Universit`
a di Pisa
Scuola di Dottorato in Ingegneria ”Leonardo da Vinci”
Corso di Dottorato di Ricerca in
Veicoli Terrestri e Sistemi di Trasporto
Tesi di Dottorato di Ricerca
Multibody analysis of a new three
wheeled vehicle
CANDIDATO
Ing. Francesco Bartaloni TUTORI
Prof. Ing. Massimo Guiggiani Ing. Francesco Frendo
Abstract
This work is aimed to analyze the dynamic behaviour of a new three wheeled motorcycle introduced in the market by Piaggio & C. S.p.A. in 2006. This new tilting vehicle, shows the peculiarity to have two front wheels that increase the safety feeling. The dynamic behaviour of conventional motor-cycles is a well established subject, on the contrary, there is no technical lit-erature about this of kind tilting vehicles. In order to study the dynamics of the vehicle, a multibody model was built in MSC-ADAMS°c
environment, furthermore handling analyses and a three post rig test were performed. Due the complexity of the front design, a kinematic analysis of the front tilting system was performed. To assure the stability of the motorcycle, two virtual drivers were developed. The data obtained from simulations were compared with results obtained with a mathematical model and ex-perimental data.
Sommario
Il lavoro svolto ha lo scopo di analizzare il comportamento dinamico di un nuovo scooter lanciato sul mercato da Piaggio & C. nel 2006. Tale veicolo, in grado di basculare, mostra la singolare caratteristica di avere due ruote anteriori che incrementano la sensazione di sicurezza di guida. Mentre il comportamento dinamico dei motocicli convenzionali `e un soggetto ben investigato, al contrario, non esiste letteratura tecnica su questo tipo di veicoli basculanti. Al fine di studiare la dinamica di tale veicolo `e stato implementato un modello multibody in ambiente MSC-ADAMS°c
dove si sono simulate sia analisi di handling, sia prove al banco vibrante. Inoltre si `e condotta un’analisi cinematica del sistema anteriore basculante. Al fine di mantenere la stabilit`a del motociclo sono stati sviluppati due piloti virtuali in grado di controllare il motociclo. I dati ottenuti dalle simulazioni sono stati confrontati con quelli provenienti da simulazioni condotte con un modello matematico e con i risultati sperimentali.
Ringraziamenti
Alla fine di questo corso di dottorato numerosi sono i ringraziamenti che voglio fare. Primi fra tutti vorrei ringraziare i miei genitori che mi hanno incoraggiato, spero di averli ripagati di tutti i loro sforzi fatti per me. Un ringraziamento doveroso va al Prof. Guiggiani e all’ Ing. Frendo per tutto quello che mi hanno insegnato , delle opportunit`a che mi hanno dato, per le esperienze condivise. Non possono mancare i miei colleghi di dot-torato con cui ho condiviso questi anni: in particolare Antonio Sponziello e Giordano Greco.
Ringrazio l’Ing. Di Tanna e l’Ing. Santucci di Piaggio & C. S.p.A per l’opportunit`a che mi hanno dato di collaborare ad un loro progetto. Du-rante la prima parte di dottorato `e stato stimolante collaborare con il reparto di Advance Engineering del Technical Center Europe della Bridge-stone.
Un particolare ringraziamento va a tutti gli studenti e i tesisti che ho avuto modo di conoscere durante il percorso del dottorato.
