Capitolo 1
Descrizione del sistema e studio completo della
problematica
Scopo principale di questo capitolo è presentare il risultato di un primo studio di fattibilità per il problema in esame.
Studio di fattibilità teso a:
- definire le caratteristiche generali del sistema da controllare,
- presentare gli approcci e le soluzioni al problema che sono stati adottati in letteratura, - definire una linea generale di sviluppo.
1.1- Il fenomeno fisico
Con il termine combustione si designa un articolato processo chimico che, a partire da due gruppi di sostanze, denominate rispettivamente combustibile e ossidante , attraverso più reazioni chimiche consecutive, perviene ad un prodotto finale, rilasciando calore.
Affinché tale reazione chimica avvenga è necessario che i due composti vengano in contatto fra loro
A seconda della fase in cui i composti si trovano, le modalità di attivazione e di svolgimento della reazione di combustione saranno diverse. Si possono presentare così i seguenti casi:
- il combustibile è in fase liquida (in genere si hanno miscele di idrocarburi allo stato liquido)
- il combustibile è in fase solida - il combustibile è in fase gassosa
Poiché le molecole del combustibile e dell’ossidante vengono in contatto fra loro più velocemente in fase gas, la maggior parte dei processi di combustione avviene in questa fase ed in modo omogeneo.
Per lo sviluppo del modello d’interesse, si dovrà prestare particolare attenzione proprio a quest’ultimo caso, ma per una comprensione di base dell’ intero processo di combustione in appendice B, si definiscono brevemente i concetti fondamentali legati a tutti e tre i casi sopra riportati.
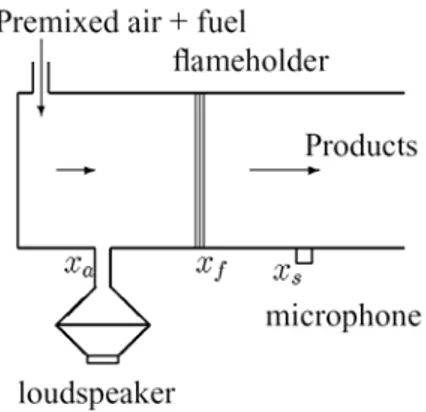
Una schematizzazione della camera di combustione utile a definire la problematica può essere così effettuata:
Figura 1-1: Schema di una camera di combustione pre-miscelata
L’aria ad alta pressione proveniente dal compressore passa dentro il condotto di ingresso (Inlet Duct), mentre il combustibile viene fatto passare nel condotto di adduzione combustibile (Fuel Supply line).
Il combustibile viene poi ignettato nel flusso d’aria mediante appositi ignettori dando inizio al processo di miscelazione che poi si compie in modo definitivo nella sezione di miscelazione (Mixing Section)
La sezione di miscelazione può essere realizzata in diversi modi, uno schema comune è riportato nella seguente figura:
Figura 1-2 Schema della sezione di miscelazione
Una volta miscelati vengono ignettati in camera dove ha luogo il processo di combustione. I gas combusti escono dalla camera e fluiscono verso la turbina mediante i condotti di uscita (Exhaust Nozzles)
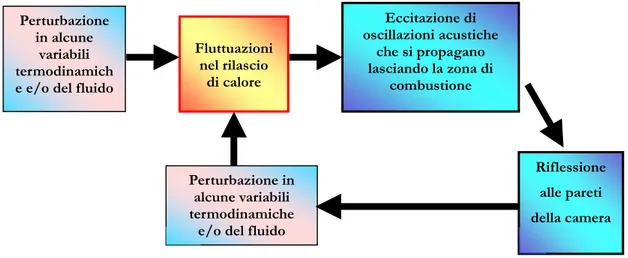
In genere, il processo di combustione che avviene in camera di combustione, è un processo che coinvolge la seguente dinamica:
L’oscillazione acustica viene quindi riflessa dalle pareti del combustore e ritorna indietro influenza la fiamma, ma la sua influenza può essere tale da smorzare la perturbazione originaria o aumentarla innescando così un ciclo instabile.
d Perturbazione
in alcune variabili termodinamich e e/o del fluido
Fluttuazioni nel rilascio i calore Eccitazione di oscillazioni acustiche che si propagano lasciando la zona di combustione Riflessione alle pareti della camera Perturbazione in alcune variabili termodinamiche
e/o del fluido
In quest’ultimo caso, e solo in questo, si parla di instabilità di combustione in quanto, ad ogni ciclo la perturbazione viene alimentata con una nuova quantità di energia e cresce con il tempo.
Ma ad un certo punto, dalle osservazioni sperimentali, la crescita viene interrotta, e si ha una saturazione.
Il meccanismo di saturazione potrebbe essere dovuto allo smorzamento del processo che aumenta, con l’ampiezza della perturbazione, più velocemente del processo che genera la perturbazione stessa, o ad altre cause non ancora ben definibili.
Si raggiunge così un ciclo limite stabile e il sistema inizia ad oscillare.
Per elevati livelli di rilascio termico, le onde di pressione possono indurre delle vibrazioni che possono danneggiare la struttura fisica del combustore stesso.
Le condizioni necessarie alla creazione dell’instabilità termoacustica rimasero sconosciute per molto tempo.
Il fenomeno fu osservato per la prima volta da Higgins nel 1777, fu documentata per la prima volta da Tyndall nel 1897, e fu scientificamente descritta da Lord Rayleigh nel 1878.
Lord Rayleigh spiegò la natura delle interazioni fra rilascio di calore e onde acustiche proponendo la seguente caratterizzazione:
Siaθpq l'angolofra l'oscillazionedipressione eil rilasciotermico: Se 0°<θpq <90° ⇒ le due oscillazioni sono in fase
à Instabilit sistema del o Smorzament ione Amplificaz ⇒ >>
Se 90°<θpq <180° ⇒le due oscillazioni sono fuori fase(Stabilità)
La versione formalizzata della caratterizzazione precedente:
∫
∫
+ + − ′ ′ ≅ ′ ≅ ′ − ≅ ′ ′ = T t t T t t dt ) t ( u ) t ( p ) t ( u ) t ( q dt ) t ( q ) t ( p R τ τ τ termico rilascio il e particelle delle acustica velocità di o cambiament fra ritardo il è che Dato dove T= periodo di oscillazioneq’ = componente non stazionaria della velocità di rilascio del calore R= indice di Rayleigh
Dalla relazione (denominata criterio Rayleigh ) si evince che: “ Se le due oscillazioni (pressione-calore, o pressione-velocità) :
- sono fuori fase allora R<0 e l’oscillazione verrà attenuata ( è come se il calore aggiuntivo abbia aumentato lo smorzamento al sistema) - sono in fase allora R>0 e l’oscillazione verrà amplificata
se questa amplificazione sarà grande abbastanza da vincere lo smorzamento del sistema, si avrà instabilità termoacustica
Quindi, se la fiamma presente in un combustore è collocata in un punto dove le onde acustiche si combinano producendo un valore positivo di R , sarà possibile avere un’instabilità termoacustica.”
Una descrizione effettiva del processo di instabilità può essere effettuata in modo esauriente solo se si considerano anche le diverse modalità di funzionamento del combustore:
Instabilità che si verifica in regime di funzionamento laminare
Si è osservato come il moto laminare del fluido favorisca la formazione di una fiamma praticamente concentrata in una ben definita zona spaziale.
Instabilità che si verifica in regime di funzionamento turbolento
Si è osservato come il moto turbolento del fluido generi delle condizioni molto difficili da studiare.
