla sorgente acustica, in un mezzo omogeneo, isotropo ed illimitato, è sferica, quindi la potenza gene-rata dalla sorgente acustica viene irradiata allo stesso modo in tutte le direzioni, così da essere equamente di-stribuita sulla superficie di sfere concentriche che cir-condano la sorgente, posta al centro (fig. 1.4).
Ipotizzando che il mezzo sia privo di perdite, la potenza acustica P sulla superficie di ciascuna sfera deve essere la stessa:
... 4 4 2 2 2 1 2 1 ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ = ⋅ = A I r I r I Pac ac π π
Quindi l’intensità acustica diminuisce con l’inverso del quadrato della distanza.
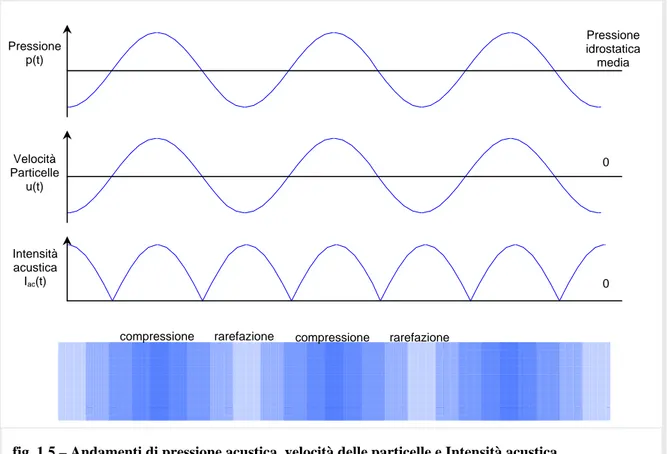
In fig. 1.5 sono rappresentati gli andamenti delle grandezze p(t), u(t) e Iac(t), a confronto
r
2r
1fig. 1.4 – Propagazione sferica
Pressione idrostatica media Pressione p(t) 0 Velocità Particelle u(t) Intensità acustica Iac(t) 0
compressione rarefazione compressione rarefazione
con il moto elastico delle particelle del mezzo. Si tratta di andamenti validi se si considera l’onda acustica come un’onda longitudinale localmente piana. Riguardo al fatto che l’onda sia longitudinale si è già detto, mentre per onda localmente piana si intende un’onda il cui fronte d’onda sia considerato piano, ovvero si tratta di un’approssimazione ideale dell’onda, quando si considera che la sorgente sia posta molto lontano [12, pag. 29].
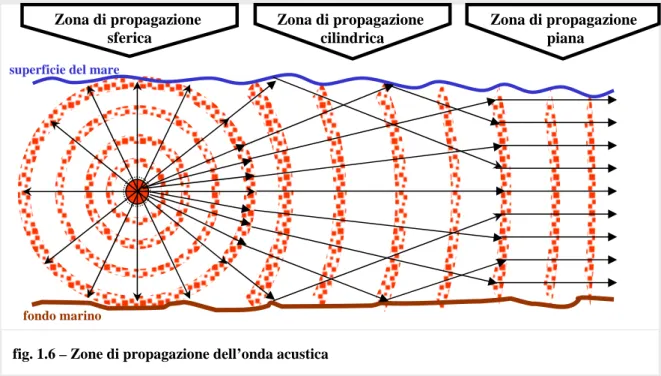
In un mezzo che non sia illimitato, l’onda acustica non si propaga ovunque secondo fronti d’onda sferici. In particolare il mare è delimitato da una superficie e da un fondale. Fra queste due superfici di delimitazione, l’onda acustica si propaga secondo le tre zone di propagazione illustrate in fig. 1.6 [4, pag. 2-7]. Il fronte sferico in presenza delle disconti-nuità del mezzo costituite da superficie e fondale, si trasforma in fronte cilindrico. Tuttavia quando la distanza dalla sorgente, ovvero il raggio di curvatura del fronte è molto elevato, e per regioni che siano una piccola parte della superficie totale, il fronte sferico o cilindrico si può assimilare ad un fronte piano.
La distanza d a partire dalla quale un’onda può essere considerata piana è data dalla re-lazione
λ 2 2 D d = ⋅
in cui D è la dimensione lineare della sorgente [11, pag. 30].
L’attitudine di una sostanza a modificare il proprio volume per effetto di una variazione di pressione è detta comprimibilità. Per i liquidi, il legame tra la variazione di volume dV e la variazione di pressione idrostatica dP è di tipo lineare (nei limiti di elasticità), secondo la relazione [6, pag. 13]: Zona di propagazione sferica Zona di propagazione cilindrica Zona di propagazione piana fondo marino
superficie del mare
E dP V dV − =
dove E è il modulo di comprimibilità del liquido.
Anziché ad una variazione di volume, si può fare riferimento ad una variazione di densi-tà: se m è la massa del liquido, il principio di conservazione della massa impone che quest’ultima non subisca variazioni (dm = 0).
( )
ρV ρdV Vdρ d dm= = + quindi ρ ρ d V dV − = e dunque E dP d = ρ ρUn liquido aumenta pertanto la propria densità all’aumentare della pressione. Il modulo di comprimibilità dei liquidi è di norma piuttosto elevato.
dP d
E ρ
ρ ⋅ = 1
I liquidi sono cioè soggetti a piccole variazioni di volume/densità a fronte di elevate va-riazioni di pressione.
Per l’acqua a pressione e temperatura ambiente: E =2,12⋅109[N⋅m−2].
La velocità di propagazione di un’onda acustica è imposta dalle caratteristiche del mez-zo di propagazione: dipende dalla sua densità ρ e dal suo modulo di comprimibilità E se-condo la seguente relazione [6, pag. 13]:
ρ E
c= (1.2)
Ovvero, mettendo in risalto da dipendenza dalla densità del fluido:
dP d
c ρ
ρ ⋅ = 12
Per questo calcolo esiste una varietà di formule empiriche, una delle quali si riporta di seguito, in dipendenza di profondità h [m], temperatura t [°C] e salinità s [ppm – parti per milione].
Formula empirica di Leroy, valida per un range di temperatura compreso fra -2°C e 24,5°C, un range di salinità da 0,030 ppm a 0,042 ppm e da 0 a 1000 m di profondità2:
61 / ) 35 10 ( ) 18 ( 10 ) 35 10 ( 2 . 1 ) 18 ( 10 4 ) 10 ( 10 6 ) 10 ( 3 9 . 1492 3 2 3 2 2 2 3 h s t s t t t c + − ⋅ ⋅ − ⋅ − − ⋅ ⋅ + + − ⋅ ⋅ − − ⋅ ⋅ − − ⋅ + = − − − (1.3)
Da cui deriva che la velocità del suono in acqua a 0 m di profondità, ad una temperatura di 10 °C e con una salinità di 0,035 ppm è 1.490,3 m/s.
In accordo con la legge (1.2), dalla precedente formula empirica, i gradienti di variazio-ne risultano i seguenti [5, pag. 40]:
all’aumentare della profondità, la velocità del suono aumenta circa di +17 m/s ogni 1000 m;
all’aumentare della temperatura, la velocità del suono aumenta circa di +3,4 m/s per grado Celsius;
all’aumentare della salinità, la velocità del suono aumenta circa di +1,2 m/s ogni 10-3 ppm.
I dati empirici sopra riportati danno una prima idea dell’andamento della velocità del suono in acqua al variare dei parametri pressione, temperatura e salinità, ovvero al variare della densità dell’acqua in relazione a questi parametri. Si può così immaginare il mare come un insieme di strati, in ognuno dei quali i parametri di pressione, temperatura e sali-nità determinano una data velocità del suono.
La propagazione del suono è l’aspetto più studiato dell’acustica subacquea, quello che maggiormente attrae teorici e sperimentatori, a causa della sua complessità.
In questo paragrafo si è parlato di alcuni aspetti che caratterizzano l’onda acustica nell’acqua di mare: si è indagato il meccanismo di formazione dell’onda acustica, i tipi di energie in gioco e questo ha portato alla definizione delle grandezze caratteristiche della propagazione del suono. Si è poi investigato sulla velocità del suono in acqua e sui parame-tri che influenzano tale grandezza.
