Indice
Sommario iii Abstract iv 1 Introduzione 1 1.1 La Formula SAE . . . 1 1.2 ET3: Elettronica . . . 31.2.1 La centralina del motore . . . 5
1.2.2 La centralina del cambio . . . 7
1.2.3 L’unità di controllo del cruscotto . . . 9
1.2.4 Il sistema di acquisizione dati . . . 12
1.2.5 Il display. . . 13
1.2.6 La sensoristica . . . 14
1.3 Organizzazione del Testo . . . 17
2 La Telemetria 19 2.1 Origini e storia . . . 19
2.2 Settori di applicazione . . . 21
2.3 Stato dell’arte . . . 23
2.4 La telemetria dell’ ET3 . . . 31
3 L’Hardware 36 3.1 Architettura del sistema . . . 36
3.2.1 Il microcontrollore . . . 39 3.2.2 La radio . . . 43 3.2.3 La sezione di alimentazione . . . 49 3.3 Schema Completo . . . 51 3.4 Realizzazione PCB . . . 54 3.5 WINGS 3D . . . 57 4 Il firmware 59 4.1 Firmware unità PC . . . 59 4.2 Il pacchetto dati. . . 66 4.3 L’interfaccia CAN. . . 69
4.4 Firmware unità di bordo . . . 74
5 Il software 78 5.1 E-Team Telemetry . . . 78 5.2 Architettura interna . . . 84 6 Test e conclusioni 85 6.1 Test . . . 85 6.2 Conclusioni . . . 87 A Appendice 89 A.1 Schema elettrico. . . 89
Sommario
Il lavoro di tesi si è concentrato sulla progettazione, e poi sulla successi-va realizzazione di un sistema di telemetria per la vettura di Formula SAE dell’Università di Pisa. L’auto, che ad oggi è alla sua terza evoluzione, si chia-ma ET3, ed è stata realizzata ad opera dall’E-Team Squadra Corse (http: //www.eteamsquadracorse.it).
La telemetria si compone sostanzialmente di due unità radio, una a bordo della vettura, l’altra ai box collegata al PC. L’unità all’interno dell’auto si occupa principalmente di acquisire e gestire le informazioni inviate sulla rete CAN dall’elettronica della vettura. Questa è costituita dalla centralina del motore, dalla centralina del cambio, dal cruscotto, dal modulo di acquisizione dati, e dai vari sensori distribuiti su tutta la macchina. Le informazioni della macchina, elaborate mediante un microcontrollore, sono trasferite per mezzo di una connessione senza fili all’unità remota. Questa indirizza i dati al PC, che li visualizza su schermo tramite una elementare interfaccia LabVIEWr. La telemetria gestisce, inoltre, un flusso di dati bidirezionale. L’utente remoto è, quindi, in grado di agire da terminale su alcuni parametri della vettura (ad esempio il numero di marcia e le impostazioni del cambio).
Lo stato della macchina viene monitorato in tempo reale, e ciò rende pos-sibile l’individuazione istantanea di guasti e malfunzionamenti a grande di-stanza. Il range di copertura si estende, infatti, su un raggio di un chilometro circa. La tesi si conclude con la descrizione dei risultati ottenuti in fase di test all’aeroporto Galileo Galilei di Pisa, e alla successiva esperienza di gara nel circuito di Hockenheim.
Abstract
This graduation thesis describes the design of a telemetry system for the Pisa University Formula SAE racing car. The vehicle, called ET3, is made by E-Team Squadra Corse, and actually it is the third evolution of the car.
The telemetry consists essentially of two radio units, one into the car, the other (remote unit) connected to the PC. The module inside the car acquires and processes information sent over the CAN bus from other electronic devices. These are the engine control unit, the gear control unit, the dashboard unit, the data logger, as well as other sensors distributed throughout the car. The information is processed by a microcontroller, and is transferred to the remote unit through a wireless connection. The remote unit redirects incoming data to the PC. Data is showed on PC display by a custom-made LabVIEWr interface. The telemetry system is also able to manage bidirectional data, so remote user can change some parameters of the car from the terminal (for example gear number and gear settings).
The vehicle status is monitored in real time, so instant detection of faults and failures is possible over distance. The radios cover a range about one kilometer.
Finally, the thesis concludes with a description of the risults obtained du-ring the test sessions at the Pisa Airport Galileo Galilei, and at the Formula Student event at Hockenheim ring.
Capitolo 1
Introduzione
Con questo capitolo si vuole introdurre il lettore al lavoro di tesi e a quello che è stato il suo divenire. Dopo una breve presentazione sulla Formula SAE, nella seconda sezione del capitolo vengono analizzati brevemente i dispositivi che costituiscono, insieme alla telemetria, l’elettronica a bordo della vettura. Infine, nella terza ed ultima sezione, si introduce il lettore all’organizzazione del testo.
1.1
La Formula SAE
La Formula SAE (Society of Automotive Engineers) è una competizione a livello internazionale, che vede gareggiare le squadre universitarie del mondo con auto da corsa di propria produzione (in Figura 1.1 è mostrata la pano-ramica dei partecipanti alla Formula Student Germany 2010). Gli studenti progettano, costruiscono, e testano il prototipo di una monoposto, seguendo le rigide direttive del regolamento. Quest’ultimo è atto soprattutto a garantire la sicurezza, ed a limitare le prestazioni lasciando comunque ampio spazio a soluzioni tecniche strategiche. I vincoli più significativi sulle prestazioni del motore riguardano la cilindrata (che non deve eccedere i 610 cc) e l’obbligo di inserire un restringimento di 20 mm di diametro nel circuito di aspirazione. La sicurezza sulla vettura è un argomento molto stressato dal regolamento che
1.1. LA FORMULA SAE CAPITOLO 1. INTRODUZIONE
Figura 1.1: Panoramica dei partecipanti alla FSG 2010.
in tal senso prevede adeguate protezioni per il pilota in caso di urto laterale, frontale, e di ribaltamento. Lo spirito della manifestazione è quello di premia-re non tanto la squadra con l’auto più veloce, quanto il team con il miglior connubio fra prestazioni, costo, e design.
Ad oggi la competizione si è diffusa in tutto il mondo, con nove eventi annuali ufficiali, tre dei quali negli Stati Uniti, e quattro in Europa (Inghilterra, Germania, Austria e Italia). Gli eventi sono tutti accomunati dallo stesso regolamento, e costituiscono ognuno una competizione indipendente, senza cioè contribuire ad assegnare punti per un campionato. Ad ogni gara è possibile totalizzare un massimo di 1000 punti, assegnati in base all’esito delle prove statiche e dinamiche.
L’E-Team Squadra Corse dell’Università di Pisa, da tre anni ormai, prende parte alla competizione, e quest’anno ha gareggiato con la monoposto ET3. La vettura, oggi alla sua terza evoluzione, ha ottenuto buoni risultati alle manifestazioni Europee, attestandosi al 55° posto ad Hockenheim, e al 9° posto a Varano de’ Melegari (prima fra le italiane). In Figura 1.2 è mostrata una foto della vettura in gara ad Hockenheim.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
Figura 1.2: Il pilota Tommaso Castellani a bordo della ET3.
1.2
ET3: Elettronica
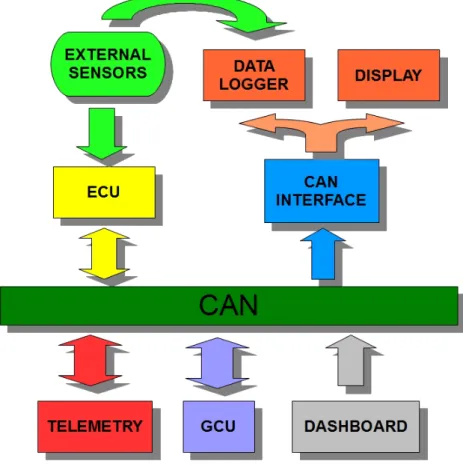
L’ET3 è dotata di molteplici dispositivi elettronici, alcuni acquistati da terze parti, e altri realizzati dal team all’interno della divisione di elettronica. A bordo del veicolo troviamo una centralina motore, una centralina del cam-bio, un dispositivo per la gestione del selettore e dei pulsanti sul cruscotto, un acquisitore dati, un display, ed una radio del sistema di telemetria (l’altro modulo è connesso al PC). L’auto è equipaggiata, inoltre, con molteplici sen-sori (sensen-sori di pressione, temperatura, posizione, velocità, accelerazione. . . ), parte dei quali integrati nel sistema di acquisizione dati (accelerometro, GPS, giroscopio. . . ). I diversi dispositivi si interfacciano sulla rete CAN secondo lo schema riportato nel diagramma a blocchi in Figura 1.3. Il display, il data-logger, e il CAN IF costituiscono un unico pacchetto commerciale, in cui la comunicazione interna avviene tramite collegamento seriale RS232.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
1.2.1
La centralina del motore
La centralina motore, in breve ECU (Engine Control Unit), anche nota con l’acronimo ECM (Engine Control Module) o PCU/PCM (Powertrain Control Unit/Module), è un’unità di controllo del motore. La sua principale funzione è quella di supervisionare attivamente le condizioni di esercizio del motore, e di modificare alcuni meccanismi di funzionamento, con lo scopo di raggiungere la regolazione ottimale al cambiare delle condizioni esterne, sia atmosferiche che di carico sulla vettura. Le ECU attualmente in commercio sono in grado di regolare la quantita di carburante per ogni cilindro, la quantità d’aria nel con-dotto di aspirazione, il tempo di iniezione, la fasatura d’accensione, e agiscono, inoltre, attivamente sul controllo della trazione, sulla velocità e sul numero dei giri motore. Queste rappresentano, tuttavia, solo alcune delle funzioni comu-nemente implementate da una centralina motore; altre funzioni riguardano il controllo del consumo carburante, l’inquinamento, e il regime di minimo.
