Biorobotic solutions to reduce the risk of
falling in balance-impaired subjects
Federica Aprigliano
Academic Year 2016/2017
PhD Course in BioRobotics
PhD Course in
BioRobotics
Academic Year
2016/2017
Biorobotic solutions to reduce the
risk of falling in balance-impaired
subjects
Federica Aprigliano
Supervisor:
Prof. Silvestro Micera
Tutor:
Dr. Vito Monaco
Co-Tutor:
Abstract
This thesis was aimed at developing innovative technological solutions to reduce the risks of falling and their related injuries in balance-impaired subjects. The first step was to investigate the balance recovery response after unexpected perturbations of walking delivered by two purposely-designed robotic platforms. Consequently, a perturbation-based training and an assistive strategy were tested in individuals characterized by high risk of falling (i.e. elderly subjects, transfemoral amputees and patients with cerebellar ataxia) in order to improve their stability after sudden loss of balance and to avoid falling. In Chapter 2 and 3, the lower limb intersegmental coordination of healthy young and elderly subjects was investigated during their recovery responses after slip-like perturbations of walking delivered by the SENLY platform. Results show that such coordination strategy is shared across young and elderly people, denoting that they relied on the same motor schemes during different motor tasks (i.e. steady walking and multi-directional slip-like perturbations of increasing intensity), although ageing, per se, significantly affects the corrective response of older adults. Current evidences suggested that these fast and stereotyped motor schemes result from the interaction among activities of downstream neural networks, thus providing further neurophysiological support to investigate the effects of a perturbation-based paradigm to rehabilitate walking capabilities in patients with balance disorders.
Accordingly, in Chapter 4, effects of repeated waist-pull perturbations on gait stability were investigated in subjects with cerebellar ataxia by using the Active-Tethered Pelvic Assist Device. Results showed that patients were able to make fast and appropriate adjustments according to the directions and the amplitudes of the perturbations, and they improved their gait baseline after a single session of the proposed perturbation-based training. The strength of the current pilot study was to introduce a novel approach to improve cerebellar ataxia from the perspective of rehabilitation of gait and balance, for which few effective therapies exist. Further studies of a larger sample size are needed to generalize and translate these evidences into a clinical environment.
Finally, in Chapter 5, a real-time fall detection and mitigation strategy was implemented in the control unit of the Active Pelvis Orthosis (APO), and was tested on elderly subjects and transfemoral amputees. Specifically, the lack of balance was detected in real time by a threshold-based algorithm comparing the actual kinematics of the robot with that predicted by a pool of adaptive oscillators. Then, an assistive strategy was
delivered by applying torques at hip levels, providing effective countermeasures to regain stability after a slippage. Findings reported in this thesis demonstrated the potential of the light-weighted APO to assist subjects with high risks of falling during slipping events, thus potentially improving their quality of life. Future studies are required for a more focused design to further reduce the bulkiness of wearable robotic platforms and increase usability and acceptance by senior and disabled users.
Overall, the proposed approaches are promising to effectively reduce the risks of falling and their related injuries in subjects with balance disorders. Future works will be conducted to extend the proposed methodologies to individuals with higher risks of falling (i.e. fragile elderly subjects) and people with neurological disorders (e.g. post-stroke and Parkinson’s disease). In addition, present results will be generalized to other cause of falling (e.g. tripping and obstacle avoidance) and to the activities of daily living that involved sudden postural transitions (e.g. turning and gait initiation/termination).
Acknowledgments
Firstly, I would like to express my sincere gratitude to my Supervisor Prof. Silvestro Micera and my Tutor Dr. Vito Monaco for their guidance and continuous support during my PhD study and related research. I am also deeply grateful to my Co-Tutor Prof. Nicola Vitiello. Without their precious advices and scientific approach, it would have not been possible to conduct this research.
I wish to express my thanks to all my colleagues at The BioRobotics Institute for the nice time spent together. A special thanks goes to Ettore, Dario and Peppino for sharing expertise and for their feedback, cooperation and of course friendship.
I would like to extend my sincerest thanks to Prof. Sunil Agrawal, who provided me the opportunity to join his team during my period abroad at the Columbia University, and to Jieyon for her friendly advice during this research period in New York.
Most importantly, I would like to dedicate this thesis to my family: thanks to my parents, Aurora and Tommaso for supporting me through the past few years.
The work described in Chapter 2 has been developed in collaboration with Dr. Dario Martelli, Prof. Silvestro Micera and Dr. Vito Monaco from The BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy. The results have been published as research article in Journal of Neurophysiology.
The work described in Chapter 3 has been developed in collaboration with Dr. Dario Martelli, Dr. Peppino Tropea, Prof. Silvestro Micera and Dr. Vito Monaco from The BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy, and Mr. Guido Pasquini from Don Carlo Gnocchi Foundation, Florence, Italy. The results have been submitted as research article.
The work described in Chapter 4 has been developed in collaboration with Dr. Dario Martelli, Eng. Jiyeon Kang and Prof. Sunil K. Agrawal from the Department of Mechanical and Rehabilitation Medicine, Columbia University, New York, NY, USA, Dr. Un J. Kang and Dr. Sheng-Han Kuo from the Department of Neurology, Columbia University Medical Center, New York, NY, USA, and Prof. Silvestro Micera and Dr. Vito Monaco from The BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy. The results have been submitted as research article.
The work described in Chapter 5 has been developed in collaboration with Dr. Vito Monaco, Dr. Peppino Tropea, Dr. Dario Martelli, Eng. Andrea Parri, Dr. Mario Cortese, Prof. Nicola Vitiello and Prof. Silvestro Micera from The BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy, and Dr. Raffaele Molino-Lova from Don Carlo Gnocchi Foundation, Florence, Italy. The results have been published as research article in Scientific Reports - Nature.
Contents
LIST OF FIGURES AND TABLES 10
PUBLICATIONS 11
JOURNAL PAPERS 11
PEER REVIEWED CONFERENCES PROCEEDINGS 12
ABSTRACT AT CONFERENCE 12
1
INTRODUCTION 14
1.1
RISK OF FALLING AND ITS RELATED CONSEQUENCES 14
1.2
AIMS AND OVERVIEW OF THE THESIS 15
2
INTRALIMB COORDINATION DURING MULTI-DIRECTIONAL SLIP-LIKE PERTURBATIONS 19
2.1
INTRODUCTION 19
2.2
AIMS 21
2.3
MATERIALS AND METHODS 22
2.3.1
PARTICIPANTS, EXPERIMENTAL SETUP AND PROTOCOL 22
2.3.2
DATA PRE-PROCESSING 24
2.3.3
