Cap. 6 Risultati
In questo capitolo saranno esposti i risultati sperimentali ottenuti per le varie configurazioni di attuatori utilizzati. I dati ottenuti consentono di avere una visione globale delle caratteristiche di attuazione per le varie configurazioni; ciò ha gettato le basi per la realizzazione di ulteriori sperimentazioni volte a migliorare il dispositivo, descritte negli ultimi paragrafi. I risultati relativi alle deformazioni raggiunte verranno forniti con l’ausilio di grafici che riportano le diverse curve sperimentali. Verrà fatto riferimento ai dettagli tecnici del dispositivo ad emisfere non conduttrici che è stato utilizzato, descritto in maniera dettagliata nel capitolo precedente. A tal proposito si suggerisce di fare riferimento alla tabella 5.1, nella quale sono riassunte le grandezze che caratterizzano i supporti emisferici della base, per interpretare in modo chiaro le informazioni contenute nei grafici. Sugli attuatori che rispondono in modo più affine, ossia con grandi deformazioni, alle esigenze di una modulazione di forma, sono state eseguite delle misurazioni della forza sviluppata, utili al fine applicativo.
6.1 Analisi delle deformazioni
Facendo riferimento ai Doe realizzati precedentemente, sono state eseguite due sessioni di prove su un ampio numero di attuatori, al variare della grandezza degli elettrodi (sempre con lo stesso diametro del vincolo) e dei supporti emisferici sui quali le membrane, di volta in volta, si appoggiavano. In tal modo è stato possibile trovare sperimentalmente un rapporto ottimale tra il diametro dell’elettrodo e le dimensioni dell’emisfera.
I film siliconici utilizzati, come detto più volte, erano costituiti dal 40% di plastificante nella loro composizione e sono stati fabbricati in un breve lasso di tempo in modo da ridurre le variazioni relative al materiale utilizzato.
I dati sono stati ottenuti attivando ciascun attuatore per un tempo sufficiente, a intervalli di potenziale applicato sufficientemente vicini (0,5kV).
Nei grafici rappresentati nelle figure seguenti sono visibili gli andamenti della deformazione in funzione del campo elettrico per attuatori con dimensione di elettrodo e vincolo pari a 30mm (E30/V30), 40mm (E40/V40) per i supporti emisferici S1
pari a 55mm (E55/V55) per il supporto emisferico S6 (h=3,22mm). Sono stati scartati, fra i 6 supporti del dispositivo, quelli che non presentavano apprezzabili variazioni rispetto a quelli presi in considerazione. In questo modo è stato possibile definire in modo più accurato quali fossero i parametri e le dimensioni ottimali per ottenere un’attuazione migliore.
I grafici sotto riportati rappresentano le deformazioni ottenute per attuatori diversi su alcuni supporti emisferici. Come si può notare, per attuatori E30/V30 e E40/V40, i dati sperimentali ottenuti ricalcano in maniera molto precisa la curva teorica, per la quale si ha un andamento dipendente dal quadrato del campo elettrico.
E30/V30 0 20 40 60 80 100 120 140 160 0 5 10 15 20 E(V/micron) de f% S1S3 S4 E40/V40 0 20 40 60 80 100 120 140 160 0 2 4 6 8 10 12 14 E(V/micron) de f% S1 S3 S4
E’ possibile vedere chiaramente, inoltre, gli andamenti dei dati per una particolare misura di elettrodo sui tre principali supporti emisferici. Si può notare, in questo modo, che per supporti emisferici di altezza ridotta, le deformazioni ottenute siano più vantaggiose.
Per quanto riguarda gli attuatori E55/V55, la risposta al campo elettrico, sebbene molto pronunciata per alti campi, ha un andamento molto discontinuo della deformazione. Una corretta estroflessione si ha, infatti, solo per valori di campo elettrico intorno a 12V/ m mentre, per valori più bassi, le deformazioni sono nettamente inferiori a causa delle forze di attrito tra polimero e base che sono particolarmente forti essendo molto più ampia la superficie di contatto rispetto agli attuatori precedenti.
E55/V55 0 20 40 60 80 100 120 140 160 180 0 2 4 6 8 10 12 14 E(V/micron) de f% S6
Nelle figure seguenti è possibile analizzare le estroflessioni ottenute.
Grafico 6.2: Andamento della deformazione percentuale in funzione del campo elettrico applicato per l’attuatore E55/V55 sul supporto emisferico S6. Si nota che, per bassi valori di campo elettrico, la deformazione è ridotta a causa dell’eccessivo attrito
In particolare si può notare quanto sia pronunciata l’estroflessione nella seconda attuazione, a potenziali sufficientemente alti (12V/ m) tali da far staccare completamente la membrana dalla base. In questo caso si raggiungono deformazioni che raggiungono il 200%.
