CAPITOLO 2
ARCHITETTURA DEI SIMULATORI DI GUIDA
2.1 STATO DELL’ARTE
Lo sviluppo tecnologico degli ultimi anni ha permesso la ricostruzione della realtà in ambiente virtuale con estrema precisione e cura del dettaglio, favorendo così la nascita dei simulatori di guida ed un loro impiego sempre più diffuso sia negli ambiti di ricerca vera e propria che in quella applicata al campo produttivo.
I simulatori, allo stato attuale, rappresentano uno strumento fondamentale per la comprensione delle interazioni uomo – veicolo – infrastruttura – ambiente, e come già accennato nella parte introduttiva, oltre a permettere prove in completa sicurezza, presentano ulteriori vantaggi rispetto alle prove su strada rappresentati fondamentalmente da:
- controllo dell'ambiente di prova e delle condizioni al contorno, che permette di monitorare diverse variabili che non sarebbe facile controllare e acquisire su strada; - efficienza, minor costo e maggiore facilità di gestione dei dati in opportuni database; - ripetitività degli esperimenti, in quanto la strada viene riprodotta più o meno
fedelmente rispetto alla realtà e resta comunque la stessa per tutte le prove con i diversi guidatori;
- facilità di riproduzione di quei parametri che nella realtà sono caratterizzati da un'elevata aleatorietà (pedoni, altri veicoli, animali, oggetti sulla strada e altri elementi che quotidianamente popolano l'ambiente di guida reale).
I simulatori di guida sono stati sviluppati a partire dagli inizi dello scorso secolo con l’obiettivo di eseguire training per i conducenti di mezzi pubblici e, solo successivamente, per testare le risposte dei drivers a tutti quegli stimoli cui sono soggetti durante la guida.
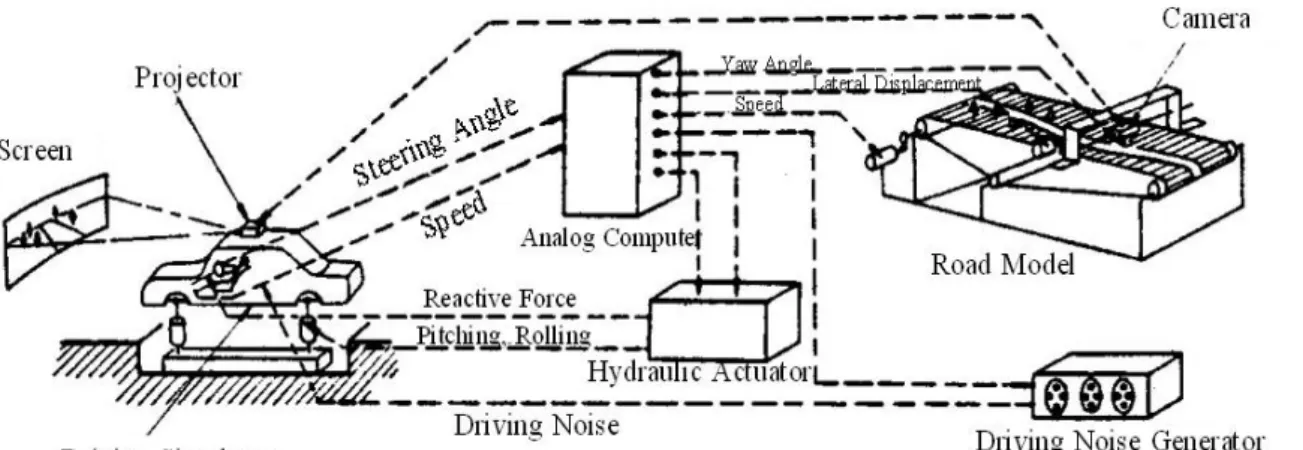
Il primo esempio di simulatore di guida funzionale e completo è stato sviluppato in Giappone dal laboratorio di ingegneria meccanica dell’Istituto Nazionale di Ricerca. Il sistema utilizzava un veicolo reale posizionato su attuatori servo-idraulici che garantivano i moti di rollio e beccheggio, mentre lo scenario riprodotto sullo schermo consisteva in immagini di un modello proiettato da una telecamera che seguiva i movimenti laterali del veicolo (Figura 1). La velocità di scorrimento delle immagini, da 0 a 180 Km/h, variava in funzione della velocità del veicolo.