DATA ANALYSIS 25
2.3.4
PRINCIPAL COMPONENT ANALYSIS (PCA) 26
2.3.5
STATISTICAL ANALYSIS 27
2.4
RESULTS 27
2.4.1
SPATIO-TEMPORAL PARAMETERS 27
2.4.2
JOINT ANGLES 29
2.4.3
ELEVATION ANGLES 32
2.4.4
COVARIATION OF KINEMATIC VARIABLES 34
2.5
DISCUSSION 37
2.5.1
CONSISTENCE OF THE PLANAR COVARIATION LAW 38
2.5.2
CORRECTIVE RESPONSES OF THE UNPERTURBED LIMB 41
2.6
CONCLUSIONS 42
3
AGEING EFFECTS ON INTRALIMB COORDINATION DURING SLIP-LIKE
PERTURBATIONS OF INCREASING INTENSITIES 44
3.1
INTRODUCTION 44
3.2
AIMS 45
3.3
MATERIALS AND METHODS 45
3.3.1
SUBJECTS, EXPERIMENTAL SETUP, AND PROTOCOL 45
3.3.2
DATA PROCESSING 48
3.3.3
INTRALIMB COORDINATION 49
3.3.4
STATISTICAL ANALYSIS 50
3.4
RESULTS 51
3.4.1
SPATIO-TEMPORAL PARAMETERS 51
3.4.2
ELEVATION ANGLES 53
3.4.3
INTERSEGMENTAL COORDINATION 56
3.5
DISCUSSION 58
3.5.1
EFFECTS OF INTENSITY OF THE PERTURBATION ON INTRALIMB COORDINATION 59
3.5.2
EFFECTS OF AGEING ON THE INTRALIMB COORDINATION 61
3.6
CONCLUSIONS 62
4
EFFECTS OF REPEATED WAIST-PULL PERTURBATIONS ON GAIT STABILITY IN SUBJECTS WITH CEREBELLAR ATAXIA 64
4.1
INTRODUCTION 64
4.2
AIMS 65
4.3
MATERIAL AND METHODS 66
4.3.1
PARTICIPANTS 66
4.3.2
EXPERIMENTAL SETUP AND PROTOCOL 67
4.3.3
DATA ANALYSIS 69
4.3.4
STATISTICAL ANALYSIS 70
4.4
RESULTS 70
4.4.1
TRAINING AND TEST SESSIONS 70
4.4.2
UNPERTURBED WALKING 74
4.5
DISCUSSION 75
4.6
CONCLUSIONS 75
5
AN ECOLOGICALLY-CONTROLLED EXOSKELETON CAN IMPROVE BALANCE RECOVERY AFTER SLIP-LIKE PERTURBATIONS 77
5.1
INTRODUCTION 77
5.2
AIMS 78
5.3
MATERIALS AND METHODS 79
5.3.1
PARTICIPANTS AND EXPERIMENTAL SETUP 79
5.3.2
FALL DETECTION ALGORITHM 81
5.3.3
ASSISTIVE STRATEGY 82
5.3.4
DATA COLLECTION AND PROCESSING 83
5.3.5
ANALYSIS OF THE STABILITY AGAINST BALANCE LOSS 85
5.3.6
STATISTICAL ANALYSIS 85
5.4
RESULTS 86
5.4.1
ANALYSIS OF THE BIOMECHANICAL RESPONSE DURING BALANCE RECOVERY 86
5.4.2
STABILITY AGAINST BALANCE LOSS: EFFECTS OF THE PROPOSED APPROACH 88
5.4.3
ANALYSIS OF THE OBTRUSIVENESS OF THE APO 91
5.5
DISCUSSION 91
5.6
CONCLUSION 92
CONCLUSIONS AND FUTURE STUDIES 93
REFERENCES 97
List of Figures and Tables
FIGURE 1.1: THE SENLY PLATFORM ... 16
FIGURE 1.2: THE ACTIVE TETHERED PELVIC ASSIST DEVICE (A-TPAD) ... 17
FIGURE 2.1: EXPERIMENTAL PROTOCOL. ... 23
FIGURE 2.2: TEMPORAL PARAMETERS OF HEALTHY YOUNG SUBJECTS ... 28
FIGURE 2.3: JOINT ANGLES ... 30
TABLE 2.1: 3-WAY ANOVA ON JOINT ANGLES ... 31
FIGURE 2.4: ELEVATION ANGLES ... 33
TABLE 2.2: 3-WAY ANOVA ON ELEVATION ANGLES ... 34
FIGURE 2.5: CUMULATIVE EXPLAINED VARIANCE OF PRINCIPAL COMPONENTS ... 35
FIGURE 2.6: PLANAR COVARIATION LAW ... 36
FIGURE 2.7: POST-HOC ANALYSIS ON ELEVATION ANGLES ... 40
TABLE 3.1: HEALTHY SUBJECTS’ CHARACTERISTICS ... 46
FIGURE 3.1: BELTS’ VELOCITY PROFILE ... 47
FIGURE 3.2: SPATIO-TEMPORAL PARAMETERS ... 52
TABLE 3.2: 2-WAY ANOVA ON SPATIO-TEMPORAL PARAMETERS ... 53
FIGURE 3.3: ELEVATION ANGLES ... 54
TABLE 3.3: 2-WAY ANOVA ON ELEVATION ANGLES ... 56
FIGURE 3.4: PLANAR COVARIATION LAW ... 57
TABLE 3.4: 2-WAY ANOVA ON CUMULATIVE EXPLAINED VARIANCE ... 58
TABLE 4.1: CEREBELLAR ATAXIA SUBJECTS’ CHARACTERISTICS ... 66
FIGURE 4.1: EXPERIMENTAL SETUP AND PROTOCOL ... 67
FIGURE 4.2: DYNAMIC STABILITY DURING THE TRAINING SESSION ... 71
FIGURE 4.3: DYNAMIC STABILITY DURING TEST SESSION ... 73
FIGURE 4.4: DYNAMIC STABILITY DURING WALKING TRIAL ... 74
FIGURE 5.1: CONTROL STRATEGY ... 79
TABLE 5.1: SUBJECTS’ CHARACTERISTICS. ... 80
FIGURE 5.2: REAL TIME DETECTION OF SLIP-LIKE PERTURBATIONS ... 87
FIGURE 5.3: KINEMATIC PATTERNS AT LEG JOINTS ... 88
Publications
Journal papers
Monaco V, Tropea P, Aprigliano F, Martelli D, Parri A, Cortese M, Molino-Lova R, Vitiello N, and Micera S. An ecologically-controlled exoskeleton can improve balance recovery after slippage. Scientific Reports 7, 46721; doi: 10.1038/srep46721, 2017.
Martelli D, Aprigliano F, Tropea P, Pasquini G, Micera S, and Monaco V. Stability against backward balance loss: Age-related modifications following slip-like perturbations of multiple amplitudes. Gait & posture 53: 207-214, 2017.
Aprigliano F, Martelli D, Micera S, and Monaco V. Intersegmental coordination elicited by unexpected multidirectional slipping-like perturbations resembles that adopted during steady locomotion. Journal of neurophysiology 115: 728-740, 2016.
Tropea P, Vitiello N, Martelli D, Aprigliano F, Micera S, and Monaco V. Detecting slipping-like perturbations by using adaptive oscillators. Annals of Biomedical Enginnering 43 (2):416-26, 2015.
Aprigliano F, Martelli D, Tropea P, Pasquini G, Micera S, and Monaco V. Ageing does not affect the intralimb coordination elicited by slip-like perturbations of different intensities. Under review on Journal of neurophysiology
Aprigliano F, Martelli D, Kang J, Kuo SH, Kang UJ, Monaco V, Micera S, and Agrawal S. Effects of repeated waist-pull perturbations on gait stability in subjects with cerebellar ataxia. Submitted
Martelli D, Kang J, Aprigliano F, Staudinger U, and Agrawal S. Single-session perturbation-based balance training improves gait stability and cognitive performance in healthy older adults. Submitted
Peer Reviewed Conferences Proceedings
Aprigliano F, Martelli D, Tropea P, Micera S, and Monaco V. “Effects of slipping-like perturbation intensity on the dynamical stability”, in International Conference of the IEEE Engineering in Medicine and Biology Society (IEEE EMBC) 2015, August 25th - 29th 2015, Milano, Italy.
Tropea P, Martelli D, Aprigliano F, Micera S, and Monaco V. “Effects of aging and perturbation intensities on temporal parameters during slipping-like perturbations”, in International Conference of the IEEE Engineering in Medicine and Biology Society (IEEE EMBC) 2015, August 25th - 29th 2015, Milano, Italy.
Abstract at Conference
Aprigliano F, Martelli D, Monaco V, and Micera S. “Kinematics determinants during unperturbed and perturbed walking”, in Gruppo Nazionale Bioingegneria (GNB) 2014, June 25th - 27th 2014, Pavia, Italy.
1 Introduction
1.1 Risk of falling and its related consequences
Falls are universally acknowledged as one of the most disabling conditions affecting health and quality of life of the population; specifically, falls are a serious cause of problems in elderly people, amputees, and subjects with movement disorders. Recent studies have reported: (i) about one in three elderly subjects (aged 65 and older) experience an unintentional fall per year (Masud and Morris 2001; Mellone et al. 2012); (ii) a fall prevalence (52.4%) and a fear of falling (49.2%) among a population of unilateral amputees (Miller et al. 2001); (iii) 84% of degenerative ataxia patients fell at least once over a 1-year period with traumatic consequences (Stolze et al.). Falls are a cause of substantial rates of morbidities, mortalities as well as mayor contributors to functional deterioration, and premature nursing home placement and hospitalization. In addition, fear of falling and related loss of confidence often lead to reduction in physical function and social interactions, thus impairing muscle strength, agility, balance control and, further increasing the risk of fall (Ambrose et al. 2013; Laird et al. 2001; Rubenstein 2006; Yardley and Smith 2002). Accordingly, both the increasing life expectancy and the severity of traumatic consequences of falls evidently prove that falling is a significant problem in terms of the global population health and costs for the health care system.
