Metodi di rimozione e scelta dei
detriti
Lo scopo di questo capitolo è introdurre i vari metodi di rimozione dei detriti, presentando, in particolare, vantaggi e svantaggi di un metodo basato su schiume espandibili [5]. L’idea alla base di tale sistema è lo scambio di quantità di moto aumentando l’effetto della resistenza atmosferica per deorbitare in maniera non controllata un dato detrito orbitante in orbita terrestre bassa.
Si descrivono anche le tipologie di schiuma considerate in quest’analisi, in particolare quelle che, una volta espanse, possiedono una densità minore a quella dell’aria e.g. 0,2 𝑘𝑔/𝑚! (aerografite) [25]. Utilizzando dei modelli analitici di ordine ridotto è possibile calcolare il raggio della
sfera di schiuma ed il conseguente rapporto area-‐massa per ogni detrito che garantisce un rientro entro 25 anni, limite stabilito dalla IADC [26].
L’analisi si è concentrata su tre tipologie di detriti che sono stati identificati come quelli più ad alta priorità. La lista e le caratteristiche di questi oggetti sono presentati e si introducono dei modelli matematici per valutare l’efficacia del metodo.
3.1 Metodi di rimozione
Recentemente il problema dei detriti spaziali è stato affrontato in numerosi studi. Tali lavori si sono concentrati sia su metodi di rimozione attiva [27] sia sulle possibili tecniche da usare per deorbitare i satelliti operativi a fine vita [28]. I metodi di rimozione possono essere riassunti come [28]:
1 – Metodi elettromagnetici (cavi elettromagnetici, tether, o vele magnetiche).
2 – Metodi di scambio della quantità di moto (vele solari, sistemi per l’aumento della resistenza atmosferica).
3 – Metodi remoti (laser). 4 – Metodi di cattura (reti).
5 – Metodi di modifica delle proprietà del materiale o di cambio dello stato del materiale.
Ogni metodo è da considerarsi in base alle caratteristiche fisiche ed orbitali del detrito obiettivo, ad esempio: i metodi per l’aumento della resistenza atmosferica sono efficaci per orbite LEO, dove l’effetto della densità atmosferica è rilevante. In quest’analisi si considera un metodo basato proprio su questo principio, cioè la riduzione della quantità di moto del detrito per opera della resistenza atmosferica aumentando significativamente il suo rapporto area-‐massa.
In generale, esistono diversi tipi di strategie di rimozione attiva di detriti, applicabili a ognuno dei metodi descritti; tenendo conto della grande varietà di oggetti, diversi per dimensione, forma, e posizione, si possono classificare tre macro categorie di strategie:
• Uno a uno: ogni detrito, in funzione della sua dimensione, è raggiunto e rimosso. Questo significa che deve essere progettata, sviluppata e lanciata una piattaforma per ogni singolo detrito.
• Uno a molti: una singola piattaforma identifica e rimuove un certo numero di detriti. Questi possono essere tutti o dello stesso tipo oppure di differenti tipologie e dimensioni.
• Uno a qualsiasi: con questo tipo di metodi si va a deorbitare un qualsiasi oggetto in una data orbita. A questa categoria appartengono quei metodi che si basano su fattori fisici globali o a strategie di deorbitamento incontrollato.
La seconda categoria sembra essere quella che offre maggiori vantaggi; nel primo caso bisognerebbe progettare e lanciare un satellite per rimuovere un solo detrito, operazione molto dispendiosa, sia in termini
economici che di tempo. Nel terzo caso, invece, la strategia può risultare pericolosa anche per tutti i satelliti attivi orbitanti in regioni attigue a quelle dei detriti stessi.
Quindi, utilizzando la strategia uno a molti, l’idea è quella di utilizzare un semplice sistema per aumentare la resistenza atmosferica dei detriti. Una volta completato il rendez-‐vous con il detrito obiettivo, la piattaforma rilascia una schiuma su esso, in grado di espandersi e assumere una forma approssimativamente sferica. In questo modo il rapporto area-‐massa, relativo al detrito, aumenta considerevolmente indipendentemente dall’assetto e, la maggiore influenza della resistenza atmosferica causa una perdita di quota più veloce rispetto al deorbitamento naturale.
I principali vantaggi di questo metodo sono:
• Non serve alcun tipo di meccanismo per agganciarsi al detrito, quindi le manovre sono meno rischiose e non ci sono tutti i problemi tecnologici connessi a questa delicata fase.
• Poiché la schiuma, nello spazio si assume espandersi in maniera approssimativamente isotropica, il detrito assume una forma sferica che mantiene durante la sua fase di deorbitamento e quindi non è necessario alcun controllo di assetto.
• Le schiume sono più resistenti rispetto ai cavi elettromagnetici o alle reti.