La turbolenza può essere classificata in due diverse classi: Turbolenza presente alle pareti
Si generano delle “streak structure” (venature di turbolenza) alle pareti causate dalla vorticità delle forze di attrito al trascinamento
Turbolenza nella struttura dela fiamma
Il fronte di fiamma viene distorto da vortici di ampia scala causando così un drammatico incremento della superficie di fiamma
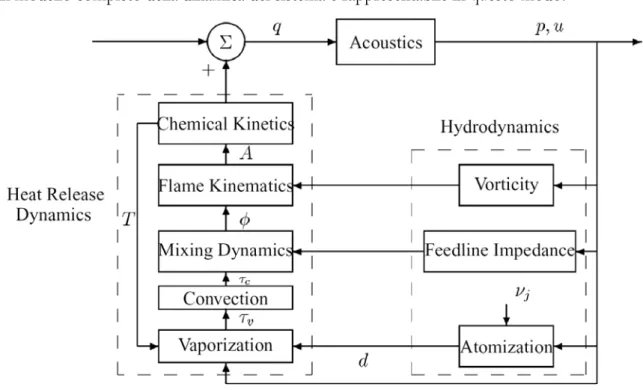
Il modello completo della dinamica del sistema è rappresentabile in questo modo:
Figura 1-5 Modello completo della dinamica dei processi nel combustore Tale modello è però spesso semplificato per ragioni di praticità eliminando la parte idrodinamica, e ottenendo così:
Figura 1-6 Modello semplificato della dinamica dei processi nel combustore
1.2- Classificazione ed analisi dei possibili modelli
Nella tabella presentata nella pagina seguente, è riportata una classificazione dei modelli comunemente utilizzati in letteratura per descrivere il fenomeno.La classificazione è stata fatta considerando la seguente metodologia: • condizioni di moto in camera
o dimensioni del flusso in camera – linearità/non linearità del rilascio termico
Modelli in condizioni non turbolenti
- alti numeri Damkohler e bassi numeri di Reynolds Re<2300 a cui corrispone un Φ∈
[
0.48÷0.65]
Modello a tubo 1-dim completamente aperto
(Modelli c.a.)
- Moto idrodinamico principalmente dovuto al rilascio del calore laminare
- Fiamma piatta e laminare
- Bassa frequenza di perturbazione - Piccolo rilascio di calore
- L’idrodinamica è completamente assente, esiste solo la relazione di accoppiamento fra la pressione acustica e il rilascio di calore
- Con diverse sottomodellazioni del rilascio termico sempre lineari, che quindi non spiegano il ciclo limite Modello a Tubo 1-dim
chiuso da un lato (Modello di Rijke)
Stesse ipotesi effettuate sopra
Modelli a tubo c.a. o di Rijke con Non linearità
aggiuntive
Stesse ipotesi effettuate sopra, ma si rimuove l’ipotesi di rilascio termico lineare
Il modello permette la simulazione del ciclo limite Modelli 2-dim lineari Si considerano i fenomeni dal punto di vista 2-dim Modelli in condizioni turbolenti Re>2300
Modelli per la spiegazione della turbolenza
(basati sulla risoluzione delle equazioni di Navier Stokes )
1D Reynolds-averaged Navier-Stokes – RANS 2D-3D Large Eddy Simulations (LES)
Modelli semplificati per turbolenza di piccola scala a numeri Damkohler e numeri di Reynolds intermedi (2300< Re<6000)
Modelli derivanti da metodologia di identificazione non
lineare
- si utilizzano strutture tipo Van der pol
) t ( u ap dt dp ) p ( dt p d − − 2 + = 2 2 1 ε Modelli derivanti da metodologia di identificazione lineare
- si utilizzano strutture tipo Box-Jenkis
∑
∑
∑
= + = = ∆ − + ∆ − + ∆ − = c n i i b n k n k n i i a n i iy(t i t) bu(t i t) ce(t i t) a ) t ( y 0 11.3- Analisi dei modelli in condizioni non turbolenti
1.3.1 – Modello a tubo completamente aperto
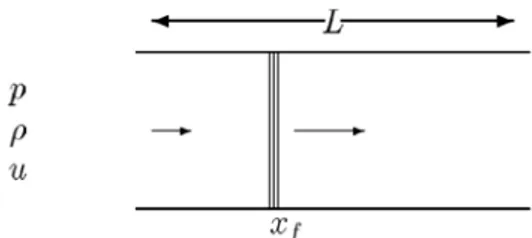
Il modello della camera di combustione assume le stesse caratteristiche e viene sviluppato a partire dalla schematizzazione seguente (Lecomb)
Figura 1-7 Modello non turbolento a tubo completamente aperto
Si assume che:
• il flusso sia unidimensionale nella direzione longitudinale del combustore ( questa ipotesi è valida quando le frequenze acustiche considerate sono minori rispetto alla frequenza di taglio del combustore) le onde considerate sono planari e tutti i modi sono longitudinali
• Il fluido ha viscosità trascurabile, così gli effetti di dissipazione nelle onde acustiche sono trascurabili
• La conducibilità termica nei bordi è trascurabile
• Il gas è perfetto in entrambi i lati della zona di combustione • Il flusso è stazionario
• E’ presente una sorgente di calore nel campo
Le equazioni che descrivono la pressione e la velocità del campo che si crea, sono date da:
= t tempo = x spazio = ρ densità u=velocità (trasversale) = p pressione =
e energia interna specifica
=q flusso di calore rilasciato per unità di volume
=
R costante del gas
=
T Temperatura assoluta
Combinando l’equazione di continuità con l’equazione dell’energia, e quella del gas perfetto ( ricordando che:
1 − = = = γ ρ ρ p R p C T C e v v ) si ha che: (5)
dato che si è interessati al comportamento del sistema in relazione a piccole
perturbazioni, si può linearizzare il sistema separando le variabili presenti nella loro componente media (funzione della sola coordinata spaziale) e in una piccola perturbazione ( funzione dello spazio e del tempo), ossia:
dove: =
)
( valor medio della grandezza
)
( ′• =Fluttuazione della grandezza
1. Per lo stazionario: Basta sostituire lo sviluppo delle grandezze e imporre la stazionarietà nel sistema di equazioni di partenza, ottenndo così
2. Per la perturbazione: Basta sostituire la fluttuazione delle grandezze nell’equazione del momento e nell’equazione (5), ottenendo così:
Analisi del sistema di equazioni per la perturbazione
Assumendo ora che la zona di fiamma sia localizzata in , si ha che le componenti medie delle variabili sono essenzialmente costanti sulla lunghezza del combustore, eccetto che avere una variazione a gradino per , e quindi
f x f x Dirac di delta volume di unità per rilascio calore di Flusso = • = ′ − ′ = ′ ) ( ) t ( q ) x x ( ) t ( q ) t, x ( q f f f δ δ
A basso numero di Mach, l’effetto del gradino sulla pressione è trascurabile se comparato con la variazione del valor medio della velocità o della densità e il gradiente spaziale della pressione media può essere considerato piccolo
Derivando così rispetto al tempo la prima equazione del sistema perturbato e rispetto alla x la seconda equazione, dopo un po’ di manipolazioni algebriche, si ottiene:
q
= =
c u
= = ρ γp
c velocità del suono media Effettuando manipolazioni algebriche sulla (11), si ottiene:
Le equazioni (14) e (15) la pressione acustica e la velocità del campo, guidate da un rilascio di calore non stazionario q′
Per molto piccoli valori del numero di Mach, le equazioni (149 e (15) possono essere ulteriormente semplificate, ottenendo così:
Soluzione dell’omogenea:
Si noti come la generica soluzione dell’equazione d’onda omogenea è pari a : dove: = ) x (
ψ è denominata funzione di base e descrive le componenti spaziali della soluzione dell’equazione d’onda
=
) t (
η rappresenta la componente temporale
=
k è il numero d’onda =
0
φ fase dell’onda
Sia k che φ0 sono determinate dalle condizioni al contorno e danno la forma ai modi spaziali
Nel caso in esame, essendo la schematizzazione della camera pari ad un tubo aperto in entrambi i lati, le condizioni al contorno possono essere espresse come segue:
p′ 0( ,t)= p′(L,t)
Da cui, risolvendo l’equazione 19 con queste condizioni al contorno, si ha che: K , , ,π π φ0 =0 2 K , , , n L n k= π =123
Si noti, come esistano un insieme infinito di soluzioni discrete al variare di n, per questo ψ(x) si dice che rappresenta i modi lungo il tubo.
Di seguito sono riportati i primi 3 modi, relativi alla schematizzazione effettuata, si noti come i punti dove i modi sono 0 sono detti nodi, mentre i punti in corrispondenza dei quali i modi assumono valore massimo sono detti anti-nodi.
