Capitolo 5
SIMULAZIONI
5.1 Modelli utilizzati
In questo capitolo verranno descritte tutte le simulazioni effettuate sui vari modelli studiati. Si è scelto di costruire un modello in ambiente software Simulink® (Figura 5-1) ed uno utilizzando MSC.ADAMS® (Figura 5-2), in modo da avere un confronto immediato dei risultati ottenuti che permettesse di avere una prima stima sulla bontà dei modelli stessi. Certamente un eventuale confronto con dei dati ricavati da prove sperimentali effettuate sul motore può dare molte informazioni su come impostare i parametri che caratterizzano i modelli, per renderli meno approssimati e quindi più vicini alla realtà.
Per avere una più ampia visione del comportamento dinamico della trasmissione si sono effettuate tre prove relative ad altrettanti regimi di giri del motore. In particolare si sono studiati: il regime minimo (1270 giri/1’), quello di coppia massima (5750 giri/1’) ed uno intermedio (4500 giri/1’).
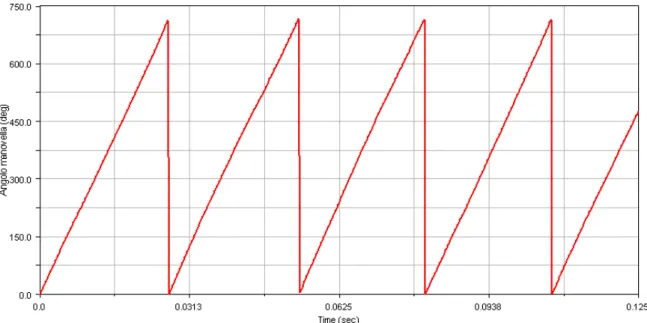
Per entrambi i modelli si è applicato il momento motore corrispondente al regime di giri considerato, al volano J2, ovvero quello cui corrisponde il manovellismo. La coppia motrice può essere considerata una funzione dell’angolo di manovella e, visto che stiamo trattando un motore a quattro tempi, si ha un ciclo motore ogni 720 gradi di questo. Si è misurato l’angolo di rotazione del volano in questione e tramite semplici calcoli trasformato in una funzione “a denti di sega” che una volta raggiunto il valore di 720 ripartisse da zero (Figura 5-3).
Figura 5-1 – Esempio di modello realizzato con il software Simulink®
Figura 5-3 – Andamento dell’angolo di manovella in funzione del tempo
In questo modo però il sistema non è più equilibrato, pertanto è necessario applicare all’ultimo volano della catena, cioè quello cui corrisponde l’inerzia della ruota posteriore, del veicolo e del pilota, un momento resistente medio, determinato per tentativi, capace di mantenere la velocità angolare media costante.
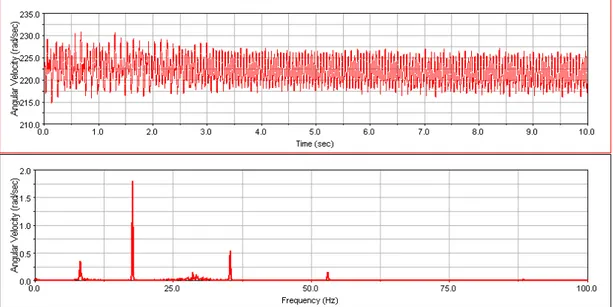
In Figura 5-4, Figura 5-5 e Figura 5-6 si evidenziano i diagrammi dei momenti motori in funzione del tempo, utilizzati nelle simulazioni, ed il loro rispettivo contenuto in frequenza. L’analisi di Fourier si è dimostrata molto importante per evidenziare eventuali vicinanze tra le frequenze eccitatrici e quelle proprie del sistema.
Si nota come il contenuto in frequenza rispecchi quanto affermato in [5], e cioè che, nel caso di motori a combustione interna a quattro tempi, la frequenza dell’i-esima armonica che compone il momento motore è
2
ω
⋅ =i fi
dove ω è la velocità di rotazione del motore.
Si tenga presente inoltre che l’armonica fondamentale è quella di frequenza
2
ω
= f
Figura 5-4 – Andamento del momento motore a 1270 giri/1’ in funzione del tempo e suo contenuto in frequenza
Per quanto riguarda il momento motore a 1270 giri 1' l’armonica fondamentale ha un valore di 10.58 Hz , come è facilmente visibile dalla Figura 5-4.
Figura 5-5 – Andamento del momento motore a 4500 giri/1’ in funzione del tempo e suo contenuto in frequenza
Osservando la Figura 5-5 si nota come la frequenza fondamentale che compone il momento motore a 4500 giri 1' sia di 37.50 Hz
Figura 5-6 – Andamento del momento motore a 5750 giri/1’ in funzione del tempo e suo contenuto in frequenza
La coppia motrice al regime massimo di rotazione del motore, vale a dire 5750 giri 1'
presenta un’armonica fondamentale di 47.92 Hz .
