UNIVERSITÀ DI PISA
FACOLTÀ DI INGEGNERIA
CORSO DI LAUREA MAGISTRALE IN
INGEGNERIA DELLE TELECOMUNICAZIONI
TESI DI LAUREA
Simulatore Software per Sonar a Scansione Laterale
Il candidato:
Marco Casparriello
I relatori:
Prof. Ruggero Reggiannini
Prof. Filippo Giannetti
Ing. Giovanni Ballini
Pagina 2
Ringrazio il prof. Reggiannini per la possibilità offertami di studiare ed approfondire un argomento così interessante, l’ing. Giovanni Ballini, per avermi seguito ed aiutato con i suoi preziosi consigli e gli spunti di riflessione durante tutto il lavoro di tesi, la mia fidanzata che mi è sempre stata vicina anche nei momenti più difficili, la mia famiglia per avermi sostenuto in tutto il mio percorso di studi.
Pagina 3
Indice
Introduzione ... 3
Capitolo 1 Il Side Scan Sonar ... 6
1.1 Introduzione ... 6
1.2 Risoluzione ... 8
1.3 Impulso trasmesso ... 10
1.4 Schema a blocchi di un side scan sonar ... 12
1.5 Post-Elaborazione del segnale ricevuto ... 13
1.6 L’equazione del sonar ... 15
1.7 Unità di misura ... 16
Capitolo 2 Parametri acustici in mare ... 17
2.1 Introduzione ... 17
2.2 Velocità del suono ... 17
2.3 Attenuazione per assorbimento ... 18
2.4 Effetto di curvatura dei raggi ... 20
2.5 Riflessione ... 24
2.6 Scattering ... 27
2.7 Legge di Lambert ... 30
2.8 Ombre acustiche ... 31
Capitolo 3 Descrizione del Software ... 32
3.1 Schema di principio del simulatore ... 32
3.2 Modelli ... 34
3.3 Approccio Cell Scattering ... 36
3.4 Parametri di ingresso e approssimazioni ... 41
3.5 Generazione della rugosità del fondale... 44
3.6 Batimetria ... 47
3.7 Posizionamento di oggetti sul fondale ... 48
3.8 Backscattering ... 49
3.9 Algoritmo di individuazione dei punti in ombra ... 53
Pagina 2
3.11 Simulazione del movimento del sonar ... 56
3.12 Algoritmo di correzione per i punti a quota non nulla ... 58
3.13 Aggiunta del rumore ... 60
Capitolo 4 Risultati e Simulazioni ... 63
Appendice A ... 72
Appendice B ... 75
Appendice C ... 76
Riferimenti ... 78
Pagina 3
Introduzione
Il sonar, termine che nasce come acronimo dell'espressione inglese sound navigation and ranging, è una tecnica che impiega la propagazione del suono (generalmente sottacqua) per navigare, comunicare o rilevare la presenza e la posizione di imbarcazioni. Si distinguono sonar attivi e sonar
passivi. I primi illuminano acusticamente il bersaglio e rilevano l’onda acustica riflessa, i secondi misurano le emissioni sonore spontaneamente emanate dai bersagli (ad esempio navi e sottomarini). Il sonar può essere usato come mezzo di localizzazione acustica. La banda di frequenze utilizzate dai sistemi sonar va da pochi Hertz al migliaio di kHz.
Il sonar, il quale rappresenta l’equivalente acustico del radar che invece impiega onde elettromagnetiche , fu inventato da Paul Langevin, fisico francese, durante la prima guerra mondiale
Pagina 4
nel 1917. Il suo primo impiego fu quello di utilizzare ultrasuoni per rilevare la presenza di sottomarini.
Oggi, i sistemi sonar vengono impiegati per la rivelazione di bersagli e per la costruzione di immagini acustiche del fondale.
In questa tesi ci concentreremo sui secondi e in particolare sui Side Scan Sonar (Sonar a scansione laterale). Questi ultimi vengono impiegati in particolari applicazioni quali l’individuazione di oggetti depositati sul fondale, come relitti o reperti archeologici, e in applicazioni militari quali la localizzazione di mine navali, particolarmente pericolose per la navigazione, se non rimosse lungo le rotte.
I Side Scan Sonar sono dei dispositivi acustici, che vengono montati su una piattaforma detta tow-fish in grado di spostarsi a velocità costante e con una certa stabilità (eccessive vibrazioni
Pagina 5
andrebbero a disturbare la formazione dell’immagine con il fenomeno noto come effetto mosaico). Essi sono composti da un generatore di impulso, un trasmettitore, un ricevitore e due array di idrofoni (l’idrofono è l’equivalente acustico dell’antenna, è un trasduttore che converte il segnale elettrico in onda acustica. Esso è in grado di dare una certa direttività al fascio irradiato).
La particolarità del Side Scan Sonar è che gli idrofoni sono montati lateralmente in modo da avere l’impronta acustica del fascio quasi parallela alla superficie del mare e questo permette di aumentare la visibilità in across track, ovvero perpendicolarmente alla direzione di propagazione della piattaforma.
La piattaforma è collegata tramite cavi ad una imbarcazione, e tramite questi è possibile controllare il movimento del tow-fish e ricevere e memorizzare i dati rilevati dal sonar.
L’angolo di apertura del fascio irradiato è estremamente stretto (qualche frazione di grado) in azimut poiché da quest’ultimo dipende la risoluzione along track (risoluzione lungo la direzione di avanzamento del tow-fish).
Dal punto di vista del funzionamento questo genere di sonar può essere equiparato al RAR (Radar ad apertura reale).
Pagina 6
Capitolo 1 Il Side Scan Sonar
Equation Section 1
Equation Section 1
1.1 Introduzione
Il Side Scan Sonar, come anticipato nell’introduzione è un tipo particolare di sonar, che monta lateralmente, due array di idrofoni. Il diagramma di irradiazione, tipicamente è costituito da una apertura in elevazione molto elevata (decine di gradi) e una apertura in azimut molto stretta (dell’ordine del grado o una frazione).
Pagina 7
L’inclinazione degli idrofoni rispetto alla direzione perpendicolare al fondale, detta nadir, è di qualche decina di grado. La figura 1.2 mostra il funzionamento.
Figura 1.2 Definizione dei parametri per unSide Scan Sonar [2].
Data la bassa velocità del suono (nel mare in condizioni standard: c≈1500 m/s), anche alle basse frequenza, si hanno lunghezze d’onda relativamente piccole. Ad esempio a 10 kHz, la lunghezza d’onda è di circa 15 cm.
La velocità del suono è un parametro che è fortemente condizionato dalla profondità del mare, dipendendo esso da temperatura, salinità e pressione.
Poiché l’indice di rifrazione dipende dalla velocità del suono, e poiché questo varia in funzione della profondità, si ha un effetto di curvatura sui raggi che si propagano da e verso il fondale.
Il Side Scan Sonar è un sonar attivo che emette impulsi acustici. Sfruttando l’eco ricevuto, tramite un algoritmo di elaborazione delle immagini, è possibile ricostruire un’immagine del fondale.
Pagina 8
1.2 Risoluzione
La risoluzione è un concetto legato alla capacità di distinguere, ovvero risolvere due oggetti separati spazialmente. Bisogna fare una distinzione tra quella che è la risoluzione across-track, e quella che è la risoluzione along-track.
Per risoluzione across-track (figura 1.3) si intende la minima distanza
R
, relativa al ricevitore, tra due bersagli puntiformi, necessaria affinché i due echi ricevuti non risultino sovrapposti nel tempo. La risoluzione across-track è un concetto strettamente legato alla durata dell’impulso. Infatti, dati due bersagli puntiformi, posti l’uno a distanza R e l’altro a distanza 1 R2 dal ricevitore, la distanza relativa minima R R2R1, affinché i due echi non risultino sovrapposti, è pari a cT/2, dove con T e c, si sono indicati rispettivamente la durata dell’impulso e la velocità del suono.Come si fa anche per le applicazioni radar, si divide lo spazio in celle di risoluzione di lunghezza pari a cT/2 e si preleva un campione per cella. Pertanto, l’intervallo di campionamento, è pari a T.