Figura 1-7 Modi – soluzione dell’omogenea La soluzione temporale η(t), dipende dalle condizioni iniziali.
La soluzione p′(x,t) rappresenta l’autofunzione relativa all’autovalore k
Quindi si può dire che la soluzione dell’equazione (18), definisce un onda spaziale stazionaria nel tubo che evolve con un frequenza di oscillazione
x k
n =
ω (ed una lunghezza d’onda pari a n
ω π τ = 2 )
Soluzione dell’equazione con termine forzante:
Si considera ora proprio l’equazione 16 completa, in cui l’equazione d’onda è perturbata da un termine forzante proporzionale alla velocità di cambiamento del rilascio termico per unità di aerea.
Una soluzione per l’equazione d’onda forzata può essere derivata
assumendo la validità della soluzione spaziale dell’omogenea e integrando l’equazione sopra il termine forzante
In questo modo si può derivare l’espressione analitica della soluzione, ma fisicamente risulta più interessante mostrare l’effetto del calore rilasciato dalla sorgente attraverso il criterio di Rayleigh.
Infatti questo mette in evidenza come, il guadagno e la fase del rilascio di calore rispetto a quelli posseduti dalla pressione sono cruciali nel
verificarsi del fenomeno di instabilità
A tal fine, occorre effettuare un bilancio energetico per il combustore , si può allora notare come:
• il campo acustico (ospitato dal tubo che modella il combustore) è il principale meccanismo di immagazzinamento dell’energia presente nel combustore stesso
• L’aumento o la diminuzione dell’energia di questo campo può essere ottenuta esercitando lavoro o scambiando calore con il campo stesso
• In questo modello, la fiamma è considerata una sorgente di calore localizzata, così solo un piccolo volume nel campo acustico è scaldato, il piccolo volume si espande che esercita lavoro sul campo
La densità di energia acustica e′ relativa al campo acustico unidimensionale, può essere derivata dalle equazioni di conservazioni e assume la seguente forma:
dove:
il primo termine è l’energia cinetica acustica il secondo termine è l’energia potenziale acustica
E’ chiaro che, ogni sistema che vuole sostenere delle onde deve avere queste due componenti di energia, ed è proprio la periodica conversione dall’una all’altra forma che sostiene il comportamento oscillatorio
Si possono riscrivere le equazioni (11) e (12) per velocità media nulla, e nessun cambiamento spaziale del valor medio delle variabili:
Applicando i seguenti operatori:
(
24)
(
Eq.25)
p p . Eq u′× + ′× γ ed
utilizzando l’eq. 23, si ha:
integrando l’equazione 26 sia nel tempo (su un periodo di oscillazione τ ) che nello spazio (su una lunghezza pari a ), si ottiene : L
dove
∆τ,∆L = variazioni di tempo e lunghezza
Il termine a sinistra nell’equazione 27 rappresenta il cambiamento dell’energia acustica per sezione trasversale di area del combustore
Il primo termine a destra rappresenta l’integrarle di Rayleigh, il secondo termine il flusso di energia acustica attraverso una superficie di controllo posta nel campo (è definito come E′= p′u′) e il terzo termine quantifica la dissipazione nel campo acustico.
Si può allora vedere come, quando il criterio di Rayleigh è soddisfatto p′ e q′ sono in fase e il guadagno del primo termine a destra è talmente elevato da superare sia la dissipazione che il termine di flusso energetico( tipicamente piccolo), così si assisterà ad un incremento dell’energia acustica del combustore e l’instabilità termoacustica risulterà dominante
In un combustore il rilascio termico può essere perturbato:
• sia dalle fluttuazioni di fiamma ( che possono avvenire quando la fiamma è sensibile alle fluttuazioni delle variabili acustiche o
, ciò forzerà nella fiamma delle ondulazioni periodiche che aumenteranno/diminuiranno la sua area superficiale complessiva cosa che influenzerà il rilascio non stazionario di calore)
p′
u′
• sia dalle fluttuazioni del rapporto di equivalenza della reazione ( che possono avvenire quando le perturbazioni nel campo acustico influenzano le condizioni di ingresso di uno dei reagenti (aria o combustibile) prima della miscelazione, che a loro volta
influenzano il rapporto di equivalenza che si traduce in perturbazioni nel rilascio non stazionario di calore)
se queste perturbazioni sono tali da comportare una fase di e 90°, si và in instabilità.
p′ q′
≤
1.3.2 – Modello a Tubo chiuso da un lato ( Modelli di Rijke)
Figura 1-8 Modello di Rijke
Determinazione dei modi fondamentali
Di seguito verrà sviluppato solo una trattazione acustica per la determinazione dei modi fondamentali
Dall’equazione di Eulero, e dal fatto che è presente una geometria piana, si può scrivere che:
( )
+ = = = = = + = − = ∂ ∂ = + − ) deflettore senza pistone un (5) come esterno all' suono il irradia apertura L' 6 0 4 1 esce) che radiazione dela impedenza all' uguale essere deve (4) L in onda dell' impedenza l' che imposto è Si L in contorno al Condizione 3 0) in contorno al Condizione 0 0 2) piana) pressione di onda dell' e Espression 1) Eulero) di Equazione 2 0 ( ka . j ka c z ( z ) t , L ( u ) t , L ( p : L x ) ( ( ) t , x ( u : x ( ( Be Ae ) t , x ( p ( ( ) t , x ( u j x p Rad Rad x jkx t j jkx t j ρ ωρ ω ωDerivando l’espressione di p(x,t) rispetto allo spazio (2) si ottiene: p(x,t) jkAej t jkx jkBej t jkx x + − + − = ∂ ∂ ω ω
Sostituendo l’espressione precedente nell’equazione di Eulero (1) si ha:
c Be c Ae c , c k j jkBe j jkAe ) t , x ( u jkx t j jkx t j jkx t j jkx t j ρ ρ ω ωρ ωρ ω ω ω ω + − + − − = = = = = − = fluido nel suono del velocità Essendo
Imponendo ora la condizione al contorno per x=0
Aejωt −Bejωt =0 ⇒ A−B=0 ⇒ A=B
(
)
) ( ) kL cot( c j ) kL ( jsen ) kL cos( c ) kL ( sen ) kL ( sen ) kL cos( ) kL cos( : che Dato ) kL ( jsen ) kL cos( ) kL ( jsen ) kL cos( ) kL ( jsen ) kL cos( ) kL ( jsen ) kL cos( c ) ( jsen ) cos( e : che Dato e e e e c c Be Ae Be Ae ) t , L ( u ) t , L ( p j jkL jkL jkL jkL jkL t j jkL t j jkL t j jkL t j 6 2 2 ρ ρ ρ θ θ ρ ρ θ ω ω ω ω = − = − = − − = − = = + − − + − + + − + − = = − = = − + = − + = −− ++ + − + −Imponendo la condizione di risonanza, si ha che Re(• )=0
zRad c
( )
ka j0.6ka cj0.6ka (7) 4 1 2 ρ ρ = + =Uguagliando così la (6) e la (7), si ha:
) ( ka . ) kL cot( ka . cj ) kL cot( c j 8 6 0 6 0 = ⇓ =ρ ρ
L’equazione (8) può essere risolta numericamente, oppure può essere risolta ricordando che, per ka<<1: ) ( ) ka . tan( ) kL cot( ) ka . tan( ka . 9 6 0 6 0 6 0 ≅ ⇓ ≅
La (9) può essere risolta in questo modo:
) ( ) ka . kL cos( ) ka . ( sen ) kL ( sen ) ka . cos( ) kL cos( ) ka . cos( ) ka . ( sen ) kL ( sen ) kL cos( ) ka . tan( ) kL cot( 10 0 6 0 0 6 0 6 0 6 0 6 0 6 0 = + ⇓ = − ⇓ ≅ ⇔ ≅
π π π π ω π − = + = = ⇓ = − = + 2 1 2 2 6 0 2 2 2 1 2 1 2 6 0 n a c f . L c f c f c k che Dato , , n n a k . L k n n n n n K ( ) a . L n c a . L n c f eff L n 11 6 0 4 1 2 6 0 2 1 2 2 1+4243 − = + − =
dove fn sono denominate le autofrequenze del sistema, ed n numero del modo
Ad esempio:
Una conduttura chiusa-aperta, caratterizzata da: - temperatura ambiente - c 343= m/s - L 60= inches - a . inches 2 85 2 =
ha i primi sette modi a frequenze pari a : (si ricorda che 1inch=0.0254m)
Determinazione sperimentale di uno spettro per il modello
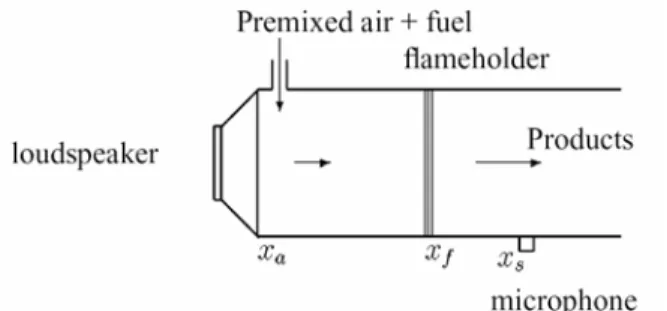
Figura 1-9 Apparato di validazione sperimentale del modello di Rijke Definito un certo range operativo, mediante una prima analisi sulla camera di combustione si può determinare la mappatura della:
- pressione acustica
- distribuzione di temperatura - chemiluminescenza
Per poter ricavare informazioni sui modi instabili e il ciclo limite si può seguire la seguente procedura:
- portare il combustore alle condizioni operative volute ( con un determinato φ e Q ) Tot
- rilevare il segnale di pressione rilevato dal sensore posto più vicino all’estremità finale del combustore.