5.2
Analisi dei risultati
Tutte le simulazioni sono state effettuate per un tempo di dieci secondi. A seconda del regime di giri considerato, ad ogni volano è stata impressa una velocità di rotazione iniziale pari a quella dell’albero motore. E’ stato deciso di analizzare l’andamento della velocità angolare istantanea dell’ultimo volano dei vari sistemi equivalenti studiati. Si è ritenuto quest’ultimo il più significativo per quanto riguarda l’analisi delle oscillazioni longitudinali del veicolo.
5.2.1 Sistema rigido
In questo paragrafo vengono esposti i risultati ottenuti con entrambi i software per quanto riguarda il sistema rigido, descritto precedentemente nel Paragrafo 4-2. Visto che sono presenti solamente elementi in acciaio si sono inseriti nel modello i valori dei coefficienti di smorzamento calcolati utilizzando dei rapporti di smorzamento
02 . 0 = i ξ riportati in Tabella 18.
5.2.1.1 Risultati delle analisi a 1270 giri/1'
Figura 5-7 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 1270 giri/1’, ottenuta con entrambi i software
In Figura 5-7 e Figura 5-8 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano appartenente al sistema equivalente (Figura 4-2), ottenuta con entrambi i software prima citati, e il loro contenuto in frequenza. Come si evince da questi diagrammi c’è un buon accordo fra i due modelli proposti, in particolar modo per quanto riguarda i contenuti in frequenza, dove i due andamenti sono praticamente sovrapposti. La velocità angolare oscilla intorno ad un valore di circa 133 rad s, molto prossimo alla velocità iniziale imposta.
Figura 5-8 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 1270 giri/1’, ottenuta con entrambi i
Si nota come nel segnale siano predominanti quattro frequenze: la prima frequenza propria del sistema (cfr. 4.2.2), pari a 26.80 Hz , e le prime tre frequenze che compongono il momento motore, le quali presentano un’entità di 10.58 Hz , 21.17 Hz e 31.75 Hz .
5.2.1.2 Risultati delle analisi a 4500 giri/1'
Anche in questo caso si vede un ottimo accordo fra i due modelli realizzati. La velocità angolare (Figura 5-9) presenta una media molto prossima ai 471 rad s
imposti come condizione iniziale, denotando un buon equilibrio del sistema durante tutto l’arco della simulazione
Figura 5-9 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 4500 giri/1’, ottenuta con entrambi i software
Figura 5-10 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 4500 giri/1’, ottenuta con entrambi i
I contenuti in frequenza dei due segnali (Figura 5-10) sono in pieno accordo; anche qui troviamo la prima frequenza propria del sistema e l’armonica fondamentale,del valore di 37.50 Hz , che compone il momento sviluppato dal motore a 4500giri 1'.
5.2.1.3 Risultati delle analisi a 5750 giri/1'
Come si può notare anche in questo caso i due modelli si trovano in ottimo accordo. I contenuti in frequenza sono quasi sovrapposti e denotano la presenza della prima frequenza propria del sistema e della frequenza fondamentale (47.92 Hz ) che presenta il momento motore a questo regime di rotazione.
Figura 5-11 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 5750 giri/1’, ottenuta con entrambi i software
Figura 5-12 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J7) al regime di 5750 giri/1’, ottenuta con entrambi i
Il sistema rigido non è certamente il più importante dal punto di vista dello studio dinamico del drive train, poiché presenta notevoli approssimazioni non considerando l’effetto delle due cinghie. E’ stato comunque molto utile, soprattutto come primo approccio ai due software impiegati.
5.2.2 Sistema con cinghie
Il sistema che andiamo ad analizzare è certamente molto importante per quanto riguarda il comportamento dinamico del drive train. Infatti, si tratta del modello che replica il sistema reale prima dell’inserimento del parastrappi, in quanto vengono considerati i contributi della cinghia del CVT e della cinghia sincrona di riduzione finale (Paragrafo 4-3). Dall’analisi di tale modello si possono trarre preziose informazioni su come dirigere lo studio di un parastrappi in grado di modificare il comportamento dinamico del drive train.
I coefficienti di smorzamento sono stati calcolati considerando il diverso contributo delle cinghie rispetto alle parti in acciaio, e sono riportati in Tabella 18 (Paragrafo 4.6).
E’ stata effettuata una prova sperimentale, dove si è rilevata la velocità istantanea della puleggia condotta del CVT. Si è evidenziato il buon accordo del modello con il sistema reale, sia dal punto di vista dell’ampiezza che da quello del contributo in frequenza dei segnali.
Figura 5-13 – Velocità angolare istantanea della puleggia condotta del CVT rilevata sperimentalmente al regime di 1270 giri/1’ e relativo contenuto in frequenza
Infatti, dalla Figura 5-13 si nota come il segnale sperimentale, anche se non è molto pulito, presenta un’ampiezza del tutto paragonabile a quella del modello (Figura 5-14). E’ da notare inoltre che i valori differiscono di un coefficiente moltiplicativo pari al rapporto d’ingranaggio imposto dal CVT (2.079), visto che J4, nel sistema ridotto, è
stato riportato all’asse motore.
