Capitolo 2
Modelli subject-specific agli elementi finiti del femore
2.1 Metodo degli elementi finiti
Il metodo numerico più diffuso per la risoluzione di problematiche legate alla dinamica delle strutture è il metodo degli elementi finiti (FEM) che riduce una integrazione di equazioni differenziali in un dominio continuo (caratterizzato quindi da un numero infinito di incognite) ad un problema discreto, caratterizzato quindi da un numero finito di gradi di libertà e descritto da un sistema di equazioni algebriche.
Pur permettendo una formulazione matematicamente coerente e meccanicamente ben fondata del problema strutturale, l'approccio continuo produce equazioni difficili da risolvere nel caso generale. Anche nell’ambito di validità dell'ipotesi di piccoli spostamenti, soluzioni di problemi concreti sono disponibili solo per un certo numero di casi particolari, per lo più limitatamente al comportamento linearmente elastico del materiale. Tali soluzioni sono indubbiamente importanti, ma non esaustive dei problemi di interesse ingegneristico.
Il metodo degli elementi finiti ha una formulazione di estrema versatilità, applicabile in un contesto molto generale.
Nel metodo degli elementi finiti il continuo viene suddiviso in un numero finito di regioni, definite appunto elementi finiti, caratterizzate da forme semplici e un volume proprio, e si stabilisce il modello di spostamento individualmente per ognuno di essi.
Figura 2.1: esempio di elementi finiti
Viene dunque definito il comportamento di ogni singolo elemento, mentre quello dell'intera struttura viene poi ricostruito assemblando gli elementi di cui è composta, che si immaginano connessi tra di loro e con il supporto esterno solo in un numero discreto di punti dell'elemento, denominati nodi.
Le incognite sono rappresentate da quei valori assunti dalla variabile di interesse nei punti nodali. È quindi sufficiente determinare le proprietà di alcuni elementi fondamentali che si ripetono più volte nella struttura che possono essere utilizzati anche con riferimento a strutture diverse per forma e condizioni di vincolo e di carico.
Il calcolo delle proprietà degli elementi e il loro assemblaggio richiedono operazioni di natura ripetitiva, affidabili quasi per intero a programmi di calcolo.
È questa a grandi linee l'idea alla base dell'approccio agli spostamenti del metodo degli elementi finiti.
Essa è suggerita da alcuni sistemi strutturali, quali travature reticolari o telai, che si presentano direttamente come assemblaggi di un numero finito di costituenti. L'idea di sostituire l'assemblaggio fisico con una suddivisione astratta del mezzo continuo sembra essere stata avanzata per la prima volta da Edward Study nel 1903 e successivamente riproposta da altri autori in epoche in cui i mezzi di calcolo automatico non erano ancora disponibili alla pratica ingegneristica. Essa ha quindi suscitato limitato interesse a causa del notevole onere computazionale che la sua applicazione comportava.
In effetti al metodo degli elementi finiti viene convenzionalmente attribuita una data di nascita precisa: il 1956, anno di pubblicazione di un lavoro di Turner, Clough, Martin e Topp.
L'importanza di questo lavoro non può essere compresa se non in relazione a un evento accaduto solo due anni prima, quando è stato reso disponibile il primo linguaggio simbolico, battezzato col nome di FORTRAN (FORmula TRANslator language).
Gli strumenti di calcolo sono da allora divenuti supporti quotidiani di ogni attività tecnica e, in questo contesto, il lavoro sopra citato si è configurato come la prima proposta di un procedimento effettivamente capace di fornire la soluzione di un gran numero di problemi insolubili.
Il metodo degli elementi finiti e il suo straordinario successo sono quindi legati alla disponibilità di potenti mezzi di calcolo.
Più che su di un rinnovamento dei fondamenti meccanici del problema strutturale, esso si basa su di una loro riorganizzazione che li adatta alle esigenze dell'automatizzazione del processo risolutivo. Ne è risultato un procedimento estremamente potente e versatile, che in linea di principio consente la soluzione di qualunque problema, non solo strutturale, affidando quasi per intero alla macchina l'onere di calcolo.
Si riportano ora le fasi successive dell'approccio agli spostamenti che si articola nella seguente sequenza logica di operazioni, come viene descritto da (Corradi Dell’acqua).
1) Definizione di uno schema discreto.
In generale una struttura non si presenta naturalmente come assemblaggio di costituenti elementari, occorre pertanto operare una suddivisione in elementi finiti tra loro connessi in alcuni punti detti nodi. Questa suddivisione definisce lo schema oggetto del calcolo.
Gli spostamenti locali vengono approssimati da combinazioni lineari di funzioni assegnate, di regola polinomi.
I due aspetti non sono tra loro indipendenti: è infatti evidente come una suddivisione più grossolana necessiti di un modello più ricco e complesso rispetto al caso di una suddivisione fitta.
È questa la fase cruciale del procedimento poiché una volta suddivisa la struttura in elementi finiti e stabilito il modello di spostamento al loro interno, sono completamente determinate le caratteristiche di comportamento dello schema discreto con cui si approssima il problema originario. 2) Definizione delle proprietà dell'elemento.