Contents
1 Introduction 11
1.1 The tilting front system . . . 13
1.2 Why two front wheels? . . . 15
2 Multibody model developed 19 2.1 Final multibody model . . . 20
2.1.1 Description of the multibody model forecarriage . . 20
2.1.2 Description of the driver-frame system of multibody model . . . 23
2.1.3 Description of the multibody model rear suspension 26 2.2 Standard motorscooter multibody model . . . 26
2.3 Analytical model . . . 30
3 Tire models 33 3.1 Tire model used in handling analysis . . . 33
3.1.1 The tire magic formula: basic formulation . . . 34
3.1.2 The PAC-MC Tire model . . . 37
3.2 Three post rig tire model . . . 43
4 Drivers developed 49 4.0.1 Steering speed driver . . . 49
5 Kinematic analysis of the front tilting system 61 5.1 Description of the analysis performed . . . 61
5.2 Results obtained . . . 63
5.3 Conclusions . . . 63
6 Three post rig analysis 67
6.1 Analysis procedure . . . 68
6.2 Results . . . 74
6.3 Conclusions . . . 78
7 Handling simulations 79
7.1 Steering pad test . . . 80
7.1.1 Mp3 multibody model versus standard two wheeled motorscooter . . . 82
7.1.2 Mp3 multibody model versus analytical model . . . 84
7.1.3 Multibody model data versus experimental data . . 85
7.2 Lane change test . . . 89
7.3 Slalom test: multibody model data versus experimental data 92
7.4 Loss of grip test . . . 95
7.5 Conclusions . . . 97
8 Conclusions 99
List of main symbols 101
A Sintesi in italiano
Chapter 1
Introduction
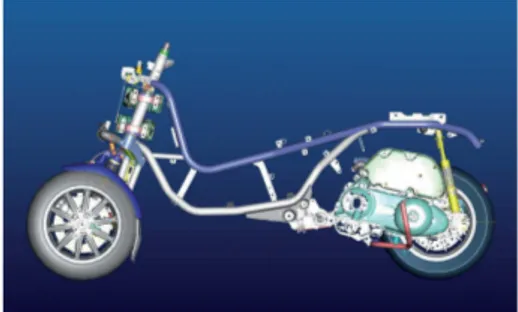
The purpose of this work was to analyze the dynamic behaviour of a new three wheeled motorscooter. Piaggio & C. S.p.A. is an Italian leader in the manufacture of motorscooters and which introduced a new titling vehicle called Mp3 (Fig. 1.1) to the market in 2006. This vehicle is derived from a common motorscooter, but it shows the singular peculiarity to have two front wheels.
The dynamic behaviour of conventional motorcycles is a well established subject (see for examples [1-5]), on the contrary, there is no technical liter-ature about this kind of tilting vehicle.
In order to study the dynamic behaviour of the vehicle, the following analyses were performed:
• a front suspension kinematic analysis: the complexity of the front
tilting system requires more study to characterize its kinematics and the influence it has on the overall dynamics. In particular, the dis-placements of the two front contact points with variation of roll and steering angles were analyzed. This analysis was carried out to es-tablish the possible influences the movement of the two front contact points can have on the Mp3’s dynamics;
12 1. Introduction
Figure 1.1: New three-wheeled motorscooter by Piaggio
using common maneuvers, some differences in the dynamics of the Mp3 and traditional scooters were revealed. Furthermore the data obtained were compared with experimental data in order to verify the multibody model;
• a three post rig analysis, simulating the response on a several road
profiles.
The data obtained from these analyses where compare with data ob-tained from:
• experimentation: these data were provided by Piaggio & C. S.p.A. In
particular it was possible to analyze how closely the multibody model simulated the dynamics of the real motorscooter by comparison of these two kinds of data;
• a analytical model: the Mp3’s dynamic behaviour was also studied
1.1 The tilting front system 13
environment. Data obtained from the two models were compared in order to verify each other;
• a common motorscooter multibody model. This model is based on
a Piaggio & C. S.p.A traditional motorscooter. It was possible to identify the differences the two models and analyze the the benefits and disadvantages of two front wheels.
The multibody model was developed in the MSC-ADAMS°c
environ-ment: this is a commercial application which is able to integrate the equa-tions of motion of a system developed in its environment. Another im-portant aspect of this work was the development of two virtual drivers applying a different control strategies. The drivers were employed essen-tially in handling analyses where the vehicle has to follow a established trajectory without falling.