Per risoluzione along-track, si intende invece la capacità di risolvere due oggetti posti entrambi a distanza R dal ricevitore. Gli echi risultano sovrapposti nel tempo, ma non in frequenza (questo perché la diversa posizione dei due oggetti, fa si che i due echi ricevuti subiscano un diverso spostamento doppler). Sarebbe possibile aumentare la risoluzione along-track, sfruttando dei filtri che operano in frequenza, compensatori del moto della piattaforma. Questa operazione, alla base dei sonar ad apertura sintetica (SAS), non è eseguita per quelli ad apertura reale.
Figura 1.3 Cella di risoluzione.
Pagina 9
dall’angolo di apertura dell’idrofono , che deve risultare molto piccolo, e aumenta con la distanza R:
x R
(1.1)
Per quanto riguarda invece la risoluzione across-track, noi siamo interessati alla sua proiezione sul fondale y. Quest’ultima, non è costante, ma varia in funzione dall’angolo di incidenza del raggio acustico
.In formule, la risoluzione along-track è:
2 cos tan 1 1 sin cT y H H
(1.2)
In genere, però si fa riferimento alla seguente approssimazione:
2sin cT y
(1.3)
Come illustrato in figura 1.4, se si ipotizza un fondale piatto, ogni cella è una porzione di corona circolare. All’aumentare della distanza dal ricevitore R, la risoluzione along-track
x tende ad aumentare, mentre quella across-track y diminuisce.Pagina 10
Ciascun campione prelevato dal segnale di eco ricevuto, è il frutto del contributo di tutti gli scatteratori presenti nella relativa cella di risoluzione.
Per una corretta ricostruzione dell’immagine, bisogna evitare di lasciare buchi lungo il tracciato, e questo pone un limite massimo alla velocità a cui la piattaforma può viaggiare.
Sia Rmax la massima distanza rilevabile dal sonar, TR 2Rmax/c è il tempo che intercorre tra un impulso ed il successivo. Bisogna imporre che lo spostamento compiuto dal sonar in un tempo pari a T , sia minore della minima risoluzione along-track R xmin H; con H si è indicato la distanza al nadir tra SSS e fondale (la quota del SSS dal fondale). Perché questa condizione sia rispettata, la velocità massima con cui la piattaforma può viaggiare, deve essere:
min max max 2 R x cH v T R
(1.4)
1.3 Impulso trasmesso
L’impulso trasmesso dipende dal tipo di sonar che viene impiegato (figura 1.5). Un sonar ad onda continua, trasmette un segnale sinusoidale di durata pari a T, e frequenza f. La risoluzione, parametro che dipende dalla durata dell’impulso in uscita dal filtro adattato, è pari a R cT/ 2, come detto nel paragrafo 1.2. L’espressione dell’impulso trasmesso è:
0
( ) sin 2 0
S t A f t if t T
(1.5)
La risoluzione può migliorare, a parità di durata T dell’impulso trasmesso, se si utilizzano sonar a compressione analogica (segnali “Chirp”). L’espressione dell’impulso trasmesso è la seguente:
0 ( ) sin 2 0 2 t T S t A f m t if t T
(1.6)
Pagina 11
La frequenza dell’impulso ha un andamento lineare:
0 ( ) 2 T f t f m t
(1.7)
La risoluzione in questo caso, può essere aumentata a parità di T e quindi di energia trasmessa, allargando la banda. L’espressione della risoluzione across-track di un sonar Chirp è la seguente:
2 c R
B
(1.8)
La banda, è pari a: BmT. In figura 1.5 sono mostrati alcuni impulsi tipicamente utilizzati in applicazioni sonar.
Pagina 12
1.4 Schema a blocchi di un side scan sonar
L’immagine in figura 1.6 mostra lo schema di principio di un side scan sonar.Figura 1.6 Schema a blocchi [2] di un sistema sonar generico. Alcuni componenti dello schema potrebbero essere disposti in ordine diverso.
Le operazioni che il ricevitore esegue in sequenza sono le seguenti:
TVG (Time variable gain). Equalizzazione del livello dell’eco ricevuto.
Demodulazione e filtraggio
Processing di tipo non coerente: rivelatore di inviluppo – filtro passa basso (il ricevitore cambia se il sistema è a compressione di impulso)
Conversione Analogico Digitale (A/D)
Compensazione del guadagno di processing
Memorizzazione dei dati
L’equalizzazione si rende necessaria, perché raggi provenienti da punti del fondale a distanza maggiore subiscono maggiore perdita per propagazione e per assorbimento.
Il fattore di equalizzazione che viene applicato al segnale ricevuto, dipende dal raggio r ed è pari a:
4 2 10 r
r
Pagina 13
Se l’equalizzazione non venisse eseguita ne risulterebbe compromessa la qualità dell’immagine. L’intervallo di campionamento è pari alla durata dell’impulso per un sistema ad onda continua. Dopo il campionamento, si passa alla digitalizzazione dei dati campionati. L’immagine è rappresentata da una matrice. Gli elementi di tale matrice, rappresentano ciascuno un pixel dell’immagine, ovvero il livello di intensità luminosa con cui quel punto sarà stampato sullo schermo di visualizzazione.
Poiché i segnali sono di tipo monocromatico, non è possibile ottenere un immagine a “colori” (ovviamente, lavorando nella gamma dell’acustico, e operando con onde non elettromagnetiche si tratterebbe di “colori acustici”, diversi dai colori che vedremmo illuminando il fondale con una sorgente luminosa). Immaginando un sistema di memorizzazione a 8 bit per campione, ogni pixel sarebbe rappresentato da un intero compreso tra 0 e 255 (si va da un’intensità nulla che corrisponde ad un punto nero, a un’intensità massima pari a 255 che corrisponde al bianco).
Per ogni impulso trasmesso si costruisce una riga della matrice dell’immagine. Pertanto la riga i-esima della matrice, rappresenta la striscia i-i-esima del fondale.
1.5 Post-Elaborazione del segnale ricevuto
L’immagine che si ricostruisce, stampando semplicemente la matrice dei dati, ottenuti dal campionamento e dalla digitalizzazione del segnale ricevuto, anche se può risultare di buona qualità, non è corretta dal punto di vista geometrico. Questo perché le celle di risoluzione in distanza del fondale sono di dimensione variabile.
Per ovviare a questo inconveniente, bisogna effettuare una correzione geometrica, modificando opportunamente l’asse y, relativo ad una striscia di fondale.
La correzione risulta facile nell’ipotesi di fondale piatto:
2 2 2 4 c t
y H
(1.10)
Pagina 14 verificata:
2 2 2 4 c t y H y(1.11)
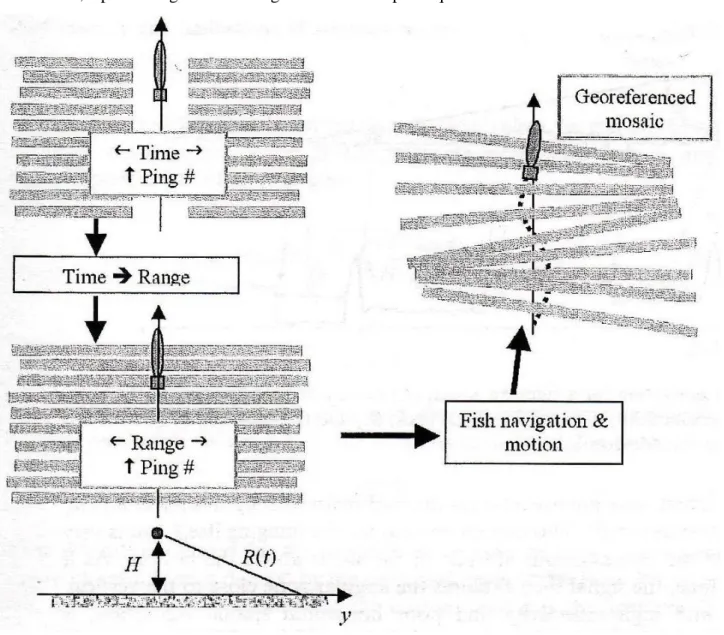
La non perfetta stabilità della piattaforma, crea una distorsione nell’immagine acquisita, nota come effetto mosaico (figura 1.7). Se il semovente, è equipaggiato di un dispositivo di controllo delle oscillazioni, è possibile generare un algoritmo che compensi questo effetto.