For these reasons, fall biomechanics has been widely investigated in the last decades (Cham and Redfern 2001; Ferber et al. 2002; Marigold and Patla 2002; Redfern et al. 2001; You et al. 2001). Many research groups agree on the fact that, from the biomechanical viewpoint, a fall is an intrinsically complex motor task because, although it is somehow possible to classify different modes of falling, during daily activities it is extremely difficult to observe two comparable falls. As a matter of fact, the variability of falling depends on both the perturbation itself (e.g. type, direction and intensity), and the cognitive and physical status of the person experiencing it. Accordingly, falls have been usually studied and classified in a standardized framework, in order to capture the main features of such occurrence. In particular, in literature (Bakken, 2002) three main accidental causes of falling are identified: slipping, tripping and missteps. Among those, slipping and tripping involve the greater amount of accidents (Berg et al., 1997, Oneill et al., 1994) and the former occurrence has been shown to account for approximately the 62% of the underfoot accidents (Burnfield and Powers, 2006).
Overall, suitable technological solutions are hence required to reduce the risks of falling and their related injuries. Accordingly, several effective interventions have been investigated in recent years, to improve the health and independence of balance-impaired subjects by reducing the number of falls. Existing approaches are based on the following items:
- Wearable fall detection and activity monitoring systems. They include sensors for the timely detection of falls, pervasive applications for triggering alarms and for understanding and monitoring the status of the users. They are relatively well known and accepted by care providers. The main limitations and reasons for rejection by end-users are that: (i) they are intrinsically late (an alarm is raised when the fall has happened); (ii) limited results on accuracy in a real-world environment are available (too many false positives are detected).
- Support of lower limb joints, both active (e.g. powered orthosis and exoskeletons) and passive (e.g. ankle-foot or knee-ankle-foot orthosis). The main drawbacks are, respectively, the bulkiness and power consumptions, and an unnatural limitation of the joints range of motion.
- Balance and gait training (e.g. modified treadmills and balance platforms including low-cost game platforms). The rationale undergoing this approach is that these exercise interventions can lead significant improvements in several functional capabilities such as balance and strength, which contribute to reduce fall risk and fall incidence rate (Reinsch et al. 1992). The main limitation is that they can only provide “indirect” prevention.
Although promising, the performance of thus far proposed approaches are not satisfying as expected; therefore, innovative methods and systems have to be developed to reduce the incidence of falling and its consequences, since they impact health, quality of life and life expectancy of the population, as well as social and economic costs for community and societies.
1.2 Aims and overview of the thesis
This thesis was aimed at developing innovative solutions to reduce the risk of falling in balance-impaired subjects. In order to achieve this goal, it was important to deeply investigate how people react to unexpected perturbations delivered during steady
locomotion by using purposely-designed robotic platforms. Then, suitable preventing or assistive strategies were developed to improve balance after sudden disturbances during walking-related motor tasks.
The following studies involved the analysis of subjects’ behavior while experiencing unexpected walking disturbances delivered by two robotic platforms: (1) the SENLY platform provided slip-like perturbations at the level of the Base of Support (Bassi Luciani et al. 2012); (2) the Active Tethered Pelvic Assist Device (A-TPAD) applied waist-pull perturbations at the level of the Centre of Mass (CoM) (Martelli et al. 2015; Vashista et al. 2015).
SENLY (Figure 1.1) is a mechatronic platform mainly consisting of a two split-belt treadmill whose belts can be independently moved both longitudinally and transversally (i.e. the right belt can be moved in all clockwise directions from north to south, and the left belt can be moved in all directions in the remaining hemiplane). In this way, it was possible to provide slip-like perturbations toward all directions in the horizontal plane by applying sudden movements of one or both belts. SENLY is also provided with force sensors, which were used to estimate the ground reaction forces in order to trigger the perturbation according to the identification of gait events (i.e. heel strike and toe off).
The A-TPAD (Figure 1.2) is a cable-driven robot used to apply unexpected force-controlled multidirectional waist-pull perturbations while subjects walk on a treadmill. Cables are attached to a hip brace worn by the subject and routed using pulleys to be diagonally-directed. Waist-pull perturbations were provided imposing suitable cable tension values at each motor such that a resultant force was applied to the pelvis along the desired direction.
Figure 1.2: The Active Tethered Pelvic Assist Device (A-TPAD)
Overall, the design of both these robotic platforms provides flexibility to rapidly modify the direction, the amplitude, the duration, the trigger time point, and the waveform of the perturbation. Specifically, these platforms are able to generate ecological “controlled” falls in secure experimental setting, thus different disturbances can be reproduced by applying standardized and repeatable perturbations in order to study biomechanical behaviors while subjects are counteracting the loss of balance. In addition, the mentioned platforms were used (i) as training device to improve balance by exposing subjects to repeated unexpected perturbations; (ii) to develop and test technical solutions for improving balance recovery, thus reducing the risk of falling.
In Chapters 2 and 3 the kinematics of the corrective reactions in response to unexpected multi-directional slip-like perturbations, provided by the SENLY platform, are described. These chapters are mainly focused in increasing current understanding of the motor control mechanisms during balance recovery responses elicited by unpredictable disturbances in healthy young subjects (Chapter 2) and elderly people (Chapter 3). Specifically, attention is given to the lower limb coordination used during different and unstable motor tasks (i.e. steady walking and unexpected perturbations).
Chapter 4 are focused on investigating (i) the corrective response of subjects with cerebellar ataxia after unexpected repeated waist-pull perturbations delivered during steady walking by the A-TPAD, and (ii) whether the proposed perturbation-based training would improve the dynamic stability of enrolled patients and reduce their risk of falling. The main assumption is that the cerebellum do not seem to be essential for managing unexpected disturbances, thus subjects with cerebellar ataxia could benefit from the perturbation-based approach according to their retained ability to learn from an intensive rehabilitation treatment.
In Chapter 5, attention is given to the development of a suitable technological solution to improve balance recovery in elderly subjects and trans-femoral amputees. The main idea is to detect the incipient fall and implement suitable strategies to help subjects regaining stability after a loss of balance in order to prevent fall-related injuries. This goal is reached by: (i) developing and implementing an effective method to detect falling events; (ii) using a wearable system to detect the loss of balance and, in case, provide the required amount of “extra-strength” to the user in order to make the balance recovery response more effective. In particular, a corrective countermeasure is rapidly provided by the Active Pelvis Orthosis (APO) to make the balance recovery response successful.
2 Intralimb coordination during multi-directional
slip-like perturbations
2.1 Introduction
Human biomechanics during locomotion related motor tasks (e.g. walking, running, turning) is the result of the well-coordinated control of a multi-segmental chain actuated by many redundant muscle groups (Dietz 2002; Herr and Popovic 2008; Hinrichs 1990; Ivanenko et al. 2006). The system is further complicated by the fact that the bipedal erect posture continuously challenges the balance since it is inherently unstable (Winter 1995). In addition, due to the anisotropy of both compliance and inertia of the musculo-skeletal-system, the balance control in the sagittal and the frontal planes involves different biomechanical demands (Kuo 1999; Martelli et al. 2013), revealing a complex strategy underlying the dynamic equilibrium.
To understand how the Central Nervous System (CNS) addresses the intersegmental coordination during voluntary and lower limb-related motor tasks, many research groups have investigated the hypothesis that the kinematics across several body segments can be described by global variables having fewer degrees of freedom than those actually available. In particular, it has been widely documented that the pendulum-like oscillations of lower limb segments covary despite the fact that leg joint angles can be significantly altered by both motor tasks being achieved (Borghese et al. 1996; Cappellini et al. 2010; Courtine and Schieppati 2004; Grasso et al. 1998; Ivanenko et al. 2007; Noble and Prentice 2008), and neuromuscular adaptations due to ageing or pathologies (Bleyenheuft and Detrembleur 2012; Leurs et al. 2012; Noble and Prentice 2008). Noticeably, this planar covariation law of intersegmental coordination provides a good prediction of the task being achieved (Ivanenko et al. 2007), revealing that a wide range of motor tasks can be controlled by mainly acting on the temporal synchronization of the elevation angles (Barliya et al. 2009; Courtine and Schieppati 2004; Ivanenko et al. 2007; Noble and Prentice 2008).
The existence of a covariation law linking the timely oscillations of lower limb segments in humans led previous authors to conjecture a hierarchic organization of motor control whose primary goal consists in leading limb axis length and limb orientation separately (Ivanenko et al. 2007; Lacquaniti et al. 2002). As a corollary, the coordinated distribution of forces and torques across joints, as well as the synergistic activity of
recruited muscles, would be the result of a subordinate consequence of this covariation law (Lacquaniti et al. 1999) involving a twofold advantage: on one hand, the number of degrees of freedom required to guarantee dynamical balance is only limited to the angular elevation of limb segments; on the other hand, even if the CNS integrated all kinematic and kinetic variables to control torque patterns, muscle activity or Center Of Mass (COM) trajectories, the coupled (i.e. correlated) kinematics across limb segments would reduce the overall computational cost.