Una ECU per funzionare correttamente necessita di precisi segnali. Questi le vengono inviati dai sensori dislocati in punti ben precisi del motore (sensore di temperatura del motore, sensore di temperatura dell’aria, sensore di battito in testa, sensore di posizione della valvola a farfalla, sensore lambda, sensore di pressione nei condotti di aspirazione. . . )
La centralina motore montata sulla ET3 è la Athena HPUH4, e sostituisce la precedente Walbro TDD HPUH-1. Questa nuova ECU, mostrata in Figura
1.4, è in grado di gestire motori a 2 e 4 tempi, e può controllare motori fino a 6 cilindri eventualmente equipaggiati con un corpo farfallato motorizzato. A cor-redo della centralina è fornito anche un software di programmazione firmware per la creazione delle mappe motore, e per la calibrazione degli ingressi analo-gici e digitali. In breve le principali caratteristiche hardware della centralina sono:
• 1 microcontrollore a 32 bit con clock a 80 MHz.
• 1 memoria Flash da 256 Kb.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
• 1 driver per lo stepper di aspirazione.
• 1 driver per il controllo diretto delle ventole di raffreddamento.
• 1 driver per il controllo della pompa carburante.
• 6 driver per gli iniettori.
• 11 ingressi analogici (tps, map, lambda...).
• 6 ingressi digitali (speed, change-map, camshaft...).
• 1 sensore di pressione.
• 1 porta seriale RS232.
• 1 interfaccia CAN a 1 Mbps per collegamento su bus CAN.
Figura 1.4: Immagine della centralina Athena HPUH4.
Le funzioni implementate da questa centralina sono numerose. Esse spaziano dalla gestione del tempo di iniezione, alla limitazione sul numero dei giri mo-tore. Inoltre, sono implementate funzioni speciali che permettono, ad esem-pio, di cambiare marcia in salita senza l’ausilio della frizione, ma tagliando semplicemente l’alimentazione del motore (cut-off).
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
In aggiunta a tutto questo, la centralina è in grado di trasmettere al siste-ma di telemetria i parametri più significativi del motore (tempo di iniezione, percentuale di apertura della valvola a farfalla, pressione dell’aria nel condotto di aspirazione etc...), sfruttando il collegamento sul bus CAN. Insieme a questi dati, la centralina invia anche i valori istantanei acquisiti dai sensori ad essa collegati (velocità, temperatura del motore, rapporto aria-combustibile etc...).
1.2.2
La centralina del cambio
Questo dispositivo, noto anche con l’acronimo GCU (Gear Control Unit), si occupa principalmente di gestire l’inserimento delle marce sulla vettura. La GCU attualmente in uso sulla ET3 è stata realizzata internamente al team, come tesi di laurea specialistica [1]. L’architettura della centralina si basa su un microcontrollore Atmel a 8 bit con interfaccia CAN, ed è caratterizzata da un driver a transistori MOS per il pilotaggio delle elettrovalvole. Queste a loro volta comandano due attuatori pneumatici, uno applicato alla leva del cambio, e l’altro applicato alla leva della frizione; la GCU controlla, quindi, anche l’inserimento o meno della frizione. Il cambio montato a bordo della vettura, è di derivazione motociclistica, ed è pertanto di tipo sequenziale robotizzato.
La centralina è in grado di gestire, dunque, la salita di marcia, la scalata di marcia, l’inserimento della folle e, come poc’anzi detto, l’innesto o meno della frizione. La salita di marcia viene effettuata inviando un segnale di
cut-off all’alimentazione del motore e azionando contemporaneamente l’attuatore
del cambio. La scalata di marcia utilizza solo la frizione. Quest’ultima viene innestata dal motore poco prima di comandare l’attuatore del cambio. L’in-serimento della folle si comporta come la salita di marcia, ed è inseribile solo a partire dalla prima marcia. Infine, il disinserimento della frizione è ottenuto semplicemente comandando la specifica elettrovalvola ed il corrispettivo attua-tore. In Figura 1.5 viene mostrata una foto della GCU.
Ogni funzione eseguita dalla centralina del cambio è conseguenza di un oppor-tuno comando. Nell’attuale versione del firmware, i comandi sono messaggi CAN inviati dal sistema di telemetria o dall’unita di controllo sul cruscotto.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
Figura 1.5: Immagine della centralina del cambio.
Quest’ultima interpreta le volontà del pilota (es. il pilota decide di cambiare la marcia premendo il paddle destro sul volante), e le inoltra alla GCU sottoforma si messaggi CAN codificati.
Oltre alla gestione manuale del cambio (es. il pilota preme il paddle sul volante per comandare una cambiata di marcia), la centralina mette a dispo-sizione del pilota altre due modalità, di più alto livello, per la gestione delle marce. La prima è una modalità automatica in cui la cambiata in salita è gesti-ta dalla centralina secondo un algoritmo basato sulla velocità di rogesti-tazione del motore. Tuttavia il pilota, se lo desidera, può intervenire manualmente e cam-biare la marcia. Attualmente non è prevista una modalità automatica per la scalata. La seconda modalità di gestione del cambio è quella semi-automatica. In questo caso il controllo delle marce è automatico fin tanto che il paddle destro del volante è premuto. Non appena il paddle viene rilasciato, si torna alla gestione manuale.
La GCU non solo riceve messaggi su bus CAN, ma è anche in grado di inviare informazioni su di esso. Queste sono per lo più informazioni di stato che consistono nel numero di marcia inserita, nella modalita di gestione del
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
cambio, nella pressione dell’aria nel circuito pneumatico, ed altro ancora. Tut-ti quesTut-ti parametri vengono sostanzialmente acquisiTut-ti dal sistema di telemetria che le visualizza sullo schermo del PC. La centralina, su richiesta, trasmet-te anche partrasmet-te dei dati memorizzati su EEPROM; questi intrasmet-teressano alcuni aspetti della cambiata, ma non solo. Un aspetto interessante riguarda pro-prio l’aggiornamento di questi dati. Grazie al sistema di telemetria, e ad una interfaccia personalizzata di LabVIEWr, attualmente è possibile modificare da remoto la memoria della centralina, sopperendo, quindi, alla necessità di collegarsi fisicamente alla rete CAN tramite l’opportuno connettore a bordo della vettura.
1.2.3
L’unità di controllo del cruscotto
Questo dispositivo, in inglese dashboard unit, è l’unità di controllo che ge-stisce i pulsanti presenti sul volante e il selettore sul cruscotto della macchina. Come preannunciato nel paragrafo precedente, il compito dell’unità è quello di interpretare le azioni compiute dal pilota, e di tradurle in opportuni mes-saggi per la rete CAN. L’unità di controllo del cruscotto è una creazione della divisione di elettronica, e al suo progetto hanno contribuito attivamente tutti i suoi membri. In Figura 1.6 e in Figura1.7 sono rispettivamente mostrate la dashboard unit (DBU) e il cruscotto della vettura, dietro il quale trova allog-giamento la dashboard unit stessa. Questa non era presente nelle precedenti versioni della macchina, e le sue funzioni venivano svolte direttamente dalla centralina del cambio. A differenza degli anni passati, adesso la vettura è do-tata di una vera e propria rete CAN, e questo ha permesso di demandare le funzioni di gestione del cruscotto direttamente alla dashboard unit, riducendo in modo significativo le operazioni della GCU; quest’ultima si occupa ora di gestire solo l’innesto delle marce e l’apertura della frizione.
Nella Figura1.7, in alto a sinistra, si può vedere il selettore a 4 posizioni di cui si è brevemente accennato in precedenza. Agendo su quest’ultimo, il pilota può modificare la modalità di gestione del cambio. Si passa dalla modalità ma-nuale quando la manopola è in posizione 1 e 4, alla modalità semi-automanica
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
Figura 1.6: Immagine della dashboard unit.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
e automatica quando la manopola si trova nelle posizioni 2 e 3 rispettivamen-te. In Figura 1.8 sono mostrati, invece, i pulsanti del volante: il pulsante blu (clutch) serve ad innestare o a rilasciare la frizione in ‘over-ride’, il pulsante verde (neutral) permette l’inserimento della folle dalla prima marcia, mentre il pulsante giallo (launch) aziona il controllo di trazione per agevolare il pilota nelle partenze da fermo. Sempre in Figura1.8si nota la presenza di un pulsan-te rosso, a cui attualmenpulsan-te non è associata alcuna funzione. Sempre in Figura
Figura 1.8: Immagine posteriore e anteriore del volante della ET3.
