5– Sistema di controllo e ideazione della sperimentazione
5
– Sistema di controllo e ideazione della
sperimentazione
5.1
Presentazione del capitolo
Nel quinto capitolo viene affrontato il problema dell’architettura di controllo del robot. Nel paragrafo iniziale si introduce in maniera dettagliata il controllo utilizzato sia per comandare il singolo attuatore sia il sistema generale utilizzato per la movimentazione di tutto il robot compreso il sistema di collegamento da adottare tra i vari moduli. Gli attuatori utilizzati vengono comandati attraverso la misurazione della corrente che permette di risalire alla corsa effettuata dalla quale è poi possibile valutare la forza di trazione prodotta.
Si elencano inoltre i tipi di sensori da predisporre a bordo della lampreda robotica per consentire l’orientamento durante le future sperimentazioni.
L’ultimo paragrafo introduce il tipo di ambiente artificiale da ricreare per effettuare le sperimentazioni evidenziando le caratteristiche che deve possedere per rendere le prove bioispirate al naturale habitat della lampreda marina.
5– Sistema di controllo e ideazione della sperimentazione
5.2
Sistema di controllo
Una affidabile architettura di controllo del robot è indispensabile per ottenere il corretto funzionamento del modello ricreato.
Test preliminari effettuati sugli attuatori elettromagnetici utilizzati per movimentare la lampreda artificiale hanno evidenziato che predisporre un controllo in forza su questi tipo di attuatori sfruttando la variazione della riluttanza presenta notevoli difficoltà a causa del manifestarsi di una rilevante diminuzione di forza di trazione dovuta principalmente all’inserimento dei necessari dispositivi di controllo tra attuatori e alimentatore con la conseguente perdita di potenza. La soluzione alternativa individuata è quella di operare un controllo in posizione potendo poi risalire alla forza sviluppata per mezzo della curva caratteristica forza-posizione nota in partenza dai data-sheets degli attuatori e dalle sperimentazioni effettuate.
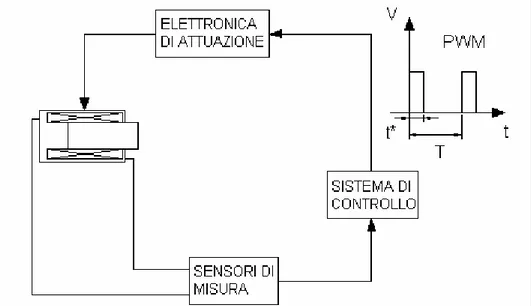
Il sistema di controllo del robot prevede un’impostazione del tipo presentata in figura 5.1. Per ogni attuatore (schematizzato sulla sinistra) si pianifica un controllo di questo tipo. Naturalmente tale sistema si inserirà poi entro un’ elettronica di controllo più generale ed in grado di comandare l’intero moto del robot.
5– Sistema di controllo e ideazione della sperimentazione In tale figura si mostra come attraverso l’acquisizione di dati per mezzo di sensori si riesce a risalire alla posizione del pistoncino dell’attuatore grazie alla curva caratteristica corrente-posizionepermettendo di impostare la strategia del moto di ogni modulo attraverso un controllo di tipo PWM (Pulse With Modulation) : variando il tempo t* del grafico (sulla destra della figura) si modifica il tempo di attivazione dell’attuatore ottenendo il controllo dei movimenti.
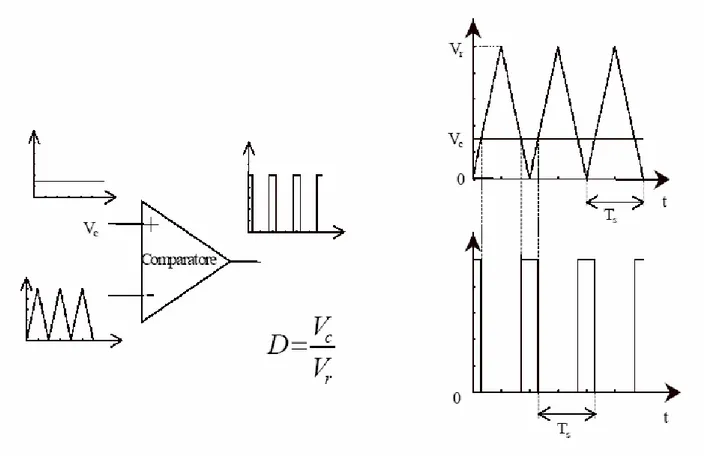
Si spiega ora in dettaglio il principio di funzionamento di un controllo basato sulla tecnica PWM per chiarire come opera tale sistema. A riferimento si prendano gli schemi presentati in figura 5.2.
Il controllore PWM varia il duty cycle dell’onda quadra, che pilota il transistore, in base al valore della tensione di controllo Vc in uscita dal regolatore.
Se Vc=0 il duty cycle D=0, se Vc=Vcmax allora D=1. Un sistema capace di eseguire una
tale trasformazione può essere un sistema basato appunto sulla tecnica detta a PWM (Pulse Width Modulation) illustrato in figura 5.2, che impiega un comparatore che esegue un confronto fra un’onda, detta portante, di periodo Ts pari a quello di
commutazione del tasto dei convertitori (generalmente un dente di sega o un’onda triangolare), con la tensione di riferimento, detta modulante.