• La forza di resistenza è l’unica che provoca il cambio di quantità di moto ed è sempre presente fino a quando il detrito non brucia negli strati alti dell’atmosfera.
Un effetto a cascata di pulizia dello spazio da micro detriti è un ulteriore vantaggio collaterale di questo metodo. Qualora la schiuma (le cui esatte caratteristiche sono al di fuori dello scopo della presente tesi e che dovrebbe esser sviluppata per questo scopo specifico) sia in grado di mantenere un certo potere adesivo, se il detrito schiumato dovesse incontrare altri micro detriti durante il suo rientro, questi rimarrebbero attaccati alla superfice sferica deorbitando con essa.
3.2 Le schiume espandibili
Le schiume espandibili sono sostanze a struttura cellulare, tipicamente bi-‐fasiche, costituite da una matrice solida o liquida in cui coesiste una fase gassosa, e possono essere: metalliche, ceramiche, vetrose o polimeriche [29]. Ogni tipo di schiuma espandibile presenta differenti proprietà meccaniche, fisiche e termiche in funzione di diversi fattori. I principali sono:
• La natura del solido che costituisce la matrice. • La natura del gas all’interno delle celle.
• La sua porosità.
• La tipologia di struttura cellulare.
Variando in modo opportuno questi fattori si possono realizzare differenti tipi di
schiume, secondo
l’utilizzo cercato. La maggior parte delle schiume espandibili presenti in commercio sono utilizzate per scopi diversi, principalmente come isolanti termici o acustici [30]. Alcune di queste si espandono fino a 280 volte il loro volume iniziale altre, invece, addirittura fino a 1000 volte [30]. È stato studiato che per pressioni molto basse l’espansione è maggiore che in atmosfera, poiché avviene a causa di una differenza di pressione tra il gas all’interno delle celle e l’ambiente esterno. Nella Fig. 16 viene mostrata una struttura espansa.
Diversi tipi di schiume sono già utilizzati per applicazioni spaziali, ad esempio come rivestimento dell’ogiva del lanciatore Ariane 5 [31], per proteggere i satelliti dalla forte pressione acustica esercitata sul razzo durante la fase di lancio [31]. Il Solimide, una schiuma a base di poliammide, grazie alla sua resistenza alle elevate variazioni di temperatura e alla sua flessibilità, è utilizzata come isolante sullo Space Shuttle e sui serbatoi di carburante criogenico di grandi propulsori.
Per lo scopo di questa tesi, la schiuma deve essere aderente, in modo da formare un tutt’uno con il detrito, e deve avere un alto fattore di
Figura 16 -‐ Esempio schematico di una struttura espansa [30]
espansione, così da ottenere una sezione trasversale più ampia a parità di massa con una schiuma con il fattore di espansione più basso. La densità del polimero non espanso deve essere più bassa possibile, così, a parità di massa di lancio, la piattaforma risulterà più leggera e sarà in grado di schiumare un maggior numero di detriti in una singola missione. La schiuma deve essere in grado di degradarsi molto lentamente per evitare che il rapporto area-‐massa diminuisca durante la fase di deorbitamento.
Le schiume poliuretaniche bicomponenti, che già provate sia in aria che in vuoto allo scopo di supportare il metodo di rimozione presentato [5], possono rappresentare un buon candidato per questo tipo di applicazione. La loro densità, una volta espanse, si aggira intorno a 1 𝑘𝑔/𝑚!, con un fattore di espansione pari a 1000. La PROCHIMA produce una classe di schiume poliuretaniche bicomponenti chiamata ESPAK [32], sono formulati liquidi bi-‐componenti, poliolo e isocianato, esenti da freon; gli espansi hanno un’elevata resistenza all’urto e alla compressione, stabilità dimensionale e basso indice di assorbimento d’acqua. Nella Fig. 17 è mostrata una foto dell’ESPAK 90 (il numero sta ad indicare il valore della densità dell’espanso) espanso in un bicchiere di plastica con diverse quantità iniziali di componenti [32].
Figura 17 -‐ ESPAK 90, esperimenti fatti con la schiuma poliuretanica bi-‐ componente prodotta dalla PROCHIMA. [32]
3.2.1 Aerografite
Recentemente è stato scoperto un materiale con una densità più bassa di quella dell’aria, l’aerografite [31]. È un materiale di colore nero, a base di carbonio, ed è stato realizzato da ricercatori delle università di Amburgo e di Kiel; è costituita di nanotubi con pareti porose di carbonio finemente intrecciati fra loro [31]. Per realizzarlo i ricercatori non sono partiti dal carbonio, bensì da ossido di zinco, usato per creare uno scheletro attorno cui modellare il materiale e destinato, alla fine del processo, a scomparire.
Il primo passo è stato trasformare l’ossido di zinco da una sostanza polverosa in un cristallo, servendosi di un forno e di temperature intorno ai 900°C. Questo cristallo ha così funzionato da scheletro, poiché è costituito da una serie di tetrapodi, strutture che forniscono la
base per la formazione della rete di nanotubi che caratterizza l’aerografite, vedi Fig. 18.