It is worth noting that the relationship between the intersegmental coordination and the control of locomotion also arose in a recent study dealing with the identification of characteristic variables contributing to walking control (Funato et al. 2015). In particular, the authors observed that although walking under external disturbances involves fluctuations for several kinematic variables related to sensory feedback and balance control (e.g. intersegmental coordination, head and COM motion), the fluctuations of the intersegmental coordination are comparatively smaller than those concerning other variables. The small inherent variability of the intersegmental coordination to external perturbations was hence supposed to reflect the action of the CNS, suggesting a possible relationship between intersegmental coordination and control of locomotion (Funato et al. 2015).
It is important to pinpoint that the intersegmental covariation law has been documented as a strategy shared among several voluntary motor tasks: it has been observed during both unperturbed walking and running in a wide range of speeds, and when these tasks are altered by the introduction of a known, context-dependent and constant perturbation of the natural gait (e.g. turning, knee or trunk bent, forward vs. backward, slipping surfaces, in-place motor tasks, knee-locked marching and “non-steady-state” loop conditions). These experimental paradigms raise the hypothesis that the covariation law underlying intersegmental coordination is the result of over-trained motor schemes in conjunction with planned adaptive movements relying on supraspinal inputs. As counterproof, the planar covariation law is violated in toddlers at the onset of independent walking, and when stooping and grasping an object on the floor (Cheron et al. 2001; Ivanenko et al. 2005a; Ivanenko et al. 2008; Ivanenko et al. 2005b), that is, when motor skills are not fully developed (e.g. first independent steps of toddlers), or when the superimposed motor task (e.g. stooping and grasping an object on the floor) requires abrupt modifications of the kinematic coordination of intralimb segments. In this respect, the tuning of the intersegmental coordination law is supposed to be the result of the interaction between the Central Pattern Generator (CPG) and other neural networks
involved in locomotion control in order to maintain dynamic equilibrium during the unperturbed gait cycle and to lead anticipatory adaptations to potentially destabilizing factors (Lacquaniti et al. 1999).
From the best of my knowledge, the planar covariation law has never been investigated during corrective reactions elicited by sudden and unexpected perturbations delivered during steady locomotion. Actually, previous authors have argued that reactive countermeasures are characterized by stereotyped motor schemes presumably led by automated control strategies encrypted in neural circuits located in the spinal cord (Dietz 2002; Marigold and Misiaszek 2009; Misiaszek 2006). As a matter of fact, since reactive strategies must occur shortly after the onset of the perturbation (e.g. 70-100 ms), they cannot rely on supraspinal inputs to be planned and enabled. Accordingly, they are thought to be mediated at the spinal level by neural networks, which can be flexibly interconnected (Ferber et al. 2002; Oates et al. 2005; Tang et al. 1998). In addition, reactive countermeasures take advantage of the multi-segments chain constituting the human body and may be driven by common nervous structures as those underlying unperturbed locomotion (Chvatal and Ting 2012; Martelli et al. 2013). Despite this, it is not clear whether the planar covariation law is altered during reactive biomechanical responses.
2.2 Aims
This study was aimed at investigating the effects of multi-directional slip-like perturbations of locomotion on the intersegmental coordination strategy described by the planar covariation law. In particular, the hypothesis was that multi-directional slip-like perturbations could significantly alter the intersegmental coordination related to the perturbed limb (PL). Despite this, the reactive biomechanical response elicited in the contralateral limb, i.e. the unperturbed limb (UL), would be characterized by an intersegmental coordination strategy most likely resembling that adopted during steady locomotion. The different hypothesis concerning the behavior of PL and UL is supported by previous studies documenting that, during unexpected slip-like perturbations, the former limb is usually forced to move according to the kinematics of the perturbation while the reactive response elicited in the latter one aims at maintaining the dynamical stability (Marigold et al. 2003; Marigold and Patla 2002). With respect to this study, if the intralimb coordination strategy of the UL resulted in accordance with the planar covariation law, it would corroborate the idea that this coordination strategy has a
functional significance for the control of the dynamical equilibrium during voluntary motor tasks as well as reactive motor responses, and would further support the hypothesis that it has neural origin. In addition, it would also suggest that this intralimb coordination pattern could be elicited by unexpected disturbances of the dynamical balance due to slip-like perturbations.
2.3 Materials and Methods
Data used in this study were collected as part of an independent work (Martelli et al. 2013). Accordingly, only a brief summary of procedures and setup will be reported in the next sections.
2.3.1 Participants, experimental setup and protocol
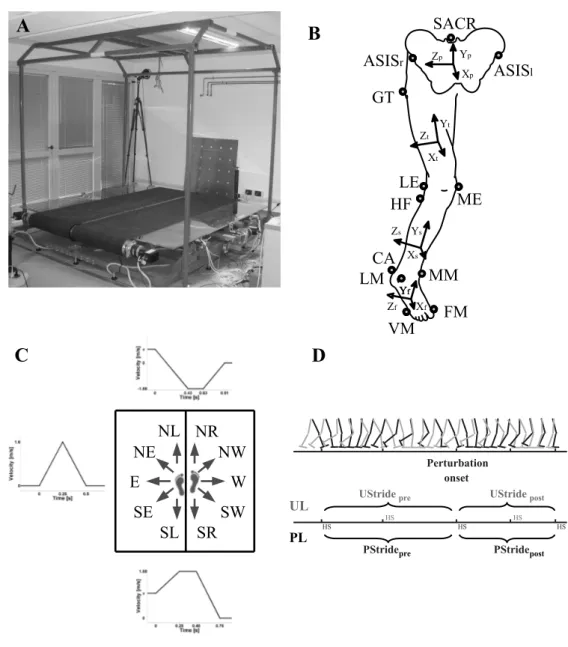
Fifteen healthy young subjects (ten males and five females, 26.1 ± 1.3 years old, 68.8 ± 12.3 kg, 1.78 ± 0.06 m, right dominance of the lower limbs (Ballermann et al. 2006)) were enrolled after providing informed consent. Subjects were asked to manage unexpected slip-like perturbations delivered while they were walking steadily at normalized speed, according to a Froude number equal to 0.15. Perturbations were delivered by the SENLY platform (Figures 1.1 and 2.1A).
A
B
C
ASISl HF ME LE SACR GT ASISr MM FM VM Xf CA LM NR NL NW SW W NE SE E SL SR Yf Zf Yf Ys Xs Zs Yf Yt Xt Zt Yp Xp ZpD
Perturbation onset UStridepre HS HS HS UL HS HS PL PStridepre UStridepost PStridepostFigure 2.1: Experimental protocol.
(A) The SENLY platform. (B) Lower limb marker set. Markers were attached bilaterally (figure only shows those on the right side of the lower limb to make reading easier) and were
labeled as follows: SACR, sacrum; GT, great trochanter; LE and ME, lateral and medial epicondyle of the femur, respectively; HF, head of the fibula; LM and MM, lateral and medial malleolus, respectively; CA, calcaneus; FM and VM, first and fifth metatarsal heads, respectively.
A local reference frame is shown for each of the lower limb segments. (C) Representation of the ten types of perturbation. Each perturbation involved the combination of longitudinal (i.e. N or S;
velocity profiles related to N and S components are reported on the top and on the bottom of the picture, respectively) and transversal (i.e. E or W; the mediolateral velocity profile is reported on the left of the picture) belt movements delivered while subjects were walking at speed v. (D) Four
time units were defined: PStridepre and UStridepre were recorded before the onset of the
perturbation and were related to perturbed and unperturbed limb, respectively (i.e. black and gray lines); while PStridepost and UStridepost were recorded after the onset of the perturbation. All time
units began and ended with the heel strike of the perturbed foot. Accordingly, the two couples of contralateral strides (i.e. PStridepre and UStridepre and, PStridepost and UStridepost) were fully
Two series accounting for ten different types of perturbation (Figure 2.1C), each involving the movement of either the left (NL, NW, W, SW, SL) or the right (NR, NE, E, SE, SR) belt, were delivered at the heel strike by imposing the speed profile shown in Figure 2.1C. Ten additional trials, in which no perturbation was applied, were also included in the experimental protocol. To obtain unbiased results: 1) participants did not know whether they would have been perturbed or not; 2) perturbations were supplied in random order; 3) data referring to all first perturbing occurrences were adopted for data analysis.