Questo quadro di insieme consente di affrontare, nel prossimo paragrafo, la propagazio-ne del suono in un ambiente acquatico particolare, il mare.
1.2 La propagazione del suono in mare
I vantaggi dell’utilizzo dell’onda acustica in acqua sono mitigati da limitazioni proprie dell’ambiente marino. Se finora si è discusso della pura propagazione del suono in acqua, si vuole ora collocare quanto detto all’interno dell’ambiente di utilizzo: il mare.
L’ambiente marino si differenzia da un ideale ambiente acquatico per diverse caratteri-stiche:
il mare ha una superficie, una delimitazione superiore, interfaccia fra aria e acqua, soggetta ad agenti atmosferici quali pioggia e vento, che impediscono alla superfi-cie stessa di assumere una forma piatta;
il mare ha un fondale, una delimitazione fra due mezzi, uno dei quali è l’acqua, l’altro può avere una fra varie composizioni (sabbia, fango, roccia), ciascuna con le proprie caratteristiche di propagazione acustica;
il mare è soggetto all’irraggiamento dell’energia solare, il che introduce una varia-bilità della temperatura dell’acqua (in funzione della profondità) con le stagioni e le ore del giorno;
il mare è soggetto a fenomeni di mescolamento delle acquee, quali il moto ondoso, che comportano una redistribuzione della salinità.
La presenza di una superficie e di un fondale marino porta con sé l’esistenza di fenome-ni di riflessione, rifrazione e scattering dei raggi sonori.
Le variazioni di profondità, temperatura e salinità causano variazioni di densità dell’acqua di mare e quindi una variazione della velocità di propagazione dell’onda acusti-ca, in accordo con la (1.3).
Per la descrizione dei fenomeni fin qui citati è necessario introdurre la teoria dei raggi. Si è messo in evidenza come la propagazione dell’onda acustica possa essere valutata secondo variazioni di pressione. Utilizzando tali variazioni di pressione è possibile scrivere un’equazione d’onda che ne rappresenti la propagazione. L’equazione d’onda è la
relazio-ne differenziale che lega la pressiorelazio-ne acustica con le va-riabili tempo e spazio:
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ + ∂ ∂ = ∂ ∂ 2 2 2 2 2 2 2 2 2 z p y p x p c t p
Tale equazione differenziale ammette soluzioni di due tipologie: una secondo la teoria delle onde ed una secondo la teoria dei raggi (fig. 1.7).
La teoria dei raggi acustici, analogamente alla teoria dell’ottica geometrica per i raggi luminosi, prevede la sostituzione dei fronti d’onda sferici con raggi perpendicolari ai fronti d’onda.
Questa teoria è utile per descrivere il comportamento di onde elastiche all’interfaccia fra due mezzi, ovvero i fenomeni di riflessione, rifrazione e scattering [2, pagg. 91 ss].
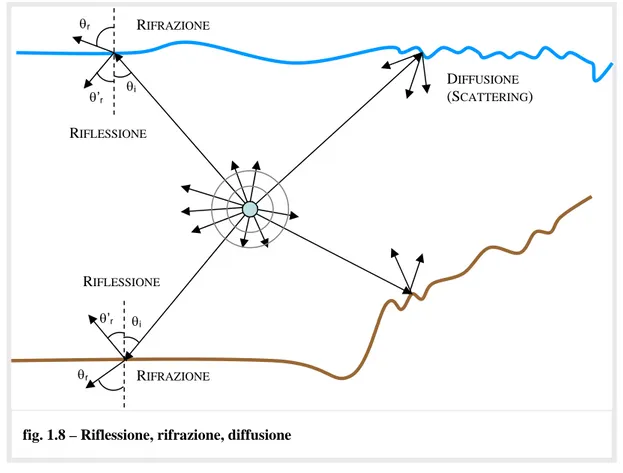
Quando un raggio incide su una superficie di separazione fra due mezzi diversi (come acqua e aria, oppure acqua e roccia) una parte del suono non penetra nel secondo mezzo, ma viene riflesso (se la superficie è liscia, ovvero presenta disomogeneità molto più picco-le della lunghezza d’onda del raggi incidente) o diffuso (se la superficie è scabra, cioè pre-senta disomogeneità superficiali confrontabili con la lunghezza d’onda del raggio inciden-te); una parte del suono, invece, penetra nel secondo mezzo, dando luogo al fenomeno del-la rifrazione (fig. 1.8).
Il raggio diretto, il raggio riflesso e il raggio rifratto, giacciono tutti nello stesso piano. Per quanto riguarda invece il fenomeno della diffusione, l’onda acustica viene reirradia-ta dappertutto anziché in una sola direzione.
Nel fenomeno della riflessione, angolo di incidenza e angolo di riflessione hanno lo stesso valore: θi =θr, mentre la legge che descrive i fenomeni di rifrazione è la legge di
Snell: θi θ’r θi θ’r θr θr RIFLESSIONE RIFLESSIONE RIFRAZIONE RIFRAZIONE DIFFUSIONE (SCATTERING)
1 2 sin
sinθi ⋅c = θr ⋅c (1.4)
dove θr in questo caso è l’angolo di rifrazione, mentre c è la velocità del suono nel mezzo. Quindi per l’interfaccia acqua (mezzo 1)/aria (mezzo 2), in cui c1 <c2, sarà θi <θr.
Nella legge di Snell l’angolo di rifrazione dipende dalla velocità di propagazione del suono nei due mezzi. Come visto nei paragrafi precedenti, non è solo all’interfaccia fra ac-qua e aria o fra acac-qua e roccia che si ha una variazione della velocità del suono. La velocità
del suono in acqua va-ria infatti al vava-riare del-la salinità, deldel-la pro-fondità e della tempera-tura e cresce al crescere della salinità, al cresce-re della profondità e con il diminuire della temperatura.
La conseguenza di questa variazione della velocità di propagazio-ne con le caratteristiche ambientali, è che il raggio acustico non segue una traiettoria retti-linea, ma subisce progressive deviazioni, determinanti un andamento curvilineo del raggio acustico, la cui tendenza è quella di avvicinarsi allo strato in cui la velocità è minore. Infat-ti, dalla (1.4), se c1 <c2 <c3 <c4 <c5 allora
5 4 3 2 1 θ θ θ θ θ < < < < , come rappresentato in fig. 1.9
Si può dimostrare [1, pag. 124] che, in un mezzo in cui la velocità del suono vari linear-mente con la profondità, un raggio acustico descrive una traiettoria circolare.
Bisogna a questo punto aggiungere che, mentre l’andamento della pressione è prevedi-bile (crescita lineare di 1 atm ogni 10 metri di profondità) e l’andamento della salinità è piut-tosto costante per ciascun mare (0,037-0,038 ppm nel Mediterraneo, 0,040 ppm nel Mar Rosso, 0,005-0,029 ppm a seconda della zona
c
1c
2c
3c
4c
5fig. 1.9 – Conseguenze della legge di Snell sull'andamento dei raggi acustici
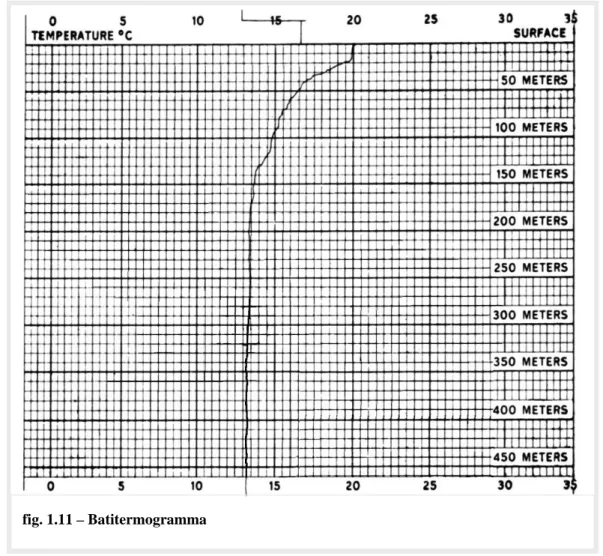
nel Mar Baltico, 0,035 ppm di salinità media negli oceani), la temperatura ha un andamen-to non prevedibile. La temperatura del mare in funzione della profondità viene misurata at-traverso uno strumento che prende il nome di batitermografo a perdere (XBT - Expendable Bathythermograph) e che ha una accuratezza da ±0,25 °C a ±0,1 °C. Si tratta di una sonda che, filata a mare (con un lanciatore del tipo di quello di fig. 1.10) e collegata con un lungo filo ad un registratore, consente di tracciare un grafico della temperatura in funzione della profondità come quello di fig. 1.11.