Figura 1.7 L’immagine di sinistra mostra come a partire dal ritardo dell’eco è possibile risalire al range. L’immagine di destra, mostra invece il fenomeno dell’effetto mosaico.
Pagina 15
1.6 L’equazione del sonar
Per poter fare una stima delle prestazioni di un sonar, è molto utile stimare il rapporto segnale rumore. Per fare ciò si può ricorrere alle equazioni del sonar.
Iniziamo dal caso di sonar passivo [13], in tal caso il segnale da rilevare, è generato direttamente dai bersagli (ad esempio, sottomarini o navi). L’espressione per il rapporto segnale-rumore è la seguente:
SNRSL TL NL DI
(1.12)
SNR = 10log(S/N) è il rapporto segnale rumore espresso in dB
TL: Transimission (or propagation) loss, sono le perdite per propagazione in dB
NL: Total Noise, rappresenta la potenza di rumore complessivo (termico ed ambientale) in dB DI: Directive Index, indice di direttività in dB
Mettiamoci ora nel caso del sonar attivo,
2
SNRSL TL TS NL AG
(1.13)
TS, è il target strength in dB ed è un parametro che sarà descritto nel prossimo capitolo, e in pratica misura quanta potenza un bersaglio è capace di riflettere nella direzione del sonar.
AG, Array Gain in dB, misura il guadagno in rapporto segnale-rumore dovuto all’array di idrofoni ricevente.
Pagina 16
1.7 Unità di misura
Nelle applicazioni acustiche si utilizza principalmente il sistema MSK (metro, chilogrammo, secondo). Nel sistema MSK, la pressione si misura in N/m o Pascal (Pa). Dato i valori 2 relativamente bassi di pressione delle onde acustiche generate dai sonar, tipicamente si utilizza il
Pa
( 6
1Pa10 Pa).
La potenza per unità di superficie associata ad un onda sonora, è rappresentata dall’intensità acustica I e si misura in W/m . 2
Un parametro che spesso viene utilizzato, per caratterizzare l’onda acustica generata dalla sorgente è il Source Level (SL), e rappresenta l’intensità acustica ad una distanza unitaria (tipicamente 1m). Un esempio di Source Level fornito dai datasheet (vedi appendice C) è il seguente:
200
SL dB re 1 Pa @ 1m
Che significa 200 dB riferiti ad 1 Pa e ad una distanza di 1m dal sonar. Se si vuole ricavare il valore dell’intensità acustica I ad 1m di distanza dalla sorgente, si può procedere come segue: 0
0 20 log ref p SL p
(1.14)
Prima si calcola la pressione p0, ad 1 metro di distanza dalla sorgente, utilizzando come pressione di riferimento pref 1Pa. Infine si può sfruttare la relazione che lega la pressione all’intensità:
2 0 0 p I c
(1.15)
Pagina 17
Capitolo 2 Parametri acustici in mare
Equation Section 2
2.1 Introduzione
L’ambiente marino, così come avviene per lo studio della propagazione delle onde elettromagnetiche, in cui bisogna tener conto della composizione del mezzo e delle condizioni al contorno, va caratterizzato attraverso parametri caratteristici, tra i quali ricordiamo: la velocità del suono, l’intensità di traffico navale (segnale acustico di disturbo), la densità di popolazione biologica (microorganismi e pesci), il particellato solido, la composizione e la batimetria del fondale, il moto ondoso superficiale. Tutti questi parametri influiscono sulla qualità delle immagini che si vanno a ricostruire.
2.2 Velocità del suono
La velocità del suono c (m/s) dipende dalla salinità S (‰), dalla temperatura T (°C) e dalla profondità D (m) [1]. -2 2 -4 3 -2 -7 2 -2 -13 3 1448.96 4.591 5.304 × 10 T + 2.374 × 10 T + + 1.340(S - 35) + 1.630 × 10 D + 1.675 × 10 D + - 1.025 × 10 T(S - 35) - 7.139 × 10 TD c T
(2.1)
Come si evince dalla formula, la velocità del suono è un parametro che dipende fortemente dalla profondità e dalla temperatura, la quale è a sua volta un parametro che dipende dalla quota.
Pagina 18
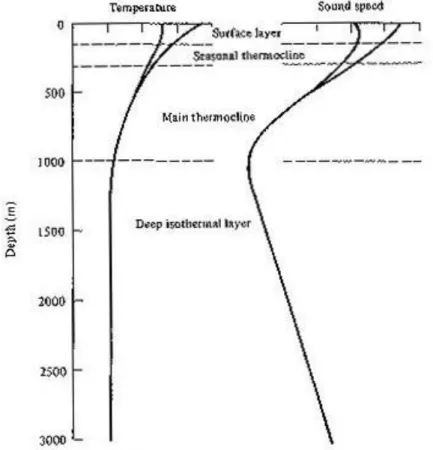
Pertanto, è possibile considerare, con buona approssimazione, la velocità del suono, una funzione della sola profondità. In figura 2.1 è riportato un tipico profilo di temperatura e di velocità del suono dell’oceano.
Figura 2.1 Temperatura e velocità del suono in funzione della quota. Notare che raggiunta la profondità di circa 1000 metri (isoterma profonda) la temperatura dell’oceano si stabilizza a circa 2°C, e la velocità del suono ha un andamento quasi lineare. Al di sopra dell’isoterma, il profilo dipende fortemente dalla
latitudine e dalle condizioni climatiche.
2.3 Attenuazione per assorbimento
L’acqua di mare introduce un attenuazione all’onda acustica che si propaga al suo interno, sia per effetto dell’attrito, sia per effetto della presenza di solfato di magnesio (MgSO4), acido borico
(B(OH)3 ) ed altre sostanze disciolte. L’attenuazione introdotta, nota come perdita per assorbimento
è una funzione crescente della frequenza.
Sperimentalmente, si è verificato, che l’attenuazione che il mezzo introduce, è di tipo esponenziale. Tipicamente si fa riferimento all’attenuazione logaritmica riferita ad una unità di distanza. Per
Pagina 19
ottenerla, si può utilizzare la legge di Thorp:
2 2 4 2 2 2 0.1 40 2.75 10 0.003 / 0.9144 / 1 4100 f f f dB Km f f (2.2)
La frequenza deve essere misurata in kHz ed il risultato è espresso in dB/Km. Nell’equazione, il primo termine è dovuto al solfato di magnesio, il secondo ed il terzo all’acido borico ed infine la costante è dovuta all’acqua [9]. In figura 2.2 è mostrato l’andamento grafico dell’attenuazione in funzione della frequenza.
Figura 2.2 Legge di Thorp.
Per valutare l’attenuazione, bisogna moltiplicare per la distanza espressa in km:
( ) ' ( )
Pagina 20
2.4 Effetto di curvatura dei raggi
Per introdurre il problema della curvatura dei raggi, all’interno dell’oceano, si supponga inizialmente un mezzo a strati orizzontali, dove ogni strato è caratterizzato dalla costante di propagazione k . L’onda si propaga lungo il piano (x,z), dove z rappresenta la quota. k
Figura 2.3 Mezzo stratificato.
All’interfaccia tra due strati, si verifica il fenomeno della rifrazione, e il legame tra l’angolo di incidenza e l’angolo rifratto è dato dalla legge di Snell. La figura 2.3 ne illustra il fenomeno.