1.8, viene mostrata la parte posteriore dello sterzo. Sotto i paddle del volan-te sono presenti due involan-terrutori di limivolan-te SPDT utilizzati come involan-terruttori a bilancere per comandare la cambiata in salita/discesa delle marce. Sebbene sul cruscotto siano presenti altri pulsanti (accensione motore, accensione ECU, cambio mappa motore), la dashboard unit di fatto si trova a gestire solamente gli elementi che sono stati descritti. Essa, periodicamente, e in modo ciclico, interroga lo stato dei pulsanti e del selettore, crea un messaggio in codice, e trasmette quest’ultimo sul bus CAN. Il destinatario principale di questo mes-saggio è la centralina del cambio. Questa decodifica le informazioni contenute nel messaggio ed esegue le opportune operazioni. Il messaggio di stato della
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
dashboard viene trattato anche dal sistema di telemetria. Questo si limita tuttavia a visualizzarne il suo contenuto su PC.
1.2.4
Il sistema di acquisizione dati
La funzione principale di un sistema di acquisizione dati, in inglese
data-logger, è quella acquisire e memorizzare su un supporto non volatile i segnali
in arrivo dalle sorgenti in ingresso. Si parla più propriamente di acquisitore dati, in quanto le grandezze in ingresso vengono campionate ad un rate fisso, in alcuni casi selezionabile dall’utente finale. Il sistema di acquisizione dati mon-tato sulla ET3 si chiama DL1, ed è commercializzato dalla Race-Technology (http://www.race-technology.com). In Figura 1.9 è mostrata un’immagine dell’oggetto in questione. Internamente al dispositivo (come dotazione di base)
Figura 1.9: Immagine del sistema di acquisizione dati DL1.
è presente un sistema GPS e un accelerometro triassiale. Tuttavia, il modello montato sulla ET3 è dotato anche di un giroscopio (optional). Il data-logger è venduto insieme ad un software per l’elaborazione dei dati. Questo software, tra le altre cose, permette di personalizzare le grandezze da acquisire, e di confrontare contemporaneamente fino a 10 set di acquisizioni dati. Grazie al sistema GPS e al software in dotazione, è possibile ricostruire il tracciato del veicolo, ed avere rilevazioni sufficientemente accurate sulla velocità del mez-zo(1% di errore sul valore acquisito in condizioni operative normali, 20% di errore in caso di decelerazioni o accelerazioni > 1g). La frequenza con la qua-le il GPS determina la velocità del veicolo è di 5 Hz (opzionalmente 20 Hz).
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
Tuttavia, il valore acquisito è combinato con le rilevazioni provenienti dall’ac-celerometro, e ciò permette di avere un rate effettivo di 100 Hz. Il supporto di memorizzazione è una scheda Compact Flash. Il DL1 può acquisire fino a 8 ingressi analogici con una risoluzione di 12 bit e una dinamica d’ingresso da 0-12 V. Sono presenti, inoltre, 4 ingressi denominati «frequency inputs» speci-fici per segnali il cui contenuto informativo è in frequenza (es. ruote foniche); essi sono attualmente collegati alle ruote foniche della macchina. Il data-logger dedica poi due ingressi agli RPM del motore, uno per le sorgenti con dinamica d’uscita 0-12 V, e l’altro per le sorgenti con dinamica d’uscita 0-5 V (ECU). Il sistema della Race-Technology è dotato, infine, di una porta seriale RS232. Questa può essere configurata per ricevere dati da sorgenti esterne, ad esempio i dati proveniente da una interfaccia CAN-RS232. A tal proposito l’azienda vende separatamente un modulo per interfacciare il data-logger con un dispo-sitivo o un bus CAN (nel diagramma a blocchi in Figura 1.3 è stato indicato come can interface).
1.2.5
Il display
La funzione del display è banalmente quella di visualizzare le informazioni che giungono in ingresso. Lo schermo generalamente è di tipo LCD, anche se cominciano a diffondersi i primi modelli a LED. Il dispositivo utilizzato a bordo della ET3 si chiama DASH3 ed è prodotto anch’esso dalla Race-Technology. La scelta è ricaduta su questo componente per il semplice fatto che esso si integra bene con il sistema di acquisizione dati DL1. Di fatto, parte delle funzionalità del display sono condizionate da come è stato configurato il data-logger. In Figura 1.10 è mostrata una foto del display. Nella parte superiore del display è presente una barra led a 6 elementi, che può essere associata ad una generica variabile del data-logger. Attualmente i led sono associati agli RPM della macchina. L’accensione dei led avviene in modo progressivo sulla base delle soglie che sono state impostate via software. Sulla parte destra sono presenti 4 tasti direzionali per la navigazione del menù e delle schermate utente. Queste sono quattro, e tutte pienamente configurabili dall’utilizzatore. All’interno di
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
Figura 1.10: Immagine del display DASH3 a bordo della ET3.
ogni schermata, l’utente può inserire fino a dieci indicatori di varia natura. Si può decidere di usare un display numerico, una barra a riempimento, un grafico, e ancora una casella di testo. Ogni indicatore è associabile ad una particolare variabile del data-logger, e di ciascuno (ad esclusione delle caselle di testo) si può definire il range di variazione, il fattore di scala, e l’unità di misura. Esistono, tuttavia, opzioni specifiche per il particolare indicatore utilizzato. Sul display della ET3, nella schermata principale, si è scelto di visualizzare il numero dei giri motore, la marcia attuale, la modalita di cambio, e lo stato della frizione. Le altre schermate utente sono, invece, riservate alla visualizzazione di parametri secondari (temperatura motore, velocità, etc...).
1.2.6
La sensoristica
La sensoristica presente a bordo della ET3 è molto varia, e per alcuni aspet-ti eccede anche quelle che sono le reali esigenze di una vettura di questo aspet-tipo. Tuttavia, i sensori e i relativi sistemi di acquisizione rivestono un ruolo fonda-mentale per gli ingegneri che si occupano della messa a punto della monoposto. In questa ottica è opportuno suddividere i dati forniti dai sensori in due grandi categorie, quelli affini al motore e quelli relativi alla dinamica del veicolo [2]. I dati che interessano il propulsore sono:
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
• Posizione della valvola a farfalla (Throttle-Position-Sensor ).
• Giri motore per minuto (RPM ).
• Temperatura dell’aria nel condotto di aspirazione.
• Temperatura dell’acqua nel circuito di raffreddamento.
• Pressione atmosferica.
• Depressione nel condotto di aspirazione.
• Tensione di batteria.
• Sonda Lambda.
• Sensore resistivo del numero di marcia.
Questi dati sono acquisiti (ad eccezione del numero di marcia) dalla centralina motore, e vengono utilizzati per regolare sostanzialmente i tempi di iniezione e l’anticipo sull’accensione. Fondamentali in tal senso sono le informazioni sulla parzializzazione della valvola a farfalla, sulla depressione nel collettore di aspirazione, e sul rapporto aria-combustibile, nonché sul numero dei giri motore per la definizione della mappa. I dati affini alla dinamica del veicolo sono:
• Escursione delle sospensioni.
• Angolo di sterzo.
• Velocità delle singole ruote.
• Accelerazione nelle tre dimensioni.
• Velocità di rotazione.
1.2. ET3: ELETTRONICA CAPITOLO 1. INTRODUZIONE
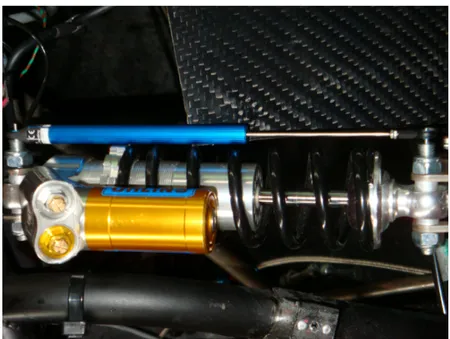
Figura 1.11: Immagine dei sensori resistivi per la misura delle escursioni
delle sospensioni.
L’escursione delle sospensioni è misurata tramite dei potenziometri lineari. Come mostrato in Figura 1.11, i potenziometri sono montati parallelamente agli ammortizzatori e sono solidali ai supporti delle sospensioni stesse. I sensori utilizzati sono prodotti dalla Penny+Giles, e hanno una lunghezza massima di 75 mm, per una resistenza complessiva di 3 kΩ. Lo stesso modello di potenzio-metro è utilizzato anche per la misura dell’angolo di sterzo. Poiché il sensore è solidale al tirante di sterzo del veicolo, la misura dell’angolo viene derivata in funzione del suo discostamento dal punto di riposo, che corrisponde a metà corsa del potenziometro.