Da questi batitermogrammi, si ricavano, per punti, attraverso la formula empirica per il calcolo della velocità di propagazione del suono in acqua, i bativelocigrammi (o SSPs, Sound Speed Profiles).
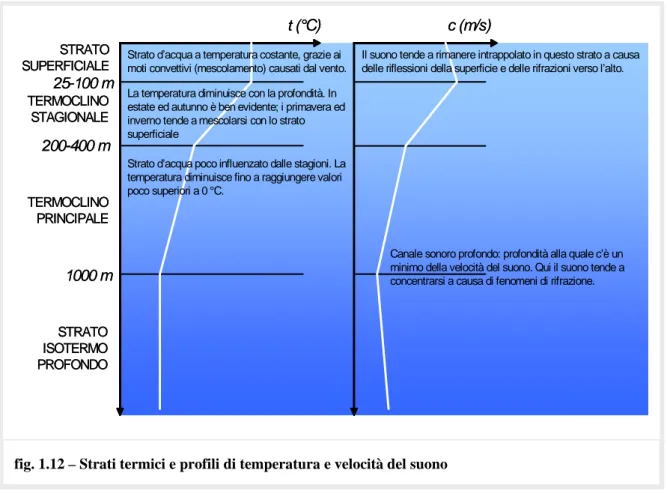
Gli strati d’acqua principali sono riportati in fig. 1.12:
Il Mar Mediterraneo presenta caratteristiche di temperatura peculiari per ciascuna sta-gione dell’anno, che portano ai seguenti andamenti caratteristici della velocità del suono nei primi due strati [4, pag. 6-7]:
BT BV Isotermo Invernale 1500 1510 1520 1530 100 200 300 400 m m/s 1502 12 14 16 18 20 22 24 100 200 300 400 m °C 13,5 25-100 m 200-400 m 1000 m STRATO SUPERFICIALE TERMOCLINO STAGIONALE TERMOCLINO PRINCIPALE STRATO ISOTERMO PROFONDO t (°C) c (m/s)
Strato d’acqua a temperatura costante, grazie ai moti convettivi (mescolamento) causati dal vento. La temperatura diminuisce con la profondità. In estate ed autunno è ben evidente; i primavera ed inverno tende a mescolarsi con lo strato superficiale
Strato d’acqua poco influenzato dalle stagioni. La temperatura diminuisce fino a raggiungere valori poco superiori a 0 °C.
Il suono tende a rimanere intrappolato in questo strato a causa delle riflessioni della superficie e delle rifrazioni verso l’alto.
Canale sonoro profondo: profondità alla quale c’è un minimo della velocità del suono. Qui il suono tende a concentrarsi a causa di fenomeni di rifrazione.
25-100 m 200-400 m 1000 m STRATO SUPERFICIALE TERMOCLINO STAGIONALE TERMOCLINO PRINCIPALE STRATO ISOTERMO PROFONDO t (°C) c (m/s)
Strato d’acqua a temperatura costante, grazie ai moti convettivi (mescolamento) causati dal vento. La temperatura diminuisce con la profondità. In estate ed autunno è ben evidente; i primavera ed inverno tende a mescolarsi con lo strato superficiale
Strato d’acqua poco influenzato dalle stagioni. La temperatura diminuisce fino a raggiungere valori poco superiori a 0 °C.
Il suono tende a rimanere intrappolato in questo strato a causa delle riflessioni della superficie e delle rifrazioni verso l’alto.
Canale sonoro profondo: profondità alla quale c’è un minimo della velocità del suono. Qui il suono tende a concentrarsi a causa di fenomeni di rifrazione.
Negativo Primaverile
Negativo Estivo
Mixed Layer Autunnale
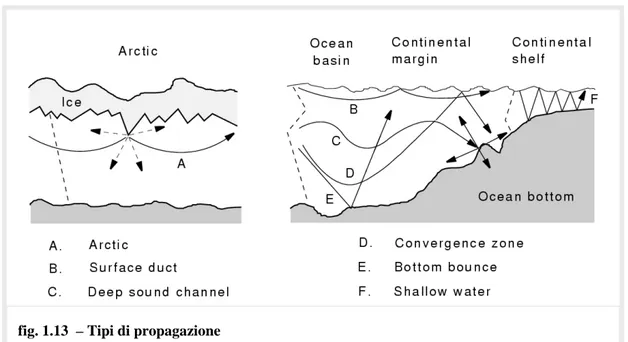
Dalle precedenti figure si possono ricavare tre tipici profili bativelocimetrici. Combi-nando questi profili con le caratteristiche morfologiche della zona di interesse, si deduce che l’energia acustica in mare si propaga in sei modi fondamentali [27], come mostrato in fig. 1.13. 1500 1510 1520 1530 100 200 300 400 m m/s 1504 1514 1513 12 14 16 18 20 22 24 100 200 300 400 m °C 13,5 17 1500 1510 1520 1530 100 200 300 400 m m/s 1504 1532 12 14 16 18 20 22 24 100 200 300 400 m °C 13,5 1500 1510 1520 1530 100 200 300 400 m m/s 1503 12 14 16 18 20 22 24 100 200 300 400 m °C 13,5
La propagazione artica è determinata dalla presenza di ghiaccio e da gradiente BV posi-tivo che porta, nella propagazione dei raggi, ad un eccesso di riflessioni dalla superficie re-sa irregolare per la presenza di ghiaccio. Tale tipo di propagazione caure-sa elevate perdite per dispersione. Non rappresentando un caso di interesse per la presente tesi, non verrà ul-teriormente approfondita.
La propagazione per canale superficiale richiede un aumento della velocità del suono nello strato superficiale (come avviene nel mixed layer autunnale). In tal caso l’energia a-custica emessa da una sorgente nello strato superficiale non si distribuisce uniformemente nello spazio sottomarino, ma viene compressa in una zona relativamente poco profonda. Condizioni di questo genere si determinano a causa di fenomeni di evaporazione superfi-ciale dell’acqua, dovuti a grandi diminuzione di pressione atmosferica, che causano raf-freddamenti delle masse d’acqua superficiali. Si tratta comunque di fenomeni generalmen-te instabili. In Medigeneralmen-terraneo lo spessore dello strato autunnale è di 50/60 m. Nella propaga-zione per canale superficiale, a causa dell’elevato numero di incidenze dei raggi sonori con la superficie, si verificano notevoli perdite per dispersione in aria.
La propagazione per canali sonori richiede l’esistenza di uno strato d’acqua in cui la ve-locità del suono prima decresce con la quota fino ad avere un valore minimo, per poi suc-cessivamente aumentare. A cavallo di questo valore minimo si forma un canale acustico: se si pone una sorgente acustica all’interno di questo canale, l’energia acustica emessa da tale sorgente resta “intrappolata” all’interno del condotto e ciò causa una minore perdita di e-nergia per divergenza, provocando un aumento della distanza alla quale quest’ee-nergia può essere ricevuta. Condizioni stabili di canalizzazione si riscontrano in zone profonde, nelle quali la temperatura, dopo aver raggiunto il valore minimo (13 °C in Mediterraneo) si
bilizza e quindi la velocità del suono aumenta a causa dell’aumento della pressione idrosta-tica.