Tra il primo ed il secondo strato:
1cos 1 2cos 2
k k
(2.4)
Pagina 21
2cos 2 3cos 3
k k
(2.5)
Facendo tendere a zero lo spessore degli strati, si ottiene che
z è una funzione continua della quota, e si può scrivere la seguente equazione:
1 cos
1
2 cos
2k z z k z z
(2.6)
Da questa equazione, si evince che per calcolare l’inclinazione finale
z2 nota quella iniziale
z1 , non occorre conoscere l’andamento della velocità del suono lungo il percorso, ma semplicemente quella iniziale e quella finale:
2
1 2 1 arccos k z cos z z k z (2.7)
Osservando la figura 2.3 si nota che per un mezzo stratificato vale la relazione:
cot i r z
(2.8)
Ritornando ora all’ipotesi che c z
è una funzione continua, la relazione diventa: r cot
zz
, e
la lunghezza del raggio curvilineo si può ottenere attraverso il seguente integrale:
1
0 cot z z r z
z dz(2.9)
A questo punto vediamo come si fa per costruire il tracciato di un raggio acustico, noto il profilo della velocità del suono.
Pagina 22
Si parte dalle equazione di Helmholtz in coordinate cartesiane x( , , )x y z :
2 2 0 2 p p c x x x(2.10)
Dove x è la posizione della sorgente. Si suppone una soluzione del tipo 0
0 i x j j j A p e i
x x ,nota come serie dei raggi. Sostituendo l’espressione nell’equazione di Helmholtz, eguagliando i termini dello stesso ordine e trascurando tutti i termini dalla serie dei raggi ad eccezione del primo (approssimazione per le alte frequenze), si ottengono le seguenti espressioni:
2 2 2
: O c x(2.11)
2 0 0 : 2 0 O A A (2.12)
1
2 2 1 : 2 , 1, 2,.. j j j j O A A A j(2.13)
La prima espressione, rappresenta l’equazione di eikonal (in cui
è un vettore perpendicolare al fronte d’onda) e la soluzione permette di calcolare la traiettoria dei raggi, mentre le altre sono note come equazioni del trasporto e si possono sfruttare per il calcolo dell’intensità acustica associata a ciascun raggio.Ipotizzando un profilo della velocità del suono dipendente solo dalla quota, si ottiene che il problema ha simmetria cilindrica.
Parametrizzando opportunamente l’equazione di eikonal, si ottiene il seguente sistema di equazioni differenziali:
12 12 , , , dr dz d c d c c s c s ds ds ds c r ds c z (2.14)
Pagina 23
Non c’è la dipendenza dall’angolo, per motivi di simmetria. Il vettore tray c
s , s , rappresenta la tangente al raggio e il vettore nray c
s , s rappresenta la normale. In figura 2.4 sono mostrati i vettori, in coordinate cilindriche.Le condizioni iniziali da applicare per risolvere il sistema di equazioni (2.14), tenuto conto che 0, è l’inclinazione iniziale del raggio, sono le seguenti:
0
0 0 0 cos sin , , , 0 0 r r z z c c (2.15)
Tipicamente, per ottenere una soluzione al sistema di equazioni (2.14) e costruire la traiettoria dei raggi, si può procedere per via numerica, utilizzando il metodo dell’integrazione diretta oppure il metodo delle celle.
Pagina 24
2.5 Riflessione
Supponiamo di essere all’interfaccia tra due mezzi fluidi, caratterizzati da diversi valori di densità. Quello che succede, è che una parte dell’onda sarà riflessa, mentre l’altra si trasmette all’interno del secondo mezzo, ma subirà una deviazione (figura 2.5).
Figura 2.5 Legge di Snell.
La riflessione avviene nella direzione speculare, ovvero: i r 1, angoli di incidenza. La trasmissione invece obbedisce alla legge di Snell:
1
21 2
sin sin
, con 2 t (fig. 2.5).
I coefficienti di trasmissione V( )1 e riflessione W( )1 , dipendono dall’impedenza acustica dei due mezzi e si calcolano rispettivamente come segue:
2 2 1 1 1 2 1 2 2 1 1 1 2 1 cos cos ( ) cos cos ( ( ) c c V c c W V
(2.16)
Pagina 25
In particolare, nell’ipotesi di incidenza normale, il coefficiente di trasmissione è dato da:
2 2 1 1 2 1 1 2 2 1 1 2 1 ( 0) c c Z Z V c c Z Z
(2.17)
1Z eZ2, rappresentano rispettivamente le impedenze acustiche dei due mezzi.
Lo studio va trattato diversamente quando l’incidenza è tra un mezzo fluido e uno solido. Infatti, come noto dalle leggi della meccanica, i fluidi, in condizioni statiche, possono reagire soltanto agli sforzi normali alla loro superficie (onde di pressione), e non a sforzi tangenziali (onde di taglio), contrariamente a quanto avviene per i solidi. Poiché onde di pressione e onde di taglio hanno diverse velocità di propagazione, risulterà diverso anche l’angolo di trasmissione, e pertanto, nel secondo solido, ci saranno due onde trasmesse.
Figura 2.6 Interfaccia liquido-solido [5].
Nei mezzi solidi, la velocità delle onde di compressione è:
p
c
Pagina 26
La velocità delle onde di taglio risulta invece:
t
c
(2.19)
rappresenta la densità del mezzo,
e sono i coefficienti meccanici di Lamè. L’ipotesi da fare è che il mezzo solido, si possa considerare un mezzo elastico. All’interfaccia tra mezzo liquido e mezzo solido, vale la legge di Snell-Descartes:1 2 1 2 sin sin sin S S c c c
(2.20)
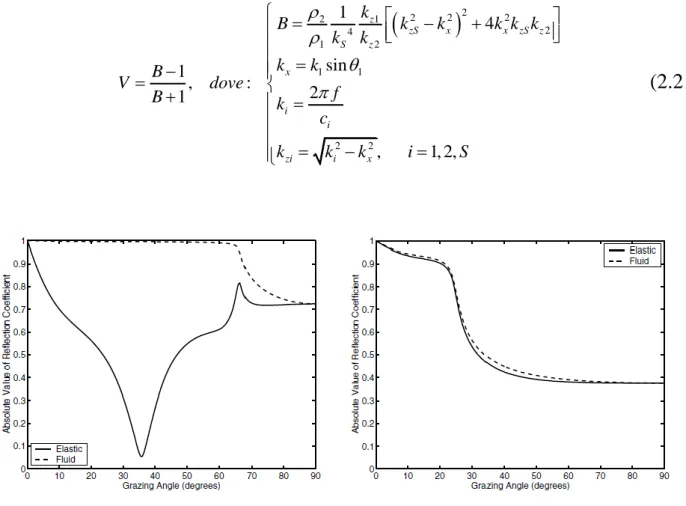
Il coefficiente di riflessione in funzione dell’angolo di incidenza assume la seguente espressione:
2 2
2 2 2 1 2 4 1 2 1 1 2 2 1 4 sin 1 , : 2 1 , 1, 2, z zS x x zS z S z x i i zi i x k B k k k k k k k k k B V dove f B k c k k k i S (2.21)
Figura 2.7 A sinistra il coefficiente di riflessione in funzione dell’angolo di radenza all’interfaccia tra acqua e un fondale roccioso, mentre a destra, l’interfaccia è tra acqua e un fondale sabbioso. Le curve tratteggiate, sono state ottenute considerando un’interfaccia fluido-fluido, mentre per le curve solide si è
Pagina 27
2.6 Scattering
Un effetto di particolare interesse nello studio dei sonar, è il fenomeno dello scattering (diffusione), che si verifica all’interfaccia con una superficie rugosa.
Grazie a questo fenomeno, è possibile individuare bersagli, stimarne le dimensioni e ricostruire delle immagini del fondale.
Figura 2.8 Scattering e riflessione.