La velocità di ciascuna ruota è misurata, invece, con dei sensori ad effet-to Hall. Al loro interno è presente un sensore di campo magnetico in grado di rilevare le variazioni di induzione magnetica, prodotte dall’avvicinarsi di un target ferromagnetico, a cui segue una corrente indotta alternata. Nello specifico il target è costituito dalle prominenze di una speciale ruota dentata (ruota fonica) collegata assialmente a ciascuna ruota della macchina. L’elet-tronica integrata nel sensore produce in uscita un segnale digitale i cui fronti
1.3. ORGANIZZAZIONE DEL TESTO CAPITOLO 1. INTRODUZIONE
rappresentano esattamente il passaggio dei denti. Le ruote foniche montate sulla ET3 sono caratterizzate da 12 denti, e i relativi sensori sono incollati sui mozzi delle ruote, ad una distanza inferiore ai 5 mm per garantirne il corretto funzionamento.
Le accelerazioni del veicolo vengono misurate con un accelerometro trias-siale con fondo scala di 2g, mentre l’imbardata è misurata da un giroscopio con fondo scala ±300 deg/s. Le misure di posizione e velocità del veicolo sono effettuate, invece, con un modulo GPS. Tutti e tre i sensori, come descritto in precedenza, sono integrati all’interno del data-logger.
La velocità di imbardata, insieme all’angolo di sterzo e alla velocità di percorrenza, è utile per determinare il comportamento in curva del veicolo. Infatti, è possibile capire se la vettura sta seguendo la traiettoria imposta oppure se sta sovrasterzando, o sottosterzando.
1.3
Organizzazione del Testo
In questo capitolo introduttivo sono stati presentati, seppur in modo del tutto generale, i dispositivi che compongono l’elettronica dell’ET3, ad ecce-zione del sistema di telemetria, oggetto di questa tesi di laurea. I capitoli successivi sono incentrati, invece, sul progetto della telemetria.
Nel secondo capitolo, dopo una breve digressione storica sulle origini e sull’evoluzione dei sistemi di telemetria, si presenta quello che ad oggi è lo stato dell’arte in questo settore. Infine, nella parte conclusiva del capitolo si analizzano le specifiche e le soluzioni progettuali adottate, e si descrive i sistema di telemetria realizzato.
Il terzo capitolo è dedicato al progetto hardware in tutte le sue componenti. Si parte con la descrizione dei componenti utilizzati, e si prosegue analizzando il disegno delle PCB e il software utilizzato per la loro definizione. Il capitolo si conclude con un brevissimo cenno al software utilizzato per il disegno 3D delle schede elettroniche.
1.3. ORGANIZZAZIONE DEL TESTO CAPITOLO 1. INTRODUZIONE
Il quarto capitolo è riservato, invece, alla descrizione dei firmware sulle due schede. Inizialmente si presenta il firmware dell’unità PC, per poi analizzare il firmware dell’unità di bordo, molto più complesso. In tal senso una sezione a parte è dedicata alla periferica CAN e alle librerie di progetto.
Nel quinto capitolo viene illustrata l’interfaccia LabVIEWr realizzata a corredo del sistema di telemetria. Il capitolo si pone come una breve guida per l’utente che intende utilizzare il programma, e in quest’ottica descrive le schermate che caratterizzano il software. Infine, si analizza la struttura del programma e le soluzioni adottate.
L’ultimo capitolo è dedicato alla lunga fase di test, l’iter seguito, le proble-matiche affrontate e poi risolte. La tesi si conclude con la descrizione dei risul-tati ottenuti durante il collaudo in aeroporto, presso il circuito internazionale di Hockenheim, e quello di Varano de’ Melegari.
Capitolo 2
La Telemetria
Questo capitolo vuole essere una breve introduzione al mondo della tele-metria, le sue origini, le sue applicazioni. La prima sezione, infatti, parte dall’etimologia della parola, e prosegue con la trattazione dell’evoluzione sto-rica dei sistemi di telemetria, dalle origini sino ad arrivare ai giorni nostri. La seconda sezione prende in esame gli attuali campi di applicazione della teleme-tria, dalla medicina alla gestione ottimale delle risorse di energia; un argomento molto sentito oggigiorno. La terza sezione rappresenta lo stato dell’arte, limi-tamente all’ambiente del motorsport. Infine, l’ultima sezione è dedicata alla presentazione del sistema di telemetria, argomento della tesi. Si analizzano le specifiche di progetto, e con esse le soluzioni tecniche adottate.
2.1
Origini e storia
La parola telemetria deriva dalle radici greche tele = lontano, e metron = misura, quindi significa rilevare dati da lontano. Questa definizione è, tuttavia, deficitaria e insufficiente, in quanto omette una caratteristica peculiare della telemetria, cioè il real-time. In tal senso è bene far chiarezza, si da subito, su ciò che si intende oggi con il termine di telemetria, per evitare di incorrere in un errore molto diffuso. La telemetria non è la semplice rilevazione di dati da lontano, ma è una una rilevazione in tempo reale. Questo è ciò che avviene, ad
2.1. ORIGINI E STORIA CAPITOLO 2. LA TELEMETRIA
esempio, all’interno di una moderna scuderia di Formula 1. In quest’ambito, i dati provenienti dai molteplici sensori della monoposto, vengono trasferiti via radio ai computer presenti ai box, mentre la vettura sta correndo lungo la pista. Ben diverso è ciò che avviene, invece, nel mondo delle superbike o della motoGP, dove i dati vengono analizzati solo quando la moto è rientrata ai box. Tale differenza spiega l’esistenza in commercio di apparati elettro-nici come i data-logger e i sistemi di telemetria: apparentemente simili, ma sostanzialmente diversi.
Oggi, sempre più del passato, si tende ad associare la telemetria ad un tipo di comunicazione senza filo, grazie anche all’intenso sviluppo e alla mas-siccia diffusione dei sistemi wireless. Naturalmente esistono sistemi in cui il trasferimento dei dati avviene ancora via cavo, come la rete telefonica o la rete internet cablata. Di certo la comunicazione radio è quasi d’obbligo laddove il target di misura è in movimento.
Storicamente i primi dispositivi telemetrici fecero la loro comparsa nel dia-ciannovesimo secolo [3]. Naturalmente si trattava di rudimentali sistemi via cavo, dato che il wireless venne scoperto soltanto nel 1893 ad opera dello scien-ziato serbo Nikola Tesla. Uno dei primi sistemi di telemetria venne realizzato nel 1845 tra il palazzo d’inverno dello zar Nicola I ed il quartier generale dell’esercito russo con scopi di carattere militare. Nel 1874 alcuni ingegneri francesi costruirono un elementare sistema per rilevare le condizioni meteo e la profondità della neve sul Monte Bianco. Tale sistema era poi in grado di trasmettere in tempo reale le informazioni acquisite direttamente ad una se-de distaccata di Parigi. Nel 1906, invece, venne realizzata la prima stazione sismica collegata via telemetria all’osservatorio Pulkovo in Russia. Nel 1912 la Commonwealth Edison sviluppò un sistema in grado di monitorare in tem-po reale l’assorbimento sulla rete elettrica cittadina. La telemetria wireless, invece, fece la sua prima apparizione solo nel 1930 quando, in concomitanza con il francese Robert Bureau, il russo Pavel Molchanov realizzò la radiosonda. Questo è un apparecchio ancorato ad un pallone gonfiato con idrogeno/elio, ed equipaggiato con strumenti in grado di misurare la temperatura dell’aria,
2.2. SETTORI DI APPLICAZIONE CAPITOLO 2. LA TELEMETRIA
l’umidità e la pressione atmosferica. Nel 1957 Makay e Jacobson realizzaro-no la prima endo-radiosonda (radio-pills) [4], un dispositivo che in soli 2 cm3
di volume era in grado di registrare e trasmettere via radio informazioni sul tratto gastrointestinale del paziente (temperatura, pH, pressione etc...). Il pri-mo esempio di radio telemetria in ambito pri-motoristico risale soltanto al 1987, ad opera dell’ingegnere, e pilota d’auto sportive, James Denis Horley. L’ap-parecchio, chiamato racing modem, era in grado di monitorare la ECU e la temperatura delle gomme. I dati raccolti venivano inviati in tempo reale ai box tramite un ponte radio.
La telemetria oggi ha assunto un ruolo fondamentale in molti settori della produzione industriale, e in molti aspetti della vita quotidiana. L’esigenza di dover controllare in tempo reale un processo produttivo, o quello di monitorare le funzioni vitali di una persona, ha contribuito in modo decisivo allo sviluppo della telemetria. Tutto è stato reso possibile dal continuo sviluppo nel settore delle telecomunicazioni, ma anche dal potenziamento delle unità di calcolo, grazie alle quali oggi è possibile trattare grandi moli di dati.
2.2
Settori di applicazione
Oggi, nell’immaginario collettivo, il termine telemetria è spesso associato al mondo delle corse motoristiche e in particolar modo al mondo della Formula 1. Quando si parla di telemetria, infatti, si è spesso portati a pensare al sistema di monitoraggio dei paramentri di una vettura di Formula 1. La causa di tutto ciò, probabilmente, è da ricercare nei mass media e nella popolarità di questo sport. Tuttavia, i settori di applicazione spaziano dal campo medico a quello militare, da quello agricolo a quello della gestione delle fonti di energia.