Il modello viene espresso in funzione dei valori assunti dagli spostamenti locali nei nodi. A tali valori (spostamenti nodali u) corrispondono tramite un'equivalenza in termini di lavori virtuali, le forze nodali p.
Il comportamento dell'elemento isolato è descritto da un legame tra queste quantità, cui si risale dalla legge costitutiva del materiale. Nel caso elastico lineare questo si esprime attraverso una relazione simile a p = k u, dalla quale può differire soltanto per la presenza di un termine noto rappresentativo di carichi eventualmente agenti sull'elemento.
3) Assemblaggio.
L'operazione ricostruisce la continuità della struttura: i vari elementi vengono tra loro collegati imponendo che gli spostamenti dei nodi che hanno in comune assumano lo stesso valore. L’assemblaggio si riconduce ad una procedura di identificazione a partire da poche semplici informazioni come il numero di nodi, le coordinate degli stessi, gli eventuali carichi e vincoli, ecc. Dal momento che questi sono ora tutti rappresentati nello stesso riferimento, risultano direttamente sovrapponibili.
L’assemblaggio comprende l'eliminazione degli spostamenti impediti dai vincoli esterni o l'imposizione di cedimenti vincolari se diversi da zero.
4) Calcolo della soluzione.
Ad assemblaggio effettuato le equazioni risolventi si presentano, nel caso lineare, nella formula P = K U, dove la matrice K è simmetrica e definita positiva.
La soluzione numerica non presenta difficoltà particolari se non per il numero di incognite spesso elevato.
La soluzione va in genere completata fino alla definizione dello stato di sforzo. Come in tutte le formulazioni basate su modelli cinematici, l'informazione sul regime tensionale è prodotta in termini di sforzi generalizzati.
Essendo però questi di difficile interpretazione diretta si preferisce calcolare direttamente gli sforzi locali imponendo il legame costitutivo del materiale con riferimento alle deformazioni , note in ogni punto della struttura, una volta valutati gli spostamenti nodali.
Va tenuto presente che gli sforzi sono proporzionali a derivate di spostamenti e sono quindi affetti dal deterioramento di precisione che la derivazione comporta. Si riscontrano spesso errori anche notevoli sugli andamenti locali che rendono necessari interventi correttivi. Questi vengono comunque effettuati a valle della soluzione dello schema discreto, elaborando in modo opportuno le informazioni direttamente prodotte dal metodo.
2.2 Modelli Subject-specific
La possibilità di determinare gli stress e i livelli di strain meccanici che le attività fisiologiche inducono nelle ossa umane è un fattore di grande importanza sia nella ricerca che nella pratica clinica.
Nella ricerca è essenziale per lo studio di vari fenomeni meccano-biologici, per la capacità che tali informazioni hanno di portare alla formulazione di ipotesi e criteri relativamente a predizioni sul rischio di frattura nei soggetti con bassa densità ossea, ma anche per l’analisi di tutta una serie di modificazioni biologiche che si possono generare in seguito ad uno sbilanciamento tra stress meccanico e capacità del tessuto osseo stesso di sostenerlo; nella pratica clinica invece, qualora questi strumenti si dimostrassero robusti, permetterebbero di effettuare scelte cliniche più efficaci, sia dal punto di vista diagnostico, che del trattamento: ad esempio per pianificare una riabilitazione specifica per il soggetto in seguito a procedure di salvataggio di arto, ma anche per la progettazione ed ottimizzazione di dispositivi protesici, o valutazioni nelle ricostruzioni dello scheletro.
La Biomeccanica Clinica mira a rafforzare il legame tra clinica e laboratorio di ricerca biomeccanica per aiutare nella spiegazione delle cause dei disturbi muscolo-scheletrici fornendo conoscenze che contribuiscano al miglioramento della gestione clinica (Viceconti, Olsen, Nolte, & Burton, 2005).
Sebbene, soprattutto in passato, molti studi nella ricerca ortopedica si siano basati su anatomie generiche al fine di tracciare conclusioni di carattere medio o generale, è oggi molto più utile e spesso necessario, considerando la grande variabilità tra i soggetti, andare a studiare individualmente le peculiari caratteristiche morfologiche e meccaniche del segmento osseo in
esame.
Purtroppo gli stress meccanici nelle ossa non possono essere misurati nei soggetti viventi senza l'utilizzo di procedure chirurgiche invasive, in generale eticamente inaccettabili.
Pertanto l'unico modo per poter avere una stima delle sollecitazioni meccaniche sulle ossa in vivo in maniera non invasiva, è mediante una modellazione agli elementi finiti subject-specific.
Questa procedura permette la creazione di modelli numerici dei segmenti ossei a partire da immagini provenienti da tomografia computerizzata (CT), tecnica diagnostica per immagini che attualmente costituisce la più attendibile fonte di informazioni sulla morfologia e le proprietà meccaniche dei segmenti scheletrici di un soggetto vivente.