- Determinare lo spettro del segnale in esame - Analizzare lo spettro
Supponendo di lavorare a φ=0.60 e QTot =120 cc/ s, lo spettro rilevato sperimentalmente nell’articolo può essere il seguente:
Figura 1-0-10 Spettro del segnale di pressione estratto dall'apparato Nello spettro si può distinguere:
1. La regione intorno a 180 Hz in cui è visibile l’oscillazione del ciclo limite. In questo caso, dalla tabella delle frequenze ( calcolata per un tubo aperto da un solo lato), tale frequenza è circa la frequenza della prima armonica. Per il criterio di Rayleigh, il combustore a questa frequenza è instabile
2. La regione a bassa frequenza (10-20 Hz) contiene un picco visibile che, secondo ipotesi fatte in vari articoli, può essere causato da un’instabilità dovuta ad un fiamma pulsante.
Esperimenti effettuati al variare del rapporto di combustione hanno prodotto il risultato visualizzabile nella figura seguente.
Figura 1-11 Spettri del segnale di pressione al variare del rapporto di equivalenza
1.4- Analisi dei modelli in condizioni turbolenti
1.4.1 – Caratteristiche della turbolenza
Per caratterizzare la turbolenza è necessario investigare la struttura della turbolenza stessa, così da definire quali azioni causeranno determinati cambiamenti.
La turbolenza presente in camera è di due tipologie. a. turbolenza presente alle pareti
b. turbolenza nella struttura della fiamma (dovuta alla combustione stessa)
Di seguito verranno analizzate le due tipologie di turbolenza evidenziando i metodi di analisi comunemente utilizzati per investigarle.
1.4.2– Modelli per la caratterizzazione della turbolenza di
fiamma
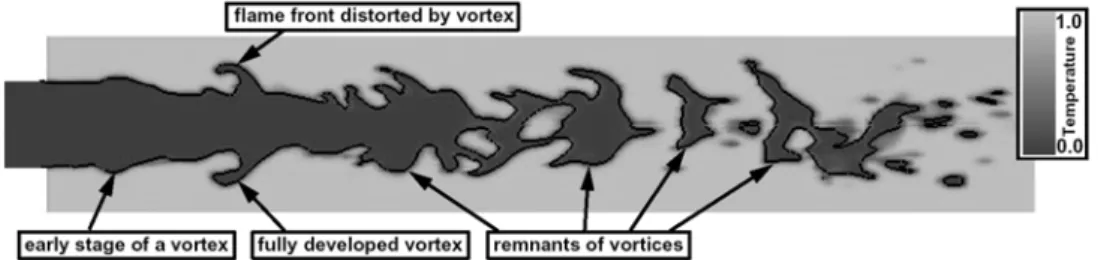
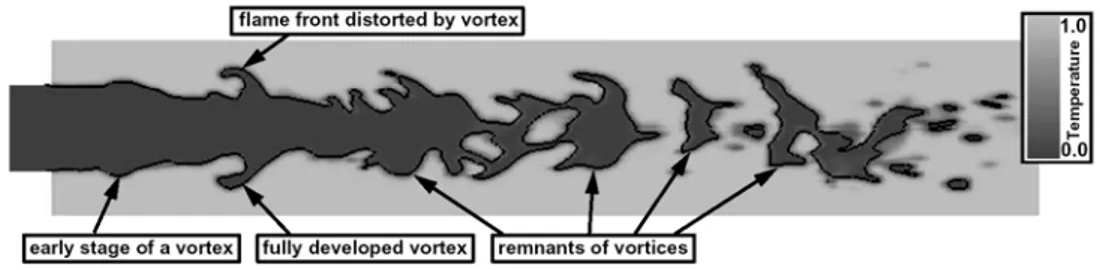
Figura 1-10-2 Turbolenza di fiamma
Nell’instabilità di combustione caratterizzata da vorticità nella struttura della fiama, un ruolo di primaria importanza è assunto:
- dalla presenza di una struttura coerente, vicino al nozzle , di gas incombusti
- un drammatico incremento della superficie della fiamma
Ciò comporta che i gas freschi bruciano rapidamente e in diversi momenti, il conseguente rilascio termico non stazionario crea un onda acustica che, caratterizzata da una propria costante di tempo, genera una perturbazione acustica.
Questa, a sua volta genera una nuova struttura coerente nello strato di shear (Crow & Champagne 1971; Ho & Huang 1982; Ho & Huerre 1984) vicino al nozze.
Ancora una volta può essere utilizzato il criterio di Rayleigh per determinare la possibilità di autoamplificazione del processo.
Se il rilascio termico è in fase con l’onda acustica si origina una nuova in omogeneità, e questo ciclo sarà poi ripetuto con una certa frequenza.
Per comprendere meglio il ruolo della turbolenza e la dinamica che la governa, visti i recenti progressi nei pacchetti di calcolo numerico, un approccio molto utilizzato è quello di formulare e risolvere direttamente le equazioni di Navier-Stokes, cosi da ottenere direttamente le caratteristiche del flusso principale così da dettagliare l’origine, lo sviluppo
e il decadimento della struttura turbolenta su larga scala. Si cerca di impiegare il minor numero di approssimazioni possibili così da riprodurre al computer sempre più fedelmente, il fenomeno della turbolenza.
Le tecniche che si basano su tale approccio sono rdette tecniche di tipo DNS (Direct Numerical Simulation)
Esistono pacchetti che risolvono il problema 1D nella formulazione denominata
Reynolds-averaged Navier-Stokes – RANS (standard k−ε model), ma sono inadeguati a
rappresentare molti fenomeni (es. la separazione).
Esistono altri pacchetti denominati Large Eddy Simulations (LES) che sono molto più completi
Di seguito verranno riportate le simulazioni svolte utilizzando un LES solver proprietario, dal Center for Turbulence Research (Pierce & Moin 1998).
Per semplicità, le simulazioni sono state effettuate nell’ipotesi di basso numero di Mach, così da trascurare la comprimibilità della miscela e quindi assumere che le perturbazioni si propaghino istantaneamente senza ritardo.
Così, l’accoppiamento fra eccitazione e risposta della fiamma è in un solo passo (one-way coupling)
Di seguito è riportato il modello utilizzato per la camera di combustione, e un risultato della simulazione:
Figura 1-10-3 Esempi di simulazione per la turbolenza di fiamma
Appare molto chiara la formazione degli anelli vorticosi, le cui porzioni più scure denotano i confini di una zona in cui il flusso è soggetto ad una torsione antioraria, le porzioni più chiare denotano i confini di zone in cui il flusso è soggetto a torsioni orarie. Si nota in modo inequivocabile la deformazione del fronte di fiamma (rigonfiamento), che fa cadere le ipotesi su cui si sono basati i modelli precedenti.