I bersagli, si possono caratterizzare attraverso un parametro, che prende il nome di Target Strength (TS), ed è definito dalla seguente relazione:
10 log bs i I TS I
(2.22)
bsI è l’intensità dell’onda retro-scatterata, mentre Ii è l’intensità dell’onda incidente. Essa è legata alla pressione dell’onda acustica incidente p , attraverso la relazione: i
2 i i p I c , con densità, c
Pagina 28
velocità del suono.
L’equazione del sonar, quando si è in presenza di bersagli è data dalla seguente espressione:
40log 2
ELSL R R TS
(2.23)
Dove EL rappresenta l’Echo Level dell’eco ricevuto dal bersaglio e SL il Source Level della sorgente. La cross-section apparente A
i , con i angolo di incidenza rispetto alla normale al bersaglio, rappresenta l’area del bersaglio “vista” dal sonar. La potenza, che un bersaglio è in grado di intercettare è: Pi
i A
i IiLa funzione di scattering G
i, s
, con s angolo di scattering misurato rispetto alla normale al bersaglio, descrive la legge con cui il bersaglio diffonde il suono:
2 1 , i i s s i s m P I G R (2.24)
s sI è l’intensità acustica, ad una distanza unitaria dal bersaglio R1m (tipicamente 1m o 1yd). Un altro parametro di interesse, è la scattering cross section:
2, , [ ]
s i s A i G i s m
(2.25)
E la backscattering cross section, è quella riferita all’onda che torna indietro al sonar:
2, , [ ]
bs i s i i A i G i i m
Pagina 29
A questo punto passiamo a definire la Backscattering Strength di superficie:
2 1 10 log bs / s BS dB m A
(2.27)
Quindi la Backscattering Strength, può essere definita come la backscattering cross section, riferita ad un area unitaria (tipicamente 1 m oppure 1 2 yd ). La Backscattering Strength di superficie è 2 definita allo stesso modo della Target Strength (riferita a bersagli), ma si riferisce allo scattering dal fondale dell’oceano o dalla superficie del mare.
Quando si parla di Backscattering Strength di volume ci si riferisce allo scattering dovuto al particellato solido, alle bolle d’aria, ai branchi di pesci e altre cose, che si incontrano all’interno dell’ambiente marino. In questo caso, si parla di scattering per unità di volume, e la definizione è la seguente: 3 1 10 log bv / v BS dB m V
(2.28)
Considerando che una cella di risoluzione a terra (si faccia riferimento a figura 1.4) ha un’area pari a: 2sin cT A R
(2.29)
L’Echo Level, del segnale ricevuto da una cella di risoluzione del fondale, si ottiene applicando la seguente relazione:
30 log 2 10 log 2sin s cT EL SL R R BS (2.30)
Pagina 30
2.7 Legge di Lambert
Un caso particolare di superfici è quello per cui l’interfaccia è perfettamente scatterante, e quindi, il suono viene diffuso uniformemente su un angolo solido di 4
sr.La legge di scattering, per questi particolari diffusori è la seguente:
0 cos , s i s G (2.31)
Con 0, parametro che dipende dal materiale e s angolo di scattering. Dalla formula si evince che non c’è dipendenza dall’angolo di incidenza. Dalla (2.31) si ricava la scattering cross-section riferita ad un’area unitaria A : 1
0 01
( , ) cos cos cos
s i s A i s A i s
(2.32)
La backscattering cross-section: 2 0 1 ( ) cos bs i A i (2.33)
La Backscattering Strength, è nota come legge di Lambert, ed ha la seguente espressione:
0
( ) 10 logi 20 log cos i
BS
Pagina 31
2.8 Ombre acustiche
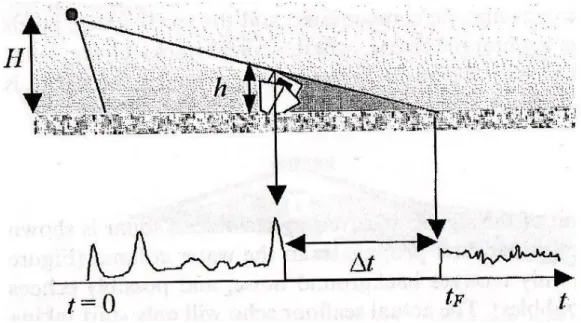
Il fenomeno delle ombre acustiche, si verifica quando tra un oggetto e il sonar, si trova un ostacolo. Nell’immagine di figura 2.9 si vede l’andamento della potenza ricevuta, in corrispondenza di una zona d’ombra.
Figura 2.9 Ombre acustiche.
Nota la lunghezza dell’ombra, è possibile calcolare l’altezza dell’ostacolo che l’ha generata:
F
h H
t t
(2.35)
Con H quota del Sonar, t “durata dell’ombra” ovvero l’intervallo temporale durante il quale il livello di potenza del segnale ricevuto risulta molto basso, h altezza dell’ostacolo e t istante in cui F la potenza si riporta a valori nominali.
Pagina 32
Capitolo 3 Descrizione del Software
Equation Section 3
3.1 Schema di principio del simulatore
Lo scopo di questo lavoro di tesi è la realizzazione di un simulatore di un Side Scan Sonar. Uno strumento di questo tipo può risultare utile ai fini di valutare le caratteristiche di sonar in commercio oppure come strumento di ricerca.
Figura 3.1 Simulatore per Side Scan Sonar [3].
Il simulatore è stato realizzato in MATLAB, e lo schema di principio a cui si è fatto riferimento, è quello mostrato in figura 3.1.
Pagina 33
I blocchi che costituiscono il simulatore sono i seguenti:
Generatore di fondale: Genera un fondale con una determinata rugosità, che tenga conto del particolare materiale di cui esso è composto. Al fondale può essere aggiunto un effetto a dune, tipico dei fondali sabbiosi e possono essere posizionati degli oggetti dalla geometria semplice.
Sonar: Prende in input parametri relativi al side scan sonar: Source Level, durata e frequenza dell’impulso, ampiezza angolare del fascio e portata massima del sonar (distanza massima rilevabile, che dipende dalla sensibilità del ricevitore) e genera in uscita una serie di parametri operativi.
Calcolo ombre: Individua i punti in ombra.
Calcolo angoli di incidenza e mesh: Scompone il fondale in triangolini, e per ciascuno di essi calcola area e angolo dell’onda incidente rispetto alla normale.
Calcolo Backscattering: A partire dagli angoli di incidenza, calcola in ciascun punto del fondale le Backscattering Strength e le pone a zero nei punti in ombra.
Rumore: Generatore di rumore gaussiano bianco. Esso viene moltiplicato per un fattore correttivo, che tiene conto dell’amplificazione dovuta al TVG (Time Variable Gain)
Equazione del Sonar: Per ciascun punto del fondale calcola l’intensità acustica retro-scatterata, facendo il prodotto tra Backscattering Strength e Area dei corrispondenti triangolini, e la riporta nel punto dove si trova il sonar.
Simula Movimento SSS: Scompone il terreno in celle di risoluzione e calcola quanta potenza, ciascuna di esse, scattera verso il sonar.
Immagine: L’immagine si ottiene sommando l’intensità ricevuta da ciascuna cella di risoluzione con il rumore termico.
Pagina 34
3.2 Modelli
Prima di entrare nello specifico della realizzazione del simulatore, vale la pena di soffermare l’attenzione sui vari modelli pertinenti sviluppati dai ricercatori.
Si può fare una distinzione in tre tipi (figura 3.2):
Figura 3.2 Organizzazione dei modelli, in base al livello di applicazione.
Modelli per l’ambiente marino: Scattering di volume, di superficie e del fondale. Tipicamente, attraverso questi modelli si arriva a calcolare la Backscattering Strength (BS), un parametro che poi serve per costruire il segnale di riverberazione.
Modelli per i segnali acustici: Propagazione dei raggi, e costruzione dei segnali di riverberazione e di rumore.