Questi modelli sono dunque uno strumento promettente per valutare lo stato di stress delle ossa nei singoli pazienti e al momento questo tipo di analisi rappresenta la migliore sorgente di informazione, applicabile in vivo, relativamente al comportamento meccanico dell’osso. Sono due però le caratteristiche principali che questa modellazione deve considerare per poter essere effettivamente utilizzata clinicamente.
Da una parte è necessario un alto livello di automazione affinché i tempi dello studio siano compatibili con i tempi e le esigenze della pratica clinica.
Dall’altra è richiesta un’elevata accuratezza nella predizione degli strain al fine di investigare le condizioni limite dell’osso ed eventualmente definire fattori di rischio di frattura, dato il crescente consenso nell’utilizzo di criteri di cedimento e rottura basati sugli strain per il tessuto osseo (Schileo, Taddei, Malandrino, Cristofolini, & Viceconti, 2007).
L’accuratezza complessiva dei modelli subject-specific rischia però di non essere ottimale in alcune regioni anatomiche particolari dove la complessità morfologica risulta essere elevata, quali ad esempio le epifisi delle ossa lunghe.
Queste regioni, che spesso risultano essere di grande interesse, sono di solito caratterizzate da un volume di osso spugnoso circondato da un sottile spessore di tessuto corticale, caratteristica questa difficilmente catturabile con una strategia di mesh automatica.
Inoltre queste regioni, come ad esempio il collo femorale, presentano più curvature che tendono a peggiorare la qualità delle immagini con l'aumento di artefatti nelle immagini CT.
È pertanto necessaria un’attenta valutazione sull’accuratezza e sulla precisione di questi modelli FE subject-specific prima che possano essere utilizzati efficacemente nella pratica clinica.
Qui di seguito verrà descritta la procedura per la generazione dei modelli di femore a livello d’organo utilizzata presso gli Istituti Ortopedici Rizzoli, trattando in maniera approfondita ogni singola fase di modellazione.
Figura 2.2: Schema della procedura subject-specific di modellazione FEM per la porzione prossimale del femore
Questi modelli agli elementi finiti subject-specific sono generati, con una buona accuratezza, a partire da un dataset CT utilizzando una procedura che può essere riassunta nei seguenti step principali: 1 estrazione della geometria 3D dell'osso; 2 generazione della mesh agli elementi finiti; 3 mappatura delle proprietà meccaniche del tessuto osseo disomogeneo sulla mesh (Fulvia Taddei, Cristofolini, Martelli, Gill, & Viceconti, 2006).
2.3 Segmentazione
Acquisizione di immagini CT
La tomografia computerizzata (CT) è una metodica diagnostica per immagini che sfrutta radiazioni ionizzanti (raggi X) e consente di riprodurre sezioni corporee bidimensionali del paziente, nonché ricostruire da queste la sua immagine tridimensionale.
È computerizzata in quanto per la riproduzione delle immagini è necessario l’intervento di un elaboratore di dati.
La tomografia si ottiene tramite un fascio collimato di raggi X che attraversano il paziente e da questo vengono attenuati. È possibile definire il rapporto tra l’intensità dei raggi X che hanno attraversato il paziente (I) e i raggi X primari (Io).
Questo rapporto dipende dallo spessore e dalla densità dell’oggetto attraversato e, sulla base di esso, si può definire la funzione di proiezione come:
P(x) = log [Io/I] = *x
con x spessore del paziente e coefficiente di attenuazione lineare.
Ciò che si vuole ottenere alla fine della procedura è un dato quantitativo, si vuole cioè risalire al valore del coefficiente di attenuazione lineare di elementi volumetrici definiti voxel, costituenti il volume CT.
L’immagine finale della CT è costituita pertanto da una distribuzione di livelli di grigio, definiti anche come valori CT o Hounsfield Units (HU), che rappresentano dei valori interi di densità dell’osso normalizzati al valore di riferimento dell’acqua.
HU = [[μ − μ(water)] / μ(water)] * 1000
Tabella 2.1: Tabella che indica i range tipici di HU relativi ai vari tessuti
Le immagini CT costituiscono attualmente la migliore fonte di informazione per la costruzione di un modello subject-specific di un segmento osseo, poiché essendo il coefficiente di assorbimento del tessuto osseo molto più elevato di quello dei tessuti circostanti, l’immagine produce elevati contrasti che portano più agevolmente alla delimitazione dei contorni. Nonostante questo l’immagine può presentare artefatti legati ad effetti di volume parziale, errori determinati dalla non perfetta identificazione dei contorni superficiali del segmento osseo.
Definizione della superficie esterna
Per quanto riguarda la fase vera e propria di segmentazione, e quindi l’individuazione della superficie di contorno del segmento osseo, esistono dei codici commerciali che fanno uso di vari algoritmi più o meno automatizzati.
In questo lavoro di tesi i dataset CT ottenuti sono stati segmentati mediante l’utilizzo del software Amira 3.1.1, Mercury Computer Systems Inc., USA (Figura 2.4): i contorni esterni dell'osso sono stati estratti a partire da slices CT con un metodo semiautomatico basato su sogliature dei livelli di grigio delle varie slice al fine di individuare i contorni di interesse.