Esaminando i contenuti in frequenza, si nota come anche il segnale sperimentale presenti il contributo di un’armonica molto prossima alla prima frequenza del sistema, pari a 8.23Hz(cfr. 4.3.4). Nel segnale relativo alla simulazione, oltre a questo, troviamo il contributo delle prime tre frequenze che compongono il momento motore a 1270 giri/1’ (10.58 Hz e 25.17 Hz e 31.75 Hz).
Figura 5-14 – Velocità angolare istantanea della puleggia condotta del CVT rilevata con MSC.ADAMS al regime di 1270 giri/1’ e relativo contenuto in frequenza
5.2.2.1 Risultati delle analisi a 1270 giri/1'
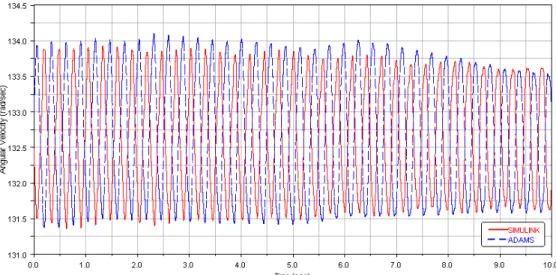
In Figura 5-15 e Figura 5-16 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-12), 9 ottenuta con entrambi i software prima citati, e il loro contenuto in frequenza.
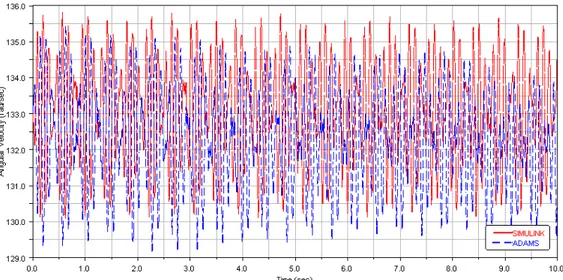
Figura 5-15 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i software
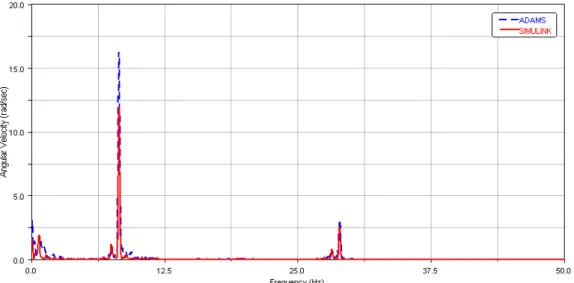
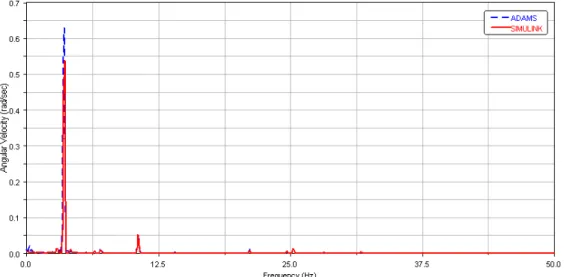
Dal grafico dei contenuti in frequenza si nota la prevalenza di due armoniche; la prima ha un valore molto prossimo alla prima frequenza propria del sistema (cfr. 4.3.4), vale a dire 8.23Hz, e presenta un’ampiezza di circa 0.85 rad/s. La seconda invece è pari alla frequenza fondamentale del momento motore a 1270 giri/1’ (10.58Hz), ed ha un’ampiezza dell’ordine di 0.65 rad/s.
E’ possibile che la vicinanza tra queste due armoniche possa provocare l’innesco di pericolosi fenomeni di risonanza, che vadano a sollecitare notevolmente il drive train, favorendo l’insorgere delle vibrazioni longitudinali del veicolo.
Figura 5-16 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i
5.2.2.2 Risultati delle analisi a 4500 giri/1'
Dall’analisi della Figura 5-17 si nota un’ampia oscillazione della velocità istantanea dell’ultimo volano del sistema equivalente, il cui segnale è composto fondamentalmente da due armoniche aventi frequenza molto prossima ai valori di
Hz 23 .
8 e 28.87Hz, che sono la prima e la seconda frequenza propria del sistema (cfr. 4.3.4). L’ampiezza di tali armoniche (Figura 5-18) è dell’ordine di 15 rad/s per la prima e di 2.5 rad/s per la seconda.
Figura 5-17 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i software
Figura 5-18 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i
5.2.2.3 Risultati delle analisi a 5750 giri/1'
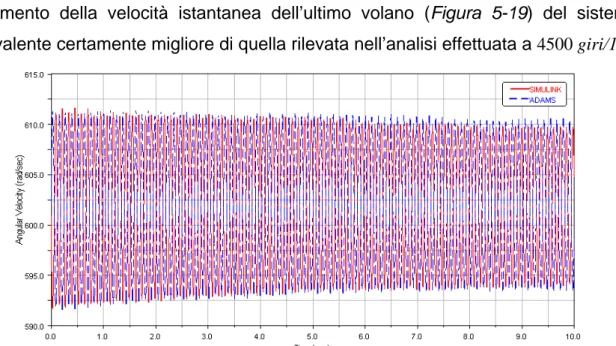
Svolgendo la simulazione al regime di coppia massima del motore si ottiene un andamento della velocità istantanea dell’ultimo volano (Figura 5-19) del sistema equivalente certamente migliore di quella rilevata nell’analisi effettuata a 4500 giri/1’.