Nonostante un crescente interesse verso questo tipo di sistemi, i limiti tecnologici legati alla scarsa potenza dei calcolatori e ad una bassa risoluzione dei display video hanno frenato fortemente la diffusione che lo sviluppo dei simulatori.
Figura 1 Configurazione simulatore Istituto Nazionale di Ricerca (Giappone).
Alla fine degli anni 60 si assiste ad un forte sviluppo delle tecniche di simulazione di guida, soprattutto grazie al contributo dell’Agenzia spaziale americana NASA, che porta alla nascita di diversi simulatori di guida operativi in tutto il mondo: in particolare, nei primi anni 70, la General Motors, in collaborazione con Virginia Tech, realizzò un sistema che presentava un modello di veicolo a 16 gradi di libertà, dotato di piattaforma mobile e, soprattutto, basato sulla simulazione di guida MIL “man in the loop” .
Nel 1983, la Federal Highway Administration sviluppa un simulatore a base fissa (Highway Driving Simulator - HYSIM) per avviare una campagna di studi sull’incidenza
dei fattori umani alla guida (percezione dei rischi, sistemi di controllo e sistemi intelligenti per l’identificazione delle manovre pericolose).
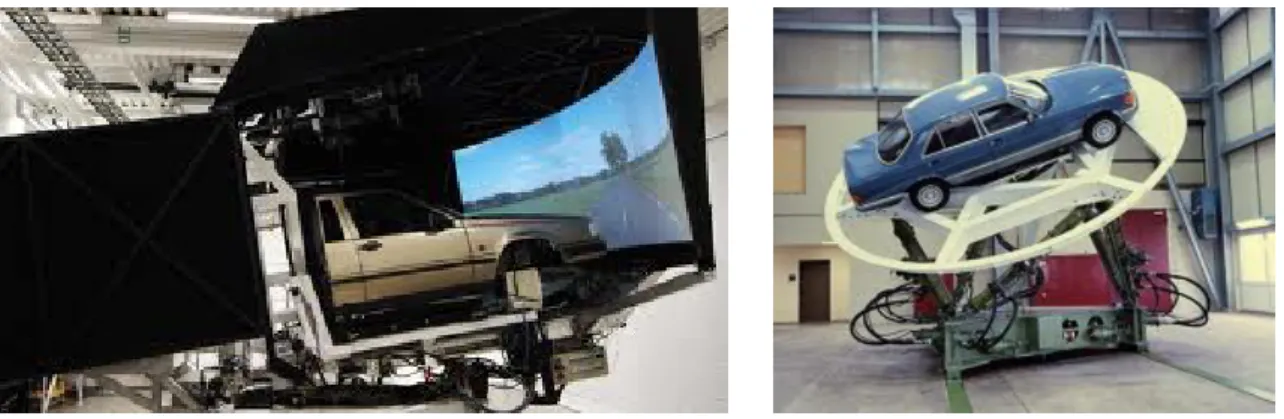
Negli stessi anni un più complesso simulatore con piattaforma mobile viene realizzato dallo Swedish National Road and Transport Research Institute a Linköping: questo sistema, oltre a fornire un ampio movimento laterale ed i moti di rollio e di beccheggio, è in grado di simulare, mediante una tavola vibrante, i moti ad alta frequenza [1] (Figura 2a).