Una volta ottenuto il cristallo questo è stato posizionato all’interno di
un reattore per
sintetizzare il materiale finale attraverso un processo noto come deposizione chimica da vapore. In pratica viene spruzzato carbonio in forma gassosa, così da guidare la deposizione di un sottile strato di grafite, spesso appena pochi atomi, sopra i tetrapodi del cristallo.
Contemporaneamente, anche l’idrogeno è iniettato nel reattore, così che, reagendo con l’ossigeno dell’ossido di zinco liberi vapore di zinco in forma gassosa. Di fatto sgretolando lo scheletro attorno cui si è depositata la grafite. Il processo è regolabile, così che se l’espulsione dello zinco è accelerata, i tubi di carbonio rimarranno più porosi, conferendo più leggerezza al prodotto finale.
Le principali proprietà fisiche e chimiche dell’aerografite risultante da tale procedimento sono:
Figura 18 -‐ Struttura reticolare dell'aerografite[rif]
• Densità pari a 0.2 𝑘𝑔/𝑚!, circa 75 volte più leggera del polistirolo.
• Superelastico.
• È in grado assorbire parte della radiazione luminosa. • Capace di condurre l’elettricità.
• Può sopportare compressioni fino al 95% del suo volume e poi tornare alla forma originaria.
• Può assorbire, ossidare e decomporre eventuali inquinanti. • Idrorepellente.
L’aerografite è stata classificata come il materiale più leggero del mondo[31], infatti la sua densità è molto più bassa di quella delle ogni altra schiuma nota. Di contro essa non possiede un fattore di espansione particolarmente elevato, ma in futuro può essere sviluppata una tecnologia in grado di aumentarlo.
Nell’analisi di missione studiata, si ipotizza che il detrito venga schiumato con una schiuma in grado di espandersi con un fattore pari a 1000 e avente una densità uguale a quella dell’aerografite.
3.2.2 Dimensionamento della sfera di schiuma
Per stimare il tempo di deorbitamento di un detrito, è necessario prima calcolare l’area trasversale della sfera di schiuma e quindi calcolare il rapporto area-‐massa (A/m) del detrito definito da [33]:
𝐴 𝑚= 𝜋𝑟! 4 3 𝜌!𝜋𝑟!+ 𝑚! (41)
dove r è il raggio della sfera di schiuma, 𝜌! la sua densità e 𝑚! è la massa iniziale del detrito.
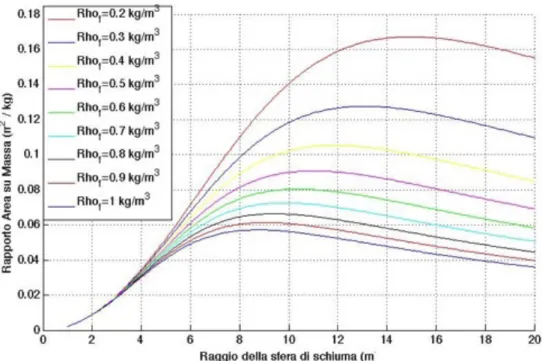
Fissando un valore arbitrario per la massa del detrito, ad esempio 1400 kg (per la giustificazione di tale valore si veda Par. 3.7), si può ottenere l’andamento del rapporto area-‐massa in funzione del raggio della sfera di schiuma per densità che variano da 0.2 𝑘𝑔/𝑚! a 1 𝑘𝑔/𝑚!, come riporta la Figura 19.
Figura 19 -‐ Andamento del rapporto area-‐massa rispetto al raggio della sfera di schiuma per diversi valori di densità.
Si nota che, da un certo punto in poi, all’aumentare della densità della schiuma, a parità di raggio della sfera, il rapporto area-‐massa diminuisce.
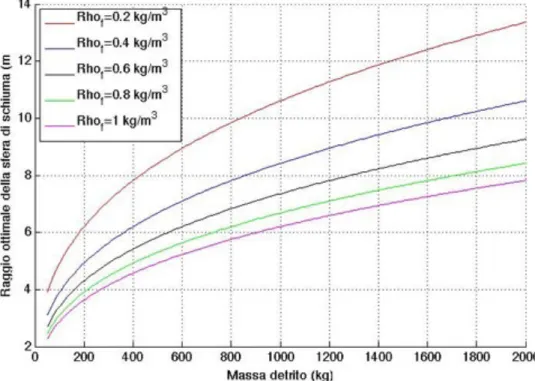
Facendo la derivata rispetto al raggio dell’equazione precedente, si ottiene il raggio massimo in funzione della massa del detrito e della densità della schiuma [33]:
𝑟!"# = 3 𝑚! 4 𝜋 𝜌! ! (42)
Nella Fig. 20 sono mostrati gli andamenti dei raggi ottimali, considerando masse di detriti da 50 kg a 2000 kg , a seconda di un valore di densità compreso tra 0.2 e 1 kg/𝑚!.