Figure 1.2: CAD drawing of the Mp3 front assembly
1.1
The tilting front system
The particular Mp3 front kinematic design allows the motorcycle to tilt: the Mp3 can roll like a traditional motorscooter, so it can be driven like a
14 1. Introduction
Figure 1.3: Mp3 CAD draw-ing: front view
Figure 1.4: Mp3 CAD draw-ing: lateral view
standard motorcycle. The driver does has not to change style of driving, but the two front wheels increase the feeling of safety . Figs. 1.5 and 1.6 show that substantially there is no substantial difference between the cor-nering equilibrium of a traditional motorcycle and that of the Mp3. In fact the total lateral force of the tires must be the same in both cases shown (if the radius of the trajectory and forward speed are the same).
The front tilting system has four components: two horizontal arms and two vertical links. While the horizontal arms always remain in an horizon-tal position, the two vertical links tilt at an angle that is the same as he roll of the frame. Fig. 1.2 shows how the system works while cornering: the two vertical links remain parallel to the vehicle symmetry plane. Both horizontal arms, and vertical links are connected to each other, with revo-lute joints having an axis inclined by 13 degrees respect to the plane of the vertical and horizontal arms.
The steering system is integrated with the front suspension assembly. In particular, there is a 1 : 1 ratio between the handlebar steering angle and the wheel steering angle.
1.2 Why two front wheels? 15
Figure 1.5: Equilibrium of a standard motorcycle
Figure 1.6: Equilibrium of the Mp3
1.2
Why two front wheels?
In a preliminary analysis, we consider that two front wheels offer these benefits:
• in usual city driving there are many factors that determinate the loss
of equilibrium of a motorcycle: road lines (especially on rainy days), road bumps, rails, small objects in the road, etc...Two front wheels re-duce the probability that these negative factors nullify the adherence of the forecarriage completely, given that one of the two front wheels mantain adhesion even the other doesn’t, and thus assures stability.
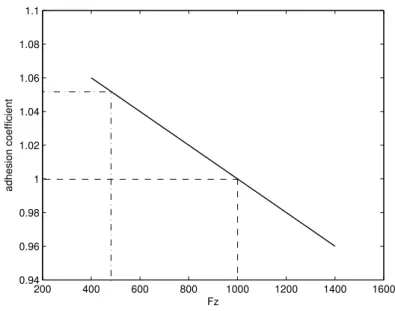
• According to the Pacejka Magic formula, the coefficient of adhesion
varies with the tire vertical load. The longitudinal adhesion coefficient of the tire can be described by this formula:
µx= p1+ p2
(Fz− Fz0)
Fz0
(1.1) Where:
– Fz is the tire vertical load;
16 1. Introduction 200 400 600 800 1000 1200 1400 1600 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1 Fz adhesion coefficient
Figure 1.7: Coefficient of adhesion versus tire vertical load. Parameters: p1= 1, p2 = −0.1, Fz0= 1000N , Fz=500 and 1000N
– p1 and p2 are experimental parameters.
Specifically, as the vertical load increases, the coefficient of adhesion decreases because parameter p2 is negative. Figure 1.7 shows the
re-lationship between the coefficient of adhesion and vertical load. The coefficient of adhesion as a function of vertical load is calculated from equation 1.1, with parameters p1 and p2 established by
experimenta-tion with tires mounted on the Mp3. The dotted lines refer to two different conditions: one with a vertical load of 1000 N, the other of 500 N tire load. As we can be seen, the tire with the higher vertical load, has a coefficient of adhesion lower than the tire with a 500 N vertical load. Now considering the Mp3 tilting system, this design
assures that the vertical load acting on forecarriage of the vehicle, is divided equally between the two wheels: thus having the tire vertical load halved respect to a equivalent traditional motorscooter. So each front wheel of the Mp3 has a coefficient of adhesion 4-5% higher re-spect to a standard motorscooter given the same total front vertical load.