La telemetria è attualmente impiegata nei sistemi di difesa e nelle esplora-zioni spaziali, poiché permette il monitoraggio automatico, e la registrazione dati necessaria ad operazioni sicure ed efficienti. Gli enti spaziali, come la NASA e l’ESA, utilizzano la telemetria per sistemi complessi come razzi, RPV (Remotely Piloted Vehicles), veicoli spaziali, satelliti. Essa è impiegata sia
2.2. SETTORI DI APPLICAZIONE CAPITOLO 2. LA TELEMETRIA
nella fase di sviluppo che in quella di test, con lo scopo di migliorarne le prestazioni, e aumentarne la sicurezza.
In campo medico la telemetria wireless è usata per monitorare da remo-to i parametri fisiologici del paziente, ad esempio i battiti cardiaci, a mez-zo di segnali RF emessi da un trasmettitore indossato dal paziente stesso. La biotelemetria permette di ridurre i disagi del paziente e ne assicurara la libertà dei movimenti, garantendone l’assistenza anche quando questi non è ricoverato in una struttura medica. L’invecchiamento della popolazione sta spingendo oggi l’Europa ad introdurre la telemedicina anche all’interno delle case, seguendo quelle che sono le direttive del progetto eHealth 2004 (http://www.ehealth-era.org).
La telemetria è impiegata, oggi, anche nel settore della gestione e del ri-sparmio energetico. Un esempio su tutti è quello fornito dal Giappone, do-ve il monitoraggio del consumo energetico permette di migliorare l’efficienza energetica nelle fabbriche, uffici, e nelle abitazioni.
Il rilevamento telemetrico è usato ancora per controllare gli esemplari delle specie animali a rischio di estinzione. Questi sono comunemente attrezzati con strumentazioni che variano dalle semplici targhette di riconoscimento, alle telecamere, al GPS, fornendo tutte le informazioni del caso agli scienziati, agli attivisti, e alle autorità competenti.
Un altro settore molto importante è quello del controllo dei processi indu-striali. In quest’ambito, spesso, si sente parlare di sistemi SCADA (Supervi-sory Control And Data Acquisition), cioè sistemi in grado di acquisire dati, supervisionare e controllare i vari aspetti di un processo industriale. Esempi di applicazione industriale sono l’edilizia, la raffinazione del petrolio, la pro-duzione di gas, la propro-duzione di energia elettrica, il trattamento delle acque, e lo smaltimento dei rifiuti.
Il principale settore di sviluppo per i sistemi di telemetria resta, comunque, quello delle competizioni sportive. Un esempio è quello fornito dalle competi-zioni ciclistiche. Nell’ultima edizione del Tour De France, un moderno sistema di telemetria denominato SRM, ha permesso di visualizzare in tempo reale
al-2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
cune informazioni sugli atleti durante le tappe. In salita, oppure in occasione degli sprint, veniva mostrata la frequenza cardiaca, la cadenza e la potenza espressa, oltre all’età, la squadra di appartenenza e la specialità. Altri esempi si trovano oggi nel nuoto e nella maratona, con lo scopo di finalizzare l’alle-namento degli atleti. Nel calcio la telemetria viene usata per ottimizzare le terapie, e ridurre così i tempi di recupero dagli infortuni. Un altro esempio di applicazione è quello fornito dal team Alinghi nelle gare di vela. Esso, infatti, utilizza una fitta rete di fibre ottiche con lo scopo di monitorare istante per istante il carico di lavoro dello scafo.
La massima espressione della telemetria moderna rimane indiscutibilmente quella della Formula 1. La telemetria è il cuore tecnologico di questo sport, aiutando piloti ed ingegneri a comprendere al meglio le dinamiche che agiscono in una monoposto, così da ottimizzare il set-up della vettura, e prevenirne un guasto. Esempi di rilevazioni utili su una macchina da corsa sono l’accelerazio-ne l’accelerazio-nei 3 assi, le letture della temperatura, la velocità delle ruote e l’escursiol’accelerazio-ne delle sospensioni. Tuttavia, queste sono solo alcune delle rilevazioni che si ef-fettuano. Basti pensare che a bordo di una vettura attualmente sono presenti circa 120 sensori, e che ad ogni giro di pista mediamente si acquisiscono 50 Megabyte, con un totale di circa 3,5 Gigabyte per ogni gara. La telemetria in questo settore non è solo hardware, ma è soprattutto software. In questo senso grande importanza viene data alla protezione dei dati; motivo per il qua-le alcuni team, come la McLaren, tendono a sviluppare i software di analisi internamente all’azienda.
2.3
Stato dell’arte
Questo paragrafo vuole essere una panoramica sui sistemi di telemetria wi-reless, e sui i sistemi radio attualmente presenti nell’ambiente del motorsport. La ricerca è stata circoscritta a tale settore, vista la stretta attinenza con l’ar-gomento della tesi. Sebbene in letteratura siano diversi i lavori dedicati ai sistemi di telemetria [5][6], non è stato trovato alcun lavoro che fosse
stretta-2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
mente legato all’ambiente delle corse automobilistiche. Nel seguito, pertanto, verranno presi in considerazione esclusivamente sistemi commercializzati dalle aziende operanti nel settore del motorsport.
Il primo sistema di telemetria che si analizza è venduto dalla Stackltd (http://www.stackltd.com). Il modello del dispositivo è il ST8956W, ed è in realtà un datalogger con funzioni di telemetria (Figura 2.1).
Figura 2.1: Immagine del dispositivo Stackltd ST8956.
Di seguito, invece, sono riportate le principali caratteristiche dell’oggetto, con particolare attenzione a quelle che sono le specifiche wireless del dispositivo:
• Data recorder - up to 200 Hz per channel.
• Resolution - 10 bit analogue/16 bit digital inputs.
• Sensor inputs - Up to 45, 24 built-in.
• Built-in 3-axis +/-6g.
• Built-in CAN ECU links and GPS interface options.
• Wireless download over Wi-Fi.
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
• Synchronized video-logging and video data overlay option.
• Maximum Wireless Download Range (subject to antennae) 100 m (300 feet).
• Transmitted power 14 +/- 1 dBm.
• Receiver sensitivity -82 to -93 dBm 11 Mbps to 1 Mbps respectively.
• Wi-Fi (W-LAN) Compatibility 802.11b/g.
• Frequency range 2.412 - 2.484 GHz.
Poichè il dispositivo è compatibile con gli standard 802.11b/g, la comunica-zione radio può essere stabilita con un qualunque PC dotato di scheda WI-FI. Questo se da un lato permette di abbattere notevolmente i costi del sistema complessivo, dall’altro lato penalizza il range di copertura radio (solo 100m di copertura radio). Il sistema è fornito insieme al software Data Pro 5, ed venduto al pubblico al prezzo di 2100 d.
Di altra fattura è, invece, il sistema telemetrico sviluppato e venduto dal-l’azienda Autotel Race Radio (http://www.autotel.co.uk). Questo prodotto si colloca nella gamma di prodotti medio-alta, e a differenza del precedente è esclusivamente un sistema di telemetria. Esso è ampiamente utilizzato nella 24hr di Le Mans, e si adatta bene ad ogni tipo di gara automobilistica. Il prez-zo di vendita è di 4100d (iva inclusa), ben più alto del precedente. Il maggior prezzo può essere attribuito alle diverse prestazioni del sistema, alla dotazio-ne hardware, e al comparto software. Di seguito si riportano le principali caratteristiche del sistema:
• Interfaccia: RS-232 / RS-422 / RS-485.
• Velocita dati dell’interfaccia RS: 300 - 38400 bps.
• Velocità dati Interfaccia radio: 19200 bps (canali 25 kHz) 9600 bps (canali 12.5 kHz).
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
• Bande di frequenza: 400 - 470 MHz.
• Potenza Trasmessa: 1 - 10 W.
• Tensione operativa: +11.8 ÷ +30 Vdc.
• Consumo: 3 VA tipico (ricezione), 25 VA tipico (trasmissione), 0.05 VA tipico (standby).
• Intervallo temperature: -25 °C ÷ +55 °C.
In Figura2.2 è mostrata l’immagine di una delle due unità radio in dotazione.
Figura 2.2: Immagine del sistema di telemetria Autotel Race Radio.
Esistono poi prodotti professionali il cui prezzo si aggira attorno ad alcune decine di migliaia di euro, e che vengono utilizzati nel mondo della Formula 1. Esempi sono il CBX-450 prodotto dalla McLaren Electronic Systems e il p192s della Cosworth.
I sistemi sin qui analizzati non rappresentano la totalità dei sistemi e delle opportunità possibili, ma costituiscono solo un esempio delle soluzioni all-inclusive presenti sul mercato; cioè soluzioni che affiancano un comparto soft-ware ad una piattaforma hardsoft-ware. L’orizzonte delle offerte commerciali si
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
amplia notevolemente se si guarda semplicemente alle soluzioni che il mer-cato propone per realizzare una connessione radio tra due unità a grande distanza; la comunicazione radio, infatti, rappresenta un aspetto fondamen-tale della telemetria wireless, sebbene non esaurisca l’argomento. In que-sta direzione, un prodotto pensato per la realizzazione di un ponte radio a lunga distanza è il XTend-PKG, commercializzato dalla Digi International (http://www.digi.com). Il dispositivo in questione è un modem radio con portante attorno ai 900 MHz, e porta seriale con supporto ai comandi AT. In Figura 2.3 viene mostrata l’immagine del singolo modulo radio, mentre di seguito vengono riportate le principali caratteristiche:
• Outdoor RF line of sight range: up to 14 miles (22 km).