1.4.3- Modelli per la caratterizzazione della turbolenza
presente alle pareti
Anche per quanto riguarda la turbolenza alle pareti si utilizzano metodologie basate sulla filosofia DNS.
Simulazioni hanno rivelato la presenza di strutture vorticose quasi ordinate denominate “streak structure” (strutture a vena) che dominano il moto del fluido nel campo di turbolenza presente vicino alle pareti.
Tale vorticosità è dovuta alle forze di attrito di trascinamento, che devono essere in qualche modo ridotte
La turbolenza alle pareti è accompagnata da un moto vorticoso che si genera in un sottile strato(strato limite) lungo le pareti stesse contenete alti gradienti di velocità (lo stesso strato limite che si osserva quando un aeroplano o una macchina si muovono in un fluido).
Tale turbolenza ha alcuni aspetti negativi come l’aumento della forza di attrito di trascinamento di 100 volte rispetto a quella presente in un flusso non turbolento (laminare) e l’aumento del rumore complessivo
Ma ha anche degli aspetti positivi quali l’aumento del trasferimento di calore tra la parete e il fluido e la riduzione della separazione dello strato limite ( che è importante per le turbomacchine adibite al trasporto)
L’obiettivo del controllo della turbolenza alle pareti è quello di ridurre gli effetti negativi (specie la forza di attrito di trascinamento) e di innalzare gli aspetti positivi (specie l’innalzamento del fenomeno di trasferimento del calore)
1.5- Classificazione ed analisi delle possibili
architetture di controllo attivo
Nella tabella presentata nella pagina seguente, è riportata una classificazione delle possibili architetture di controllo dell’instabilità utilizzati in letteratura.
Scelta la particolare architettura si disegna un compensatore dinamico, i cui parametri al cambiare della condizioni operative devono essere determinati di nuovo dall’operatore Per piccole variazioni operative, la robustezza del controllore progettato, assicura ancora un soddisfacimento degli obiettivi.
Per alte variazioni operative, l’operatore deve effettuare un nuovo tuning dei parametri del controllore e si
Un problema da affrontare nella progettazione del controllo attivo è che le condizioni di funzionamento (ad esempio il carico di potenza richiesto) del combustore può variare causando un cambiamento nella dinamica dell’impianto.
Se ciò si verifica, la frequenza del ciclo limite può cambiare, e ciò richiederebbe una nuova riconfigurazione del controllore
Bisogna conoscere l’esatto comportamento della non linearità per predire l’impatto che avrà il controllore sul sistema fisico.
Se non si riesce a conoscere la struttura e i valori della non linearità, si parte dallo spettro del segnale di pressione relativo ad una particolare condizione di funzionamento e si disegna il controllore in funzione della specifica frequenza instabile che si desume dallo spettro del segnale di pressione stesso.
Considerando una combustione non turbolenta
è un approccio basato sull’utilizzo di un altoparlante come attuatore e un microfono come sensore di pressione
end-mounted loudspeaker. side-mounted loudspeaker loudspeaker
forcing
fuel-forcing
prevede che l’attuatore inserisca una quantità extra di combustibile ( e in alcuni casi di aria) in modo che si produca un rilascio termico
addizionale. fuel flow- modulation On-Off (PWM) Controllo attivo fuel spray modulation continua
Considerando una combustione turbolenta
Si utilizzano i tre approcci seguenti insieme, può eventualmente mancare il controllo della turbolenza alle pareti
Utilizzo di piccoli fori concentrici che soffiano il flusso coassiale nella camera di combustione
Tale flusso coassiale trasporta circa il 5% del flusso di massa principale e può essere utilizzato in due diverse strutture di controllo:
1- controllo statico mediante flusso coassiale ad alta velocità
Si sposta l’origine della vorticità su larga scala fuori dal fronte di fiamma Lo shear layer fra il flusso coassiale e la zona di ricircolo crea vortici di larga scala, mentre lo shear layer fra il flusso principale e il flusso coassiale crea una zona a bassa vorticità, così in quest’ultima zona la differenza di velocità è piccola
Sebbene l’intensità delle strutture coerenti non siano cambiate , la loro influenza decresce dato che l’origine di questi vortici è fuori il fronte di fiamma Controllo Passivo (Intervento strutturale sulla camera)
2- controllo mediante flusso coassiale swirlato
La generazione di una vena di flusso longitudinale distrugge le strutture turbolente su larga scala e favorisce il miscelamento su piccola scala Per far ciò si conferisce mediante lo swirl una componente nella terza dimensione allo shear layer.
Si genera così una vena di vorticità orientata longitudinalmente che contrasta la creazione di vorticità nel main shear layer
Controllo della turbolenza di fiamma
Attivo In genere viene utilizzato un controllo attivo basato sulla modulazione del flusso
Controllo della
turbolenza alle pareti Per la turbolenza alle pareti, si cerca di ridurre la forza di attrito utilizzando micro bolle e metodologie di controllo basate su algoritmi generici o reti neurali
1.6- Combustione non Turbolenta – controllo attivo
con end-mounted loudspeaker
1.6.1– Controllo attivo statico basato sul modello fisico
Figura 1-0-14 Schema del combustore con un End-Mounted loudspeaker
1.6.1.1. Con rilascio laminare-dinamica dell’attuatore e del sensore
semplificate
Ora, si può introdurre nel modello la posizione generica dell’altoparlante, ottenendo così un modello utile a questo tipo di controllo.
Si assume di nuovo che:
• il rilascio di calore sia localizzato spazialmente a x=xf • siano presenti piccole perturbazioni
• il gas sia perfetto
• si possano trascurare i fenomeni di trasporto
• si possano trascurare gli effetti medi di inserzione del calore e di flusso
• la fiamma è modellata come una superficie sottile con una velocità di combustione costante Su tale che Su << u
• Si noti come, la sorgente acustica pari al loudspeaker si assume a a
x x=
• Gli effetti di bordo, possono essere considerati come sorgenti acustiche virtuali da aggiungere, e sono introdotte implicitamente
imponendo una distribuzione spaziale di pressione di forma dipendente dalle condizioni al limite
• Moto laminare
Sotto queste ipotesi, al modello del combustore decritto precedentemente ( tubo) và aggiunto un termine derivante dalla generazione di onde di pressione da parte del loudspeaker stesso, ossia, le nuove equazioni assumono la forma:
dove p′e u′ sono le perturbazioni di pressione e velocità, c è la velocità media del
suono, γ è il rapporto di calore specifico, è la collocazione dell’i-esimo altoparlante è la velocità del diaframma dell’i-esimo altoparlante,
i a
x
i c
v αri e il rapporto fra le aree
trasversali dell’i-esimo loudspeaker e del combustore stesso (
A As ri =
α )
Da queste equazioni può essere ottenuto un modello di dimensioni finite utilizzando il metodo di Galerkin (T.Myint-u and Debnath, 1987):
= i k numero d’onda = 0 i φ shift fase
Sia k che i φi0 sono determinate dalle condizioni al contorno e danno la forma ai
modi spaziali
Sostituendo così le (3) e (4) nell’equazione (1) e (2), e considerando per semplicità la presenza di un solo Loudspeaker si ottiene
dove: p a , γ γ θ 1 5 0 0 − = =
tale sistema di equazioni evidenzia come la velocità di rilascio del calore influenza l’acustica del sistema.
I parametri del processo di combustione ( incluso il flusso a regime e la stabilizzazione della fiamma) determinano come la velocità di rilascio del calore risponda dinamicamente alla velocità di una perturbazione.