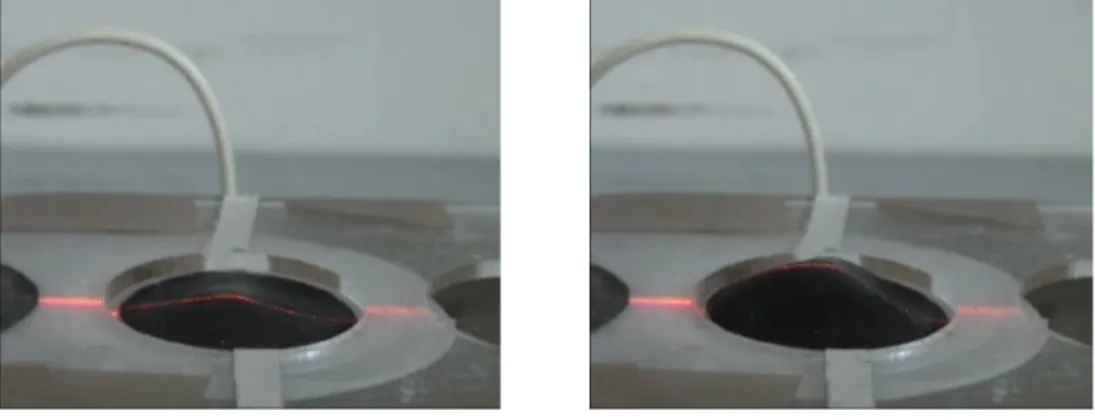
La figura 6.1 è invece relativa ad un’estroflessione del 140% sullo stesso supporto emisferico, in risposta ad un campo elettrico applicato di 14V/ m, che risulta molto più omogenea e simmetrica, ma soprattutto più regolare rispetto al caso E55/V55.
Deformazioni di alta intensità (fino al 160% nel caso di seguito riportato) sono state
Fig. 6.1: Attuatore E40/V40 sul supporto emisferico S6 (altezza 3,22mm) a riposo (a sinistra) e in fase attiva (a destra)
Fig. 6.2: Attuatore E55/V55 sul supporto emisferico S6 (altezza 3,22mm) a riposo (a sinistra) e in fase attiva (a destra)
Osservando i filmati delle prove di attuazione effettuate, si nota che, in genere, utilizzando supporti emisferici di più grande altezza, la deformazione è più omogenea e regolare all’aumentare del campo elettrico applicato, ma ridotta in intensità. E’ intuitivo pensare che debba essere ricercata una configurazione che privilegi la dimensione del diametro, con un’altezza della calotta ridotta, ottenibile attraverso l’utilizzo di un supporto sferico a grande raggio.
Dai grafici seguenti si può osservare, invece, come, a parità di supporto emisferico, i comportamenti degli attuatori E30/V30 e E40/V40 siano diversi.
Confronto su S1(h=5.15mm) 0 10 20 30 40 50 60 70 0 5 10 15 20 E(V/micron) de f% E30/V30 E40/V40
Fig. 6.3: Attuatore E40/V40 sul supporto emisferico S4 (altezza 3,10mm) a riposo (a sinistra) e in fase attiva (a destra)
Grafico 6.3: Andamento della deformazione percentuale in funzione del campo elettrico applicato per attuatori E30/E30 e E40/E40 sul supporto emisferico S1
Confronto su S3(h=4.00mm) 0 20 40 60 80 100 120 140 0 5 10 15 20 E(V/micron) de f% E40/V40 E30/V30 Confronto su S4(h=3.10mm) 0 20 40 60 80 100 120 140 160 180 0 5 10 15 20 E(V/micron) de f% E30/V30 E40/V40
6.2 Misure di forza
Parallelamente all’analisi dell’estroflessione eseguita per i vari attuatori, si è reso necessario caratterizzare i dispositivi ideati anche dal punto di vista della forza che sono
Grafico 6.4: Andamento della deformazione percentuale in funzione del campo elettrico applicato per attuatori E30/E30 e E40/E40 sul supporto emisferico S3 (in alto) e S4 (in basso)
Per realizzare delle misure di forza è stato utilizzato un trasduttore isometrico, collegato ad un computer, ed un programma apposito in grado di calcolare istante per istante, a intervalli regolari, la forza esercitata dall’attuatore. E’ stato utilizzato, come mezzo interposto fra l’attuatore e il trasduttore, un supporto sferoidale in plastica, adatto allo scopo. Tale supporto ha consentito uno sfruttamento di un’area sufficiente dell’attuatore in grado di sviluppare forze fino a 32-33mN in risposta ad un campo elettrico applicato di 12V/ m. Questo incremento di area è necessario per trasferire l’attuazione al sensore puntiforme del trasduttore, che altrimenti penetrerebbe la membrana siliconica alterando la misurazione. Sono stati prelevati, in questo modo, valori di forza per potenziali applicati crescenti, che sono stati riportati in un foglio Excel per graficare la curva della forza sviluppata in funzione del campo elettrico. Tale andamento rispecchia in modo apprezzabile la curva teorica caratteristica, come è visibile nel grafico seguente per un attuatore E30/V30 attivato sul supporto emisferico S5 (altezza 3,14mm).