Figura 20 -‐ Andamenti dei raggi ottimali delle sfere di schiuma in funzione della massa del detrito, per densità diverse.
In questo tipo di analisi non è stato considerato il volume iniziale del detrito, quindi i valori ottenuti possono considerarsi conservativi.
Uno dei rischi di aumentare troppo il raggio della sfera di schiume è associato con l’aumento della probabilità d’impatto con altri detriti, che aumenta all’aumentare della superficie esposta. Tenendo conto anche di tale fattore, a parità di massa del detrito, il raggio ottimale aumenta al diminuire del valor densità [33].
3.3 Catalogo degli ultimi stadi dei lanciatori utilizzato
Tipicamente i primi stadi di un lanciatore sono espulsi ad altitudini sub-‐ orbitali, quindi il loro rientro avviene in un tempo molto breve. Gli ultimi stadi, invece, sono usati per dare un’ultima spinta al carico utile prima della fase di separazione, dopo la quale vengono allontanati con una manovra in genere a carico del satellite stesso. Una volta completata questa fase essi rimangono per molti anni in orbita; in base alla quota finale l’effetto della densità atmosferica può essere estremamente basso e non sono previsti altri metodi di deorbitamento.
Le ragioni per cui gli stadi sono detriti ad alta priorità sono [34]:
• Sono detriti incontrollati e di grande massa e dimensioni.
• Hanno una grande probabilità di collisione e possono creare molti altri detriti.
• Sono facilmente rintracciabili e la loro traiettoria è predicibile con sufficiente accuratezza.
• Hanno tutti caratteristiche in comune (corpi cilindrici, ugelli) che rendono il processo di cattura più semplice.
L’aspetto legale della loro rimozione, inoltre, è di solito meno complicato rispetto a quello di un satellite. Infatti, un satellite è responsabilità non solo del suo operatore ma anche del suo costruttore e del paese da cui è stato lanciato. E’ difficile definire chi debba pagare per rimuovere un satellite usato da una compagnia di telecomunicazioni britannica, costruito da un’azienda francese e
lanciato con un razzo russo. Per un lanciatore invece, la responsabilità è solo del paese di origine [34].
Il catalogo di detriti usato per questa analisi è creato dal database TLE [35]. Qualsiasi oggetto non classificato osservato dal NORAD può essere scaricato sotto forma di file di testo. E’ possibile effettuare una ricerca in base alla data di lancio, al paese d’origine, al numero di catalogo e alla sua posizione. Selezionando un oggetto è possibile risalire ai valori dei suoi parametri orbitali, in aggiornamento continuo. Il catalogo utilizzato è stato creato nel Febbraio 2012 e contiene circa 1629 stadi di lanciatori [35].
3.4 Distribuzione attorno alla Terra
Poiché ogni oggetto considerato ha caratteristiche differenti, si può restringere il campo di ricerca per certe tipologie. La Figura 21 mostra la distribuzione delle altitudini del perigeo e le eccentricità di tutti gli stadi superiori dei lanciatori che orbitano intorno alla terra.
E’ evidente come la maggior parte degli stadi finali siano situati in LEO. Gli altri sono situati ad un’altitudine di circa 20000 km e 35000km, dove sono presenti costellazioni di satelliti GPS e GLONASS. Per quanto riguarda l’eccentricità, la maggior parte delle orbite sono circolari, mentre le alte eccentricità sono dovute a quei lanciatori utilizzati per le orbite di trasferimento, come la GTO, o a particolari tipi di orbite come le Molniya [34]. Da queste osservazioni si può restringere il catalogo
considerando solo gli obiettivi in LEO e orbite quasi-‐circolari, le regioni in cui il metodo presentato è in grado di fornire i vantaggi maggiori.
Figura 21 -‐ Distribuzione orbitale degli stadi attorno alla Terra [34]
La Figura 22 mostra le distribuzioni delle inclinazioni e dei RAAN di circa 800 obiettivi che soddisfano i vincoli assunti (quota < di 1600 km ed eccentricità ≅ 0).
La distribuzione delle inclinazioni presenta una chiara area di interesse come le zone tra 70° e 80°, occupate principalmente da oggetti sovietici, oppure zone tra 95° e 105°, che corrispondono alle SSO [34]. Per quanto riguarda la distribuzione di RAAN, si nota subito che coprono tutti valori da 0° a 360° in maniera quasi uniforme.
Figura 22 -‐ Distribuzione orbitale degli stadi in LEO[34]
3.5 Proprietà fisiche
Le informazioni riguardanti la massa e le dimensioni dei potenziali obiettivi sono state prese da [36,37]. La Figura 23 mostra la distribuzione di massa e di volume degli obiettivi in LEO.