Nell’andamento bativelocimetrico negativo primaverile si individua una quota alla qua-le la velocità del suono assume lo stesso valore della velocità in superficie. Taqua-le quota prende il nome di quota critica. Se una sorgente è posta alla quota critica, il raggio che è orizzontale a tale quota, diventa orizzontale anche alla quota ove si registra lo stesso valore di velocità del suono, ossia in superficie, in questo caso. I raggi sonori irradiati dalla sor-gente verso l’alto, invece, diventerebbero orizzontali a quote più superficiali, ovvero sopra la superficie. Così essi incidono sulla superficie e poi vengono riflessi. I raggi sonori irra-diati verso il basso illuminano la rimanente parte di mare, realizzando così una propaga-zione acustica su tutto il battente d’acqua. Tale tipo di propagapropaga-zione prende il nome di R.A.P. (Realiable Acoustic Path – Propagazione per raggi acustici affidabili).
Quando il gradiente bativelocimetrico passa da negativo a positivo (andamento negativo primaverile ed estivo) e il fondale è sufficientemente profondo, l’energia acustica irradiata da una sorgente al di sopra della zona critica si propaga per zone di convergenza: il gra-diente negativo incurva i raggi sonori verso il basso, che, man mano che viaggiano verso profondità maggiori, vengono incurvati verso l’alto dal gradiente positivo e risalgono in quota fino ad incidere sulla superficie del mere con un angolo tale da provocare la rifles-sione dell’energia acustica, ripetendo il percorso fino all’esaurimento di tale energia. Si ot-tiene così un aumento della distanza di penetrazione dei raggi, il che consente di individua-re rumori a bassa findividua-requenza prodotti da una sorgente che si trova anche nella 3^ zona di convergenza (80 -120 km). La propagazione acustica per zone di convergenza è la migliore auspicabile.
Qualora invece il fondale non sia sufficientemente profondo, si ha la propagazione in acque basse, che consiste in un caotico alternarsi di riflessioni superficie/fondale. Per con-venzione, i bassi fondali sono quelli fino a 200 m.
Se poi il fondale è posto ad una quota elevata (oltre i 2000 m), ma ha una particolare morfologia riflettente, si ha la propagazione bottom/bounce, propagazione per rimbalzi fondo/superficie. Come nella propagazione per canale superficiale, a causa dell’elevato numero di incidenze dei raggi sonori con il fondale, si verificano notevoli perdite per dispersione. Le caratteristiche morfologiche del Mediterraneo sono poco adatte a questo tipo di propagazione.
Si riportano di seguito degli esempi dei modi di propagazione dei raggi sonori finora esposti [25]:
Propagazione acustica per canale
superficiale o a festoni Propagazione acustica per canale in quota
Propagazione acustica per raggi acustici affidabili
Propagazione acustica per zone di convergenza
Propagazione acustica in acque basse: Propagazione acustica per “Bottom Bounce”:
Finora si è fatto riferimento ad un mezzo privo di perdite, nel quale l’unica ragione di attenuazione dell’energia acustica è una ragione geometrica, relativa alla legge di propaga-zione. In realtà, però, il mezzo di trasmissione non è ideale, è un mezzo assorbente. Causa dell’assorbimento sono reazioni chimiche che avvengono al passaggio dell’onda acustica e che coinvolgono alcuni dei sali disciolti nell’acqua di mare [1, pag. 104]. Queste reazioni chimiche causano la trasformazione di una parte dell’energia acustica in calore, facendo sì che un’onda piana che viaggi in un mezzo assorbente perde una certa porzione della pro-pria intensità in ogni piccola unità di distanza percorsa. La relazione esponenziale
) ( 1 2 1 2 r r n e I I = − −
lega l’intensità I2 alla distanza r2 con l’intensità I1 alla distanza r1 (r2 > r1); n è una costante. Dalla precedente relazione, passando ai logaritmi, si ottiene il coefficiente logaritmico di assorbimento α [dB//km]: 1 2 2 1 10log log 10 r r I I − − = α
che indica la diminuzione di intensità dell’onda acustica per km percorso a causa dell’assorbimento.
Vari studi sono stati condotti con lo scopo di ottenere un modello matematico per il co-efficiente di assorbimento. Le conclusioni sono che i componenti chimici responsabili di questo fenomeno sono molteplici e che il coefficiente α aumenta all’aumentare della fre-quenza (0,06 dB//km @ 1 kHz, 1 dB//km @ 10 kHz) [5, pag. 39] e diminuisce con l’aumentare della profondità (quindi della pressione). È da notare che per frequenze al di sotto del kHz le perdite per assorbimento possono essere trascurate anche per distanze di 100 km, mentre per frequenze sopra i 100 kHz sono proibitive anche a 2 km di distanza.
Il fenomeno dell’assorbimento è determinante nella propagazione dei suoni in mare. La forte dipendenza del coefficiente α dalla frequenza, stabilisce che suoni ad alta frequenza vengono velocemente attenuati, mentre suoni a bassa e bassissima frequenza possono viaggiare per centinaia di kilometri.
Per quantificare l’attenuazione dell’onda acustica a causa del suo propagarsi nel mezzo, viene introdotto il parametro TL (Transmission Loss – Perdite di trasmissione), che tiene conto sia delle perdite di propagazione, sia delle perdite per assorbimento, in funzione del-la distanza r, secondo del-la seguente redel-lazione logaritmica, che fa riferimento per convenzione ad un fondale di 1000 m: ⎨ ⎧ = = − > ⋅ ⋅ + ⋅ + ⋅ = − 1000 r se 1000 '' , 1000 ' dove 10 '' log 10 ' log 20 10 10 3 r r r r r r TL α (1. 5)
in cui α è espresso in dB/km ed r, r’ ed r’’ in m.
La fig. 1.14 mostra l’andamento del parametro TL per funzione della distanza, per di-verse frequenze, confrontando il solo effetto di perdite per propagazione sferica con la somma degli effetti di propagazione sferica ed assorbimento.
TL [dB]
fig. 1.14 – Andamenti di TS in funzione della distanza, pa-rametrizzati con la frequenza [5, pag. 39]
1.3 Background noise in mare
Anche in una apparente “calma piatta”, un elemento vivo come il mare, cela un’enorme quantità di vita, che si mostra sul sensore acustico sotto forma di rumore. Lo stesso mezzo di propagazione è fonte di rumore, un rumore non appartenente a fonti ben identificabili e che è il background noise, il rumore di fondo. Un idrofono posizionato nel bel mezzo dell’oceano fornirà comunque e sempre un segnale di uscita, classificato come rumore, la cui ampiezza presenta delle fluttuazioni casuali che permettono una descrizione solo su ba-se statistica, derivante cioè da osba-servazioni per lunghi periodi.
Traducendo liberamente dal testo di Urick [1, pag. 202], il rumore di fondo, sebbene in modo disomogeneo, non isotropico, avvolge completamente l’idrofono.
Un Towed Array è una lunga antenna ad array lineare, i cui elementi sono gli idrofoni, che viene trascinata (towed) a poppavia di una nave o di un sommergibile. La sua modalità di impiego consente di limitare fortemente la ricezione di rumore prodotto dalla piattafor-ma trainante, per la distanza che separa quest’ultipiattafor-ma dall’array. Tuttavia si tratta pur sem-pre di un corpo rigido che si muove in un fluido e come tale produce delle turbolenze nel fluido, che a loro volta inducono sollecitazioni sul corpo rigido. Lo stesso sensore è causa di rumore, che, sommato al rumore prodotto dall’unità trainante, prende il nome di rumore autoindotto, o self noise.
Il concetto di rumore comprende un numero di processi così grande da fare di esso una componente essenziale dell’acustica subacquea. Strutturalmente è classificato come rumo-re un ampio numero di forme d’onda, ma nella maggioranza dei casi viene considerato un processo casuale. Fissando un istante temporale ed estraendo dal processo di rumore la va-riabile aleatoria corrispondente, si può osservare che il particolare valore di rumore ottenu-to in una prova dell’esperimenottenu-to in quell’istante è determinaottenu-to da un gran numero di con-tributi elementari. Questo giustifica l’applicazione del Teorema del limite centrale, per concludere che il rumore di fondo è con buona approssimazione un processo stocastico Gaussiano, almeno per quanto riguarda le acque mediamente profonde.
Indipendentemente dalla sua natura, il rumore sfrutta tutte le caratteristiche di propaga-zione descritte nel paragrafo precedente, per comporsi infine con il segnale utile, causando una degradazione delle prestazioni del sistema acustico subacqueo.