Modelli per la performance dei sonar: Signal processing del sistema in analisi. Ottenuto il segnale ricevuto, si simulano i vari blocchi del ricevitore fino ad ottenere l’immagine ricostruita.
Pagina 35
Un articolo pubblicato nel 2011 da Paul C. Etter [4], riporta un elenco di modelli e relative teorie, fino ad oggi sviluppati.
Per quanto riguarda i modelli teorici, si distinguono in:
Teoria della propagazione.
Riguarda la soluzione dell’equazione di Helmoltz in un mezzo con particolare profilo della velocità del suono.
Modelli sviluppati: - Parabolic equation - Ray theory
- Normal mode - Multipath expansion
- Fast field / wavenumber integration
Rumore
Riverberazione
Esistono due modelli teorici in letteratura, per generare il segnale di riverberazione: Cell scattering:
- L’oceano viene diviso in celle.
- Gli scatteratori sono distribuiti uniformemente nelle celle.
- Si fa una somma pesata dei contributi delle varie celle, associando a ciascuna una funzione di scattering incrementale, e quello che si ottiene è la densità spettrale di potenza del segnale di riverberazione ricevuto (vedi paragrafo 3.3).
- Si genera un segnale che ha quelle caratteristiche spettrali. Point scattering
Pagina 36
3.3 Approccio Cell Scattering
Per ottenere una realizzazione del segnale di riverberazione [7] e [8], è possibile ragionare nel dominio della frequenza, passando attraverso la densità spettrale di potenza (DSP).
L’inviluppo del segnale ricevuto, può essere immaginato come il filtraggio dell’inviluppo del segnale trasmesso attraverso un filtro tempo-variante, che tiene conto dell’ambiente:
2,
r t s E f t b t d
(3.1)
è la variabile ritardo di propagazione ed è proporzionale alla distanza R. E è l’energia contenuta t nell’impulso trasmesso, f t
è l’inviluppo del segnale trasmesso normalizzato in modo da risultare ad energia unitaria, mentre b t
, è un filtro tempo-variante che rappresenta l’ambiente marino.Figura 3.3 Scenario di riferimento per il modello di Hodgkiss [8].
Il segnale di riverberazione può essere visto come una realizzazione di un processo gaussiano complesso a media nulla caratterizzato da funzione di autocorrelazione Kb
tu,
, e dallaPagina 37 funzione di scattering:
2 , , j f b b S f K e d
(3.2)
L’approccio di tipo cell scattering, consiste nel dividere lo spazio in celle, come illustrato in figura 3.4.
L’ambiente viene dapprima diviso in sfere concentriche, distanziate l’una dall’altra da una cella di risoluzione in distanza (R=cT/2). Di seguito, lo spazio tra due sfere va a sua volta suddiviso in una griglia, dove ogni cella è compresa in un settore angolare di apertura orizzontale e di apertura verticale ed è identificata da una coppia di angoli
j, i
. Le dimensioni di ciascuna cella variano a seconda che si tratta di celle di superficie, di volume o di fondale.Figura 3.4 Divisione dello spazio in celle secondo il modello di Hodgkiss [8].
L’algoritmo per il calcolo della densità spettrale di potenza (DSP) del segnale ricevuto va eseguito in due step: prima bisogna calcolare la funzione di scattering (figura 3.5) e poi si passa al calcolo finale della DSP (figura 3.6).
Pagina 38
Per ogni cella, applicando l’equazione del sonar, si ottengono le intensità normalizzate scatterate verso il sonar. Scattering di superficie: , ˆ 10 log( ) 10 log{ ( )} 40 log( ) (2 ) ˆ ˆ 10 log{ ( , ) ( , )} 10 log{ / (2 )} i j s s T j S R j S A D R BS R R P P c R
(3.3)
Scattering di volume: , ˆ 10 log( ) 10 log{ ( ) ( )} 40 log( ) (2 ) ˆ ˆ 10 log{ ( , ) ( , )} 10 log{ / (2 )} i j V T j i R j i A R R R BS R R P P c R (3.4)
Scattering dal fondale:
, ˆ 10 log( ) 10 log{ ( )} 40 log( ) (2 ) ˆ ˆ 10 log{ ( , ) ( , )} 10 log{ / (2 )} i j B B T j B R j B A D R BS R R P P c R
(3.5)
I parametri D , s Re D rappresentano rispettivamente la dimensione in distanza, relativa alle B celle di superficie, di volume (R=cT/2) e di fondale.
I parametri PˆT e PˆR, tengono conto del diagramma di direttività dell’idrofono in trasmissione ed in ricezione.
s
BS ,BS e V BS , rappresentano le Backscattering Strength, rispettivamente di superficie, di volume B
Pagina 39
Attraverso la seguente convoluzione si ottiene la funzione di scattering incrementale:
^ ,
, , ˆ , , , i j i j i j D b S f p f f f (3.6)
, ^ , i j Df f , tiene conto dello spostamento doppler dovuto al moto relativo tra veicolo e cella (i,j).
, ,
i j
p f tiene conto del moto degli scatteratori all’interno della cella, per i quali si assume che abbiano una velocità che si possa modellare come una realizzazione di variabile aleatoria gaussiana. Attraverso le funzioni di scattering incrementali si possono calcolare le funzioni di scattering per la superficie, il volume e il fondale:
,
, , , , ˆ ˆ , i j i j ,b surface volume bottom b
i j
S f
A S f (3.7)
Figura 3.5 Calcolo delle funzioni di scattering [8]. In figura, per identificare la variabile ritardo di propagazione si utilizza
anziché. Nel testo abbiamo preferito questa notazione per evitare di farePagina 40
Se invece, si vuole ottenere semplicemente il livello di intensità ricevuta:
, , ,, ˆ
0, i j
b surface volume bottom
i j
K
A(3.8)
La densità spettrale di potenza del segnale di riverberazione si ottiene dalla convoluzione tra la densità spettrale di potenza dell’inviluppo complesso dello spettro del segnale trasmesso e la funzione di scattering:
,
,
r t f b S f E S f S f (3.9)
fS f è la densità spettrale di energia dell’inviluppo del segnale trasmesso normalizzato.
22 ( ) j ft f
S f
f t e dt(3.10)
Ottenuta la densità spettrale di energia, è possibile finalmente costruire una realizzazione del segnale di riverberazione nel dominio del tempo, da inserire in ingresso al ricevitore.
Pagina 41
All’interno del software realizzato per questo lavoro di tesi, non si è costruito il segnale di riverberazione, ma soltanto il livello di intensità ricevuto, sfruttando la (3.8).
Si è tenuto conto soltanto dell’eco proveniente dal fondale, che rappresenta la maggior parte del segnale ricevuto, perché il fascio è puntato verso il basso e quindi la riverberazione di volume e di superficie dipendono prevalentemente dai lobi laterali dell’idrofono.
Per quanto riguarda la costruzione delle celle, si è scelto la forma triangolare che consente la copertura di qualsiasi superficie senza buchi né sovrapposizioni.
Figura 3.7 A sinistra una vista dall’alto dello scenario del simulatore. A destra una vista perpendicolare alla direzione di propagazione del sonar. Tutte le variabili sono state nominate con la stessa notazione
utilizzata nel codice implementato in MATLAB.
3.4 Parametri di ingresso e approssimazioni
Nella realizzazione del simulatore si sono assunte particolari ipotesi di lavoro: Velocità del suono costante: c=1500m/s
Raggi rettilinei.
Diagramma di irradiazione costante all’interno degli angoli di apertura dell’idrofono e nullo al di fuori.
Non si è tenuto conto della riverberazione di volume, né di quella di superficie, ma solo di quella proveniente dal fondale.
Il rumore è solo termico (ipotesi molto realistica dato che al di sopra dei 100kHz, il rumore termico supera di gran lunga il rumore ambientale).