A set of 39 spherical markers (14 mm in diameter) was located on suitable body landmarks and recorded at 100 Hz by means of a six-camera-based Vicon 512 Motion Analysis System (Oxford, U.K.). Body kinematics and belt movements were synchronized using a logic pulse generated by SENLY while delivering perturbations. The global reference frame was located at the center of SENLY with X-axis along the anterior/posterior direction, Y-axis vertical, and Z-axis defined by the right-hand rule along the medial/lateral direction.
Research procedures were in accordance with the Declaration of Helsinki and were approved by the Local Ethical Committee.
2.3.2 Data pre-processing
With respect to the purpose of this study, a subset of the whole marker set was retained, accounting for all those located on the pelvis and on the legs (Figure 2.1B): sacrum (SACR), anterior iliac spines (ASIS), external surface of the greater trochanter (GT), lateral and medial epicondyle of the femur (LE and ME, respectively), head of the fibula (HF), lateral and medial malleolus (LM and MM, respectively), first and fifth metatarsal heads (FM and VM, respectively), calcaneus (CA), and additional markers rigidly attached to a wand over the midfemurs and the midshaft of the tibia. The 3D trajectory of each marker was filtered using a low pass Butterworth filter (zero-lag, fourth-order) with cut-off at 10 Hz to remove high frequency related noise. Missing data were estimated by means of cubic spline interpolation. According to previous literature (Borghese et al. 1996; Ivanenko et al. 2004; 2006), heel strike and toe off were identified based on the maximum and minimum elevation of the limb axis.
Data analysis was performed on data recorded during a time window including two consecutive and ipsilateral strides across the onset of the perturbation (see Figure 2.1D). The following time units were defined within this time window:
− PStridepre and PStridepost were two ipsilateral strides related to the perturbed
limb (i.e. PStride), recorded before (subscript pre) and after (subscript post) the onset of the perturbation; these strides began and ended with the heel strike of the perturbed foot;
− UStridepre and UStridepost were two ipsilateral strides related to the unperturbed
limb (i.e. UStride), recorded before (subscript pre) and after (subscript post) the onset of the perturbation; noticeably, UStridepre and UStridepost began and ended
with the heel strike of the perturbed foot, as well.
According to Figure 2.1D, the two couples of contralateral strides were fully overlapped. In addition: PStridepre and UStridepre were recorded when the subject was
walking in steady state condition; PStridepost and UStridepost were recorded while the
subject was managing the perturbation.
The duration of the stance phase expressed as a percentage of the gait cycle, namely stance%, related to the perturbed limb, was evaluated with respect to the strides before and
after the onset of the perturbation.
For each of the time units previously defined, the time course of the 3D trajectory of all markers was resampled over 101 points and considered for further analysis.
2.3.3 Data analysis
Each lower limb was modeled according to three segments: thigh (segment t), shank (segment s) and foot (segment f). Hip, knee and ankle joints were approximated as spherical and their centers were estimated in accordance with the literature (Martelli et al. 2013).
For each body segment, an orthogonal local reference frame was defined according to ISB recommendations (Allard 1997), as shown in Figure 2.1B. Then, the 3D orientation of each body segment was estimated with respect to the global reference frame by using the Cardan sequence z-x-y (Martelli et al. 2013; Martelli et al. 2010). Thus, the elevation angle of the ith body segment, namely α, was assumed to be equal to the elementary rotation about the zi axis.
Each joint angle, namely β, was estimated by using the 3D approach previously described (i.e. Cardan sequence z-x-y), as the misalignment between the z axes related to distal and proximal body segments. Accordingly, it describes the joint flex-extension.
For each of the four strides defined in the previous section (i.e. PStridepre and
βh, βk, βa) were separately pulled in two
101×
3
matrices which were later parsed outusing the Principal Component Analysis (PCA). Then, for both the elevation and the joint angles, the Coefficient of Variation (CV%) was computed as follows (Winter 1991):
100
101
1
101
1
%
101 1 101 1 2⋅
=
∑
∑
= = i i i ix
CV
σ
(2.1) where:− i indicates the ith over the 101 samples of the gait cycle;
−
x
iis the mean value over 15 subjects related to the ith sample of theobserved kinematic variable (i.e. joint or elevation angles); −
σ
i is the standard deviation of the vector whose mean isx
i.The Range of Motion (RoM) of both joint (i.e. RoMH, RoMK, and RoMA,
respectively for hip, knee and ankle joints) and elevation angles (i.e. RoMT, RoMS, and
RoMF, respectively for thigh, shank and foot segments) were also computed during the
perturbed and the unperturbed strides.
2.3.4 Principal Component Analysis (PCA)
For each subject, trial and stride (i.e. pre and post perturbation), data matrices referring to both joint and elevation angles underwent PCA, a well-known multivariate technique aimed at reducing dimensionality in the behavior of complex systems (Daffertshofer et al. 2004; Forner-Cordero et al. 2005). In particular, each 101× 3 data matrix (i.e. rows corresponding to observations and columns to kinematic variables) was firstly standardized with zero mean and unit variance and then parsed out via PCA. The outcome of the PCA consisted of a
3×
3
weighting coefficient matrix (or loading matrix) that linearly projects columns of the original dataset onto a 3D algebraic space, representing Principal Components (PCs). Extracted PCs are ordered according to their own explained variance: the first PC accounted for the greatest amount of data informativeness while the last one accounted for the lowest value (Daffertshofer et al. 2004).With respect to the purpose of this study, if kinematic variables covaried perfectly along a plane, the 3rd PC (i.e. the less significant one) would account for 0% of the whole data informativeness. However, it is unlikely for this condition to occur because data are usually noisy. Therefore, it has been assumed that the three kinematic variables (i.e. all
joint angles or all elevation angles) would lay on a plane if the cumulative variance accounted for by the first two components was at least 99%, as already carried out by previous authors (Barliya et al. 2009; Borghese et al. 1996).
Once homologous and coupled datasets (i.e. same kinematic variables, same side, before and after the perturbation) that did not evolve independently had been identified, the orientation of their covariation planes was investigated by defining the 3rd weight
coefficient vectors. Specifically, the covariation planes of two datasets would have the same orientation if the dot product of the 3rd weight coefficient vectors, namely dot
w3,
was 1. If confirmed, original kinematic variables were constrained to two parallel planes. Otherwise, kinematic variables lay on crooked planes. Again, since datasets were noisy, a threshold equal to 0.99 was adopted, reflecting a misalignment of 8.1 deg.
2.3.5 Statistical analysis
The effect of the independent variables named “direction of the perturbation” (i.e. paired NL/NR, NW/NE, W/E, SW/SE and SL/SR), “side of the perturbation” (i.e. left and right leg), and “time window” (i.e. pre and post perturbation) on the duration of the stride, stance%, and RoM of both joint and elevation angles was analyzed by means of the
within-subject 3-way Analysis Of Variance (ANOVA).
The one sample t-Test was used to verify whether the cumulative variance accounted for by the first two extracted components was equal to 99% and whether the misalignment of the weight coefficients vectors equaled the threshold.
To investigate the effect of factors “direction of the perturbation” (i.e. paired NL/NR, NW/NE, W/E, SW/SE and SL/SR) and “side of the perturbation” (i.e. left and right leg) on the similarity of the covariation plane orientations before and after the onset of the perturbation, the within-subject 2-way ANOVA was carried out on dotw3.
All data analysis was performed off-line in MATLAB (The MathWorks Inc. Cambridge, MA, USA) and the statistical significance was set at p<0.05.
2.4 Results
2.4.1 Spatio-temporal parameters
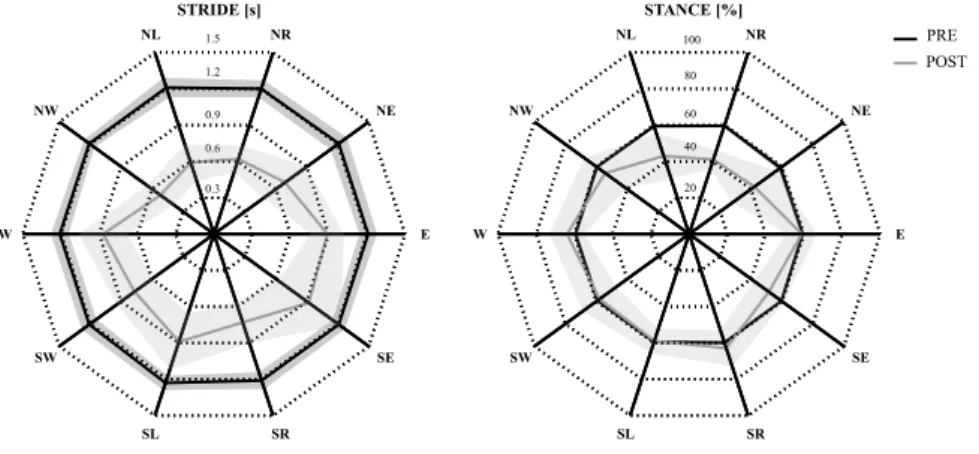
Subjects walked at an average speed of 1.10 ± 0.03 m/s (range: 1.02–1.14 m/s) and were able to recover their balance after the perturbation. The duration of the strides
before (i.e. PStridepre and UStridepre) and after (i.e. PStridepost and UStridepost) the onset of
the perturbation is shown in Figure 2.2.