A seguito delle ipotesi fatte sulla fiamma, la relazione dinamica fra la velocità non
stazionaria di rilascio del calore e la velocità non stazionaria della fiamma che si trova a e che viene indicata con u
f
q′
f
x
x= ′ può essere così espressa: f
dove
(
)
fiamma di fronte nel virtuali buchi di numero fiamma di fronte del Diametro bruciata non miscela della densità miscela nella massa di unità per termico rilascio di velocità 1,2 1 4 2 = = = = ∆ ÷ ≈ ∆ = = f u r r u f p f p u f n D q q n D d g d S ρ ε ρ ε ε ωSupponendo che la larghezza di banda del Loudspeaker sia molto maggiore delle frequenze acustiche così da poterlo modellare come una sorgente di accelerazione nel range delle frequenze acustiche stesse
La dinamica del sensore può essere trascurata, ciò è vero anche se il sensore è un microfono di tipo capacitivo in quanto la sua larghezza di banda è molto ampia se paragonata con il campo di frequenze acustiche, ciò permette la sua modellazione in termini di guadagno puro
Il modello dinamico completo assume quindi una forma pari a: dove
(
)
) x x x x x ) x ( c ) x ( a E b~ ) x ( dx d k c~ ) x ( E a b~ p ) t , x ( p y g a b a f f a s s i i c a i r i c f i i i f i i s f f f > = = = = = = = ′ = − = ( fiamma di fronte del posizione r Loudspeake del posizione microfono del posizione 1 fiamma della tica caratteris frequenza 1 2 0 0 ψ ψ γ ψ γ ψ γ θ ωIl modello dinamico completo consiste quindi in 5 equazioni:
Ogni ulteriore ingresso aggiuntivo che si vuole considerare dovrà essere aggiunto al secondo membro Eq. (8)
L’Eq.9 rappresenta la dinamica della fiamma L’Eq.11 rappresenta la dinamica dei sensori
L’Eq.12 rappresenta la dinamica (che in questo caso è semplificata) dell’attuatore
Essendo il sistema di equazioni lineare, può essere espresso in forma I/U mediante la trasformata di Laplace, definendo così la generica funzione di trasferimento del sistema:
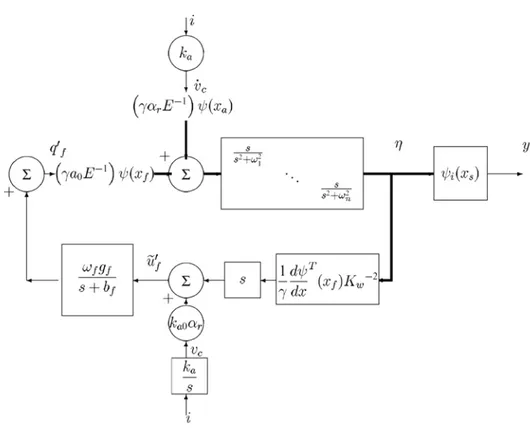
Che può essere rappresentata schematicamente mediante il seguente diagramma a blocchi:
Figura 1-15 Schema a blocchi del sistema con loudspeaker end-mounted
!
Si noti che:
L’espressione della funzione di trasferimento risulta particolarmente semplice da calcolare nel caso si consideri un solo modo.
L’espressione della funzione di trasferimento nel caso si considerino due modi assume la forma:
Nel caso di assenza di controllo i=0 ⇒ vc =0
Modello ad un solo modo: ( di frequenza ω )
Tale modello è utilizzato quando si ammette l’implicita presenza di un solo modo dominante, si ha quindi che, la funzione di trasferimento assume la forma pari a:
dove.
ω = frequenza acustica dominante
(
f)
ff
f a g
b =ω 1−θ 0 frequenzacaratteristicadellafiamma≅ω
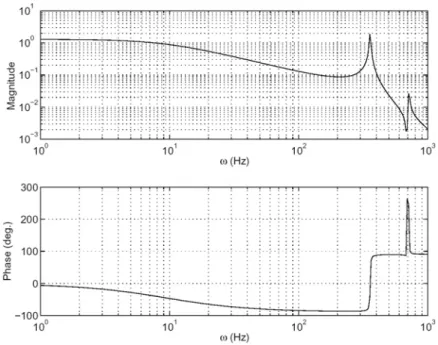
Supponendo di aver considerato una frequenza dominante pari a ω=357 Hz, ed una ω~f =10 Hz, si ha un andamento del digramma di Bode pari a:
Figura 1-16 Diagramma di Bode per un solo modo relativo a End-Mounted L.
Dove si può notare come la risposta in frequenza del combustore può essere divisa in due parti distinte:
la bassa frequenza: ω <200 Hz la fase e il guadagno di W sono dovute alla dinamica della fiamma. Quindi, la funzione di trasferimento può essere approssimata con l’espressione
) s ( f p ~ k ω + 1 s ) s ( ≅ W
l’alta frequenza: ω >300 Hz i modi acustici dominanti sono instabili
Sempre nell’ipotesi di considerare la fiamma ferma, la funzione di trasferimento può essere così fattorizzata:
dove
f
~
s+ω = dovuto ancora alla dinamica della fiamma = dovuto al modo acustico 2 1 1 2 2 a a s s − ζω +ω
= dovuto al modo acustico 2 2 2 2 2 a a s s − ζω +ω 2 z s+ω = effetto di antirisonanza
Supponendo di aver considerato un modo fondamentale a frequenza instabile pari a ω=357 Hz, e una seconda armonica a frequenza stabile pari a ω=714 Hz ed unaω~f =10 Hz, si ha un andamento del digramma di Bode pari
Figura 1-17 Diagramma di Bode per due modi relativo a End-Mounted L.
Dove si può notare come la risposta in frequenza del combustore può essere divisa in due parti distinte:
la bassa frequenza: ω <200 Hz la fase e il guadagno di W sono dovute alla dinamica della fiamma. Quindi, la funzione di trasferimento può essere approssimata con l’espressione
) s ( f p ~ k ω + 1 s ) s ( ≅ W
l’alta frequenza: ω >200 Hz la fase e il guadagno di W sono dovute alla dinamica acustica. Si noti come in questo range frequenziali siano presenti du picchi di risonanza, dove, quello a 700 Hz è dovuto all’azione combinata della frequenza di antirisonanza a 687 Hz e al modo stabile alla frequenza di 714 Hz. E possibile effettuare un’ulteriore divisione di questo intervallo considerando:
) s (
• 400<ω <600 Hz: E’ l’inetrvallo fra la frequenza acustica stabile e quella instabile,. Qui la fase si mantiene circa costante a 90°, il comportamento del combustore può essere allora modellato in questo modo:
( )
s k s per[
Hz, Hz]
W ≈ p2 ω∈ 400 600
1.6.1.1.1 Controllo Attivo
Figura 1-18 Schema del controllo attivo per un combustore con End-Mounted L.
Esistono diverse metodologie di sintesi del controllo basato su modello, di seguito verranno analizzate le principali:
Sintesi del controllo basata su tecniche classiche:
In genere la struttura del controllore prevede un filtro passa banda con un filtro phase shifter.
Presenta il fenomeno del “peak-splitting.” , ossia la nascita di un ulteriore picco di instabilità. L’instabilità di partenza viene ridotta, ma nasce un ulteriore picco di
instabilità non precedentemente presente Le ipotesi che sono state fatte sull’origine di questo fenomeno mettono in evidenza come il principale responsabile sia il roll-off della fase del filtro passabanda a banda stretta utilizzato per separare la frequenza instabile dal rumore del segnale di pressione
Sintesi del controllo basata su tecniche ottime: Fra le tecniche ottime spiccano:
LQG
L’idea che sottende l’utilizzo di un controllore LQG è quella di disegnare un controllore che oltre a stabilizzare il sistema ottimizzi simultaneamente un indice di costo quadratico nello spazio degli stati e degli ingressi.
+ = + + = v x C y w u B x A . x w=
( )
0,I ,v=(
0,µI)
x&)= Ax)+Bu+H(Cx)−y) u =−KxSi può scegliere un ingresso di controllo in modo che per alcuni valori del fattore di scala
i
λ venga minimizzato il seguente indice di costo:
Dall’applicazione della procedura, si perverrà ad un controllore della forma:
(
sI a BK H)
H K ) s ( G y ) s ( G i lqr lqr 1 − + + − − = =L’ordine di è lo stesso di quello di W e i suoi parametri sono determinati in base alla forma del funzionale , che in questo caso
richiede che la risposta di pressione decada il più velocemente possibile con un piccola spesa nel controllo.
) s (
Glqr (s)
J
Il parametro λ soppeserà le esigenze di velocità della risposta e spesa del controllo .