Pagina 42
Prima di lanciare una simulazione, vanno definiti i parametri del sonar e dell’ambiente, che sono i seguenti:
h, l’altezza rispetto al suolo a cui viaggia il sonar.
f0, la frequenza di lavoro (Hz)
T, la durata dell’impulso (sec)
Teta_I_grad, l’inclinazione rispetto all’asse z dell’idrofono (gradi)
Teta_EL_grad, l’angolo di elevazione del fascio irradiato dall’idrofono (gradi)
SL, Source Level (dB re 1uP @ 1m)
dx, è il passo di campionamento del fondale (m)
RMAX, distanza massima rilevabile, dipende dalla sensibilità del ricevitore (m)
INTER_PING è lo spostamento, in multipli interi del passo di campionamento, che il sonar compie tra un impulso e il successivo.
Figura 3.8 In nero il segnale trasmesso, mentre in blu l’eco ricevuto. I segnali sono rappresentati in banda base.
K1, posizione del parallelepipedo (indice di tile1)
K2, posizione del semicilindro (indice di tile)
(Xpar, Ypar), coordinare del parallelepipedo all’interno del tile, tenendo presente che l’origine degli assi è al centro del tile (m).
Lpar, lato del quadrato di base del parallelepipedo (m).
Hpar, altezza del parallelepipedo (m).
(Xcilindro,Ycilindro), coordinate del semicilindro all’interno del tile (m).
1 Tile: è un termine inglese che significa mattonella. Per ottenere un’agevole manipolazione del fondale è convenuto
Pagina 43
Lcilindro, lunghezza del semicilindro
Rcilindro, Raggio del semicilindro
alfa1, rotazione del parallelepipedo rispetto agli assi del terreno (gradi).
alfa2, rotazione del semicilindro rispetto agli assi del terreno (gradi).
A partire dagli input, il file parametri.m, genera una serie di parametri derivati, attraverso le formule caratteristiche del sonar ad apertura reale:
I0: intensità acustica alla distanza di un metro dalla sorgente (W/ )
Tr: Tempo tra un impulso e il successivo (sec)
v: velocità a cui viaggia il sonar (m/s)
Rmin, distanza minima tra sonar e impronta a terra (m)
Rmax, distanza massima tra sonar e impronta a terra (m)
y_min, distanza minima tra proiezione a terra del sonar e impronta acustica (m)
y_max, distanza massima tra proiezione a terra del sonar e impronta acustica (m)
DR, dimensione di una cella di risoluzione in distanza del sonar
SWATH, lunghezza dell’impronta a terra
D, durata dell’eco
Vmax, la velocità massima a cui si può viaggiare senza lasciare buchi.
Al termine dell’esecuzione, il file parametri.m genera un file parametri_sonar.mat in cui vengono salvati tutti i dati.
Pagina 44
3.5 Generazione della rugosità del fondale
La rugosità del fondale dell’oceano, può essere vista come la realizzazione di un processo bidimensionale [12], caratterizzato attraverso la densità spettrale di potenza (DSP), nel dominio delle frequenze spaziali.
La DSP del fondale (Appendice A) può essere descritta attraverso la seguente formula:
(F Fx, y) F
(3.11)
I parametri γ, e la deviazione standard (RMS) della rugosità dipendono dal materiale di cui è composto il fondale e nella letteratura compaiono dati sperimentali ottenuti attraverso campagne di misure. Per maggiori dettagli, riguardanti lo studio delle statistiche del fondale, si rimanda all’appendice A.
La risoluzione in distanzaR, per un sonar che lavora a frequenze superiori ai 100 KHz, è dell’ordine di qualche centimetro, le dimensioni tipiche di un granello di sabbia variano tipicamente da qualche centesimo di millimetro a pochi millimetri. Il singolo granello, a sua volta, è caratterizzato da una superficie rugosa e porosa. Di questi fattori si tiene conto nel calcolo delle
Figura 3.9 Nell’immagine un campione di un fondale sabbioso, tendente al pietroso. Da Monterosso (Liguria)
Pagina 45
curve della Backscattering Strength, che rappresentano la legge di scattering del particolare materiale. Nel nostro caso, abbiamo tralasciato questo studio, e ci siamo affidati a risultati ottenuti per via sperimentale (appendice B).
Il simulatore, prevede la possibilità di scegliere tra un fondale sabbioso, roccioso oppure ghiaioso. Il fondale viene generato filtrando una realizzazione di processo gaussiano bianco, di varianza unitaria, attraverso un filtro del tipo:
( ) ( )
H K S K
(3.12)
Dove S(K) è la DSP del fondale e K è il modulo del vettore d’onda spaziale (vedi Appendice A). Per ottenere una realizzazione nel dominio dello spazio, si è sfruttato l’algoritmo FFT (Fast Fourier Transform).
Quello che si ottiene è una matrice h di dimensioni NxN, e gli elementi sono campioni del fondale.
N=8192 è la più grande potenza di due, per cui un sistema di calcolo con 8 Gbyte di RAM, è in grado di eseguire un algoritmo di FFT.
La matrice ottenuta, va modificata in modo tale che il valor medio risulti nullo e la deviazione standard (RMS), risulti quella del materiale che si vuole ottenere:
>> h=h-mean(mean(h)); % sottrae ad h una stima del valor medio
>> VarStima=sum(sum(h.^2))/N^2; % stima della varianza
>> h=h*RMS/sqrt(VarStima);
Si è scelto un passo di campionamento pari a 3 mm, e quindi h rappresenta un blocco di fondale quadrato, di lato 24.57 metri. Tale scelta è un buon compromesso tra l’esigenza d’utilizzare parametri di portata tipici e mole di calcoli da far eseguire al processore.
Pagina 46
Figura 3.10 Un campione di fondale di 30 cm X 30 cm ottenuto attraverso la tecnica descritta in questo paragrafo.
Pagina 47
3.6 Batimetria
La batimetria, è una funzione che rappresenta l’altezza del fondale, in funzione degli assi cartesiani (x,y). Si è scelto di riprodurre il tipico effetto sali e scendi della sabbia. Tale effetto si è ottenuto, filtrando una realizzazione di processo gaussiano attraverso un filtro bidimensionale circolare. L’effetto è quello di riprodurre delle oscillazione aleatorie a frequenze e ampiezze dell’ordine di qualche decina di centimetri.
Sommando la matrice della batimetria e quella della rugosità, si ottiene il fondale, che dovrà poi essere ricostruito simulando il passaggio del sonar.
Il fondale così ottenuto è rappresentato da una matrice di 8192 X 8192 campioni. Le dimensioni sono pari a 24.57m X 24.57m.
Pagina 48
3.7
Posizionamento di oggetti sul fondale
Costruito il fondale, si procede a scomporre la matrice in 16 sottomatrici di 2048 X 2048 elementi denominati “tile”. Tale operazione viene fatta, per evitare di caricare eccessivamente la memoria RAM nelle successive fasi di calcolo. Infine, si posizionano due oggetti sul fondale: per le nostre simulazioni si sono utilizzati, un parallelepipedo di dimensioni 2m X 2m X 1m e un semicilindro di 90 cm di raggio e 3,2 metri di lunghezza.
Nella fase d’impostazione dei parametri è possibile decidere per ciascun oggetto, a quale tile farlo appartenere e come ruotarlo rispetto agli assi cartesiani.
L’inserimento degli oggetti avviene, sostituendo nella matrice del fondale, le quote che si riferiscono agli oggetti.
Pagina 49
3.8 Backscattering
Una volta costruito il fondale, si parte con il calcolo della backscattering cross-section bs per ciascun punto del fondale. Questa operazione è eseguita dal file SCATTERING.m, che scompone il terreno in cellette di forma triangolari (figura 3.13) e per ciascuna calcola l’area e l’angolo di incidenza dell’onda. Di seguito, passa al calcolo delle Backscattering Strength (BS), utilizzando le curve mostrate in figura 3.16 e descritte nell’appendice B.
Figura 3.13 Scomposizione del fondale in cellette triangolari.