Si nota facilmente che la maggior parte degli obiettivi hanno una massa che si aggira su una tonnellata. Per alcuni oggetti, come gli stadi SL-‐16 da circa 9 tonnellate, è richiesta una certa flessibilità nel progettare la missione di rimozione del detrito.
Figura 23 -‐ Massa e volume degli stadi in LEO[34]
3.6 Contributo delle Nazioni
La Figura 24 mostra la partecipazione di ogni paese nella popolazione degli stadi in LEO.
La maggior parte degli stadi finali proviene dalla Russia (o ex Unione Sovietica). Gli Stati Uniti e la Cina vengono al secondo e terzo posto rispettivamente. Queste informazioni sono importanti per determinare la partecipazione finanziaria di ogni singolo paese nel caso di una collaborazione per rimuovere i detriti spaziali.
3.7 Aree di interesse e scelta dei detriti
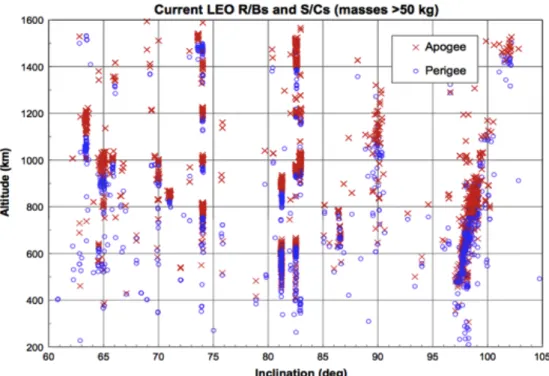
La Figura 25 mostra distribuzioni di stadi di lanciatori, con una massa superiore ai 50 kg. Le aree di interesse sono comprese in una fascia di altitudini che vanno da 200 a 1600 km, e in una fascia di inclinazioni comprese fra 60° e 105°. Si nota che le bande di inclinazione di maggior interesse occupano i valori relativi alle SSO. Le croci rosse e i cerchi blu rappresentano rispettivamente l’apogeo e il perigeo delle orbite occupate.
Figura 25 – Distribuzioni di R/Bs e S/Cs superiori a 50 kg in una fascia di altitudini compresa fra 200 e 1600 km, e una fascia d’inclinazioni compresa tra
60° e 105°. I pallini blu corrispondono al perigeo mentre le crocette rosse all’apogeo dell’orbita relativa all’oggetto. [34]
Nella Fig. 26 invece, vengono mostrati 500 oggetti (R/Bs e S/Cs) ad alta priorità, cioè quei detriti che possiedono una massa considerevole e un’alta probabilità di impatto.
Figura 26 -‐ Distribuzione di stadi e satelliti ad alta priorità di rimozione. I 500 oggetti ritenuti ad elevata pericolosità sono contrassegnati in verde[34]
Seguendo questo grafico ed eseguendo una ricerca approfondita basato sul catalogo costruito sono stati scelti 50 oggetti per ognuno dei tre tipi di stadi, quindi un totale di 150 detriti per fare un’analisi di missione preliminare. Gli oggetti sono stati scelti fissando un valore massimo di altitudine pari a circa 750 km e un valore minimo di 450 km. I candidati sono: • SL – 8 R/B • SL – 3 R/B • SL – 14 R/B
Tutti e tre gli stadi hanno pressoché una forma cilindrica e masse molto simili; le loro caratteristiche sono scritte in Tabella 2.
Massa (kg) Lunghezza (m) Diametro (m) Rapporto A/m (m^2/kg) SL -‐ 8 1440 6 2,4 0,007 SL – 3 1440 3,8 2,6 0,0053 SL -‐ 14 1407 2,58 2,25 0,0033
Tabella 2 -‐ Caratteristiche fisiche degli SL-‐8, SL-‐3 e SL-‐14[38]
Per calcolare il rapporto area-‐massa è stato necessario, prima calcolare le due aree, quella frontale e quella laterale. Una volta determinati tali valori si è applicata la media aritmetica delle aree per trovare un valore rappresentativo dell’area del detrito e da questo il valore del rapporto area-‐massa. Sono di seguito presentate le tre tipologie di detriti scelti più in dettaglio.
SL – 8
Gli SL–8 si trovano a un’altitudine media di circa 760 km, e tutte le orbite in cui si trovano hanno la stessa inclinazione di 74°. I valori del
RAAN variano in modo quasi uniforme da 0° a 360°. Nelle Fig. 27, 28 e
29 vengono riportate le distribuzioni di altitudine, inclinazione e RAAN rispettivamente, dei 50 detriti candidati.