Aumentando λ, si penalizzerà la spesa sul controllo cosa che
indirettamente permette di aggiustare l’effetto della saturazione presente negli organi di attuazione
Si può inoltre notare come rappresenti fisicamente l’energia totale del sistema, così una sua minimizzazione significa una minimizzazione dell’energia totale del sistema e di conseguenza, il controllore LQR
permetterà di ottenere delle performance soddisfacenti su l’intero range di frequenze dove il modello che si utilizza risulta valido.
J
In letteratura (Anderson and Moore, 1990) si è dimostrato come la funzione di costo sia equivalente a J
dove y) e iˆ sono le trasformate di Fourier dell’ingresso e dell’uscita e questo dimostra come LQG non sopprima solo le oscillazioni alle frequenze instabili ma sull’intero range di frequenze “catturate” dal modello utilizzato.
LQG-LTR
Un importante vantaggio di questo approccio è che non comporta l’introduzione di una nuova instabilità.
La robustezza può essere assicurata cambiando i guadagni della funzione di costo
con tuning su ρ
H_Infinity
Garantisce un livello scelto di robustezza del controllore, ma ha lo svantaggio di non essere presente un modo naturale di includere le specifiche fatte nel tempo
I pesi W1 e W2 sono scelti e iterati in modo da venire incontro alle
specifiche fatte nel dominio del tempo
Per assicurare la robustezza considerando un errore di modello delta_P, il peso W è scelto in modo tale che.
Il controllore disegnato con questa tecnica risulta essere di ordine molto elevato e la sua implementazione richiede una riduzione dell’ordine.
1.6.1.1.1.1 Controllo Attivo basato su tecniche classiche Per modello a due modi: ( di frequenza ωa1,ωa2 )
Per avere più attinenza alla realtà ci si riferirà ad un esempio numerico: Si supponga di aver rilevato il segnale di pressione e che questo presenti due picchi notevoli alle frequenze ωa1 =357Hz,ωa2 =714Hz, nella figura seguente è riportato lo spettro del segnale accuratamente filtrato:
Figura 1-19 Spettro di potenza di un segnale di pressione a ciclo aperto E’ giustificato quindi l’utilizzo di un modello contenente due soli modi di oscillazione pari proprio alle frequenze rilevate sperimentalmente
Hz ,
Hz a
a1 =357 ω 2 =714
ω ,
Supponendo che la camera di combustione, il gas e la fiamma abbiano le seguenti caratteristiche:
Parametri Valore
Lunghezza del combustore 0.49 m Fessure presenti nel
modello della fiamma 80 fessure Diametro delle fessure
presenti nel modello della fiamma
Piazzamento del sensore 0.075 m dalla fine Parametri del gas
(modellato come gas perfetto) 3 15 1 350 350 1 4 1 m / kg . s / m c K T atm p . = = ° = = = ρ γ Calore di reazione ∆qr =2,563*106J /kg
(è circa il calore di reazione della miscela aria/propano ad un rapporto equivalente di 0.8)
u
S Su =0,4m/ s
θ θ =0.5
ε ε =1.2
Da questi parametri è possibile calcolare l’espressione della funzione di trasferimento in modo numerico che risulta essere pari a:
considerando ora le seguenti tipologia di controllore: Caso A: 4 4 4 3 4 4 4 2 1 43 42 1 ) s ( b G b b b b ) s ( a G A s s a s a s K ) s ( G 2 2 2 1 2ζ ω ω ω + + + − =
Supponendo di aver tarato il controllore per tentativi, con i seguenti risolutati: A K KA =9 b ω ωb =286Hz b ζ ζb =0,7 a a 485= Hz
(si è scelto il più vicino possibile a ωa1)
Si noti come il filtro di Butterworth si è tarato per eliminare le frequenze più alte di ωa1
Da cui, la funzione di trasferimento del controllore ha il seguente diagramma di Bode:
La risposta nel tempo del sistema complessivo compensato con il controllore in esame, e il suo spettro assumono l’andamento riportato di seguito ( andamento in relazione all’andamento del sistema a ciclo aperto):
Figura 1-20 Diagramma di Bode del segnale di pressione a ciclo chiuso
Si noti come:
o si è avuta una sostanziale diminuzione del picco di risonanza a la presenza di un picco di risonanza vicino a
Hz
a1 =357
ω , questo come risultato dell’azione del controllore che si è appunto esplicitata scegliendo il più vicino possibile a
a
1
a ω
o si può anche osservare la presenza di un picco di
risonanza alla frequenza di 135 Hz che non è presente nel sistema ad anello aperto, il controllore ha quindi eccitato questo modo che non era stato eccitato ad anello aperto
Se si concentra l’attenzione sul range di frequenze ω <200Hz si può vedere come:
o La risposta del controllore A non differisca di molto da
quella del sistema 1 2 2
2 b b b b s s ) s ( ω ω ζ G ω ′ + ′ ′ + ′ = 75 0. , con 123Hz, b′ = ζ′= ω
o Il sistema in anello aperto è qui approssimabile con la funzione f p ~ s k ) s ( ω + ≅ 1 W o Complessivamente si ha che: Caso B: 4 4 4 4 3 4 4 4 4 2 1 4 4 4 3 4 4 4 2 1 43 42 1 ) s ( p G D D D N N N ) s ( b G b b b b ) s ( a G A s s s s s s a s a s K ) s ( G + + + + + + + − = 2 2 2 2 2 2 2 1 2 2 2 ζ ω ω ω ω ζ ω ω ζ ω
Supponendo di aver tarato il controllore per tentativi, con i seguenti risolutati:
A K KA =9 b ω ωb =286Hz b ζ ζb =0,7 a a 485= Hz
(si è scelto il più vicino possibile a ωa1) N ω ωN =334Hz N ζ ζN =0,07 D ω ωD =557Hz D ζ ζD =0,04
Si noti come il filtro di Butterworth si è tarato per eliminare le frequenze più alte di ωa1
Da cui, la funzione di trasferimento del controllore ha il seguente diagramma di Bode:
Lo spettro della risposta nel tempo del sistema complessivo compensato con il controllore in esame, assume l’andamento riportato di seguito ( andamento in relazione all’andamento del sistema a ciclo aperto):
Si noti come:
o si è avuta una sostanziale diminuzione del picco di risonanza a la presenza di un picco di risonanza vicino a
Hz
a1 =357
ω , questo come risultato dell’azione del controllore che si è appunto esplicitata scegliendo il più vicino possibile a
a
1
a ω
o si può anche osservare la presenza di un picco di risonanza alla frequenza di 135 Hz, come avveniva con l’altro controllore (A) che non è presente nel sistema ad anello aperto, il controllore ha quindi eccitato questo modo che non era stato eccitato ad anello apertoIn questo caso, rispetto al caso di controllore A, il picco è più piccolo
o Si genera un ulteriore picco, non presente nel sistema ad anello aperto, centrato alla frequenza 560 Hz. Se ora si confrontano le fasi dei due rispettivi controllori, queste sono praticamente identiche per tutte le frequenze meno alla frequenza di 200 Hz
Ma tale differenza di fase a questa frequenza è determinata dalla fase introdotta da G , che ha la sua massima azione proprio fra 400 e 500
Hz
) s ( p
E’ quindi come se il picco aggiuntivo in 560 Hz, fosse determinato dalla sola azione di Gp(s)
Se si concentra l’attenzione sul range di frequenze ω <400−600Hz si può vedere come:
o La risposta del controllore A non differisca di molto da quella del sistema
(
)
(
2)
1 1 1 2 1 2 1 2 s s s s c s s s s k ) s ( G ω ω ζ ω′ + + + = 05 0 700 550 1 1 1 Hz, s Hz, s . s , con = = ′ = ω ζ ωo Il sistema in anello aperto è qui approssimabile con la funzione W(s)≅kp2s
1.6.1.1.1.2 Controllo Attivo basato su tecnica ottima LQG Per modello a due modi: ( di frequenza ωa1,ωa2 )
Per avere più attinenza alla realtà ci si riferirà allo stesso esempio numerico precedente:
Utilizzando una varianza del rumore pari a e settando , il controllore LQG che ne risulta è dato da:
4 10 4 − = x µ λ= x1 10−5 I risultati grafici:
Con LQG si ottiene un controllore che ha prestazioni migliori rispetto ai controllori sintetizzati con approcci classici, (tempo di assestamento
notevolmente più basso, assenza di picchi secondari) ma si perde in robustezza.