Per motivi di semplicità, si fa un’approssimazione a raggi perpendicolari, ovvero, si assume che i raggi viaggino sempre perpendicolarmente alla direzione di avanzamento del sonar. Questa approssimazione è possibile perché l’angolo di apertura dei side scan sonar è molto stretto, e quindi si commette un errore massimo pari a az/ 2 , che è dell’ordine di una frazione di grado.
L’algoritmo è suddiviso in due fasi. Nella prima fase, si calcolano aree e angoli di incidenza per tutti i triangoli rivolti verso il basso (fig.3.13), nella seconda, si ripete l’operazione per quelli rivolti verso l’alto.
Pagina 50
Sia P la posizione del sonar e P0, P1e P2 i vertici del triangolino (figura 3.14), il coseno dell’angolo di incidenza alla cella è dato dal prodotto scalare tra il versore normale alla superficie del triangolinoˆv e il versore 0
0 ˆ || || P P r P P : ˆ ˆ cos v r
(3.13)
La normale alla superficie del triangolino è calcolata attraverso il seguente prodotto vettoriale:
00 22
00 11
ˆ P P P P v P P P P(3.14)
Pagina 51
Figura 3.15 Nell’immagine, ogni punto rappresenta l’angolo di incidenza riferito ai triangolini rivolti verso l’alto (fig. 3.13) e calcolato sfruttando l’approssimazione a raggi perpendicolari.
L’area dei triangolini, è invece calcolata sfruttando la formula di Erone.
( )( )( )
A p p a p b p c
(3.15)
Dove p è il semiperimetro e a, b e c sono i lati del triangolo.
A questo punto, si passa al calcolo della matrice delle Backscattering Strength (BS) a partire dalla matrice degli angoli di incidenza, utilizzando la funzione contenuta nel file makeFun_heuristical_backscattering.m, descritta nell’appendice B e rappresentata in figura 3.16.
Per quanto riguarda gli oggetti, il calcolo delle Backscattering Strength (BS) viene eseguito in maniera diversa. Si assume che essi siano superfici Lambertiane e quindi si sfrutta la (2.34).
Pagina 52
Figura 3.16 Il grafico mostra le curve in scala logaritmica della Backscattering Strength (10*log10(BS) in funzione dell’angolo di incidenza. La curva blu, rappresenta un fondale roccioso, la curva verde un
fondale sabbioso e infine la curva rossa un fondale fangoso.
La backscattering cross-section (figura 3.17) riferita al campione (m,n) di fondale (2.27), si ottiene attraverso il prodotto tra l’area dei corrispondenti triangolini e le relative Backscattering Strength (BS) riportate in scala lineare:
( , ) ( , ) ( , ) ( , ) ( , ) ( , )
bs m n Adown m n BSdown m n Aup m n BSup m n Mask m n
(3.16)
( , )
down
A m n è l’area del triangolino rivolto verso il basso (fig 3.13) in corrispondenza del campione (m,n) del fondale.
( , )
up
A m n è l’area del triangolino rivolto verso l’alto (fig.3.13) in corrispondenza del campione (m,n) del fondale.
( , )
down
BS m n e BSup( , )m n sono le corrispondenti Backscattering Strength riportate in scala lineare. Mask(m,n),è una funzione che vale 1 in corrispondenza dei punti visibili e 0 in corrispondenza di quelli in ombra.
Pagina 53
Figura 3.17 Backscattering cross-section del fondale ottenuta attraverso la (3.13).
3.9 Algoritmo di individuazione dei punti in ombra
Anche qui, si applica l’approssimazione a raggi perpendicolari, descritta nel paragrafo precedente. L’algoritmo di individuazione dei punti in ombra, si riduce ad un problema bidimensionale.
L’algoritmo, passa uno alla volta i vettori della matrice del fondale h(k,:) alla funzione shadow_mask.
Il sonar, si trova nell’origine dell’asse y, e a quota h_sonar.
L’algoritmo opera come segue:
Passo 0: individua la retta y passante per h(1) e il sonar. (inizializzazione)
Passo k: fa il confronto tra la retta y e il punto h(k). Se y(k)<h(k), allora il punto non è in ombra e quindi il vettore y viene sostituito con la retta passante per h(k) e il sonar. Se y(k)>h(k), allora il punto è in ombra, e la retta y non viene modificata.
Pagina 54
Figura 3.18 La figura mostra come opera l’algoritmo per l’individuazione delle ombre. h(2)>y(2) quindi visibile e la retta va modificata, h(3)>y(3) quindi visibile e la retta va modificata, h(4)>y(4) quindi visibile
e la retta va modificata, y(5)>h(5) quindi in ombra e la retta NON va modificata, y(6)>h(6) quindi in ombra e la retta NON va modificata, e così via…
Alla fine della procedura, si ottiene una matrice mask, che contiene 0 in corrispondenza dei punti in ombra e 1 in corrispondenza dei punti visibili.
La matrice è utilizzata all’interno della (3.13).
Pagina 55
3.10 Impronta a terra e divisione in celle di risoluzione
Il file TERRENO_ILLUMINATO.mat, crea a partire dalla matrice dei parametri del sonar, un vettore delle celle di risoluzione x e una matrice che rappresenta l’impronta a terra z.
Figura 3.20 Impronta a terra
La matrice z, contiene 1 in corrispondenza dei punti insonorizzati e 0 altrove, ed ha dimensioni di 256X8192. Le dimensioni sono state scelte, in maniera tale che l’impronta, anche nella peggiore delle ipotesi, non venga tagliata (256dxmax(R xmax).
Il vettore x, di 8192 elementi, va interpretato in questo modo: l’elemento x(i) rappresenta l’indice di cella riferito alla colonna i-esima della matrice del fondale h(:,i).
Pagina 56
3.11 Simulazione del movimento del sonar
La scansione del sonar è simulata, isolando di volta in volta, un blocco dalla matrice delle backscattering cross-section QQ, di dimensioni 256 X 8192. La matrice che si ottiene, viene moltiplica punto per punto, per la matrice z che rappresenta l’impronta a terra, in modo da isolare i punti insonorizzati.
Il secondo step, è quello di sommare tra di loro, tutte le backscattering cross-section appartenenti alla k-esima cella di risoluzione in distanza e quello che si ottiene rappresenta l’intensità acustica normalizzata ed equalizzata SIGMA(i,k), ricevuta dalla k-esima cella e relativa all’i-esimo impulso, ovvero un pixel dell’immagine.
Pagina 57
Il sonar, viaggia ad una velocità tale che, lo spostamento compiuto tra due impulsi consecutivi risulti un multiplo intero L del passo di campionamento. Considerato che T è il tempo che R intercorre tra due impulsi, che v è la velocità a cui viaggia il sonar e dx è il passo di campionamento, si ha che: R T v L dx
(3.17)
Quindi:Al primo impulso si isolano le prime 256 righe della matrice: QQ(1:256,:)
Al k-esimo impulso si isoleranno 256 righe a partire dalla

![Figura 1.5 Tipi di impulsi [2].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7623214.116437/13.892.270.636.580.878/figura-tipi-di-impulsi.webp)
![Figura 1.6 Schema a blocchi [2] di un sistema sonar generico. Alcuni componenti dello schema potrebbero essere disposti in ordine diverso](https://thumb-eu.123doks.com/thumbv2/123dokorg/7623214.116437/14.892.92.804.222.526/figura-schema-blocchi-sistema-generico-componenti-potrebbero-disposti.webp)

![Figura 3.4 Divisione dello spazio in celle secondo il modello di Hodgkiss [8].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7623214.116437/39.892.141.732.611.878/figura-divisione-spazio-celle-secondo-modello-hodgkiss.webp)
![Figura 3.5 Calcolo delle funzioni di scattering [8]. In figura, per identificare la variabile ritardo di propagazione si utilizza anziché ](https://thumb-eu.123doks.com/thumbv2/123dokorg/7623214.116437/41.892.206.648.480.1053/calcolo-funzioni-scattering-identificare-variabile-propagazione-utilizza-anziché.webp)