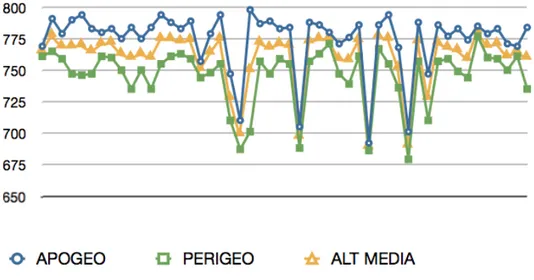
Figura 27 – Quote dell’apogeo e del perigeo, e altitudine media dei 50 SL – 8. I pallini blu rappresentano i valori della quota dell’apogeo, i quadratini verdi
quelli della quota del perigeo, mentre i triangolini gialli sono i valori delle altitudini medie.
Si nota come gli SL–8 siano distribuiti in una fascia compresa fra un’altitudine di circa 675 e 800 km.
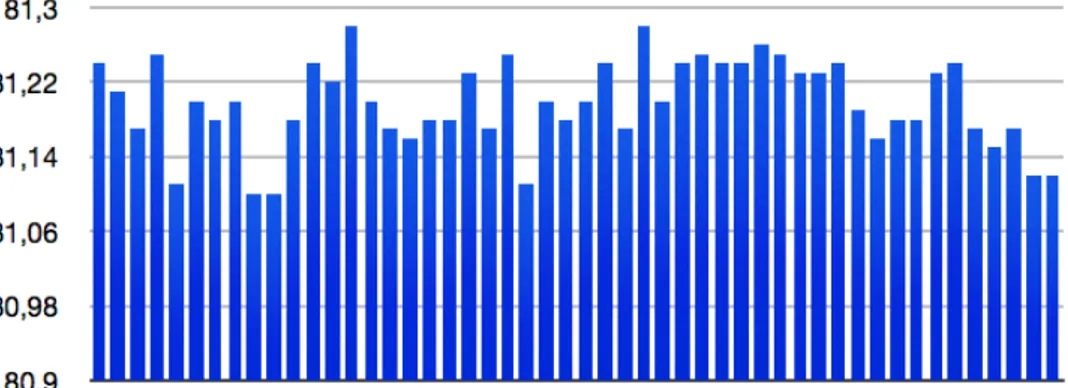
Figura 28 -‐ Distribuzione inclinazioni degli SL – 8.
Si nota che tutti gli SL–8 si trovano in una fascia molto stretta di inclinazione con valori compresi fra 74° e 74,08°.
Figura 29 -‐ Distribuzione RAAN degli SL -‐ 8
Come si nota dal grafico di Fig. 29, i valori di RAAN, compresi fra 50° e 300°, sono distribuiti in maniera abbastanza uniforme. I detriti sono stati ordinati per valori di RAAN crescenti.
SL – 3
La maggior parte di questi detriti si trova in una fascia di altitudine compresa fra 425 km e 600 km. Le loro orbite hanno un’inclinazione pari a circa 81°; anche in questo caso i valori dei RAAN sono uniformemente distribuiti tra 0° e 360°.
Figura 30 -‐ Quote di apogeo e perigeo, e altitudine media degli SL – 3. I pallini blu rappresentano i valori della quota dell’apogeo, i quadratini verdi quelli della quota del perigeo, mentre i triangolini gialli sono i valori delle altitudini
medie
La distribuzione delle inclinazioni è schematizzata invece nella Fig. 31, e varia tra un minimo di 81,1° a un massimo di 81,28°.
Figura 31 -‐ Distribuzione inclinazioni degli SL -‐ 3
Figura 32 -‐ Distribuzione RAAN degli SL -‐ 3
I valori dei RAAN, come mostrati in Fig. 32, sono ben distribuiti tra 20° e circa 240°. SL – 14
Gli SL–14 si trovano in una fascia intermedia di altitudine fra gli SL–8 e gli SL–3. Questi stadi si trovano in una fascia di altitudini comprese fra circa 600 km e 650 km, come si nota nella Fig. 33.
Figura 33 -‐ Quote di apogeo e perigeo, e altitudini medie degli SL – 14. I pallini blu rappresentano i valori della quota dell’apogeo, i quadratini verdi quelli della quota del perigeo, mentre i triangolini gialli sono i valori delle altitudini
medie
Le inclinazioni delle orbite hanno dei valori prossimi a 82,5°, in particolare variano da un massimo di 82,57° a un minimo di 82,48°, Fig. 34.
I valori dei RAAN hanno una distribuzione più ampia rispetto a quelli degli SL–8 e SL–3, infatti sono compresi fra un minimo di 0° e un massimo di 336°, come mostrato nella Fig. 35.