Figura 5-19 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i software
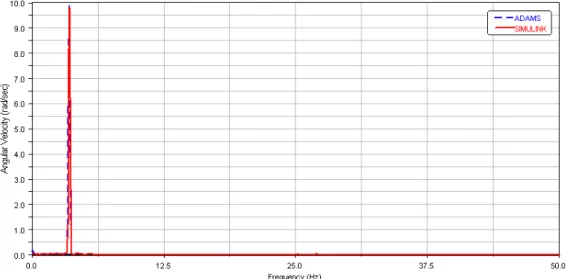
Figura 5-20 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i
software
Come si nota dal grafico dei contenuti in frequenza (Figura 5-20), il segnale è composto prevalentemente da un’armonica avente frequenza molto prossima alla prima frequenza propria del sistema, 8.23Hz (cfr. 4.3.4), avente un’ampiezza dell’ordine di 4.5 rad s.
5.2.3 Sistema con parastrappi in gomma a “rigidezza bassa”
In questo paragrafo vengono riassunti i risultati più significativi delle simulazioni effettuate sul modello che comprende il parastrappi in gomma (Figura 4-15), denominato a “rigidezza bassa”, avente una rigidezza torsionale
rad m N
Kp1 = 2679 ⋅ , che è stato descritto nel Paragrafo 4.4. Tale rigidezza è stata determinata con un processo iterativo in modo da abbassare la prima frequenza propria del sistema, al fine di allontanare quest’ultima dalla frequenza fondamentale che compone il momento motore al regime di giri minimo. La nuova prima frequenza propria assume un valore di 3.56 Hz (cfr. 4.4.2). I coefficienti di smorzamento sono stati calcolati considerando il diverso contributo delle cinghie e del parastrappi rispetto alle parti in acciaio (Paragrafo 4.6), e sono riportati in Tabella 18.
5.2.3.1 Risultati delle analisi a 1270 giri/1'
Figura 5-21 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i software
In Figura 5-21 e Figura 5-22 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9 ottenuta con entrambi i software, ed il loro contenuto in frequenza. Entrambi i grafici dimostrano un ottimo accordo tra i due modelli. Dall’analisi del grafico del contenuto in frequenza del segnale si evince la marcata partecipazione di un’armonica avente frequenza molto prossima alla prima frequenza propria del sistema (cfr. 4.4.2), di valore 3.56 Hz, di ampiezza dell’ordine di 0.6 rad/s, ed un contributo più basso fornito
da un’armonica con una frequenza molto prossima a quella fondamentale del momento motore a 1270 giri/1’. Confrontando questi grafici con quelli ottenuti per il sistema privo di ammortizzatore torsionale (Sistema con cinghie - Figura 5-15 e Figura 5-16), si nota come, dopo l’inserimento del parastrappi, la velocità angolare istantanea presenti una frequenza di oscillazione decisamente più bassa.
Si nota come si sia ridotta l’ampiezza dell’armonica di frequenza pari alla prima frequenza propria del sistema, che è passata da un valore di 0.85 rad/s ad uno di 0.6 rad/s. Inoltre, si è avuto un abbassamento dell’armonica di frequenza pari alla frequenza fondamentale del momento motore, che ora presenta un valore di 0.05 rad/s, molto inferiore rispetto allo 0.65 rad/s evidenziato in Figura 5-16.
Figura 5-22 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i
software
5.2.3.2 Risultati delle analisi a 4500 giri/1'
In Figura 5-23 e Figura 5-24 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9 ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 4500 giri/1’.
Figura 5-23 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i software
Figura 5-24 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i
software
Confrontando i risultati ottenuti dalla simulazione effettuata a questo regime di giri sul modello privo di parastrappi, si può subito affermare che si è avuta una notevole riduzione dell’ampiezza e della frequenza delle oscillazioni della velocità angolare di
9
J . In particolare (Figura 5-24), il segnale risulta composto essenzialmente da un’armonica di frequenza pari alla prima frequenza propria del sistema (3.56 Hz), avente ampiezza di circa 10 rad/s, mentre per il modello privo di parastrappi si riscontrava un’ampiezza dell’ordine di 15 rad/s (Figura 5-18). E’ da notare poi come si sia praticamente annullato il contributo dell’armonica avente frequenza pari alla frequenza fondamentale del momento motore.
Si può quindi pensare che il parastrappi apporti un buon contributo anche in questa particolare configurazione di lavoro.
5.2.3.3 Risultati delle analisi a 5750 giri/1'
La Figura 5-25 evidenzia, al contrario delle simulazioni effettuate a 1270 giri/1’ e a 4500 giri/1’, un incremento di ampiezza dell’oscillazione della velocità angolare di J . 9
Figura 5-25 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i software
Figura 5-26 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i
software
Come si evince dalla Figura 5-26, l’ampiezza presenta ora un valore prossimo a 10 rad/s. Anche in questo caso, l’armonica fondamentale del segnale ha una frequenza molto prossima alla prima frequenza propria del sistema (Figura 5-26).