Sempre in quegli anni, Daimler-Benz realizza il suo simulatore di guida a 6 gradi di libertà (Figura 2b):
Figura 2: a) Simulatore VTI – b) Simulatore Daimler-Chrysler
Negli ultimi anni molte aziende automobilistiche hanno iniziato a sviluppare propri simulatori di guida come ad esempio Renault, Chrysler e, su tutti, Toyota. Due simulatori molto avanzati sono ad esempio il NADS, sviluppato dal National Highway Traffic Safety Administration (USA), ed il VIRTTEX al Ford Research Laboratory. Entrambi i simulatori si sviluppano su piattaforma mobile. Il NADS, in particolare, è caratterizzato da un enorme sistema di movimento per spostamenti laterali e longitudinali che consente le migliori performance attualmente possibili.
In Italia, tra le università e gli istituti di ricerca sta diventando uso comune dotarsi di simulatori di guida:
nell’ultimo decennio, si è assistito alla nascita di una nuova generazione di simulatori di guida avanzati e, in parallelo, al diffondersi di simulatori meno complessi privi di sistemi dinamici.
Molti costruttori di autoveicoli e istituti di ricerca hanno sviluppato e applicato, inoltre, i propri simulatori per studiare e risolvere in ambiente virtuale i più svariati problemi sfruttando anche il rapido sviluppo di nuovi e sempre più veloci processori e schede
grafiche per PC che hanno permesso di ottenere un sempre più alto rapporto tra prestazioni e costi.
Gli impieghi cui sono destinati i simulatori sono molteplici; i principali ambiti di studio riguardano fondamentalmente[2] [3]:
- studi comportamentali;
- sicurezza stradale e monitoraggio del conducente; - sviluppo di nuovi sistemi di sicurezza del veicolo; - studi ergonomici;
- impieghi didattici;
- impieghi per la riabilitazione.
La configurazione di un simulatore di guida, sia da un punto di vista hardware che software, può essere molto diversa in funzione delle attività previste e dell'investimento effettuato: si individuano, comunque, una serie di sottosistemi logico-funzionali comuni a tutte le tipologie.
Per quanto riguarda la struttura hardware un simulatore può essere diviso in tre grandi blocchi:
- il veicolo o postazione di guida, con i dispositivi di input quali sterzo, pedali e cambio; - il sistema video;
- il sistema audio.
Da un punto di vista software sono invece presenti i seguenti sottosistemi: - dinamica del veicolo e modello matematico corrispondente;
- software per la riproduzione dello scenario grafico; - software per la riproduzione degli effetti sonori;
- software di gestione delle guide simulate (acquisizione dati, interventi esterni, ecc.). In base alla complessità della struttura dell'intero sistema di simulazione, i simulatori possono essere classificati secondo queste categorie:
- soluzione con monitor e comandi; - soluzione con schermi e comandi; - soluzione con veicolo e schermi; - soluzione con capsula;
A questa classificazione si aggiunge la possibilità, applicabile in teoria a ogni schema di simulatore elencato, di avere la postazione di guida mobile: per ottenere un elevato grado di realismo, infatti, è necessario riprodurre anche i movimenti della cassa del veicolo (rollio, beccheggio, scuotimento della massa sospesa) e di conseguenza le forze d'inerzia agenti sul conducente, utilizzando, in genere, una base mobile con 6 gradi di libertà.
Vediamo ora, in termini generali, le categorie di simulatori appena elencate.
2.1.1 Simulatori Con Monitor E Comandi
Rappresentano la tipologia più semplice in quanto sono costituiti da un sedile di guida, i comandi (pedaliera, sterzo e cambio, quando non è automatico) e uno o tre monitor da computer (Figura 3). Le soluzioni con un solo monitor tendono a confondersi con i videogiochi, mentre la soluzione con tre schermi è molto più diffusa come simulatore di basso costo, in quanto garantisce una migliore sensazione del conducente di sentirsi all'interno dell'ambiente virtuale[4].