E30/V30 supporto S5 (h=3,14) 0 5 10 15 20 25 30 35 0 5 10 15 E(V/micron) F( m N ) Serie1
Tali misure sono state considerate immediatamente molto soddisfacenti, in attesa di ulteriori conferme derivate dalle nuove configurazioni proposte.
Grafico 6.5: Andamento della forza in funzione del campo elettrico applicato per un attuatore E30/E30 sul supporto emisferico S5
6.3 Una nuova configurazione del supporto emisferico
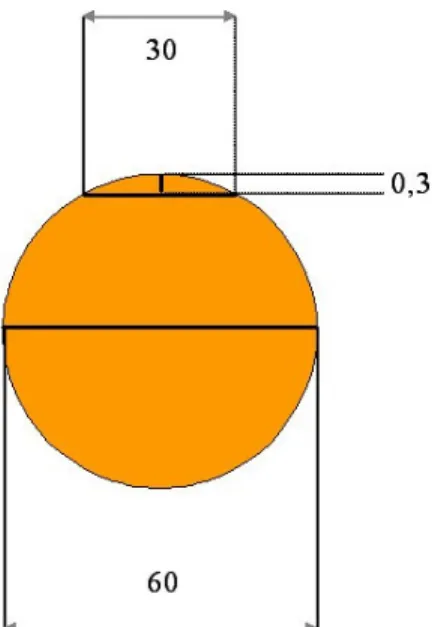
Come è stato possibile notare osservando i filmati delle prove di attuazione effettuate, utilizzando supporti emisferici di più grande altezza, si ottengono estroflessioni più omogenee e regolari all’aumentare del campo elettrico applicato, nonostante ci sia una sensibile riduzione di intensità della deformazione. E’ intuitivo quindi andare a sviluppare l’attuatore in una nuova configurazione che privilegi la dimensione del diametro del supporto emisferico, mantenendo ridotta l’altezza. Tale configurazione è ottenibile attraverso l’utilizzo di un supporto sferico a grande raggio. E’ stato stabilito che, per questa serie di esperimenti, dovesse essere rispettata l’altezza dell’emisfera di 3mm che, nelle esperienze precedenti, ha fornito migliori risultati. Per quanto riguarda ildiametro abbiamo pensato di analizzare l’attuazione nel caso di diametro dell’emisfera molto vicino a quello dell’elettrodo e del vincolo, ossia 30mm. Da considerazioni geometriche è stato ricavato che, per ricavare un supporto emisferico alto 3mm, con diametro 30mm, dovesse essere utilizzata una sfera di diametro di circa 60mm.
Le emisfere adatte sono state fabbricate con lo stesso procedimento descritto nel capitolo 4 utilizzato per i 6 supporti del dispositivo precedentemente messo a punto, cioè per compressione di uno stampo di materiale plastico di forma e diametro opportuni in una matrice di plastilina, fino ad una certa altezza e
successivo riempimento con resina. Tali emisfere sono denominate S30.
Utilizzando il nuovo supporto, sono state realizzate prove di estroflessione su membrane con il 40% di plastificante, di spessore 0,5mm e 1mm, per determinare se ci potessero essere miglioramenti rispetto alle configurazioni precedenti, in modo da fornire un apporto importante per la realizzazione del dispositivo per la modulazione di una superficie flessibile, dimostrato nel prossimo capitolo.
Fig. 6.4: Dimensioni della sfera per lo stampo per ottenere un supporto emisferico adatto di 3mm di altezza e 30mm di diametro
“fori per l’aria”, la cui funzione sarà descritta precisamente nel capitolo 8 in relazione agli sviluppi futuri.
I problemi più rilevanti sono stati di ordine pratico nella realizzazione di un’emisfera che, da un altezza di 3mm al centro, si riducesse a zero in prossimità del vincolo.
Per tale motivo, questo nuovo tipo di configurazione resta ancora pienamente valido, in attesa di miglioramenti strutturali.