Figura 2.4: Schermata del software di segmentazione Amira
Con lo stesso programma i contorni sono stati poi interpolati al fine di ottenere la superficie esterna del femore utilizzando un algoritmo di triangolazione Delaunay che ha permesso la generazione di superfici a faccette triangolari. Queste sono state archiviate in formato STL (Figura 2.5).
Figura 2.5: Immagine di femore in formato STL
Creazione della superficie di tipo NURBS
Sono seguite elaborazioni successive al fine di ottenere un solido topologicamente corretto, mediante l’utilizzo di software di Reverse Engineering, ottenendo una buona accuratezza.
Il modello di superficie “tassellato” risultante dalla segmentazione è stato convertito in un modello NURBS (Non Uniform Rational B-Spline) mediante l’utilizzo del software Geomagic Studio (v. 7, Raindrop Geomagic, Inc., USA) perché un modello di questo tipo, matematicamente definito, permette di avere una superficie adatta alla creazione di una mesh superficiale di elevata qualità dalla quale poi far crescere quella 3D internamente al modello.
Questo software ha permesso di suddividere successivamente l’intera geometria superficiale in pezze poligonali a forma di quadrilatero (patches), determinanti per il risultato finale della modellazione. Le patches sono delimitate da segmenti di curva (polilinee) che, al fine di definire correttamente la geometria del segmento osseo, devono passare dalle regioni di maggior interesse in
modo tale da aumentare l’accuratezza delle successive fasi di modellazione. Per questo motivo devono essere caratterizzate in maniera soddisfacente le geometrie complesse delle porzioni prossimali del femore, specialmente le regioni della testa e del collo, e le zone ad elevata curvatura come le strutture del piccolo e del grande trocantere. Questi segmenti di curva devono allo stesso tempo essere però semplici e regolari dal momento che il programma di generazione della mesh appoggerà su queste curve i nodi di partenza della suddivisione superficiale.
Figura 2.6: Immagini in sequenza della creazione delle patches nel modello di femore
2.4
Generazione della mesh
Per quanto riguarda la seconda fase è stata utilizzata una meshatura automatica agli elementi finiti dei modelli, messa a punto nel Laboratorio di Biomeccanica Computazionale presso gli Istituti Ortopedici Rizzoli.
È stato utilizzato il pacchetto software Hypermesh (v. 10, Altair Engineering, Inc., USA) che, per ottenere un’automatizzazione del processo, sfrutta la tecnica dell’ “advancing front”: partendo da una tassellizzazione triangolare della superficie esterna, mediante un processo iterativo, permette di costruire una mesh tetraedrica del volume andando dall’esterno verso l’interno.
È stata quindi generata automaticamente una mesh tetraedrica a 10 nodi del femore che, essendo del secondo ordine, definisce un campo di spostamento quadratico con le funzioni di tensione e deformazione che risultano così lineari.
Per ottenere una definizione più accurata degli strati più superficiali si è deciso di mantenere le dimensioni degli elementi dei primi quattro strati costanti, per poi aumentare con un rapporto di 1.2 negli strati più interni. Inoltre è stato deciso di avere una discretizzazione più fine nella parte prossimale del femore fino al piccolo trocantere con elementi di 1 mm di lato, per poi aumentare progressivamente fino alle regioni della diafisi dei campioni che hanno avuto una discretizzazione più grossolana con elementi di lato pari a 4 mm.
Si è avuto cura di generare uno strato regolare di tetraedri sulla superficie femorale in modo da evitare per quanto possibile gli inevitabili effetti di volume parziale. Questi sono generati da una maggiore dimensione degli elementi tetraedrici che vanno a costituire la superficie del modello, rispetto alle dimensioni proprie delle strutture corticali, soprattutto nelle aree di maggior interesse quali testa e collo del femore. In questo modo si ha una non del tutto fedele assegnazione delle proprietà meccaniche agli elementi di superficie dovute ad una media (come verrà spiegato nel paragrafo successivo) del campo scalare CT su ogni elemento, determinando una diminuzione della densità del modello nella regione superficiale del collo (Fulvia Taddei et al., 2006).
Figura 2.7: Immagini di un modello agli elementi finiti del femore nella sua configurazione di prova sperimentale (sulla sinistra) e sezione di una porzione prossimale del femore (sulla destra)
2.5
Definizione delle proprietà dei materiali
L’assegnazione delle proprietà dei materiali del tessuto osseo è uno step fondamentale nella generazione di modelli agli elementi finiti subject-specific a partire da dati provenienti da tomografia computazionale (CT).
I risultati del lavoro Taddei et al 2004 hanno mostrato che la scelta di un algoritmo di mappatura influenza la distribuzione dei materiali all’interno dell’osso e quindi la predizione del comportamento meccanico dello stesso.