L’uscita del comparatore commuta a livello alto quando l’ampiezza dell’onda triangolare è minore della tensione di riferimento.
Variando Vc fra zero e Vs il duty-ratio dell’onda quadra varia fra zero ed uno
linearmente con Vc ed si ha S C V V D= .
L’utilizzo di un controllo di tipo PWM permette di ottenere un minor consumo di potenza ed un controllo più fine perché basato sul tempo e non sulla modulazione del voltaggio. Nella lampreda robotica il segnale della corrente misurata presente un disturbo dovuto al rumore, per questo si filtra preliminarmente l’onda acquisita per ottenere poi attraverso un comparatore un’oda quadra in base ad un valore di soglia prefissato. Se la distanza tra due creste aumenta vuol dire che è incrementata la corsa effettuata dal nucleo mobile. Per mezzo del tempo calcolato tra due picchi si risale alla distanza ed infine alla forza. Un aumento della potenza degli attuatori è ottenibile semplicemente aumentando l’onda del ciclo di lavoro.
5– Sistema di controllo e ideazione della sperimentazione
Figura 5.2 : principio di funzionamento del controllo PWM
Si analizza ora il modello ideato per effettuare il controllo dell’intero robot. La testa cava viene utilizzata come contenitore del sistema principale di controllo oltre ai diversi tipi di sensori da inserire per l’orientamento del robot durante la fase di sperimentazioni.
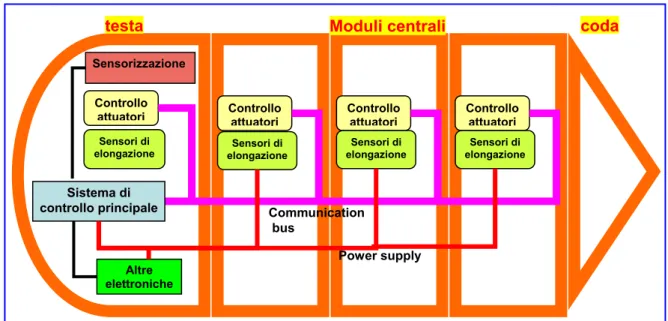
La progettazione dell’elettronica di controllo per comandare la lampreda robotica è basata sulla seguente schematizzazione di figura 5.3.
Si noti come la parte denominata testa in realtà comprenda la testa cava unita al modulo contenente il primo blocco di attuatori utilizzato per la movimentazione del segmento immediatamente successivo e l’ultima parte costituita dalla coda sia movimentata dal modulo antecedente.
5– Sistema di controllo e ideazione della sperimentazione
Figura 5.3 : schema di controllo del robot
Il sistema di controllo principale ha il compito di eseguire le seguenti funzioni:
• acquisire dati dal sistema di sensori ed in funzione degli input ricevuti decidere le strategie di moto per ogni singolo modulo, cioè come e quando attivare gli attuatori elettromagnetici
• Inviare l’impulso di attivazione dei comandi ad ogni modulo attraverso la porta di comunicazione dati (comunication bus)
• Definire nuovi comandi di moto basandosi sul ritorno di informazioni ricevute da ogni modulo
• Ricevere e operare comandi di moto inviati da un operatore esterno (attraverso ad esempio comunicazione wireless)
Per conseguire questi risultati è necessario utilizzare un chip con alta velocità di esecuzione ed una capacità di interfaccia flessibile. La migliore soluzione può essere
testa Moduli centrali coda
Sensorizzazione Controllo attuatori Sensori di elongazione Altre elettroniche Controllo attuatori Sensori di elongazione Controllo attuatori Sensori di elongazione Controllo attuatori Sensori di elongazione Communication bus Sistema di controllo principale Power supply
5– Sistema di controllo e ideazione della sperimentazione rappresentata dall’utilizzo di un controllore basato sulla tecnologia DSP (Digital Signal Processor), si tratta quindi di un "processore digitale di segnale". In pratica consiste in un dispositivo programmabile in tutto analogo al processore centrale di un Personal Computer (la CPU), specializzato per effettuare operazioni di trattamento di segnali. Le principali caratteristiche che deve possedere sono la presenza di un alto numero di input (a causa della presenza di molteplici sensori) e la capacità di processare dati in tempo reale. In questo tipo di processore generalmente sono presenti diverse interfacce di comunicazione per effettuare lo scambio di dati tra le porte di comunicazione.
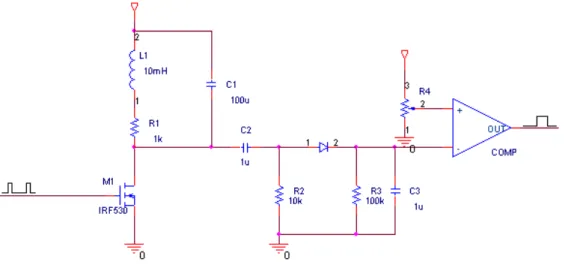
Per monitorare la posizione degli attuatori ad ogni ciclo PWM si utilizza il circuito mostrato in figura 5.4 dove si nota in uscita un semplice segnale binario che commuta quando viene superato un valore di soglia. Misurando li tempo occorso tra il picco del PWM e questo valore di soglia è possibile stimare la distanza percorsa.