Figura 35 -‐ Distribuzione RAAN degli SL -‐ 14
3.8 Modelli atmosferici
Esistono diversi modelli dell’atmosfera terrestre superiore [17,38]. Questi sono stati costruiti usando sia i dati ottenuti dall’evoluzione orbitale di diversi satelliti sia da misure dirette di alcune proprietà atmosferiche compiute da veicoli spaziali, razzi sonda e radar terrestri. Si è così scoperto che la densità atmosferica è soggetta a continue e complicate variazioni, ancora solo parzialmente comprese, provocate principalmente dal Sole.
Stimare un valore preciso della densità atmosferica ρ è dunque molto difficile, perché le caratteristiche dell’alta atmosfera dipendono da fattori che non possono essere ottenuti con precisione. Avere un valore
di densità significa avere un valore ben preciso della forza aerodinamica agente sul satellite in orbita bassa e quindi una buona stima del tempo di deorbitamento.
I modelli atmosferici più utilizzati sono:
• Standard Atmosphere (USSA 76) [39] • Jacchia-‐Roberts (J71, J77, GRAM-‐99) [39]
• Cospar International Reference Atmosphere (CIRA90) [39] • Mass Spectrometer Incoherent Scatter (NRLMSIS-‐90) [39]
Modelli come quello di Jacchia-‐Roberts, sono tempo-‐varianti e per implementarli richiedono requisiti computazionali elevati, perché è molto difficile predire l’attività solare e quindi il valore della densità a diverse quote. Altri modelli invece forniscono descrizioni statiche dell’atmosfera, cioè la densità cambia solo in funzione dell’altitudine.
In quest’analisi preliminare le missioni non sono vincolate in termini di inizio o di durata, quindi verranno considerati modelli di densità statico. Sono stati considerati due tipi di modelli atmosferici:
Modello esponenziale
Il modello esponenziale consiste nell’approssimare la variazione di ρ con la quota mediante una legge esponenziale del tipo [17]:
𝜌 = 𝜌!exp −ℎ − ℎ!
𝐻!"#$%& (43)
dove h è la quota effettiva del satellite, ℎ! è una quota di riferimento e 𝐻!"#$%& è un fattore di scala.
Standard Atmosphere (1976 U.S.)
È un modello che definisce i valori per la temperatura, la densità, la pressione e altre proprietà per un ampio intervallo di altitudini. Questo è il più recente fra quelli sviluppati; in Fig. 36 è mostrato l’andamento della densità in funzione dell’altitudine.
Figura 36 -‐ Andamenti della densità in funzione dell'altitudine. L’andamento in blu è relativo al modello esponenziale, l’andamento in rosso è relativo al
In quest’analisi verrà utilizzato solo un modello, lo Standard Atmosphere (più cautelativo).
3.9 Stima del tempo di deorbitamento degli SL–8, SL–3 e SL–14
In questo paragrafo sono presentati i tempi di deorbitamento, naturale e non, dei tre tipi di oggetti scelti, mostrando l’andamento dell’altitudine in funzione del tempo trascorso. Per effettuare queste simulazioni è stato creato un codice in ambiente Matlab® (Cap. 4)
utilizzando l’Eq. 20.
SL – 8
Questi detriti hanno un rapporto area-‐massa pari a 0,007 𝑚!/𝑘𝑔 e si trovano ad altitudini comprese fra 675 km e 800 km, ma per questo tipo di simulazioni si utilizza, per semplicità, un’altitudine media di 760 km, in modo da avere una stima sul tempo di deorbitamento.
Figura 37 -‐ Deorbitamento naturale degli SL-‐8
In Fig. 37 il detrito raggiunge un’altitudine di 150 km in un tempo pari a 166,77 anni, ben oltre i tempi tollerabili.
Se si considera invece il detrito schiumato, la situazione cambia radicalmente. In basso sono schematizzati i risultati di tre simulazioni fatte variando la quantità di schiuma ed utilizzando una schiuma con densità pari a 0,2 𝑘𝑔/𝑚!.
Prima simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 100 4,92 0,04 23,60
Tabella 3 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla prima simulazione degli SL-‐8
Figura 38 -‐ Deorbitamento SL-‐8 utilizzando 100 kg di schiuma
Seconda simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 200 6,20 0,07 15,83
Tabella 4 -‐ Parametri della sfera di schiuma e del tempo di deorbitamento relativi alla seconda simulazione degli SL-‐8
Figura 39 -‐ Deorbitamento SL-‐8 utilizzando 200 kg di schiuma.
Terza simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 300 7,10 0,09 12,82
Tabella 5 -‐ Parametri della sfera di schiuma e del tempo di deorbitamento relativi alla terza simulazione degli SL-‐8
Figura 40 -‐ Deorbitamento SL-‐8 utilizzando 300 kg di schiuma.