È noto che le immagini CT possono fornire informazioni quantitative piuttosto accurate sulla geometria dell'osso a partire dal coefficiente di attenuazione del tessuto osseo, che risulta essere maggiore dei tessuti molli circostanti, determinando quindi bordi ben delimitati.
Tra i vantaggi di usare la scansione CT nella modellazione dell’osso vi è inoltre che la densità radiografica può essere correlata alle proprietà meccaniche dei tessuti ossei.
Una volta che la mesh agli elementi finiti è stata generata, si possono quindi definire le proprietà dei materiali relative ad ogni elemento mediando il campo scalare CT su ogni elemento mediante l’utilizzo di vari algoritmi.
Fino a poco tempo fa la maggior parte degli studi descriveva l'osso come un materiale con due fasi omogenee, derivando le proprietà meccaniche dell'osso corticale e trabecolare dalla letteratura. È stato dimostrato però che i modelli omogenei basati su due materiali sono meno accurati di quelli non omogenei (Fulvia Taddei et al., 2006).
Se si considera un modello subject-specific, le proprietà meccaniche devono quindi derivare dai relativi dati CT.
Nella tomografia computazione a raggi X la funzione di imaging rappresenta la distribuzione del coefficiente di attenuazione lineare del tessuto. I dati CT sono di solito espressi in Hounsfield Units (HU) che attualmente sono riconosciuti come uno standard, questi possono essere visti come campi
scalari tridimensionali campionati su una griglia regolare, correlati con la densità del tessuto.
È stato dimostrato infatti che i numeri CT sono quasi linearmente correlati con la densità apparente dei tessuti biologici su un ampio range di valori di densità.
Il processo di traduzione dei numeri CT nelle densità dei tessuti biologici e solitamente chiamata calibrazione del dataset CT. Se adeguatamente calibrate le immagini CT sono in grado di fornire informazioni accurate relativamente alla morfologia e alla densità del tessuto.
Inoltre sono state stabilite buone relazioni empiriche tra densità e proprietà meccaniche dei tessuti ossei, così è possibile derivare la distribuzione non omogenea delle proprietà del tessuto a partire da dati CT e riproporla in modelli agli elementi finiti subject-specific.
Se viene generata una mesh non strutturata a partire dagli stessi dati, la mesh e la distribuzione della densità sono perfettamente registrati nello spazio. Il problema che viene trattato in questo paragrafo riguarda come rappresentare questa distribuzione non omogenea di proprietà dei materiali nel modello agli elementi finiti.
Calibrazione del data-set CT
I sistemi CT hanno la capacità di misurare l’attenuazione lineare dei tessuti sotto esame. In generale l’attenuazione lineare di un materiale non è direttamente correlabile alla sua densità. Tuttavia nel caso del tessuto osseo la relazione tra HU (Hounsfield Units) e densità del tessuto è, in prima approssimazione, lineare.
I valori risultanti di una CT dipendono da molti fattori legati allo specifico esame e allo specifico macchinario, tra cui i parametri fisici di tensione di picco (KVp) e corrente di tubo (mA) impostati dal radiologo. Questo è risultato per molti anni un problema dal momento che misurazioni fatte per gli stessi individui anche usando la medesime procedure e tecnologie ma utilizzando differenti scanner, non sono state a lungo comparabili a causa di problemi di calibrazione.
Sono stati sviluppati allora diversi phantom (W. A. Kalender, 1992) con il fine di testare riproducibilità e accuratezza delle macchine CT in installazioni cliniche.
Questi phantom sono nati per avere la possibilità di effettuare controlli di qualità quotidiani e per incrociare le calibrazioni tra i vari sistemi di scansione in centri diversi nell’ottica di poter confrontare risultati di studi connessi ma dislocati in aree diverse.
W. a Kalender et al., 1995 hanno progettato e testato, al fine di permettere calibrazioni densitometriche tra diversi apparati, un phantom semi-antropomorfico geometricamente definito: l’European Spine Phantom (ESP).
Esso contiene un inserto spinale consistente in tre sezioni (o tre vertebre) di crescenti densità minerale ossea, rappresentanti del basso, medio e alto contenuto minerale.
Il phantom è costituito da composti acqua- e osso-equivalenti, grazie a plastiche a base di polietilene e resine epossidiche.
I materiali acqua-equivalenti sono plastiche che esibiscono le stesse caratteristiche di attenuazione dell’acqua rispetto ai raggi X, mentre i tessuti osso-equivalenti sono realizzati aggiungendo calcio idrossiapatite (HA) al composto acqua-equivalente.
I valori di riferimento per densità spugnose sono state riportati in un grande numero di report di studi su QCT: è stato individuato un range tra i 50-200 mg/cm3 realizzato variando le concentrazioni di HA.
certificati (diversi per ogni ESP) del fantoccio sulle ascisse (QCT), mentre sulle ordinate sono stati posti i relativi valori dai livelli di grigio (HU) ricavati dalla scansione con determinati parametri relativi all’esame specifico. Questa equazione, definita equazione di calibrazione, è necessaria per trasformare correttamente i valori misurati in valori significativi di densità del tessuto osseo:
QCT = + * HU
Dove QCT è la densità radiografica della CT espressa in g/cm3, HU è il valore HU dei voxel considerati, e sono i coefficienti di calibrazione stimati con la calibrazione.