5.2.4 Sistema con parastrappi in gomma a “rigidezza media”
In questo paragrafo vengono riassunti i risultati più significativi delle simulazioni effettuate sul modello che comprende il parastrappi in gomma (Figura 4-15), denominato a “rigidezza media”, avente una rigidezza torsionale
rad m N
Kp2 = 5867 ⋅ , che è stato descritto nel Paragrafo 4.4. Con questo nuovo valore di rigidezza la prima frequenza propria assume un valore di 4.81 Hz (cfr. 4.4.2). I coefficienti di smorzamento sono stati calcolati considerando il diverso contributo delle cinghie e del parastrappi rispetto alle parti in acciaio (Paragrafo 4.6), e sono riportati in Tabella 18.
5.2.4.1 Risultati delle analisi a 1270 giri/1'
Figura 5-27 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i software
In Figura 5-27 e Figura 5-28 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9 ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 1270 giri/1’. Si nota come la frequenza di oscillazione del segnale si sia abbassata rispetto al caso privo di parastrappi.
Dal grafico dei contenuti in frequenza si evince come l’ampiezza dell’armonica di frequenza pari alla prima frequenza propria del sistema (4.81 Hz) presenti un’ampiezza di circa 0.5 rad/s, in luogo degli 0.85 rad/s riscontrati nel sistema privo di parastrappi (Sistema con cinghie). Inoltre, l’armonica di frequenza pari alla frequenza
fondamentale del momento motore (10.58 Hz) è passata da 0.65 rad/s (Figura 5-16) all’attuale 0.1 rad/s.
Figura 5-28 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i
software
5.2.4.2 Risultati delle analisi a 4500 giri/1'
Figura 5-29 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i software
In Figura 5-29 e Figura 5-30 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9 ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 4500 giri/1’. Dal confronto con i risultati ottenuti, allo stesso regime di giri, per il sistema privo di parastrappi si evince come ora il segnale
presenti un’armonica di valore prossimo alla prima frequenza propria del sistema (4.81 Hz) e di ampiezza di circa 8 rad/s, in luogo dei 15 rad/s riscontrati precedentemente (Figura 5-18).
Inoltre si è annullato il contributo dell’armonica di frequenza pari alla seconda frequenza propria del sistema.
Figura 5-30 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i
software
5.2.4.3 Risultati delle analisi a 5750 giri/1'
Figura 5-31 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i software
In Figura 5-31 e Figura 5-32 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9
ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 5750 giri/1’.
Figura 5-32 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i
software
I risultati ottenuti mostrano la prevalenza dell’armonica avente frequenza pari alla prima frequenza propria del sistema (4.81 Hz) e di ampiezza dell’ordine di 8 rad/s in luogo dei 4.5 rad/s riscontrati nel sistema privo di parastrappi (Figura 5-20). E’ possibile affermare che per quanto riguarda questo regime di giri, non si è avuto un effetto positivo inserendo il parastrappi.
5.2.5 Sistema con parastrappi in gomma a “rigidezza alta”
Nei seguenti paragrafi sono stati raccolti i risultati più significativi delle simulazioni effettuate sul modello che comprende il parastrappi in gomma (Figura 4-15), denominato a “rigidezza alta”, avente una rigidezza torsionale Kp3 =10117N⋅m rad, che è stato descritto nel Paragrafo 4.4. Con tale rigidezza la nuova prima frequenza propria del sistema assume un valore di 5.68 Hz (cfr. 4.4.2). I coefficienti di smorzamento sono stati calcolati considerando il diverso effetto delle cinghie e del parastrappi rispetto alle parti in acciaio (Paragrafo 4.6), e sono riportati in Tabella 18.
5.2.5.1 Risultati delle analisi a 1270 giri/1'
Figura 5-33 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i software
In Figura 5-33 e Figura 5-34 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-15), 9 ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 1270 giri/1’.
Figura 5-34 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 1270 giri/1’, ottenuta con entrambi i
software
Il contenuto in frequenza mostra la presenza di armoniche di frequenza prossima alla prima ed alla seconda frequenza propria del sistema (5.68 Hz e 26.33 Hz), ed il contributo della frequenza fondamentale del momento motore (10.58 Hz). Tali
armoniche, presentano rispettivamente i seguenti valori di ampiezza: 1.4 rad/s, 0.6 rad/s e 0.3 rad/s.
Confrontando i risultati ottenuti dalle simulazioni effettuate a questo regime di giri sul modello privo di parastrappi (Sistema con cinghie - Figura 5-16 e Figura 5-17 ), si può subito affermare che si è avuto un incremento dell’ampiezza dell’armonica di frequenza pari alla prima frequenza propria, mentre si è abbassato il contributo della frequenza fondamentale del momento motore. L’incremento di ampiezza potrebbe essere determinato dalla vicinanza tra una frequenza eccitatrice e la prima frequenza propria del sistema.