• Indoor/Urban range: up to 3000 feet (900 m).
• Transmit power output (software selectable): 1 mW - 1W.
• Interface data rate: 10 - 230400 bps.
• Receiver sensitivity: -110 dBm (@ 9600 bps throughput data rate), -100 dBm (@ 115200 bps).
• Power supply voltage: 7 - 28 V.
• Receive current: 100 mA (17 mA in standby).
• Transmit current (1 mW - 1 W TX power output): 110 - 900 mA.
Il prezzo di vendita per una coppia di radio è di circa 400 d.
Un prodotto simile per prestazioni e funzionalità è il ConnexLink 4424 (Figura 2.4) della Laird Technologies (http://www.lairdtech.com/). Le dif-ferenze principali riguardano la potenza massima in trasmissione (100 mW), il range di frequenze (2.402 - 2.478 GHz), e il data rate della porta seriale (288 kbps). Anche in questo caso, il prezzo di mercato per una coppia di radio è di 400 d.
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
Figura 2.3: Immagine della radio XTend-PKG.
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
Sul mercato, tuttavia, esistono soluzioni che comprendono il solo chip ra-dio. In tal senso, un esempio è fornito ancora dall’azienda Laird Technologies con il modello AC4424 (Figura 2.5). Di fatto, questo è l’integrato utilizzato all’interno del ConnexLink 4424, e pertanto le prestazioni del modulo sono le medesime. Il prezzo di mercato per una coppia di moduli radio è di 75 d. Il
Figura 2.5: Immagine del modulo radio AC4424.
prezzo è decisamente più basso perché, quello venduto è semplicemente il chip radio; non sono presenti, ad esempio, circuiti di condizionamento o circuiti per la regolazione della tensione di alimentazione.
Una soluzione alternativa è rappresentata, invece, dal Telit GT863-PY, un dispositivo quad-band che utilizza le tradizionali reti GSM/GPRS. Data la sua natura, questo prodotto necessita di una SIM card e di un abbonamento con un gestore di telefonia mobile. In questo caso non ha senso parlare di copertura del segnale; essa dipende fortemente dalla dislocazione delle antenne del gestore scelto. La radio presenta una porta seriale RS-232 con supporto per i comandi AT e baud-rate fino a 115200 bps. Il prezzo di mercato del dispositivo è di 350 d la coppia. Per maggiori informazioni, e per conoscere tutte le funzioni supplementari messe a disposizione dal dispositivo, è consigliabile visitare il sito del produttore http://www.telit.com.
A riprova del fatto che dispositivi come quello appena analizzato vengono utilizzati nell’ambiente del motorsport, si può citare l’azienda MoTeC, leader nel settore motoristico. Nel suo catalogo la MoTeC offre, infatti, un kit di
2.3. STATO DELL’ARTE CAPITOLO 2. LA TELEMETRIA
Figura 2.6: Immagine del disporitivo radio GT863-PY.
espansione per la telemetria basato su un dispositivo GSM della Siemens. In Figura 2.7 è mostrata l’immagine del modulo radio. Il sistema di telemetria è venduto insieme al software Telemetry Monitor per l’analisi dei dati in tempo reale, ed è dotato di tutti i cavi per il collegamento con le centraline motore e i datalogger dell’azienda. Il prezzo di vendita è di 850 d.
Figura 2.7: Immagine del modem GSM Siemens all’interno del kit di telemetria MoTeC.
2.4. LA TELEMETRIA DELL’ ET3 CAPITOLO 2. LA TELEMETRIA
2.4
La telemetria dell’ ET3
Dopo la breve panoramica sui dispositivi che costituiscono l’elettronica dell’ET3, e dopo aver visto le soluzioni commerciali che attualmente il mercato propone nel settore delle corse automobilistiche, l’attenzione viene spostata verso il sistema di telemetria realizzato in questo lavoro di tesi.
In questo paragrafo, tuttavia, non si entra nel merito del progetto hardware e software, di cui invece, si parlerà ampiamente nei prossimi due capitoli, ma si descrive per grandi linee il sistema realizzato: le specifiche inseguite, le prestazioni ottenute, e le sue funzionalità.
L’idea di un sistema di telemetria per l’ET3 nasce sostanzialmente dall’e-sigenza del team di monitorare costantemente i parametri funzionali della vet-tura, in particolar modo durante le fasi di test. Questa è, infatti, una delle fasi più critiche di tutto il progetto, oltre quella in cui eventuali errori progettuali vengono messi in evidenza. Aver la possibilità di visionare il comportamento della macchina in tempo reale, velocizza l’individuazione di un guasto o di un malfunzionamento della vettura. Ad esempio, la lettura in tempo reale della temperatura motore sull’ET3 si è rivelata fondalmentale duranti i test condotti in aeroporto. Si è evitato, infatti, di portare il motore oltre le massime tem-perature di esercizio, a causa di un problema al radiatore della macchina. Un semplice data-logger non sarebbe stato mai in grado di evidenziare il problema in tempo utile, ed evitare così un guasto serio alla vettura. Si comprende bene come un sistema di telemetria sia fondamentale anche per una vettura con prestazioni di certo non paragonabili alla Formula 1.
Le specifiche di base richieste per questo sistema possono essere cosi rias-sunte:
Sistema complessivo
• Due moduli: unità di bordo e unità PC.
• Copertura radio almeno di 1 km.
• Interfaccia grafica per la visualizzazione in tempo reale delle informazioni provenienti dalla vettura.
2.4. LA TELEMETRIA DELL’ ET3 CAPITOLO 2. LA TELEMETRIA
• Interfaccia grafica per la gestione del link radio.
• Costi contenuti (inferiori a 500 d) per non gravare significativamente sul budget del team.
Unità di bordo
• Alimentazione da batteria auto.
• Eventuale protezione da spike di corrente-tensione.
• Assorbimento in corrente contenuto (minore di 1 A) per non gravare significativamente sull’assorbimento totale della vettura.
• Interfaccia configurabile per l’acquisizione e la trasmissione di informa-zioni sulla rete CAN.
• Peso ed ingombri contenuti per non inficiare sulle prestazioni del veicolo.
Unità PC
• Interfaccia USB 2.0 per il trasferimento dei dati con il PC e l’alimenta-zione dell’unità (500 mA @ 5 V).
• Peso ed ingombri contenuti per agevolare il trasporto e l’utilizzo.
Alla luce di quanto visto nel paragrafo precedente, le soluzioni commerciali per un sistema di telemetria completo e di buona fattura si aggirano attorno al migliaio di euro. Sebbene questa spesa non sia proibitiva per le finanze del team, dal confronto pesato dei vantaggi e degli svantaggi di un approccio custom del problema, è prevalsa l’idea di realizzare in casa il sistema di tele-metria per l’ET3. Sono, infatti, molteplici i fattori che concorrono a favore di questa scelta. In primo luogo la possibilità di realizzare un sistema su misura per l’elettronica della vettura, e al tempo stesso ricollocabile in altre discipli-ne sportive (gare motociclistice, gare di vela etc...). La possibilità, quindi, di scegliere il componente che, meglio di tutti, risponde alle esigenze del caso. In secondo luogo la possibilità di realizzare un sistema che sia configurabile per
2.4. LA TELEMETRIA DELL’ ET3 CAPITOLO 2. LA TELEMETRIA
rete CAN. In terzo luogo la possibilità di avere un oggetto integrabile con l’ap-plicativo LabVIEWr già esistente per controllare le impostazioni del cambio. Per ultimo, ma non per importanza, il contenimento dei costi; un approccio custom del problema, infatti, garantisce molto spesso una riduzione della spesa complessiva. Di contro, l’obbligo di dover curare tutti gli aspetti del problema, dall’architettura del sistema alla scelta dei componenti, dalla codifica dei dati alla realizzazione di un’interfaccia grafica.
Il risultato finale a cui si è giunti dopo 7 mesi di lavoro, distribuiti tra progettazione, realizzazione e collaudo del sistema, è mostrato in Figura 2.8. Come richiesto nelle specifiche di progetto, il sistema di telemetria si compone di due unità: unità PC e unità di bordo (in Figura 2.8 rispettivamente a sini-stra e a desini-stra). Le due unità comunicano tramite un link radio nella banda
Figura 2.8: Immagine del sistema di telemetria dell’ET3: unità PC e unità
di bordo.