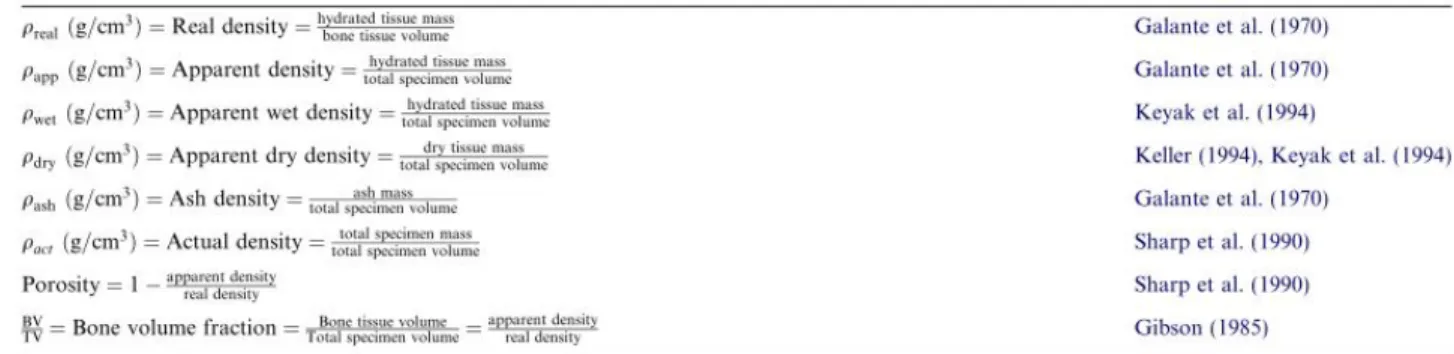
Il valore ricavato QCT non è il medesimo di ash (densità della parte minerale dell’osso) sia perché i campioni sottoposti a CT sono omogenei, sia perché la calibrazione è possibile solo in un range ristretto e spostato verso bassi valori di densità. Tra le due grandezze è stata però riscontrata una relazione lineare (Schileo, Dall’ara, et al., 2008):
ρQCT = a + b * ρash
dalla quale è possibile ricavare i fattori di correzione della calibrazione, il coefficiente angolare a/b e l’intercetta 1/b della relazione che segue:
ρash = a/b + ρQCT/b
L’altro parametro densitometrico ricavabile come ρash da misure sperimentali direttamente sull’osso, è ρapp, da intendere come la massa di quanto contenuto in un volume ben definito (senza fare distinzione tra le varie fasi del tessuto osseo). E’ stato riscontrato come il rapporto tra i due valori di densità, ρash / ρapp, rimanga addirittura costante e pari a 0.6 per l’intero range di densità (Schileo et al., 2008): questo risultato consente di implementare molte delle relazioni matematiche densità-modulo elastico che si basano sulla ρ ash ma più spesso sulla ρapp.
La relazione densità – proprietà meccaniche
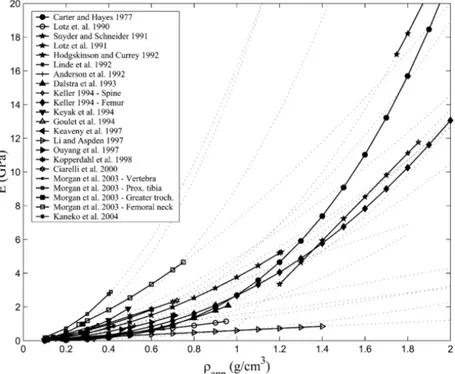
Diversi modelli empirici delle relazioni tra moduli di Young (E) e densità apparente dell’osso (app) possono essere trovati in letteratura (Figura 2.8).
Figura 2.8: Grafico che mostra il modulo elastico E in funzione della densità apparente app per tutti i lavori analizzati in (Helgason et al., 2008)
Nel lavoro (Helgason et al., 2008) è stata effettuata un’analisi approfondita delle relazioni pubblicate per il tessuto osseo umano dalla quale emerge che la relazione densità – modulo di Young adottata influenza in maniera evidente i risultati dei modelli.
Lo studio ha mostrato come il raggruppamento per parametri affini, come il sito anatomico di provenienza, la geometria del campione o il set-up sperimentale, non riescano a ridurre in maniera significativa questa variabilità che sembra essere dovuta principalmente a differenze nei protocolli delle prove meccaniche molto difficili da mettere a punto, in particolare per l’osso trabecolare. Sono generalmente riportate relazioni lineari o a potenza nella seguente forma:
E = a + b * appc
dove E è il modulo di Young assegnato uniformemente al voxel (in Gpa), app è la densità apparente in (g/cm3) e a, b, c i coefficienti adottati dall’utente.
Nel laboratorio di Tecnologia Medica presso gli Istituti Ortopedici Rizzoli è stata effettuato uno studio al fine di individuare una più efficiente relazione tra densità e proprietà meccaniche che possa aumentare l’accuratezza dei modelli (Schileo et al., 2007).