Il livello di rumore di fondo (NL - Noise Level) costituisce un parametro sonar molto importante e può essere quantificato.
Il rumore di fondo si divide in rumore ambientale e self noise. All’interno di queste due categorie possono essere individuate diverse fonti di rumore, ogniuna delle quali presenta delle proprie caratteristiche temporali, spettrali e spaziali.
1.3.1 Rumore Ambientale
Il rumore ambientale è quella parte di segnale ricevuto da un idrofono che resta dopo aver identificato e sottratto il segnale utile e che non può essere attribuito al funzionamento dell’idrofono stesso.
Le sorgenti di rumore ambientale sono sia naturali che prodotte dall’uomo; esse sono enumerate nella seguente tabella e rappresentate semplicisticamente nella fig. 1.15.
Naturali Prodotte dall’uomo
Attività sismica Traffico navale lontano (da centinaia a mi-gliaia di miglia nautiche dal sensore)
Moto di marea Attività umana lungo le coste
Moto ondoso
Moto delle correnti (che causa turbolenze)
Vento sferzante la superficie del mare
Pioggia
Agitazione termica delle molecole
Rumore biologico
È evidente che tali sorgenti di rumore presentano una forte dipendenza dalla posizione geografica, dalle caratteristiche di propagazione del suono, dalle stagioni, dalle condizioni atmosferiche.
È possibile individuare, nella fig. 1.16, 5 bande frequenziali, ciascuna caratterizzata da una data pendenza3 della curva che rappresenta il livello della densità spettrale di potenza di rumore4 ambientale in acque profonde.
La Banda I (0 ÷ 1 Hz)comprende le frequenze infrasoniche5 fino ad 1 Hz, ovvero tutti quei suoni che producono variazioni di pressione periodiche che completano un ciclo in più di 1 secondo. Sebbene questa porzione dello spettro acustico sia per larga parte ancora sconosciuta (linea tratteggiata), il livello spettrale che la caratterizza è enorme, essendo il rumore in questa banda causato dal moto di marea (frequenza di 2 cicli al giorno), dal moto ondoso (frequenze da 0,05 a 0,5 Hz) e dall’attività sismica della crosta terrestre (con fre-quenza di circa 0,14 Hz).
3
Uno spettro acustico è composto da un ampio numero di frequenze, ognuna con il proprio livello associato. Nella pratica la scala di frequenze viene scomposta in intervalli di ottava o di un terzo di ottava per semplifi-care l’analisi spettrale. La banda di ottava è definita dall’avere il valore della frequenza limite superiore pari esattamente al doppio del valore della frequenza limite inferiore. L’idea di ottava è facilmente intuibile guar-dando la tastiera di un pianoforte. Questa è formata dalla ripetizione di 7 tasti bianchi intervallati da 5 neri: ciascuna ripetizione compone un’ottava e se si ascolta la nota prodotta dallo stesso tasto di ciascuna ripeti-zione, procedendo da sinistra verso destra, si otterranno suoni la cui frequenza è sempre il doppio di quella del suono precedente.
4
Da qui in avanti, per semplicità di linguaggio, si indicherà “livello spettrale” o “andamento spettrale”, in-tendendo “livello della densità spettrale di potenza” o “andamento della densità spettrale di potenza”. 5
Per essere percepita come suono dagli organi uditivi umani in aria, la frequenza della variazione periodica di pressione non deve essere inferiore a 16-20 Hz e superiore a 16-20 kHz. Per questo le frequenze al di sotto di 16-20 Hz prendono il nome di infrasuoni, mentre al di sopra di 16-20 kHz si parla di ultrasuoni. E'
impor-fig. 1.16 – Livello di rumore ambientale in funzione della frequenza [1, pag. 209]
Per dare una giustificazione ad un tale livello spettrale si pensi alle variazioni di pres-sione causate dalle maree. Come verrà detto nel prossimo paragrafo il livello di riferimento dell’intensità acustica è quello di un’onda piana equivalente in grado di causare una varia-zione di pressione di 1 μPa, ovvero 10-6
Pa, cioè circa 10-11 atm. Nel Mediterraneo, ove l’escursione di marea difficilmente supera i 30 cm, questa è in grado di provocare una va-riazione di pressione di 0,03 atm, pari a 3000 Pa. La baia ove sorge l’isolotto roccioso di Mont Saint-Michel, in Normandia, è soggetta a maree con escursioni fino a 14 m… Fortu-natamente questi fenomeni sono ristretti a zone frequenziali molto limitate e, soprattutto, si tratta di porzioni dello spettro molto lontane dalla regione di interesse per l’acustica subac-quea.
La Banda II (1 ÷ 20 Hz) presenta una lieve dipendenza dai venti che sferzano la superfi-cie del mare, ma la causa principale di rumore in questa parte di frequenze infrasoniche è probabilmente la turbolenza oceanica causata dalle correnti. Il livello spettrale di rumore della Banda II può essere calcolato attraverso la seguente formula empirica [23]:
( )
fNLII =17−30log10
[
dB//μPa/ Hz]
in cui f è la frequenza.La Banda III (20 ÷ 500 Hz) è invece una banda di estremo interesse, anche per gli scopi di questa tesi. È un fatto assodato [1, pag. 207] [2, pagg. 281-283] che la sorgente di rumo-re dominante in questa banda sia il traffico navale lontano. Trattandosi di un rumorumo-re gene-rato a notevole distanza dal luogo di misura, è ragionevole supporre che il fenomeno dell’assorbimento non consenta a frequenze più alte di 500 Hz di giungere all’idrofono, e che rumore a frequenze superiori possa essere effettivamente generato dal traffico navale. Questa stessa osservazione giustifica anche l’andamento del livello spettrale di rumore in tale banda: un appiattimento fino a 100 Hz, seguito da una pendenza di -5/-6 dB/ottava. La seguente formula empirica fornisce una stima del livello spettrale di rumore in Banda III
) 2 ( log 20 ) ( log 60 ) 5 , 0 ( 10 30 D 10 f 10 f NLIII = + ⋅ − − − ⋅
[
dB//μPa/ Hz]
D rappresenta la densità di traffico crescente in una scala da 0 a 1.
Nella Banda IV (500 ÷ 50.000 Hz) si trova il rumore generato in superficie, nelle vici-nanze del punto il cui avviene la misura. Si tratta di rumore causato dalle condizioni della superficie del mare, caratterizzate da un determinato stato del mare e dalla forza del vento, il cui livello spettrale può essere stimato usando la formula empirica
( )
[
log( )
1]
log 17 5 , 6 44+ ⋅ − ⋅ 10 ⋅ 10 + = w f f NLIV[
dB//μPa/ Hz]
La Banda V (oltre 50.000 Hz) è dominata dall’agitazione termica delle molecole com-ponenti l’acqua di mare, secondo lo stesso fenomeno che si verifica per l’energia elettro-magnetica e descritto dal Teorema di Nyquist per bipoli lineari passivi isotermi6. Per un i-drofono non direttivo e perfettamente efficiente, il livello di rumore NL causato da questo fenomeno è fornito dalla relazione:
f
NLV =−15+20log
[
dB//μPa/ Hz]
Il livello complessivo di rumore ambientale è quindi stimabile come:
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + + =10log 10 10 10 10 10 10 10 10 V IV III II NL NL NL NL NL
[
dB//μPa/ Hz]
Le precedenti formule empiriche portano alle curve di fig. 1.17, di immediato impiego pratico:
Il rumore biologico, ovvero quello prodotto dagli organismi marini, è da aggiungere a quanto detto, ma non è collocabile nelle suddette bande a causa della sua elevata variabilità nel tempo, in frequenza e nello spazio.
I livelli di rumore ambientale sopra descritti e le formule empiriche citate, sono valide in un generico punto in acque profonde. È chiaro che tipi di propagazione particolarmente favorevoli per la propagazione di segnali utili risultano favorevoli anche per la
6
“La densità spettrale di potenza della tensione di rumore ai capi di un bipolo lineare passivo isotermo di-pende solo dalla parte reale dell’impedenza stessa e dalla temperatura alla quale si trova il dipolo” [13, pag.
ne di rumore. C’è da aspettarsi quindi un aumento del livello di rumore ambientale in un canale superficiale o in un’area di propagazione per zone di convergenza.