5.2.5.2 Risultati delle analisi a 4500 giri/1'
In seguito si riportano i risultati delle simulazioni effettuate a 4500 giri/1’. Dall’esame della Figura 5-35 si può dedurre un buon effetto del parastrappi sulla dinamica del sistema. Infatti, si ha una riduzione delle oscillazioni di J rispetto al modello privo di 9 parastrappi, di un’entità paragonabile a quelle rilevate nel sistema provvisto di smorzatori di minor rigidezza.
Figura 5-35 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i software
Il contenuto in frequenza presenta sempre un picco in corrispondenza del valore della prima frequenza propria del sistema 5.68 Hz, di ampiezza di circa 10 rad/s, in luogo dei 15 rad/s riscontrati nel sistema privo di parastrappi.
Figura 5-36 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 4500 giri/1’, ottenuta con entrambi i
software
5.2.5.3 Risultati delle analisi a 5750 giri/1'
In seguito alle simulazioni effettuate ad un regime di 5750 giri/1’ si sono rilevati i grafici riportati in Figura 5-37 e in Figura 5-38, riguardanti le ormai consuete variabili. Dall’analisi dell’andamento della velocità angolare istantanea dell’ultimo volano si deduce che la sua ampiezza è pressoché invariata rispetto a quella rilevata nel sistema privo di parastrappi. Infatti si nota che il segnale presenta una frequenza nell’intorno del valore della prima frequenza propria del sistema studiato (5.68 Hz) di ampiezza di circa 5 rad/s.
Figura 5-37 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i software
Figura 5-38 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J9) al regime di 5750 giri/1’, ottenuta con entrambi i
software
Confrontando invece i risultati con quelli ottenuti con i parastrappi di minor rigidezza, si può dedurre un effetto positivo, visto si era ottenuta un’ampiezza di oscillazione più ampia.
Lo studio del drive train effettuato adottando un parastrappi in gomma posto tra la ruota posteriore del veicolo e la ruota condotta della cinghia dentata (Figura 2-1), ha evidenziato come sia possibile modificare la risposta dinamica del sistema.
Per quanto riguarda il regime di giri minimo (1270 giri/1’), che è quello su cui poniamo maggior attenzione vista la possibile nascita di oscillazioni longitudinali del veicolo, operando uno studio al variare della rigidezza dell’ammortizzatore torsionale si sono ottenuti i migliori risultati adottando un parastrappi avente una rigidezza torsionale
rad m N
Kp2 = 5867 ⋅ .
Si è ridotta sempre più la rigidezza torsionale dell’albero che connette la ruota posteriore con la puleggia dentata, simulando l’inserimento di un parastrappi di rigidezza sempre minore, in modo da allontanare la prima frequenza propria del sistema con la frequenza fondamentale del momento motore a 1270 giri/1’.
Arrivati alla rigidezza Kp2 = 5867N⋅m rad, si è riscontrato il miglior grado di abbattimento dell’ampiezza di oscillazione, dopo di che, quest’ultima, ha cominciato ad aumentare man mano che si diminuiva la rigidezza torsionale del parastrappi. Si può affermare che, diminuendo la rigidezza del parastrappi, e quindi allontanando la prima frequenza propria del sistema con la frequenza fondamentale del momento motore, è possibile ridurre l’ampiezza dell’oscillazione della velocità angolare della
ruota posteriore. Tuttavia, per valori di rigidezza diversi da Kp2, è possibile che il sistema presenti una prima frequenza propria molto vicina ad una frequenza eccitatrice e la velocità angolare assuma ampiezze più elevate.
Ottimi risultati sono stati raggiunti per il funzionamento del sistema al regime di 4500 giri/1’, dove per le tre rigidezze studiate si è avuto un buon abbattimento di frequenza e ampiezza dell’oscillazione della ruota posteriore. Il miglior risultato si è verificato anche questa volta per il parastrappi a “rigidezza media” (Kp2), dove
l’ampiezza di oscillazione si è quasi dimezzata rispetto al sistema privo di parastrappi.
5.2.6 Sistema con parastrappi “tipo frizione”
Come ultimo viene ora presentato il sistema provvisto di parastrappi “tipo frizione”, il quale è stato descritto nel Paragrafo 4.5. La rigidezza di tale elemento è stata determinata con un metodo iterativo in modo che la prima frequenza propria del sistema risultasse molto vicina a quella del sistema con parastrappi in gomma a “rigidezza bassa” (Kp1). Si è operato in questa maniera per avere un immediato
confronto fra le due soluzioni di parastrappi studiate.
Adottando un valore Kp = 58N⋅m rad, per la rigidezza torsionale, si ottiene la prima frequenza propria di entità 3.37 Hz (cfr. 4.5.2). I coefficienti di smorzamento sono stati calcolati considerando il diverso contributo delle cinghie e del parastrappi rispetto alle parti in acciaio (Paragrafo 4.6), e sono riportati in Tabella 18. In particolare per il parastrappi si è considerato uno smorzamento modale ξi =0.05.