L’obiettivo di questo studio è stato quello di valutare se una scelta corretta della relazione densità – elasticità potesse portare ad accurate predizioni di strain nell’ambito di una strategia di generazione automatica di modelli FE subject-specific. A tale scopo è stato condotto uno studio di validazione, analogo a quello presentato nel presente lavoro di tesi, combinato numerico – sperimentale comparando gli strain predetti con quelli misurati da estensimetri posti sulla superficie di un set di
femori di cadavere sotto studio.
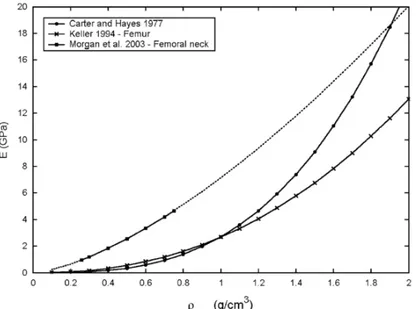
Tre differenti leggi a potenza densità – elasticità sono state selezionate dalla letteratura e implementate nei modelli agli elementi finiti (Figura 2.9).
Figura 2.9: Grafico che mostra l’andamento del modulo di Young in funzione della densità apparente per tre relazioni densità – elasticità selezionate. Viene mostrato una range di densità tipico delle ossa umane.
Gli strain principali predetti hanno mostrato essere correlati differentemente con i valori sperimentali per le tre relazioni tra elasticità e densità. La correlazione migliore, con risultati più vicini a quelli ideali in termini di pendenza e intercetta, è stata trovata per i modelli che hanno implementato l’equazione costitutiva di (Morgan, 2003) per il collo femorale umano:
E = 6.950 app1.49
I risultati presentati hanno anche mostrato che l’adozione di una singola relazione densità – elasticità sull’intero range di densità dell’osso è adeguata per ottenere un’elevata accuratezza. Questi risultati hanno confermano la grande influenza della relazione densità – modulo elastico usata sull’accuratezza delle predizioni numeriche.
Evoluzione del software di mappatura
.
E’ stato sviluppata presso il laboratorio di Tecnologia Medica degli Istituti Ortopedici Rizzoli una routine, chiamata BoneMat, il cui obiettivo è di correlare le mesh dei modelli 3D con le informazioni radiografiche disponibili nel dataset CT: ad ogni elemento è assegnato un modulo elastico a partire dalla densità apparente dell’osso.
Questo software ha subito nel corso del tempo un evoluzione, ma la struttura base del codice può essere suddivisa in 4 step principali (Zannoni, Mantovani, & Viceconti, 1998):
-si carica la geometria del modello e il dataset CT,
-si inseriscono i valori di calibrazione ed i parametri empirici, -si determinano i moduli dei vari elementi,
-si ottiene il modello calibrato.
BoneMat_V1
Un primo algoritmo che è stato implementato e utilizzato con il nome di BoneMat_V1, prevedeva di determinare tutti i punti CT campionati che cadevano all'interno del volume dell'elemento e assegnare all'elemento la media di questi valori.
La struttura complessiva del software può essere riassunta in tre fasi:
-Valutazione di un numero uniforme di HU: per ogni elemento della mesh il software calcola un valore uniforme di HU sulla base dei dati CT, nel seguente modo:
dove HUn è il valore uniforme del numero CT assegnato all'elemento n, e r sono i vertici del
reticolo CT che cade all'interno dell'elemento. Se l'elemento è più piccolo del voxel e nessun vertice del reticolo CT cade al suo interno, l'algoritmo calcola la media considerando gli otto vertici che circondano il centroide dell'elemento.
-Calibrazione del dataset CT: i numeri CT sono legati a vari fattori correlati con uno specifico esame come ad esempio i parametri fisici settati dal radiologo come la tensione di picco o la corrente di tubo.
Una calibrazione, di solito eseguita con l'utilizzo di un fantoccio, è necessaria per trasformare correttamente questi valori in valori di densità del tessuto osseo significativi.
Viene assunto che la relazione di calibrazione sia lineare: n = + * HUn, dove n è la densità
uniforme assegnata all'elemento n della mesh, HUn è l'uniforme numero CT, e e sono
coefficienti di calibrazione.
-Definizione di un modulo di Young uniforme: E’ stato assunto che un'unica equazione sia valida sull'intero range di densità: En = a + b * nc, dove En è il modulo di Young uniforme assegnato
all'elemento n della mesh, n è la sua densità, e a, b, c sono i coefficienti.
Questa equazione può essere lineare o esprimere E come una legge a potenza di n.
L'utente ha la possibilità di ridurre il numero dei materiali scegliendo una soglia variabile E per raggruppare i vari materiali all'interno di un numero limitato di moduli rappresentativi.
Il risultato si è rivelato essere abbastanza accurato se la dimensione dell'elemento era significativamente grande rispetto alla griglia di campionamento CT.