Le frequenze di maggiore interesse per l’acustica subacquea si trovano nelle Bande III e IV (20 ÷ 50.000 Hz). Qui, date le cause e la provenienza dal rumore, si riscontra una diret-tività del rumore sul piano ver-ticale, nelle rispettive bande. Il rumore proveniente dal traffico lontano (fino a 500 Hz), pro-prio perché prodotto da una sorgente a grande distanza, ri-sulta significativamente più forte per angoli prossimi all’asse orizzontale, secondo l’andamento qualitativo de-scritto dalla fig. 1.18 [2, pag. 283].
Il rumore generato in una zona della superficie prossima al punto della misura (500 Hz – 50 kHz), dipendente dalle condizioni meteomarine in superficie, e presenta invece una certa direttività per angoli prossimi all’asse verticale.
Quanto appena detto è riassunto dalla fig. 1.19, nella quale è riportata la direttività di tre curve di rumore a tre frequenze differenti. Il rumore a 1414 Hz è riferito a con-dizioni di vento forza 3 (scala Beaufort).
Il rumore in acque basse, baie, porti, è sog-getto infine ad ampie
va-riazioni. Tali zone possono essere molto più silenziose delle acque profonde in condizioni meteorologiche favorevoli e in assenza di attività umana, grazie al fatto che si tratta di luo-ghi naturalmente schermati dal mare aperto. Tuttavia, in condizioni meteorologiche
avver-fig. 1.19 – Direttività del rumore ambientale [1, pag. 230] fig. 1.18 – Direttività del rumore prodotto dal traffico lontano
se od in presenza di attività umana, le zone costiere possono rivelarsi, per la stessa ragione, luoghi in cui il livello di rumore ambientale alle frequenze di interesse è esageratamente elevato.
1.3.2 Rumore Autoindotto per Towed Arrays
Il rumore prodotto da un’unità navale prende il nome di rumore proprio e può essere suddiviso in due categorie:
rumore irradiato: è quello trasmesso in mare da un’unità navale, che rappresenta il segnale utile per la scoperta della stessa attraverso un sistema passivo;
rumore autoindotto: è quello che, via mare o attraverso le strutture dell’unità, viene ricevuto dai propri apparati acustici e rappresenta per essi un disturbo.
Le caratteristiche di utilizzo completamente contrastanti di rumore irradiato e rumore autoindotto nascondono in realtà gli stessi meccanismi di generazione del rumore, e pertan-to le medesime caratteristiche spettrali.
Uno dei vantaggi dell’utilizzo dei towed array è il fatto che si tratta di sensori rimor-chiati a poppa delle navi o dei sommergibili mediante un lungo cavo, allontanando così il sensore passivo dall’ambiente rumoroso rappresentato dall’unità stessa. Tale vantaggio è una caratteristica essenziale, che distingue il towed array da qualsiasi altro tipo di disposi-tivo elettroacustico subacqueo trasportato da un semovente marino.
Le sorgenti di rumore autoindotto sono elencate in fig. 1.20, che ne fornisce una classi-ficazione per i sistemi sonar in generale:
L’incidenza dei diversi tipi di rumore può essere rappresentata in funzione della velocità e della frequenza, come rappresentato nella figura fig. 1.21.
Dalla figura si evince come a bas-sissime velocità l’idrofono è limitato unicamente dal rumore ambiente. Au-mentando la velocità il rumore dei macchinari tende a dominare alle bas-se frequenze, mentre la combinazione del rumore idrodinamico e della cavi-tazione diventa sensibile ad alte frequenze.
Il rumore prodotto dai macchinari ed il rumore prodotto dal fenomeno di cavitazione delle eliche, possono esse-re contrastati in un sistema towed
ar-ray, sia utilizzando opportuni diagrammi di irradiazione dell’antenna, che forniscano una adeguata attenuazione del segnale proveniente dall’unità trainante, sia con un opportuno signal processing, atto ad escludere le bande frequenziali del self noise prodotto dall’unità trainante.
In questo paragrafo si tratterà del solo rumore autoindotto dal sensore stesso, che con-corre, con il rumore ambientale precedentemente descritto, a determinare un certo livello di rumore di fondo, NL.
Il moto relativo fra un oggetto ed il fluido in cui è immerso crea turbolenze, risonanze e vibrazioni di tale fluido. Questi fenomeni generano un rumore che prende il nome di rumo-re idrodinamico [28]. Si tratta di un rumorumo-re di scarsa intensità per velocità basse, ma che cresce fino ad essere predominante alle alte velocità.
Per il sensore towed array il rumore autoindotto (self-noise) dominante è un tipo parti-colare di rumore idrodinamico, causato da fluttuazioni turbolente di pressione dipendenti dalla distribuzione di flusso idrodinamico attorno al sensore, che sono a loro volta funzione della velocità di avanzamento dell’acqua e della forma del sensore. Tale rumore è denomi-nato flow noise.
Il flow noise presenta una dipendenza dalla frequenza, dalla velocità di avanzamento, dalla pressione idrostatica, dalla forma e dalla rugosità del corpo che si muove in acqua.
La fig. 1.22 mostra che, durante il moto relativo fra un fluido ed un corpo solido (rap-presentato dal sensore towed array), si instaura un regime turbolento fra la superficie solida e uno strato di flusso libero (laminar flow). All’interno del regime turbolento si possono
fig. 1.21 – Regioni di dominanza delle sorgenti di rumore autoindotto
individuare un sottostrato laminare (laminar sublayer) ed una zona di turbolenze (turbulent boundary level) più o meno spessa a seconda della velocità di scorrimento. Le fluttuazioni di pressione che si cre-ano nella zona turbo-lenta si trasmettono a-gli idrofoni del towed array. Sebbene queste pressioni turbolente non rappresentino un suono vero e proprio, poiché non si propaga-no a distanza, formapropaga-no quello che è definito uno “pseudo-suono” [1, pag. 360], che si mani-festa sotto forma di rumore fluttuante all’uscita del sensore, il flow noise.
Fa parte del rumore proprio, infine, anche il rumore elettronico dovuto alle componenti elettriche ed elettroniche del sensore towed array. Il rumore elettrico può essere di tipo ter-mico (amplificatori), di quantizzazione (convertitori A/D), dovuto ad interferenze con macchinari dell’unità trainante, a fenomeni di interferenza fra i cavi. Tuttavia tale rumore presenta un livello estremamente basso, se confrontato con gli altri tipi di rumore autoin-dotto.
1.4 Equazione del SONAR passivo
L’acronimo SONAR sta per SOund Navigation And Ranging, in somiglianza con l’equivalente elettromagnetico, il RADAR (RAdio Detection And Ranging). È un sistema SONAR ogni apparato che sfrutti in qualsiasi maniera il suono in acqua.
Un sistema SONAR è attivo, quando ha la funzione di rilevare la presenza di oggetti che si trovano in uno spazio esterno al sistema, utilizzando per questo scopo la riflessione delle onde acustiche trasmesse da un trasduttore, che questi oggetti causano.
Un sistema SONAR è passivo, quando adempie alla medesima funzione, ma senza viare alcun segnale acustico proprio, bensì rimanendo in ascolto di suoni irradiati (non in-tenzionalmente) da semoventi marini, da qui in poi chiamati bersagli, dalla fauna marina o da fenomeni sismici.
Dato un qualsiasi sistema di trasmissione, il problema è trasmettere un segnale e rice-verlo per estrapolarne un’informazione. Nel caso dei sistemi attivi, come il RADAR od il SONAR attivo, è lo stesso apparato (inteso in senso lato, monostatico o bistatico) che tra-smette un segnale ed riceve un’eventuale eco di ritorno. Nel caso del SONAR passivo, così come nelle telecomunicazioni, il sistema attende di ricevere un segnale che qualcun altro ha trasmesso.
In ciascuno dei due casi è necessario fare un bilancio energetico fra trasmettitore e rice-vitore, per capire, assegnata una certa potenza in ricezione, quanta potenza sarà necessario
che sia trasmessa, affinché venga individuato un segnale che possa essere distinto dal rumore.