0.3 0.6 0.9 1.2 1.5 E NE NR NL NW W SW SL SR SE STRIDE [s] 20 60 80 100 E NE NR NL NW W SW SL SR SE STANCE [%] 40 PRE POST
Figure 2.2: Temporal parameters of healthy young subjects
The picture shows mean (bold line) and one standard deviation (shaded area) of stride duration and stance%. Curves refer to trials before (dark gray) and after (light gray) the onset of the
perturbation, for all perturbations.
The 3-way ANOVA showed that both the direction of the perturbation (i.e. paired NL/NR, NW/NE, W/E, SW/SE and SL/SR) and the time window (i.e. before vs. after the onset of the perturbation) significantly affected stride duration (p<0.001 in both cases). Specifically, the stride duration decreased from 1.21 ± 0.07 s (range 1.06-1.36 s) to 0.75 ± 0.22 s (range: 0.27-1.84 s) after the onset of the perturbation (Figure 2.2).
Although the stride duration was not affected (p=0.257) by the side being perturbed, a significant interaction (p=0.034) was observed between factors “direction of the perturbation” and “side of the perturbation” consisting of a greater reduction of stride duration when diagonal perturbations were delivered toward the left side (i.e. NW and SW).
The statistical analysis of the stance% highlighted that factors “direction of the
perturbation” and “time window” significantly affected data variability (p<0.001; Figure 2.2). In particular, the stance phase:
- decreased from 59.5 ± 1.0% (range: 55.6-62.2%) to 53.7 ± 12.9% (range: 22.8-85.4%) after the onset of the perturbation;
- was influenced by the direction of the perturbation such that perturbations toward the fore-aft direction involved shorter stance% than the others.
The “side of the perturbation” factor and its interaction with the “direction of the perturbation” did not significantly affect stance% (p=0.056 and p=0.191, respectively).
2.4.2 Joint angles
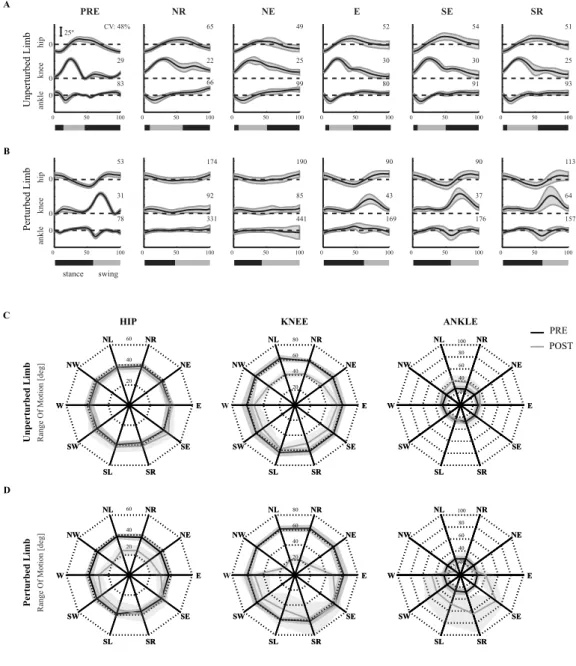
Figure 2.3 (subplots A and B) shows that, during steady locomotion, gait patterns on both limbs were comparable to those reported in literature at the same speed (Grasso et al. 1998; Monaco and Micera 2012) and out of phase between the limbs. As expected, after the onset of the perturbation, kinematics was altered and perturbations involved increased inter-subject variability, above all at the PL (see CV% in Figure 2.3, subplots A and B).
The analysis of the RoM at the hip joint (Figure 2.3, subplots C and D, and Table 2.1) revealed different behavior between PL and UL. Specifically, the RoMH at the PL
decreased significantly (p<0.001) after the perturbation from 37.8 ± 3.5 deg (range: 31.1-48.6 deg) to 29.1 ± 8.5 deg (range: 11.1-52.0 deg). In this respect, perturbations toward the forward direction (i.e. NR/NL and NW/NE) where characterized by lower values whereas the laterality of the perturbation did not significantly affect data variability (p=0.128). The RoMH at the UL did not significantly change after the onset of the
perturbation (p=0.942) whereas it was significantly affected by both the direction of the perturbation (p<0.001) and the perturbed side (p=0.013). Moreover, interaction between these two factors was observed (p=0.040; Table 2.1): the RoM increased with perturbation delivered toward the south direction (i.e. SR/SL and SW/SE) and on the right side.
20 40 60 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE C Unperturbed Limb HIP 20 40 60 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE D Perturbed Limb 20 40 60 80 E NE NR NL NW SW SL SR SE E NE NR NL NW W SW SL SR SE KNEE 20 40 60 80 E NE NR NL NW W SW SL SR SE E NE NR NL NW SW SL SR SE E E NE NE SE SE NR NR SR SR ANKLE 100 20 40 80 60 NL NL SL SL NW NW SW SW W W E E NE NE SE SE NR NR SR SR 100 20 80 60 40 NL NL SL SL NW NW SW SW W W 0 50 100 0 CV: 48% 25° knee 0 29 0 ankle 83 PRE hip 0 50 100 65 22 66 NR 0 50 100 hip 0 53 knee 0 31 0 ankle 78 0 50 100 174 92 331 0 50 100 51 25 93 SR 0 50 100 113 64 157 0 50 100 52 30 80 E 0 50 100 90 43 169 0 50 100 49 25 99 NE 0 50 100 190 85 441 0 50 100 54 30 91 SE 0 50 100 90 37 176 stance swing B Unperturbed Limb Perturbed Limb A
Range Of Motion [deg]
Range Of Motion [deg]
PRE POST
Figure 2.3: Joint angles
Subplots A and B show joint angle profiles (i.e. hip, knee and ankle) for unperturbed and perturbed limbs, respectively, before (i.e. PRE) and after the onset of the perturbation. To make reading easier, only data related to the perturbations delivered toward the right side (i.e. NR, NE,
E, SE, SR) are reported. Mean (bold lines) and ± one SD (shaded areas) are depicted for each condition. Black and gray bars below each subplot represent stance and swing phases, respectively. Coefficient of Variation (i.e. CV%) is shown for all joint angles and conditions.
Subplots C and D show the RoM for all joint angles profiles. Mean ± one SD are represented for all perturbations and for both limbs, i.e. UL and PL (subplots C and D, respectively). Dark and
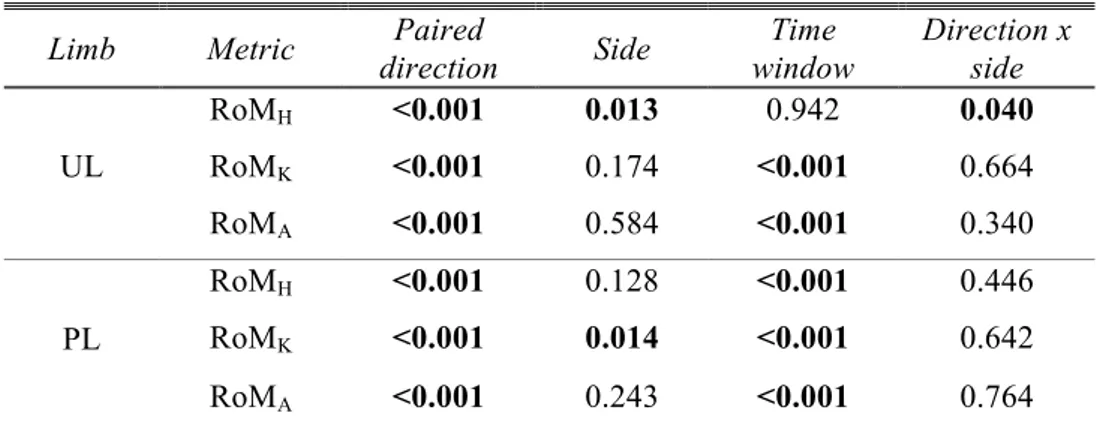
Table 2.1: 3-way ANOVA on joint angles
Limb Metric direction Paired Side window Time Direction x side
UL RoMH <0.001 0.013 0.942 0.040 RoMK <0.001 0.174 <0.001 0.664 RoMA <0.001 0.584 <0.001 0.340 PL RoMH <0.001 0.128 <0.001 0.446 RoMK <0.001 0.014 <0.001 0.642 RoMA <0.001 0.243 <0.001 0.764
The table shows the p-values related to the 3-way ANOVA for the effects of direction of the perturbation (i.e. paired NR/NL, NE/NW, E/W, SE/SW, SR/SL), side (i.e. right and left foot) and time window (i.e. before and after the onset of the perturbation) on the RoM of joint angles (i.e. RoMH, RoMK and RoMA) for both unperturbed and perturbed limbs (i.e. UL and PL). When the
p-value is statistically significant (p<0.05), it is highlighted in bold.