ISM (Industrial, Scientific and Medical) a 2.4 GHz (2.400-2.4835 GHz), con un raggio di copertura dell’ordine di 1 km (in campo libero). L’elaborazio-ne e il calcolo computazionale è, invece, svolto da due dispositivi a controllo di programma. Il protocollo di comunicazione implementato è relativamente semplice, con poche informazioni di servizio. La comunicazione è bidirezionale, quindi, è possibile non solo ricevere dati dalla vettura, ma si possono anche inviare informazioni nella direzione opposta. Il programma LabVIEWr
E-Team Telemetry permette, invece, di gestire il link radio (fare un check sullo
2.4. LA TELEMETRIA DELL’ ET3 CAPITOLO 2. LA TELEMETRIA
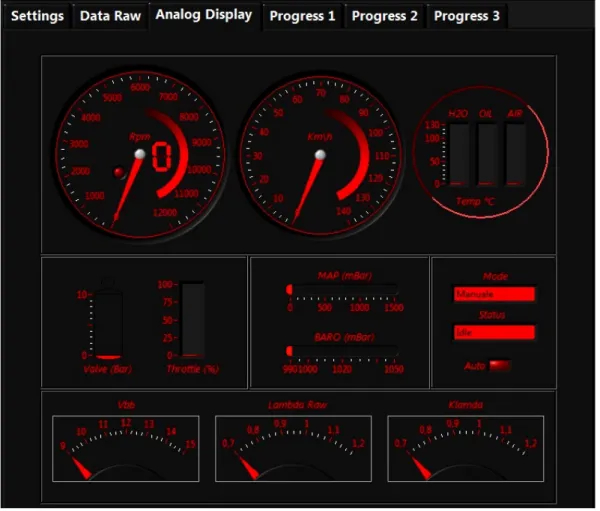
tutte le informazioni provenienti dalla vettura. Queste giungono dalla centra-lina motore, dalla centracentra-lina del cambio e dalla dashboard unit. Allo stato attuale il sistema non è in grado di ricevere le informazioni interne al datalog-ger (posizione, accelerazione, imbardata), poichè il dispositivo non è in grado di trasmettere sulla rete CAN. In Figura 2.9 è riportato lo screenshot della schermata Analog Display in cui sono mostrati alcuni dei parametri acquisiti per mezzo del sistema. Sul frontalino dell’unità PC è presente un connettore
Figura 2.9: Screenshot della finestra Analog Display del software E-Team
Telemetry.
USB (tipo B) per la connessione dati e l’alimentazione della scheda. Sono presenti, inoltre, due led per monitorare lo stato del sistema complessivo. In particolare il led rosso (Data), quando è acceso, indica che è in corso un
tra-2.4. LA TELEMETRIA DELL’ ET3 CAPITOLO 2. LA TELEMETRIA
sferimento dati verso il PC, mentre il led blu (Link), quando è acceso, indica che il link radio tra i due moduli è attivo. La scatola scelta per l’unità PC è prodotta dalla HAMMOND, e il modello è il 1598-BBBK (dimensioni esterne 36x154x179 mm3). L’alloggiamento è quello tipico per uno strumento di misu-ra, e il materiale di costruzione è plastica ABS (IP Rating 54) con frontalino anteriore e posteriore in alluminio. L’estetica del contenitore è stata impre-ziosita con il logo della squadra; questo è stato realizzato grazie ai dottorandi di ricerca della divisione di elettronica mediante la fresa a controllo numerico presente in officina. La scatola scelta per l’unità di bordo è prodotta, invece, dalla CINCH, e il modello è il 581-01-30-043 (dimensioni esterne 52x153x134 mm3). Il contenitore (utilizzato anche per la centralina del cambio) è specifico
per applicazioni automotive, e il materiale di costruzione è ancora ABS (IP Rating 67).
Il costo finale per la realizzazione del sistema di telemetria è di 310 d; ciò ha permesso un notevole risparmio nel budget di spesa del team. Tuttavia, il prezzo è comprensivo del solo materiale acquistato, e non include, quindi, il lavoro di progettazione del sistema, lo sviluppo del software di analisi, e il collaudo del sistema.
Il sistema di telemetria realizzato è pienamente configurabile e interfac-ciabile con altri dispositivi che operano su rete CAN. Questo rappresenta un grosso vantaggio rispetto alle soluzioni che il mercato propone, dove spesso si è vincolati all’utilizzo di unità dello stesso produttore.
Capitolo 3
L’Hardware
Questo capitolo è dedicato al progetto hardware del sistema di telemetria. Nella prima parte del capitolo viene descritta l’architettura del sistema e vengo-no presentati i componenti utilizzati. Nella seconda parte, invece, l’attenzione viene spostata sul disegno del PCB e sull’uso del software KiCad. Infine, nel-l’ultima parte del capitolo viene fatto un breve cenno sul software WINGS 3D, utilizzato per la creazione dei modelli tridimensionali di molti componenti di sistema.
3.1
Architettura del sistema
A conclusione del capitolo precedente è stato evidenziato come, in fase di progetto, sia prevalsa l’idea di realizzare il sistema di telemetria sfruttando i mezzi messi a disposizione dal laboratorio di Sistemi Elettronici presso il Di-partimento di Ingegneria dell’Informazione e dal team. La soluzione adottata prevede la costruzione, su PCB, di due moduli a componenti discreti (unità PC e unità di bordo) in grado di stabilire un trasferimento dati wireless. A tal proposito si è scartata sin dall’inizio la possibilità di realizzare in casa i due moduli radio, e si è preferito dotare ciascuna delle due schede di un chip radio realizzato da terze parti. Le motivazioni di questa scelta sono da ricer-care essenzialmente nella facilità di reperire oggi sul mercato moduli radio a
3.1. ARCHITETTURA DEL SISTEMA CAPITOLO 3. L’HARDWARE
prezzi molto contenuti, e pratici da installare su scheda (un esempio è il mo-dulo AC4424 presentato nel capitolo precedente). La maggior parte di queste radio, inoltre, è dotata di periferica seriale con logica CMOS o LVTTL (3.3-5 V), e questo permette un facile interfacciamento con gli attuali dispositivi per l’elaborazione dei dati.
La gestione del sistema e l’elaborazione delle informazioni, è stata affidata a due dispositivi a controllo di programma. A questo proposito la scelta è ri-caduta su un microcontrollore piuttosto che su un DSP (Digital Signal Proces-sor), dato il modesto carico computazionale richiesto, e l’assenza di operazioni particolari come divisioni, moltiplicazioni, e trasformate di Fourier. Oltre-tutto, il microcontrollore permette una gestione più semplice del firmware, e rappresenta una soluzione più economica.
Una scelta importante, e che ha condizionato in modo significativo il proget-to hardware, è stata quella di definire un’unica piattaforma PCB per entrambe le unità del sistema. Per rendere ciò possibile, si è dovuto pensare ad un’archi-tettura madre che comprendesse tutte le funzionalità delle due unità, sia PC, che di bordo. Considerando, quindi, tutte le specifiche hardware del sistema, e la necessità di avere un’unica struttura fisica, si è giunti all’architettura madre mostrata in Figura 3.1. Lo schema prevede naturalmente un’interfaccia con la rete CAN, e un’interfaccia USB per il collegamento con il PC. Sebbene que-ste non si trovino mai a convivere nella medesima unità (l’interfaccia CAN è presente solo nell’unità di bordo, mentre l’interfaccia USB è propria dell’uni-tà PC), essendo il progetto unico, queste devono essere considerate entrambe nell’architettura madre. L’immagine mostra, inoltre, una sezione dedicata ai canali analogici, e una sezione dedicata agli input/output digitali ausiliari (5 V CMOS). Sebbene queste due sezioni non figurino tra le specifiche di proget-to, esse rappresentano due funzionalità aggiuntive dell’unità di bordo, e sono attivabili tramite un upgrade del firmware.
A proposito della decisione di realizzare un’unica piattaforma PCB, si po-trebbero sollevare contro diverse obiezioni. Una di queste ad esempio, potrebbe essere data dalla mancata ottimizzazione delle dimensioni fisiche della scheda,
3.1. ARCHITETTURA DEL SISTEMA CAPITOLO 3. L’HARDWARE
Figura 3.1: Schema a blocchi dell’architettura madre del sistema di telemetria.
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
in quanto l’architettura risulta più complessa e dunque più ingombrante. In altri termini se si fosse pensato alle due unità in modo indipendente, le dimen-sioni finali delle due schede PCB sarebbero risultate minori. Inoltre, l’avere un’unità PC con dimensioni contenute (basti pensare alle dimensioni di una comune penna USB) agevola l’utilizzo del sistema laddove non è disponibile una base d’appoggio. D’altro canto però, sono diversi i vantaggi che giocano a favore della scelta fatta. In primo luogo si è reso necessario il disegno di un solo PCB. In secondo luogo si è potuto limitare il numero delle schede di ricambio; ogni scheda, infatti, può essere utilizzata per realizzare una delle due unità a seconda delle necessità. Infine, poichè i componenti elettronici che diversificano le due unità sono in numero limitato, è possibile pensare di trasformare un’unità nell’altra intervenendo con poche operazioni di saldatura (fattore del tutto non trascurabile quando si hanno poche unità di ricambio).
3.2
I componenti
In questa sezione vengono presentati i componenti elettronici utilizzati per la realizzazione del sistema. Il fattore economico ha avuto un ruolo fonda-mentale nella scelta dei componenti, e questo per rispondere all’esigenza del contenimento dei costi, cosi come il fattore prestazione, al fine di raggiungere un buon compromesso qualità/prezzo. Un altro criterio di selezione importante è stato quello di orientarsi verso componenti facili da saldare manualmente, e questo per evitare di richiedere la consulenza di ditte esterne. Infine, dove è sta-to possibile, la scelta è stata rivolta a prodotti austa-tomotive, vista l’applicazione del sistema.