5.2.6.1 Risultati delle analisi a 1270 giri/1'
La prima simulazione, effettuata a 1270 giri/1’, ha prodotto i risultati evidenziati in Figura 5-39 e Figura 5-40. Dall’analisi di tali grafici si deduce subito una riduzione della frequenza di oscillazione dell’ultimo volano (J ) del sistema equivalente, 10 evidenziato in Figura 4-17, rispetto a quella che presentava nel modello privo di parastrappi (Figura 5-15).
Figura 5-39 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 1270 giri/1’, ottenuta con entrambi i software
Figura 5-40 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 1270 giri/1’, ottenuta con entrambi i
software
Come si nota dalla Figura 5-40 il segnale è principalmente composto da armoniche di frequenza molto prossima alla prima ed alla seconda frequenza propria del sistema (cfr. 4.5.2), del valore di 3.37 Hz e 24.51 Hz. L’ampiezza di queste è dell’ordine di 0.55 rad/s e di 0.15 rad/s. Si ha anche un contributo, di circa 0.05 rad/s di un’ armonica di frequenza pari a 10.58 Hz, che non è altro che la frequenza fondamentale che compone il momento motore al regime di giri minimo.
Confrontando questi valori con quelli ottenuti per il sistema privo di parastrappi (Sistema con cinghie - Figura 5-16 e Figura 5-17), si nota la riduzione dell’ampiezza dell’armonica avente frequenza pari alla prima frequenza propria di circa 0.3 rad/s, e dell’ampiezza dell’armonica avente frequenza pari alla frequenza fondamentale del
momento motore di circa 0.6 rad/s. Questo può determinare un effetto positivo al fine di ridurre le eventuali oscillazioni longitudinali del veicolo.
5.2.6.2 Risultati delle analisi a 4500 giri/1'
In Figura 5-41 e Figura 5-42 sono riportati gli andamenti della velocità angolare istantanea dell’ultimo volano (J ) appartenente al sistema equivalente (Figura 4-17), 10 ottenuta con entrambi i software, ed il loro contenuto in frequenza, per quanto riguarda il regime di 4500 giri/1’.
Figura 5-41 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 4500 giri/1’, ottenuta con entrambi i software
Si nota come il parastrappi abbia provocato, anche in questo caso, una riduzione della frequenza di oscillazione della velocità angolare rispetto a quella evidenziata in Figura 5-17, che si riferisce al sistema privo di smorzatore. Il grafico del contenuto in frequenza evidenzia due picchi corrispondenti ai valori di 3.37 Hz e 24.51 Hz, che sono rispettivamente la prima e la seconda frequenza propria del sistema (cfr. 4.5.2). L’ampiezza di tali armoniche è rispettivamente di circa 10 rad/s e 2 rad/s.
Confrontando i risultati con quelli riportati in Figura 5-18, relativi al sistema privo di parastrappi, si nota una riduzione dell’ampiezza di circa 5 rad/s dell’armonica di frequenza pari alla prima frequenza propria del sistema. Inoltre è rimasto pressoché invariato il contributo del secondo modo proprio.
Figura 5-42 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 4500 giri/1’, ottenuta con entrambi i
software
5.2.6.3 Risultati delle analisi a 5750 giri/1'
Figura 5-43 – Confronto fra la velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 5750 giri/1’, ottenuta con entrambi i software
In seguito alle simulazioni effettuate ad un regime di 5750 giri/1’ si sono rilevati i grafici riportati in Figura 5-43 e in Figura 5-44, riguardanti le ormai consuete variabili. Dall’analisi dell’andamento della velocità angolare istantanea dell’ultimo volano (J ) 10 si deduce che la sua frequenza è diminuita rispetto a quella rilevata nel sistema privo di parastrappi (Figura 5-19).
Come si nota dalla Figura 5-44 il segnale è principalmente composto da un’armonica di frequenza molto prossima alla prima frequenza propria del sistema (cfr. 4.5.2), del valore di 3.37 Hz, avente un’ampiezza di circa 11 rad/s.
Figura 5-44 – Confronto fra il contenuto in frequenza della velocità angolare istantanea dell’ultimo volano del sistema equivalente (J10) al regime di 5750 giri/1’, ottenuta con entrambi i
software
5.3
Confronto tra parastrappi in gomma a “rigidezza bassa” e
parastrappi “tipo frizione”
In questo paragrafo si sono volute evidenziare le differenze tra le due tipologie di parastrappi studiate.
Per prima cosa bisogna dire che il parastrappi in gomma, posto tra la ruota posteriore del veicolo e la puleggia condotta della cinghia sincrona, è una soluzione molto semplice dal punto di vista costruttivo, e quindi di gran lunga la più utilizzata nell’ambito dei motorscooter. L’altro modello di parastrappi proposto, quello “tipo frizione”, realizzato scomponendo in due parti concentriche collegate da elementi elastici la campana della frizione centrifuga che equipaggia il veicolo, è più complicato dal punto di vista costruttivo, ma risulta non visibile da un eventuale acquirente del mezzo e di difficile manomissione.