The RoMK (Figure 2.3, subplots C and D, and Table 2.1) was significantly affected
by factors “direction of the perturbation” and “time window” at both limbs (p<0.001). Specifically, after the perturbation, RoMK decreased from 60.9 ± 5.0 deg (range: 48.2-77
deg) to 37.7 ± 20.1 deg (range: 10.6-84.3 deg) and to 48.2 ± 8.9 deg (range: 28.9-69.0 deg), respectively for the PL and the UL. Moreover, perturbations delivered toward the north direction where characterized by lower values of RoMK compared to the other
directions, in both legs. The “side of the perturbation” factor only affected the RoMK at
the PL (p=0.014), such that perturbations delivered toward the right side involved higher RoM than the contralateral one.
Analysis of the RoMA (Figure 2.3, subplots C and D, and Table 2.1) showed that
“direction of the perturbation” and “time window” factors significantly affected data variability at both limbs (p<0.001). In particular, after the perturbation, RoMA increased
from 27.0 ± 4.7 deg (range: 17.95-42.08 deg) to 38.8 ± 27.6 deg (range: 2.1-93.8 deg) and to 32.8 ± 8.1 deg (range: 15.6-61.7 deg), respectively for both the PL and the UL. Concerning the effect of the perturbation direction, legs behaved differently: RoMA at the
PL decreased when the perturbations were delivered toward the north (i.e. NR/NL and NW/NE); RoMA at the UL increased when the perturbations were delivered toward the
north (i.e. NR/NL and NW/NE). The “side of the perturbation” factor did not affect data variability (p>0.05).
2.4.3 Elevation angles
Elevation angles during steady locomotion (Figure 2.4, subplots A and B) were comparable with those reported in literature (Lacquaniti et al. 2002) and, as expected, were out of phase between right and left sides. Due to the perturbation, the time course of elevation angles significantly changed in terms of amplitude, rate of oscillation and inter-subject variability. In this respect, greater inter-inter-subject variability was observed for the PL compared to the contralateral one (see CV% in Figure 2.4, subplots A and B).
The analysis of the thigh RoM (Figure 2.4, subplots C and D, and Table 2.2) revealed that the RoMT of the PL was significantly modified by all factors (p<0.001 for “direction”
and “time window”; p=0.012 for the “side”). Specifically, after the onset of the perturbation, RoMT decreased from 37.7 ± 3.2 deg (range: 30.9-47 deg) to 29.1 ± 8.5 deg
(range: 11.1-52.0 deg); perturbations delivered toward the north direction and the left side (i.e. NL and NW) involved smaller angular excursions. The RoMT of the UL was instead
only affected by the direction of the perturbation (p=0.017). In particular, the RoM was smaller when perturbations were delivered toward the south (i.e. SR/SL) and the lateral (i.e. E/W) directions.
The RoMS in both legs (Figure 2.4, subplots C and D, and Table 2.2) was
significantly (p<0.05) altered by all factors. Specifically, after the onset of the perturbation, the RoMS decreased from 72.1 ± 4.2 deg (range: 59.1-84.5 deg) to 37.7 ±
20.1 (range: 10.6-84.2 deg) and 50.0 ± 10.4 deg (range: 28.9-80.7 deg), respectively for the PL and the UL; perturbations delivered toward the north (i.e. NR/NL and NW/NE) involved smaller RoMS; the RoMS of the PL and the UL changed differently depending
on the perturbed side.
The RoMF at the PL (Figure 2.4, subplot D, and Table 2.2) was significantly altered
by all factors (p<0.05) to such an extent that it decreased after the onset of the perturbation from 88.4 ± 7.4 deg (range: 67.5-104.2 deg) to 36.8 ± 26.5 deg (range: 2.1-93.8 deg). Moreover, perturbations delivered toward the left side and the north direction (i.e., NL and NW) involved smaller RoMF. The RoMF at the UL (Figure 2.4, subplot C,
and Table 2.2) was significantly modified (p<0.001) by the “direction” and “time window” factors. Specifically, RoMF changed after the perturbation from 88.0 ± 7.0
(range: 67.8-102.3 deg) to 71.4 ± 8.6 deg (range: 50.0-91.4 deg); perturbations delivered toward the south (i.e. SR/SL) involved higher RoMF.
20 40 60 E NE NR NL NW W SW SL SR SE E NE NR NW W SW SL SR SE C Unperturbed Limb THIGH 20 40 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE D Perturbed Limb 60 20 40 60 80 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE SHANK 20 40 60 80 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE 20 40 60 80 100 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE FOOT 20 40 60 80 100 E NE NR NL NW W SW SL SR SE E NE NR NL NW W SW SL SR SE 0 50 100 0 CV: 27% 25° 0 16 0 31 0 50 100 40 27 36 0 50 100 0 26 0 18 0 27 0 50 100 46 191 239 0 50 100 25 13 27 0 50 100 77 65 79 0 50 100 26 15 27 0 50 100 75 33 81 0 50 100 22 15 32 0 50 100 61 203 422 0 50 100 26 16 27 0 50 100 58 31 50 stance swing A Unperturbed Limb B Perturbed Limb PRE NR NE E SE SR foot shank thigh foot shank thigh
Range Of Motion [deg]
Range Of Motion [deg]
PRE POST
Figure 2.4: Elevation angles
(A-B) Elevation angle profiles (i.e. thigh, shank and foot) are shown for unperturbed and perturbed limbs (subplots A and B, respectively), before (i.e. PRE) and after the onset of the perturbation. To make reading easier, only data related to the perturbations delivered toward the right side (i.e. NR, NE, E, SE, SR) are reported. Mean (bold lines) and ± one SD (shaded areas) are depicted for each condition. Black and gray bars below each plot represent stance and swing phases, respectively. Coefficient of Variation (i.e. CV%) is shown for each elevation angle and each condition. (C-D) The elevation angles Range of Motion [deg] are shown. Mean ± one SD are
represented for all perturbations and for each limb, i.e., UL and PL (subplots C and D, respectively). Dark and light gray lines show data recorded before and after the onset of the
Table 2.2: 3-way ANOVA on elevation angles
Limb Metric Paired
direction Side Time window Direction x side UL RoMT 0.017 0.690 0.971 0.159 RoMS <0.001 0.001 <0.001 0.650 RoMF <0.001 0.057 <0.001 0.512 PL RoMT <0.001 0.012 <0.001 0.464 RoMS <0.001 0.015 <0.001 0.587 RoMF <0.001 0.029 <0.001 0.356
The table shows the p-values related to the 3-way ANOVA for the effects of direction of the perturbation (i.e. paired NR/NL, NE/NW, E/W, SE/SW, SR/SL), side (i.e. right and left foot) and time windows (i.e. before and after the onset of the perturbation) on the RoM of elevation angles (i.e. RoMT, RoMS and RoMF) for both unperturbed and perturbed limb (i.e. UL and PL). When the
p-value is statistically significant (p<0.05), it is highlighted in bold.