Dai grafici si nota che il detrito schiumato utilizzando una massa di 300 kg deorbita più velocemente, rappresentando un vantaggio rispetto agli altri due casi; lo svantaggio principale di questo caso è avere una sfera di dimensioni maggiori, e quindi una probabilità di collisione con altri
detriti maggiore. Al di sotto di circa 90 kg di schiuma , i tempi di deorbitamento risultano maggiori di 25 anni, come mostrato in Fig. 41. poiché le linee guida IADC [26] richiedono che il detrito rientri entro questo tempo, tali masse non sono state prese in considerazione.
Figura 41 -‐ Deorbitamento SL-‐8 con 90 kg di schiuma.
SL – 3
Questi detriti si trovano a un’altitudine relativamente bassa, compresa fra 425 km e 600 km, quindi il loro tempo di deorbitamento naturale non è elevato come quello degli SL-‐8. Considerando un’altitudine media
di circa 550 km si stima che il detrito cada entro circa 10 anni, come è mostrato in Fig. 42.
Figura 42 -‐ Deorbitamento naturale SL-‐3
Nonostante i tempi di deorbitamento siano intorno ai 10 anni, sono state effettuate lo stesso delle simulazioni con tre valori di massa di schiuma. Chiaramente, considerando la loro quota, non sono necessari valori elevati di massa per questo tipo di detriti; infatti, si considerano valori di 20, 50 e 100 kg.
Prima simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 20 2,87 0,01 3,02
Tabella 6 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla prima simulazione degli SL-‐3
Figura 43 – Deorbitamento SL-‐3 con 20 kg di schiuma
Seconda simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 50 3,9 0,03 1,65
Tabella 7 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla seconda simulazione degli SL-‐3
Figura 44 -‐ Deorbitamento SL-‐3 con 50 kg di schiuma
Terza simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 100 4,92 0,04 1,07
Tabella 8 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla terza simulazione degli SL-‐3
Figura 45 -‐ Deorbitamento SL-‐3 con 100 kg di schiuma
Anche considerando il caso peggiore in cui si utilizza una massa di 20 kg, il detrito deorbita in un tempo di circa 3 anni.
SL – 14
La maggior parte di questi detriti si trovano in una fascia di altitudini comprese fra 600 km e 650 km. Utilizzando un’altitudine media di 620 km è stato possibile calcolare il tempo di deorbitamento naturale di questi oggetti ottenendo un risultato di 49,03 anni.
Figura 46 -‐ Deorbitamento naturale SL-‐14
Poiché il tempo di deorbitamento non è elevato come quello degli SL – 8, anche per gli SL-‐14 si effettuano tre simulazioni utilizzando valori di massa di schiuma pari a 20, 50 e 100 kg.
Prima simulazione Massa della schiuma (kg) Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 20 2,87 0,01 9,19
Tabella 9 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla prima simulazione degli SL-‐14
Figura 47 -‐ Deorbitamento SL-‐14 con 20 kg di schiuma
Seconda simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 50 3,9 0,03 5,02
Tabella 10 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla seconda simulazione degli SL-‐14
Figura 48 -‐ Deorbitamento SL-‐14 con 50 kg di schiuma
Terza simulazione
Massa della schiuma (kg)
Raggio ottimale della sfera di schiuma (m) Rapporto A/m (m^2/kg) Tempo di deorbitamento (Anni) 100 4,92 0,04 3,27
Tabella 11 -‐ Parametri della sfera di schiuma e tempo di deorbitamento relativi alla terza simulazione degli SL-‐14
Figura 49 -‐ Deorbitamento SL-‐14 con 100 kg di schiuma
Essendo a un’altitudine superiore a quella degli SL-‐3, utilizzando una massa di schiuma di 20 kg, gli SL-‐14 deorbitano in un tempo pari a circa 9 anni.
![Figura
21
-‐
Distribuzione
orbitale
degli
stadi
attorno
alla
Terra
[34]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570540.111520/16.892.159.687.340.663/figura-distribuzione-orbitale-stadi-attorno-terra.webp)
![Figura
22
-‐
Distribuzione
orbitale
degli
stadi
in
LEO[34]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570540.111520/17.892.198.733.244.578/figura-distribuzione-orbitale-stadi-leo.webp)
![Figura
24
-‐
Contributo
degli
stadi
in
LEO
per
paese[34]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570540.111520/18.892.157.695.840.1027/figura-contributo-stadi-leo-paese.webp)
![Figura
26
-‐
Distribuzione
di
stadi
e
satelliti
ad
alta
priorità
di
rimozione.
I
500
oggetti
ritenuti
ad
elevata
pericolosità
sono
contrassegnati
in
verde[34]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570540.111520/21.892.196.734.248.578/figura-distribuzione-satelliti-priorità-rimozione-ritenuti-pericolosità-contrassegnati.webp)
![Tabella
2
-‐
Caratteristiche
fisiche
degli
SL-‐8,
SL-‐3
e
SL-‐14[38]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570540.111520/22.892.139.717.266.427/tabella-caratteristiche-fisiche-sl-sl-sl.webp)