Lo scopo di un SONAR passvo è quello di individuare (ed i-dentificare, se possibile), eventuali oggetti presenti in acqua, in grado di produrre rumore. Questi oggetti vengono chiamati bersagli, come nel caso RADAR.
Trattandosi di un link budget – letteralmente bilancio (energetico) del collegamento – il modo più intuitivo di dar forma ad una tale equazione è seguire il tragitto del segnale acustico utile dal momento in cui viene generato al momento in cui viene ricevuto.
Quando viene generato, il segnale acustico, che prende il nome di rumore irradiato (ru-more in quanto segnale generato involontariamente dalla sorgente), ha una certa intensità
(Target Source Level – Livello della Sorgente)7. Si tratta di un parametro determinato dal bersaglio e trattandosi di rumore da esso generato involontariamente, non è determinabile a priori.
Tuttavia ci sono in letteratura modelli di livelli spettrali del rumore generato da un se-movente che viene parametrizzato sia in funzione della stazza, della velocità e della tecno-logia del semovente. Viene espresso in μPa / Hz a 1 m di distanza.
Propagandosi dalla sorgente, questo segnale subisce gli effetti di attenuazione discussi nel paragrafo 1.2, dovuti in parte al mezzo di propagazione e in parte al semplice fatto che l’onda si propaga. Il parametro che quantifica questo fenomeno è TL (Trasmissione Loss – Perdite di Propagazione).
Giunto al ricevitore, il segnale utile, oltre che attenuato, risulta immerso in un certo li-vello di rumore quantificato dal parametro NL (Noise Level – Lili-vello di Rumore), e com-posto da rumore ambientale (determinato dal mezzo) e da rumore proprio del sensore rice-vente (determinato dall’apparato), come illustrato nel paragrafo 1.3.
L’antenna idrofonica ricevente, da parte sua, non riceverà tutta la densità di potenza a-custica per unità di superficie che giunge nel punto in cui essa è collocata, ma intercetterà solo una parte di potenza, dal momento che si tratta di un’antenna direttiva. In questo mo-do si può ottenere un rapporto segnale rumore al ricevitore più favorevole, dal momento che il segnale proviene da una direzione ben precisa, mentre il rumore proviene in generale da tutte le direzioni. Ipotizzando che il fascio d’antenna punti nella direzione di provenien-za del segnale – come è logico che sia – ne deriva una attenuazione della potenprovenien-za di rumo-re ricevuta. Il parametro che tiene conto di questo effetto, determinato dall’apparato, è DI (Receiving Directivity Index – Indice di Direttività al ricevitore).
Infine, oltre all’idrofono, all’interno della catena ricevente, ci sono una serie di compo-nenti, ognuno con le proprie caratteristiche, fino ad arrivare al decisore. L’insieme dei pa-rametri propri di tali componenti viene riassunto dalla quantità DT (Detection Threshold – Soglia di Scoperta), che indica il minimo valore di rapporto segnale rumore rilevabile dal sonar con una determinata probabilità di errore.
Affinché avvenga la scoperta, dovrà quindi risultare: ≥ − −
−TL) (NL DI) DT
(SL (1.6)
Per semplicità d’uso e per convenzione, le quantità che compongono l’equazione del SONAR vengono espresse in dB
7
Il parametro SL assume un significato profondamente diverso nei due casi SONAR attivo e SONAR passi-vo. In un apparato SONAR attivo, infatti il livello della sorgente è relativo all’impulso generato dallo stesso
1 2 10 W W Log dB= ⋅
ovvero per mezzo di una misura relativa di una quantità rispetto ad un’altra, quindi un nu-mero puro (N dB), oppure può essere interpretata come misura assoluta, qualora la quantità W1 sia un livello di riferimento. In questo secondo caso dovrà essere indicato il livello di riferimento, N dB//W1.
Il livello di pressione di riferimento nel campo dell’elettroacustica subacquea 1 μPa. In questi termini, con livello di un’onda acustica, si intende il numero di dB di cui la sue in-tensità, o densità di flusso di energia, differisce dal livello di riferimento.
La (1.6) porta a scrivere l’equazione d SONAR passivo come: =
− −
−TL) (NL DI) DT
(SL (1.7)
Una tale scrittura evidenzia la natura della soglia di scoperta DT, espressa in termini di rapporto segnale rumore. I termini sono raggruppati fra parentesi tonde per indicare i ter-mini relativi al livello di segnale utile (SL-TL) e i terter-mini relativi al livello di rumore (NL-DI).
A un tale tipo di scrittura si può prediligere una forma dell’equazione del SONAR pas-sivo che mostri chiaramente la separazione fra i parametri che dipendono dal SONAR (DT e DI) ed i parametri da questo indipendenti:
DI DT NL TL)
(SL− − = − (1.8)
Questa scrittura dell’equazione del SONAR consente un chiaro confronto di bontà fra vari tipi di SONAR passivi, così da poter stabilire un livello di bontà dell’apparato SO-NAR passivo nel suo complesso. Attualmente, apparati SOSO-NAR passivi, del tipo Towed Array molto buoni sono in grado di scoprire un bersaglio quando
dB NL
TL)
(SL− − =−31 (1.9)
In questa sede si specifica che un sensore Towed Array è caratterizzato, per sua natura, da una direttività molto elevata (come verrà illustrato nel capitolo 2), peculiarità, questa, che consente un notevole miglioramento delle prestazioni rispetto ad altri apparati SONAR passivi.
Ciò premesso, si riporta di seguito la tabella dei parametri SONAR [1, pag. 22]
Parametro Riferimento Definizione
SL Source
Level
1 m dalla sor-gente, sul suo
asse acustico intensitàacusticadiriferimento sorgente della m 1 ad acustica intensità log 10⋅ 10 TL Transmis-sion Loss 1 m dalla sor-gente e al ricevitore ricevitore al segnale del acustica intensità sorgente dalla m 1 a segnale del acustica intensità log 10⋅ 10
NL Noise Level Nei pressi del
sensore intensitàdiriferimento
idrofono dell' pressi nei rumore di intensità log 10⋅ 10 DI Directivity Index Ai capi del sensore reale idrofono dell' capi ai rumore di potenza onale omnidirezi e equivalent idrofono un di capi ai rumore di potenza log 10⋅ 10 DT Detection Threshold Ai capi del
sensore potenzadidisturboaicapidelsensore sensore del capi ai segnale di potenza log 10⋅ 10 SL – Source Level
Come descritto nel paragrafo 1.3, ogni semovente marino è sorgente di rumore irradiato. L’intensità di tale rumore
è strettamente dipendente dalla frequenza di ascolto e rappresenta il livello di segnale utile.
In fig. 1.24 è rappre-sentato il tipico andamen-to spettrale del rumore ir-radiato da un’unità nava-le:
Il rumore di macchina è il rumore generato dalle vibrazioni di macchine di propulsione e di macchine
ausiliarie, come quelle per la produzione di energia elettrica o per il condizionamento. Le vibrazioni poi vengono trasmesse in mare attraverso lo scafo. I rumori dei macchinari han-no tre tipi di andamenti spettrali, illustrati in fig. 1.25:
fig. 1.24 – Aspetto del rumore irradiato da una piattaforma nava-le nel dominio della frequenza
rumori a frequenza fissa: producono una serie di righe spettrali alla frequenza corri-spondente a quella dei mac-chinari rotanti ed alternativi, che normalmente girano a ve-locità costante, pertanto que-sto genere di rumore risulta
indipendente dalla velocità della piattaforma;
rumori a frequenza fissa indipendente dalla velocità dei rotazioni dei macchinari: producono anch’essi una serie di righe spettrali, ma sono prodotti dalle vibrazioni di parti dei macchinari o del loro basamento;
rumori casuali a banda larga: producono uno spettro continuo a larga banda, sono causati da assi, giunti, cuscinetti.