2.4.4 Covariation of kinematic variables
Joint angles
The PCA carried out on matrices of joint angles revealed that these data did not generally lie on a plane according to the adopted criteria. Specifically, on average, the first two PCs accounted for between 70 and 99.8% of data variance, i.e., only in a few cases (12.3% of the dataset related to the perturbation) the first two PCs accounted for more than 99% of data informativeness (Figure 2.5). According to these results, the time course across joint angles was not tightly coupled, that is, if plotted one versus the others, the resulting loops would not lay close to a plane. Therefore, the hypothesis that joint angles covary was rejected and I could not hence perform any analysis of similarity of the covariation planes.
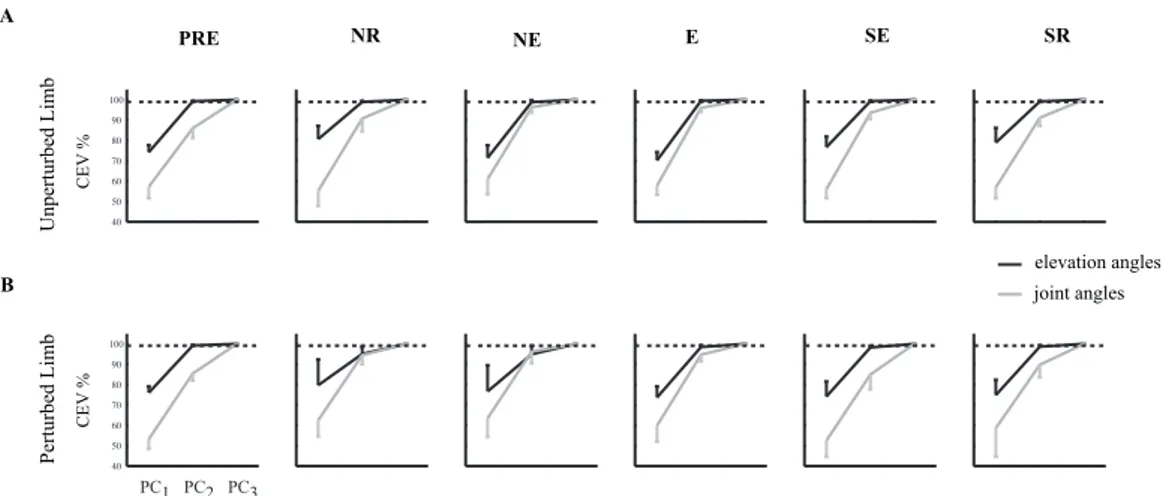
40 50 60 70 80 90 100 PC1 PC2 PC3 40 50 60 70 80 90 100 A B PRE NR NE E SE SR Unperturbed Limb Perturbed Limb CEV % CEV % elevation angles joint angles
Figure 2.5: Cumulative Explained Variance of Principal Components
The picture shows mean and one standard deviation (one side error bar) of the cumulative explained variance (i.e. CEV%) of PCs extracted from the joint and elevation angles analysis (gray
and black lines, respectively). The dotted line represents the threshold set at 99%. Subplots A and B represent results for unperturbed and perturbed limbs, respectively. Only data obtained during steady locomotion (i.e. PRE) and during right perturbations (i.e. NR, NE, E, SE, SR) are shown to
make reading easier.
Elevation angles
The PCA carried out on elevation angles revealed that, on average, the first two PCs extracted from data matrices related to the UL, pre and post perturbation, with the exception of data referring to NL, accounted for more than 99% of data variance (Figure 2.5A). The cumulative variance explained by the first two PCs extracted from the dataset referring to the NL was only slightly lower than the threshold (i.e. 98.3 ± 1.2%; p=0.079; one sample t-Test). Therefore, I decided to investigate the orientation of the covariation plane for this dataset, as well.
With respect to the PL (Figure 2.5B), the PCA performed on data recorded pre and post perturbation and referring to E/W, SE/SW and SR/SL directions showed that the cumulative variance related to the first two PCs was statistically comparable (p>0.05; one sample t-Test) or greater than 99%. For the remaining cases (i.e. NL/NR and NE/NW), the variance accounted for by the first two PCs ranged between 91.0 ± 5.1 to 96.3 ± 2.9% (mean ± SD across subjects and north perturbations trials) which was significantly lower than the threshold (p<0.05; one sample t-Test). In these cases, the hypothesis of covariation across body segments was rejected and no further analysis was carried out.
Figure 2.6 shows that the time course of elevation angles before the onset of the perturbation resembled those widely reported in literature (Borghese et al. 1996; Courtine
and Schieppati 2004; Ivanenko et al. 2007; Lacquaniti et al. 2002). Specifically, the elevation angles of thigh, shank and foot covary along a plane describing regular trajectory loops. In addition, loops are characterized by a significant stereotyped behavior across subjects and trials.
20 0 -20 PRE vs NR -40 -20 0 20 -40 -80 40 0 thigh [deg] 20 0 -20 -40 -20 0 shank [deg] 20 40 -80 0 -40 foot [deg] 20 0 -20 PRE vs NE -40 -20 0 20 -40 0 -80 40 20 0 -20 -40 -20 0 20 -80 -40 0 40 20 0 -20 PRE vs E -40 -20 0 20 -40 0 40 -80 20 0 -20 -40 -20 0 20 -40 0 40 -80 20 0 -20 PRE vs SE -40 -20 0 20 -80 0 40 -40 20 0 -20 -40 -20 0 20 -80 -40 0 40 20 0 -20 PRE vs SR -40 -20 0 20 -40 -80 40 0 20 0 -20 -40 -20 0 20 -80 -40 0 40 Perturbed Limb Unperturbed Limb PRE POST A B
Figure 2.6: Planar Covariation Law
Planar covariation of the elevation angles at the thigh, shank and foot (3-D position-space). Magenta and green lines describe trajectories obtained before and after the onset of the perturbation, respectively. Trials performed by each subject are superimposed. Grids correspond to
the best-fitting planes. Only results related to the right perturbations (i.e. NR, NE, E, SE, SR) are presented for both the unperturbed and perturbed limb (subplots A and B, respectively) to make
reading easier.
After the onset of the perturbation (Figure 2.6), the time course of the elevation angles was altered with different features:
− the trajectories related to the UL did not appear to be closed even though they followed those obtained before the onset of the perturbation and were characterized by low inter-subject variability;
− the trajectories related to the PL were instead dissimilar across subjects and perturbations; specifically, when perturbations were delivered toward the north (i.e. NR/NL and NE/NW), intersegmental coordination was abruptly modified involving 3D data dispersion, as confirmed by the analysis of the cumulative variance (Figure 2.5B); when perturbation had lateral and/or south components, trajectories appeared to be closed even though abnormal.
The analysis of the orientation of covariation planes related to the UL, before and after the onset of the perturbation, showed that dotw3 ranged between 0.96 and 0.99 (mean ± SD were 0.99 ± 0.01), which was statistically comparable or higher than the threshold. Accordingly, covariation planes could be considered parallel. It is important to remark that this result was shared across all ten perturbations. The 2-way ANOVA revealed that neither the direction of the perturbation (i.e. paired NR/NL, NE/NW, E/W, SE/SW, SR/SL) nor the perturbed side (i.e. L versus R) significantly affected the value of dotw3.
The analysis of the orientation of covariation planes related to the PL, before and after the onset of the perturbation, showed that dotw3 ranged between 0.50 and 0.99 (mean
± SD were 0.97 ± 0.07). For this limb, the covariation planes could be considered parallel only when observing data related to paired E/W, SE/SW, SR/SL perturbations, that is, perturbations delivered toward the north (i.e. paired NR/NL, NE/NW) can significantly alter the intersegmental coordination described by the covariation law. The 2-way ANOVA showed that neither the direction of the perturbation (i.e. paired NR/NL, NE/NW, E/W, SE/SW, SR/SL) nor the perturbed side (i.e. L versus R) significantly affected the value of dotw3.
2.5 Discussion
The planar covariation law of elevation angles has been investigated in several voluntary locomotion tasks in humans (Borghese et al. 1996; Courtine and Schieppati 2004; Ivanenko et al. 2005a). To the best of my knowledge, this is the first study where the law of intersegmental coordination is analyzed in subjects while managing unexpected multi-directional slip-like perturbations delivered during steady locomotion. In particular, it has been tested the hypothesis that intersegmental coordination related to the PL while being perturbed differs from that observed during steady walking. On the other hand, it has been hypothesized that the reactive behavior of the UL is instead characterized by an intersegmental coordination strategy resembling that adopted during unperturbed walking. Furthermore, it has been analyzed the consistence of the planar covariation law of both elevation and joint angles in order to provide a further contribution to the debated question concerning the origin of this intersegmental coordination strategy (Hicheur et al. 2006; Ivanenko et al. 2008).