3.2.1
Il microcontrollore
Più volte, nel corso di questa tesi, si è accennato a come sia stata affida-ta ad un dispositivo a controllo di programma, ed in particolar modo ad un microcontrollore, la gestione della singola unità di sistema. Il costo, la to-tale assenza di operazioni numericamente elaborate (divisioni, moltiplicazioni
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
etc...), e l’esiguo carico computazionale sono stati i parametri decisivi che han-no fatto propendere a favore di questa scelta, piuttosto che verso l’uso di un DSP. Oltretutto in commercio sono presenti microcontrollori che integrano già al loro interno alcune interfaccie per il collegamento diretto con le periferiche di sistema (interfaccia SPI, UART, I2C etc...), e questo ne favorisce l’impiego anche su sistemi complessi e distribuiti.
Entrando nel merito della scelta del microcontrollore, le specifiche di pro-getto e l’architettura madre del sistema sono state determinanti per la ricerca del componente desiderato. I requisiti minimi richiesti al componente sono elencati di seguito:
• Controller per la gestione del traffico di informazioni sulla rete CAN.
• Interfaccia USB per la comunicazione diretta con il PC.
• Interfaccia UART per il controllo e lo scambio di informazioni con la radio.
• Modesta capacità di calcolo.
La scelta è ricaduta sul microcontrollore AT90CAN64 della ATMEL, impie-gato anche all’interno della GCU e della dashboard unit. Le caratteristiche principali del dispositivo sono elencate di seguito:
• Throughput fino a 16 MIPS @ 16 MHz.
• 64 KB di memoria flash dedicati al firmware, con la possibilità di riservare una sezione per il caricamento del bootloader.
• 4 KB di memoria SRAM, e 4 KB di memoria EEPROM.
• Interfaccia SPI e I2C.
• 2 USART (Universal Synchronous and Asynchronous Serial Receiver and Transmitter) con baud rate fino a 1 Mbps.
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
• Controller CAN 2.0A - 2.0B, con la possibilità di gestire in parallelo fino a 15 messaggi indipendenti.
• 2 contatori a 8 bit e 2 a 16 bit.
• Convertitore ADC (SAR) a 8 canali e risoluzione 10 bit.
• Programmazione ISP.
• Package TQFP64.
Esistono altre due versioni del dispositivo: l’AT90CAN32 e l’AT90CAN128. Ciò che cambia è sostanzialmente la dimensione della memoria flash, 32 e 128 KB rispettivamente.
Il microcontrollore scelto non ha una interfaccia specifica per il collega-mento USB, ma possiede, tuttavia, due periferiche USART. Proprio una di queste è utilizzata, insieme all’integrato FT232RL della FTDI, per il collega-mento USB con il PC. L’FT232 è un chip molto diffuso nella progettazione elettronica di sistemi a componenti discreti, ed è largamente impiegato come interfaccia UART-USB. Il dispositivo ha 1 KB di memoria EEPROM, e su questa sono memorizzati i parametri di configurazione della porta USB (ad esempio la corrente massima da negoziare con il bus USB 2.0). L’FTDI mette, inoltre, a disposizione dell’utente dei driver compatibili con i più diffusi sistemi operativi (Windows, Linux, Mac OS), che trasformano la USB in una semplice porta virtuale (Virtual Com Port). Questo consente l’utilizzo di software come HyperTerminal o simili per comunicare con il PC. La seconda USART, invece, è utilizzata per la comunicazione dati con il modulo radio. Il baud rate delle USART è regolabile, e può arrivare fino a 1 Mbps. In particolare, la USART-USB comunica a 500 kbps, mentre la USART-radio lavora a 200 kbps. Questi valori sono stati scelti per rispondere ad esigenze di sistema che appariranno chiare nel proseguo.
L’AT90CAN64 integra al suo interno anche un controller CAN compatibile con le specifiche 2.0A (CAN Standard) e 2.0B (CAN Extended). Il controller è in grado di gestire contemporaneamente fino a 15 messaggi CAN con ID
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
diverso tramite opportune strutture chiamate MObs (Message Objects). Nel computo totale dei messaggi si considerano sia i messaggi in ricezione che quelli in trasmissione. Si può gestire anche un set di messaggi con il medesimo identificatore, e questo per rispondere all’esigenza di dover trattare messaggi CAN frammentati. In modo analogo al caso precedente, il set non può eccedere la dimensione massima di 15 messaggi; questo è, infatti, un limite hardware. Nell’attuale sistema di telemetria sono in uso 11 MObs, di cui dieci in ricezione e una in trasmissione (per la bidirezionalità del sistema). Il controller, tuttavia, non è in grado gestire la comunicazione sul bus CAN da un punto di vista elettrico. Le linee del bus (CAN-H e CAN-L) richiedono, infatti, tensioni di pilotaggio differenziali; il livello logico ‘0’ (dominante) è tradotto con una tensione differenziale pari o superiore a 2 V, e il livello logico ‘1’ (recessivo) è tradotto con una tensione differenziale nulla. Le tensioni a modo comune possono variare, invece, da -2 V per il CAN-L a +7 V per il CAN-H. Per questo motivo, esternamente al microcontrollore, è stato utilizzato l’integrato MCP2551 della MICROCHIP, un transceiver CAN con funzioni di driver. Uno switch esterno montato su PCB permette, poi, di inserire o meno la resistenza da 120 W per la terminazione del bus.
L’AT90CAN64 possiede anche un convertitore ADC a 8 canali e risoluzione massima 10 bit. Quest’ultimo, però, non è ad oggi utilizzato dal sistema di telemetria. Nel progetto PCB, tuttavia, è stata prevista la possibilità di utilizzare 2 canali del convertitore per eventuali acquisizioni a bordo della vettura. A discrezione dell’utente è anche possibile implemetare un filtro RC del primo ordine sulla pista che collega l’ADC al connettore dell’unità di bordo. La buona disponibilità di porte I/O (7 per l’esattezza, dalla A alla G) è un altro elemento di spicco del microcontrollore. Grazie a questa peculiarità, infatti, è stato possibile riservare alcuni pin del microcontrollore (5 V CMOS) a funzioni GPIO ausiliarie.
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
3.2.2
La radio
Tra tutti i componenti che caratterizzano la telemetria, il modulo radio è senza dubbio quello più importante. Dalle sue caratteristiche e dalle sue prestazioni, infatti, dipendono molte delle funzionalità del sistema complessivo. Si comprende bene, quindi, come la scelta del modulo radio sia stata cruciale in fase di progettazione. Anche in questo caso, la selezione del componente è stata guidata dai target di progetto rispondenti alle specifiche di sistema. In elenco, i requisiti minimi richiesti:
• Banda di frequenze possibilmente non licenzata.
• Raggio di copertura ≥ 1 km.
• Antenna esterna, per facilitare il montaggio del sistema ed evitare pro-blemi di schermatura (carene in fibra di carbonio).
• Interfaccia seriale con baudrate ≥ 57.6 kbps.
• Assorbimento in corrente ≤ 400 mA, e tensione operativa ≤ 5 V (USB 2.0).
• Dimensioni contenute e predisposizione all’installazione su PCB.
Le soluzioni commerciali che rispondono alle specifiche richieste sono nume-rose. Per restringere il campo di ricerca si è dovuto stabilire sin da subito quale dovesse essere la banda di frequenza da utilizzare. Cercando di rispon-dere all’esigenza di avere un prodotto che non richiedesse una licenza d’uso, ma che fosse allo stesso tempo regolamentata da una normativa ben precisa, la scelta è ricaduta sulla banda ISM (Industrial, Scientific and Medical) 2.4 GHz. Si tratta di una banda di frequenze assegnata dal piano di ripartizione delle frequenze di ciascuna nazione, e nasce per scopi industriali, scientifici e medici. In Italia la normativa in vigore (Art. 105 comma 1 - D.L.vo. 259 2003) stabilisce l’uso collettivo della banda ISM 2.4 GHz, purchè gli apparati siano conformi alle normativa europea (ETSI - EN 300 328). La limitazione
3.2. I COMPONENTI CAPITOLO 3. L’HARDWARE
più significativa della normativa, riguarda la massima potenza equivalente ir-radiata (EIRP). Con riferimento ad un’antenna isotropica, la massima potenza trasmissiva è di 100 mW (20 dBm). In questo senso, la normativa statunitense 47 CFR 15.247 dell’organo competente in materia (FCC), è meno restrittiva; infatti, la massima potenza irradiata è di 200 mW.
Sul mercato esistono molti dispositivi che lavorano nella banda ISM 2.4 GHz, tuttavia, la scelta del modulo radio è stata circoscritta a tre modelli, simili per prestazioni e prezzo. Le caratteristiche principali sono messe a con-fronto nella tabella riportata di seguito.
Come da specifica le radio operano nella banda ISM 2.4 GHz, e tutte sono conformi allo standard 802.11 definito dall’IEEE nel 1997. Nella sua versione iniziale lo standard specifica sia le funzioni dello strato MAC (Medium Access