1.6.1.2. Con rilascio laminare-dinamica effetti del flusso medio e
dell’aggiunta di calore medio- con dinamica dell’attuatore non
semplificate
Si assume di nuovo che:
• Effetti della viscosità e della conduzione del calore trascurati • Effetti acustici monodimensionali
• il rilascio di calore sia localizzato spazialmente a , con un flusso di calore per unità di superficie pari a
f
x x=
f
• siano presenti piccole perturbazioni intorno al valor medio • La fiamma premiscelata abbia una superficie media conica con
piccolo angolo di vertice • il gas sia perfetto
• si possano trascurare i fenomeni di trasporto
• la fiamma è modellata come una superficie sottile con una velocità di combustione costante Su tale che Su << u
• Si noti come, la sorgente acustica pari al loudspeaker si assume a a
x x=
• Gli effetti di bordo, possono essere considerati come sorgenti acustiche virtuali da aggiungere, e sono introdotte implicitamente imponendo una distribuzione spaziale di pressione di forma dipendente dalle condizioni al limite
• Moto laminare
In questo modello non si trascureranno gli effetti del medi di flusso e di inserzione del calore, infatti, il valor medio della velocità del flusso non è nullo e c’è una
componente media di rilascio termico non trascurabile, che causa un significativo cambiamento nella velocità e nella densità e nella temperatura dei gas riscaldati.
Si può far vedere come, proprio a seguito di questa componente media di rilascio termico,
) x ( u ), x ( ), x (
c ρ hanno una variazione istantanea a gradino per x=xf che li porta ad assumere un altro valore costante per x>xf , ossia:
> < = f f x x per c x x per c ) x ( c 2 1 > < = f f x x per x x per ) x ( 2 1 ρ ρ ρ > < = f f x x per u x x per u ) x ( u 2 1
Applicando il seguente cambiamento di coordinate:
Anche la forma dei modi di oscillazione varia a seguito della presenza di questa componente media di rilascio termico, in particolare da ψ(x)=sin
{
kx+φ}
passa a:ψ(x)=sin
{
kex+φe}
dove:
In particolare, il cambiamento più importante dovuto a questa componente media di innesto di calore sulle proprietà di stabilità è il cambiamento del fronte di fiamma da
a : f x x= x~f =xf +α xf dove: − + − − = L x c c L x c c L x f f f 1 1 1 2 1 2 1 α
infatti, finisce vicino ad un nodo o ad un antinodo, l’inserzione di calore sposta in
f
x xf
f
x~ e può quindi causare una transizione da modo stabile a instabile e viceversa
Il modello della dinamica di attuazione è pari a:
la dinamica fra ( tensione di ingresso) e l’accellerazione del diaframma , nell’ipotesi di piccole ampiezze di ingresso può trascurare gli effetti magnetici dell’induttanza,
ottenendo così: a
v x&&l
dove:
ml=massa del loudspeker
bl= friction del loudspeker
kl= stiffness del loudspeker
k1= guadagno di calibrazione
1.6.2– Controllo attivo statico basato sull’identificazione del
modello
Il controllo attivo statico basato sull’identificazione di modello cerca di pervenire alla conoscenza del modello stesso utilizzando apposite tecniche che si basano sull’approccio denominato Black-box.
I dati provenienti dalle uscite reali del sistema sono utilizzati per fittare una particolare struttura di modello la cui scelta dipende dalle principali caratteristiche del sistema che si devono catturare.
Una delle principali caratteristiche del processo di combustione durante la sua evoluzione instabile, è la presenza di un ciclo limite che fa si che la crescita iniziale del segnale di pressione si stabilizzi in un’oscillazione.
E’ possibile definire due diverse tipologie di approcci nell’identificazione di modelli per l’instabilità di combustione:
Approccio basato sull’identificazione separata di ogni sottosistema che compone il processo
Tali modelli sono guidati dalla conoscenza della struttura feed-back del sistema in esame e prevedono di identificare separatamente la dinamica acustica mediante un modello lineare, la dinamica di rilascio termico mediante un modello non lineare
Approccio basato sull’identificazione globale del sistema considerando la N.L
In questo ambito la principale tecnica di identificazione è quella denominata
Nonlinear Harmonic Balance Technique
Struttura del modello dove: forzante della ampiezza F sec) / rad ( forzante della frequenza f = = ω
Parametrizzazione della non linearità f &(x)
Per facilitare l’accorpamento della non linearità nella struttura del sistema , questa viene parametrizzata come somma di funzioni polinomiali note, moltiplicate per coefficienti incogniti..
Così l’insieme dei polinomi diventa una base di espansione della funzione non lineare e i coefficienti incogniti sono legati in modo lineare.
Esistono molteplici possibilità per effettuare questo sviluppo, un modo molto usato è il seguente:
I coefficienti Ni sono incogniti che andranno calcolati.
Estendendo questa parametrizzazione all’utilizzo di k funzioni di base, si può riscrivere l’equazione che modella il sistema in questo modo:
Determinazione dei coefficienti incogniti
(
m,c,k,Ni)
• Esprimendo in frequenza le diverse grandezze si ha:
• Risolvendo il sistema lineare si ottengono i coefficienti incogniti
Approccio basato sull’identificazione globale del sistema considerato Linare
Prediction Error Methods
Tali metodi scelgono una struttura parametrica per il sistema e determinano i parametri utilizzando una routine di minimizzazione dell’errore fra uscita reale e uscita predetta dal modello stesso.
La struttura più generale possibile per il modello è quella denominata BJ
Harmonic Balance
La metodologia si articola nei seguenti passi: - Struttura del modello:
- Sviluppo dei termini presenti:
- Ragruppamento dei termini:
- Definizione del sistema
- Risoluzione del sistema
Il sistema viene risolto con il metodo dei minimi quadrati:
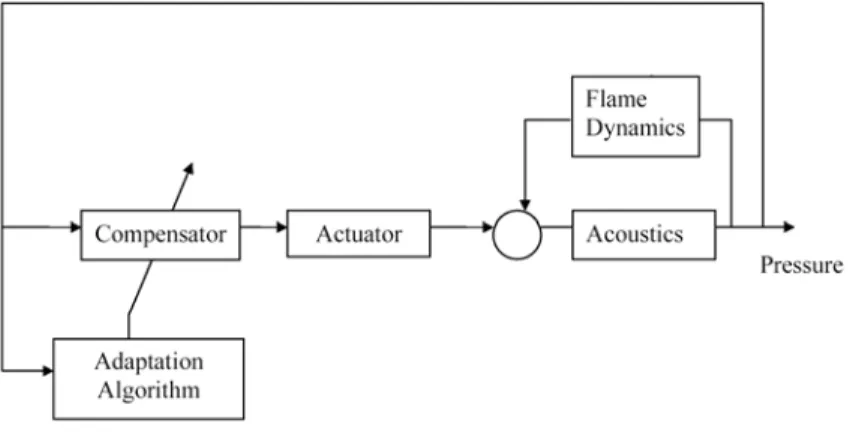
1.6.3– Controllo attivo dinamico
Il controllo attivo dinamico viene utilizzato se si prevede che le condizioni operative del combustore avranno ampie variazioni.
L’approccio è quello del controllo adattivo, dove il controllore varia i propri parametri in funzione dei cambiamenti che avvengono nell’impianto.
Figura 1-21 Schema di un controllore attivo dinamico implementato su end-mounted L. In questo senso sono presenti in letteratura molti studi e molti approcci diversi:
o Artificial neural network adaptive control approaches
Si costruisce una rete neurale artificiale in grado di predire la dinamica a ciclo aperto del combustore, quando questo lavora in una data condizione di
funzionamento. Si utilizzano così i parametri per effettuare l’aggiornamento dei parametri del controllore, permettendo così al controllore di auto aggiornarsi in funzione del punto di lavoro del combustore