Questa tecnica però potrebbe non dare risultati soddisfacenti se al contrario gli elementi fossero di dimensioni comparabili o più piccole rispetto alle dimensioni del voxel.
BoneMat_V2
In questa versione successiva del software è stato messo a punto un algoritmo di media migliore basato su una integrazione numerica del campo HU sul volume dell’elemento (Taddei et al 2004).
Dove Vn indica il volume dell'elemento n, (x,y,z) sono le coordinate nel sistema di riferimento CT,
(r,s,t) sono le coordinate nel sistema di riferimento dell'elemento e J è lo Jacobiano della trasformazione tra i due sistemi di coordinate.
Il valore di HU(x,y,z) in un punto generico del dominio CT è determinato tramite una interpolazione trilineare tra gli otto valori dei punti della griglia adiacenti.
Questo nuovo metodo ha introdotto un più alto sforzo computazionale ma una stima più accurata del valore uniforme HU per ogni elemento.
In questo caso inoltre la dimensione dell'elemento finito non aveva influenza sull'accuratezza della stima di HU dal momento che in ogni singolo voxel la descrizione del campo HU non era uniforme e prendeva in considerazione la distribuzione spaziale del valore HU negli otto vertici circostanti del reticolo CT.
Questo nuovo algoritmo ha introdotto un maggior numero di materiali, probabilmente dovuto ad una più accurata descrizione del campo HU e quindi una più uniforme distribuzione dei valori HU tra gli elementi.
BoneMat_V3
Questa terza versione del software, che è stata anche quella utilizzata in questo lavoro di tesi, ha previsto una iniziale conversione di ogni valore HU dei voxel nei valori relativi dei moduli di Young creandone un campo continuo, e quindi la media, tramite una integrazione numerica, di questo nuovo campo scalare sul volume di ogni elemento.
Nel lavoro (Fulvia Taddei, Schileo, Helgason, Cristofolini, & Viceconti, 2007) è stato posto il quesito su quale delle due strategie differenti, V2 e V3, sia più accurata per mappare le proprietà meccaniche sulla mesh.
Sono stati confrontati modelli costruiti utilizzando il BoneMat_V2, che calcola un valore medio HU per ogni elemento della mesh eseguendo una integrazione numerica del campo HU sul volume degli elementi derivando poi il relativo modulo elastico, con modelli generati utilizzando il BoneMat V3, il quale trasforma il campo HU in un campo continuo di moduli di Young, e in un secondo momento esegue una integrazione numerica sul volume degli elementi.
Questi due approcci porterebbero ad identici risultati se la relazione densità – elasticità fosse lineare, ma essendo in letteratura prevalenti le leggi a potenza al riguardo, le due strategie conducono a differenti distribuzioni delle proprietà dei materiali.
I risultati del lavoro hanno mostrato che i moduli elastici calcolati con il BoneMat_V3 sono generalmente più alti di quelli calcolati con il BoneMat_V2. Questa differenza si è rivelata più marcata negli elementi presenti sulla superficie esterna nella regione del collo, confermando l’ipotesi che la strategia di media risulta essere più critica laddove ci siano gradienti di densità maggiori.
Il modello V3 ha mostrato un miglior accordo con i risultati sperimentali portando alla conclusione che mediando direttamente il campo dei moduli di Young migliora l’accuratezza della previsione degli strain superficiali, ritenuta importante come parametro di riferimento per l’insorgenza della
frattura, che generalmente si avvia sulla superficie dell’osso dove sono registrati i maggiori strain e stress.
Figura 2.10: Rappresentazione di un modello agli elementi finiti dopo l’esecuzione della procedura di assegnamento dei materiali con la routine BoneMat_V3
Ci sono delle considerazioni da fare relativamente alle scelte di modellazione eseguite per quanto riguarda la determinazione delle proprietà dei materiali del tessuto osseo.
In questo lavoro si è seguita una catena di modellazione che ha portato alla costruzione di modelli isotropi aventi proprietà dei materiali non omogenee.
Nonostante sia ben accertato il comportamento anisotropo del tessuto osseo, in molti lavori pubblicati, cosi come nel presente lavoro, è stato considerato essere localmente isotropico e ad ogni elemento della mesh è stato assegnato un modulo di Young medio.
Infatti nei vari studi in letteratura la differenza tra i metodi di assegnamento delle proprietà dei materiali è limitata alla differenza nel calcolo del modulo di Young medio per i vari elementi, ogni possibile variabilità del modulo di Young all’interno del volume FE è trascurata.
L’inserimento dell’informazione sull’anisotropia dell’osso nel modello è una possibilità ancora da esplorare ma che potenzialmente potrebbe aumentare la sua accuratezza, come discusso nel lavoro (Schileo, Taddei, Cristofolini, & Viceconti, 2008).
Non è ancora ben chiaro però come l’anisotropia dell’osso al livello di tessuto (in termini di gradi di anisotropia e assi principali) possa essere derivata da dataset CT clinici, le cui risoluzioni risultano essere non sufficientemente elevate, nell’ordine del mm.