Un altro aspetto riguarda l’effetto che i due diversi modelli hanno sulla dinamica del sistema. Infatti, svolgendo le simulazioni si è notato come il parastrappi influenzi in modo sensibilmente differente la dinamica di componenti diversi dalla ruota posteriore.
Ad esempio, si è preso in considerazione la ruota condotta della cinghia dentata (Figura 2-1), visto che si trova a monte del parastrappi nel caso si utilizzi quello in gomma, ed a valle nel caso sia impiegato quello tipo frizione.
Figura 5-45 – Confronto fra le velocità angolari istantanee della puleggia condotta della cinghia dentata nei sistemi con parastrappi in gomma a “rigidezza bassa”, “tipo frizione” e senza parastrappi, al regime di 1270 giri/1’.
In Figura 5-45, si riportano gli andamenti della velocità angolare istantanea della puleggia condotta della cinghia sincrona, per quanto riguarda il regime di 1270 giri/1’. Si nota come nel caso di parastrappi in gomma la velocità angolare istantanea presenti un’oscillazione più ampia rispetto al caso di assenza di parastrappi. Al contrario adottando il parastrappi “tipo frizione”, si è avuta una leggera diminuzione di tale ampiezza.
I contenuti in frequenza (Figura 5-46 e Figura 5-47) hanno mostrato per entrambi i tipi di parastrappi la prevalenza di un’armonica di frequenza pari alla prima frequenza propria del sistema (3.56 Hz e 3.37 Hz).
Figura 5-46 – Contenuto in frequenza della velocità angolare istantanea della puleggia condotta della cinghia dentata del modello provvisto di parastrappi “tipo frizione”, al regime di 1270 giri/1’, ottenuta con MSC.ADAMS.
Figura 5-47 – Contenuto in frequenza della velocità angolare istantanea della puleggia condotta della cinghia dentata del modello provvisto di parastrappi in gomma “a rigidezza bassa”, al regime di 1270 giri/1’, ottenuta con MSC.ADAMS.
Una possibile spiegazione di tale fatto può essere che, nel caso di parastrappi in gomma, la deformata relativa al primo modo proprio di vibrare presenta il nodo proprio in corrispondenza dell’albero dove è montato il parastrappi.
Nel caso di parastrappi “tipo frizione” invece, tale nodo si trova in un’altra posizione, rendendo meno gravose le sollecitazioni sul componente considerato.
Utilizzando il parastrappi in gomma quindi, è possibile che sotto determinate condizioni di carico si abbia un mal funzionamento della trasmissione a cinghia sincrona.
Alla base dei risultati ottenuti, si può affermare che i due modelli sono pressoché equivalenti per quanto riguarda la riduzione di ampiezza e frequenza dell’oscillazione della velocità istantanea della ruota posteriore. Tuttavia, se si prendono in considerazione altri componenti del drive train, si nota come i due parastrappi agiscano su di essi in maniera nettamente differente.
In Tabella 19 si sono raccolti i dati che si ritengono più significativi al fine di comprendere meglio l’effetto dei vari parastrappi sulla dinamica dei sistemi studiati; con particolare attenzione all’insorgere delle oscillazioni longitudinali che si possono rilevare sul veicolo in fase di collaudo. I dati riguardano l’ampiezza di oscillazione delle armoniche che compongono la velocità angolare istantanea dell’ultimo volano dei sistemi equivalenti, aventi frequenza pari alla prima frequenza propria del sistema considerato ed alla frequenza fondamentale del momento motore, rilevate al regime di 1270 giri/1’.
Per una più rapida comprensione si è riportata la differenza percentuale tra il valore ricavato nei sistemi equipaggiati di parastrappi e quello ottenuto nel sistema sprovvisto di tale dispositivo (Sistema con cinghie).
Tabella 19 – Dati ricavati dalle simulazioni a 1270 giri/1’.
Sistema Ampiezza 1a frequenza s rad Differenza % Ampiezza freq. motore s rad Differenza % Cinghie 0.85 0 0.65 0 Gomma Kp1 0.60 -24 0.05 -92 Gomma 2 p K 0.50 -41 0.10 -85 Gomma Kp3 1.40 +65 0.30 -54 “Tipo frizione” 0.55 -35 0.15 -77
Per una visione più completa dei risultati ottenuti, in Tabella 20 si riportano i dati rilevati dalle simulazioni effettuate al regime di 4500 giri/1’. Anche in questo caso si è riportata la differenza percentuale tra il valore ricavato nei sistemi equipaggiati di parastrappi e quello ottenuto nel sistema sprovvisto di tale dispositivo (Sistema con cinghie).
Tabella 20 – Dati ricavati dalle simulazioni a 4500 giri/1’.
Sistema Ampiezza 1a frequenza s rad Differenza % Cinghie 15 0 Gomma Kp1 10 -33 Gomma 2 p K 10 -33 Gomma Kp3 10 -33 “Tipo frizione” 10 -33
Per una ulteriore validazione dei modelli presentati sarebbe utile effettuare delle prove sperimentali mirate, misurando la velocità di rotazione di più organi a vari regimi di funzionamento.