Figura 5.4 : schema del monitoraggio degli attuatori
Un primo controllo sulla posizione degli attuatori può essere effettuato in ogni modulo grazie all’utilizzo di un controllore di basso livello (ad esempio un Microchip PIC). Durante un fissato numero di cicli questo controllore prova a regolare da solo la posizione dell’attuatore evitando di inviare troppe informazioni al controllore principale al fine di permettere l’ottenimento di un controllo in real time. È stato implementato
5– Sistema di controllo e ideazione della sperimentazione anche l’algoritmo di controllo del singolo modulo e quello necessario per comunicare con il controllore principale.
Il sistema di sensori prevede l’utilizzo dei seguenti apparati:
• un sistema vestibolare in grado di provvedere all’orientazione spaziale in uno spazio tridimensionale.
• un sistema di visione in grado di fornire un ritorno visivo all’operatore per guidare il robot dentro percorsi complessi
• sensori di urto per impedire collisioni del robot
• sensori chimici per controllare le concentrazioni delle sostanze disciolte nell’acqua durante la locomozione
Naturalmente oltre ai menzionati sistemi ne possono essere aggiunti altri a seconda delle specifiche esigenze. Inoltre il robot può essere predisposto di collegamenti wireless per aumentare lo spazio d’azione.
Per quanto riguarda il dispositivo di alimentazione necessario per attuare il robot è stato assemblato un alimentatore sviluppante una potenza di circa 1500 W. Ogni attuatore può infatti lavorare entro una potenza di 60 W grazie al fattore di servizio scelto. Va comunque evidenziato che non accadrà mai il caso di alimentazione contemporanea di tutti gli atttautori in funzione proprio del tipo di movimentazione scelta che prevede l’attuazione a comando di una coppia di attuatori per ricreare la muscolatura agonista/antagonista della lampreda.
5.3
Torrente artificiale
Per la sperimentazione del moto del robot, si è deciso di ricreare un tipico ambiente naturale nel quale la lampreda abitualmente vive. Prove di movimentazioni di robot
5– Sistema di controllo e ideazione della sperimentazione biomimetici subacquei in vasche con acqua ferma sono già state ampiamente effettuate e discusse, anche se con un diverso sistema di attuazione rispetto a quello da noi progettato.
Si è deciso di compiere un successivo passo in avanti allo scopo di rendere la sperimentazione sul robot costruito utile anche dal punto di vista della riproduzione del comportamento naturale della lampreda. A seguito dell’inserimento futuro di sensoristica a bordo del robot, si è pensato di sperimentarne l’orientamento in un ambiente caratterizzato da ostacoli peculiari dell’habitat di questo essere, magari facendogli duplicare atteggiamenti tenuti abitualmente. Sono infatti diverse le caratteristiche comportamentali proprie della lampreda.
Si vuole quindi ottenere un percorso con acqua corrente e con la possibilità di inserire a piacimento barriere da poter aggirare.
Per ottenere questo, sorge la necessità di progettare una vasca con un fondale modificabile in modo rapido e semplice. Si è ideata una struttura costituita da due vasche, una a monte e una a valle del torrente vero e proprio: attraverso una pompa si crea una corrente che percorre interamente il percorso, dove sono state inserite delle variazioni di profondità per mutare la velocità dell’acqua con la quale il robot viene investito. Il fondale è stato sagomato su un materiale modellabile, come sacchi di sabbia o simili. Così facendo si può a piacimento modificarne la struttura in funzione del tipo di sperimentazione da effettuare.
Si giungerà quindi alla realizzazione di un torrente artificiale entro cui far operare la lampreda, effettuando movimenti nello spazio a disposizione in funzione degli input provenienti dall’ambiente circostante, potendo compiere variazioni di posizione, velocità, inversione del moto, a seconda del comando eseguito in base alle informazioni provenienti dai sensori presenti a bordo del robot.
Al momento della stesura di questo elaborato è stato raccolto quasi tutto il materiale necessario alla realizzazione del percorso, deve però ancora essere prodotto in pratica quanto deciso in fase teorica.
Entro breve tempo saranno effettuate le prime sperimentazioni, in conseguenza anche del non ancora totale completamento del sistema di controllo da inserire sul robot,
5– Sistema di controllo e ideazione della sperimentazione necessario per comandare la movimentazione degli attuatori e impostare variazioni sul percorso intrapreso durante il moto.
Sperimentazioni su robot biomorfi in ambienti acquatici ricreati fedelmente non sono mai state affrontate, quella che si è ideata è la prima di questo genere e sono attesi interessanti risultati dai quali sarà possibile ricavare importanti informazioni inerenti alla riproduzione del moto in condizioni naturali.