Il rumore di cavitazione è il rumore generato dal fenomeno della cavitazione, caratteri-stico dei liquidi contenenti gas disciolti, in cui vengono causate brusche depressioni. Quando si crea una brusca depressione nel liquido, le microscopiche bollicine di gas di-sciolto aumentano di volume secondo la legge di Boyle8. Queste bolle possono pulsare in zone a pressione diversa come quelle generate dall’elica di propulsione, producendo così un’onda di pressione acustica, oppure possono continuare ad espandersi fino a causare mi-gliaia di microesplosioni secondo cicli della durata di pochi millisecondi, od ancora posso-no implodere se la si-tuazione di pressione si inverte. Questo tipo di rumore è funzione della pressione idrostatica e della velocità della piat-taforma. La figura fig. 1.26 rappresenta l’andamento spettrale della cavitazione, rumo-re che fornisce il contri-buto maggiore nella banda da 1 a 20 kHz.
8
È lo stesso fenomeno che si può osservare togliendo il tappo ad una bibita gassata: il gas era disciolto nel fig. 1.25 – Tipologie di spettro del rumore prodotto dai macchinari
Come detto, esistono in letteratura modelli di livelli spettrali del rumore generato da un semovente che viene parametrizzato sia in funzione della stazza, della velocità e della tec-nologia del semovente. Si tratta di modelli parametrici (parametro Tgt da 0 a 4), che con-sentono di ottenere sia il rumore irradiato in banda larga, sia un probabile inviluppo delle righe spettrali irradiate a banda stretta, per vari tipi di bersagli, dal sommergibile silenzio-sissimo che procede a bassa velocità (Tgt 0), alla più rumorosa nave mercantile (4). Il tipo modello ad un solo parametro, consente di trattare l’argomento senza ricercare un’elevata accuratezza, quindi di rispettare la sua riservatezza.
L’equazione (1.10) genera un modello di densità spettrale di potenza di SL in banda lar-ga, espressa in dB//μPa / Hz @ 1 m, secondo il parametro Tgt che varia da 0 a 4, e alla frequenza in Hz. Il modello vale da 10 a 10.000 Hz [7].
Parametro Tgt Tipo di bersaglio 0 Sommergibile silenziosissimo
1 Sommergibile silenzioso
2 Sommergibile rumoroso
Nave militare silenziosa
3 Nave militare media
Mercantile medio
4 Nave militare rumorosa
Mercantile pesante
(
)
[
]
(
)
(
)
[
]
{
}
4 4 3 10 3 . 0 2 10 3 . 0 10 3 . 0 15 . 1 1 60 300 / 5 . 1 1 4 / 60 300 / 22 60 60 log 4 5 . 4 5 . 2 60 60 log 4 15 16 60 60 log 4 5 . 8 5 . 2 4 66 87 − ⋅ − ⋅ + ⋅ ⋅ − ⋅ + + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ + ⋅ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ ⋅ − + + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ + ⋅ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ ⋅ − + + ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ + ⋅ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ ⋅ − + ⎥⎦ ⎤ ⎢⎣ ⎡ ⋅ + = Tgt f Tgt Tgt f Tgt f Tgt Tgt f Tgt Tgt f Tgt Tgt SL (1.10)Le curve di inviluppo del livello indice delle righe, pur comportando lo stesso parame-tro Tgt, non presentano una correlazione così precisa con il tipo di bersaglio e sono deter-minate da 4 modelli, BLADE, FIRING, PLANT ed AUX, come indicato nella tabella se-guente. Il modello AUX è totalmente identico al modello PLANT.
Le equazioni (1.11), (1.2) ed (1.3) generano i modelli degli inviluppi del livello indice di radiazione SL delle righe espresso in dB//μPa / Hz @ 1 m, secondo il parametro Tgt che varia da 0 a 4, e della frequenza in Hz. I modelli valgono da 2 a 2000 Hz.
Il livello indice complessivo di una sorgente si costruisce dalla sommatoria pesata dei modelli elementari (in valori naturali).
Tgt BLADE
(elica)
FIRING (scoppi del diesel)
PLANT (impianto propul-sivo) AUX (macchinari ausiliari) 0 Elica lentissima a sciabola o a mentel-lo
Diesel rapido accu-ratamente silenzia-to Motore elettrico e/o turbogenerato-re silenziosissimi Reattore a cir-colazione naturale 1 Elica lenta a
sciabo-la Turbine o ridutto-ri silenziosi Ausiliari si-lenziosi 2 Diesel rapido 3
4 Elica a forte modu-lazione di pressione
Diesel lento rumo-rosissimo Turbine o ridutto-ri rumorosissimi Ausiliari ru-morosissimi BLADE ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ − ⋅ + = 10 1 log 20 20 105 10 f Tgt SL (1.11) FIRING ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⋅ + ⋅ − + ⋅ + = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ − ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⋅ Tgt f Tgt e f Tgt Tgt SL 5 . 47 200 log 4 2 3 2 10 10 5 . 47 200 1 log 20 15 120 (1.12) PLANT ed AUX ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ + ⋅ − ⋅ + = ⎥⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⋅ 200 log 4 2 4 1 10 10 1 log 80 15 110 f Tgt e Tgt SL (1.13)
TL – Transmission Loss
Delle perdite per propagazione in mare si è trattato alla fine del paragrafo 1.3. In questa sede si ricorda l’espressione finale riferita ad un fondale di 1000 m.
⎩ ⎨ ⎧ ≤ = = > − = = ⋅ ⋅ + ⋅ + ⋅ = − 1000 r se 0 '' , 1000 r se 1000 '' , 1000 ' dove 10 '' log 10 ' log 20 10 10 3 r r r' r r r r r r TL α NL – Noise Level
A meno che non si posseggano precisi dati relativi a misurazioni di rumore ambientale del particolare luogo, nei casi partici si utilizza il grafico riportato in fig. 1.17, tenuto conto del livello di traffico lontano e della forza del vento.
Per quanto riguarda il rumore proprio, questo può essere stimato da apposite tabelle, proprie della specifica coppia sensore/unità trainante, risultato di opportune misurazioni.
fig. 1.27 - Curve di inviluppo del livello indice in larga banda (sinistra) e del livello indice delle righe (destra)
Gli effetti del rumore proprio e del rumore ambientale possono combinarsi, ma è più frequente che uno dei due prevalga sull’altro, imponendo le sue caratteristiche.
DI – Directivity Index
L’ascolto settoriale si ottiene con la formazione dei lobi di direttività; di questo tratta-mento si tiene conto nell’equazione del SONAR attraverso il parametro DI, che non è fun-zione degli angoli (θ, ϕ) in quanto indica la direttività massima.
reale idrofono dell' capi ai rumore di potenza e equivalent onale omnidirezi idrofonon un di capi ai rumore di potenza log 10⋅ 10 = DI
Per antenne semplici, come nel caso di array lineari, l’indice di direttività è fornito da semplici espressioni matematiche. Per un towed array di lunghezza L (con L >> λ), forma-to da N sensori equispaziati, la direttività massima coincide con il numero di elementi9 ed è indipendente dalla direzione di puntamento. In notazione logaritmica:
( )
N DI =10log10 Indicando con d lo “spacing” fra i singoli elementi(
N)
dL= −1 ⋅
Per ottenere il massimo possibile valore di direttività dovrà poi essere
2 λ = d quindi ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ = λ L DI 10log10 2
Nel caso dell’equazione del SONAR la direttività è un parametro che accresce le presta-zione del sensore, in quanto un’antenna direttiva consente di intercettare solo una frapresta-zione del rumore ambientale quando questo è distribuito uniformemente sull’orizzonte 3D. Nella definizione del parametro DI si è tacitamente assunto che il rumore di fondo sia isotropico, per questo ha senso infatti riferire il livello di segnale ricevuto dall’antenna reale al livello di segnale ricevuto da un’antenna omnidirezionale. Come dimostrato nel paragrafo 1.3, il rumore di fondo non è in generale isotropico. Ciò causa una degradazione delle prestazioni
9
La direttività massima indicata è relativa solo a quello che viene chiamato fattore di array. Si tratta di una quantità scalare, definita dalle proprietà geometriche dell’array, indipendentemente dai particolari sensori che lo compongono, che pertanto vengono considerati elementi riceventi isotropici. Per ottenere la direttività del-la specifica antenna bisogna moltiplicare il fattore di array per il fattore di elemento, una quantità vettoriale