I simulatori con monitor possono essere anche realizzati in unica struttura compatta (in particolare le soluzioni commerciali) e, a volte, sono dotati di piattaforma mobile.
Figura 3: Simulatori con comandi e tre monitor (a sinistra) e un solo monitor
2.1.2 Simulatori Con Schermi E Comandi
Questa categoria di simulatori rappresenta una diretta evoluzione della precedente in cui, al posto dei monitor, è previsto l'impiego di schermi che permettono di estendere il campo visivo del conducente, aumentando notevolmente la sensazione di realismo durante la guida.
Le tipologie di schermi utilizzati sono: schermo singolo piatto, tre schermi piatti o uno schermo cilindrico (Figure 4a e 4b). L'ultimo caso presenta il vantaggio di non mostrare discontinuità nell'immagine dovuta al raccordo tra gli schermi piatti ma è decisamente più costosa.
Figura 4: a) Simulatore con un monitor e comandi con piattaforma mobile – b) Simulatore con schermo cilindrico e comandi.
2.1.3 Simulatori Con Veicolo E Schermi
E’ senza dubbio la tipologia di simulatore più utilizzata nei centri di ricerca sia universitari che privati e prevede l'impiego di un veicolo reale (o di una sua parte) con uno o tre schermi posizionati di fronte a esso (Figura 5). Questa soluzione permette di riprodurre in modo realistico ed economico la postazione di guida, semplificando anche la realizzazione del software grafico per il fatto che non è richiesta la riproduzione grafica dell'abitacolo e del cruscotto. Anche in questo caso si possono avere diverse tipologie di schermi (singolo, tre schermi o schermo cilindrico) e il veicolo può essere installato su una piattaforma mobile.
2.1.4 Simulatori Con Capsula
Il simulatore con capsula rappresenta, invece, la soluzione più complessa e costosa tra quelle esaminate: il sistema consiste in una grossa capsula, realizzata con materiali plastici e leghe leggere, attuata da pistoni idraulici. All’interno, sulle pareti, vengono proiettate immagini virtuali a 360° e viene riprodotto l'audio tipico dell'ambiente circostante.
All'interno della capsula può essere prevista tanto una semplice postazione di guida con comandi quanto un'intera vettura reale o un mezzo veicolo.
Simulatori di questo tipo sono quello della Daimler-Chrysler o il National Advanced Driving Simulator (NADS) precedentemente citati [5] (Figura 6).
Figura 6: Simulatore con capsula NADS.
2.1.5 Simulatori Con Visori Stereoscopici
Rappresentano una categoria a parte in quanto implementano solo i comandi con cui il conducente ha un contatto fisico mentre riproducono virtualmente tutto il resto (cruscotto, veicolo, strada, ecc.) utilizzando occhiali a vista stereoscopica e guanti sensorizzati, indispensabili per la riproduzione grafica delle mani del conducente e della loro interazione con i comandi (Figura 7). Questi simulatori si prestano molto bene anche per lo studio degli interni del veicolo e dell'ergonomia dei comandi [6].
Figura 7: Simulatore con visori stereoscopici e guanti per riprodurre le mani
2.2 ARCHITETTURA DEI SIMULATORI DI GUIDA
Le caratteristiche di un simulatore di guida devono essere strettamente legate con il tipo di applicazione per cui verrà utilizzato.
I simulatori di guida, come già detto in precedenza, possono essere suddivisi in sotto-sistemi differenti qui di seguito richiamati:
- Sistema visivo; - Sistema sonoro; - Ritorno di forza; - Modello dinamico; - Modello di traffico; - Scenario.
Tutti questi sotto-sistemi devono agire insieme in modo da provocare nell’utente la sensazione di controllare un veicolo reale [7]. Altro aspetto fondamentale da controllare è il ritardo tra azione e reazione, causa perdita di realismo ed elevata probabilità che il conducente avverta uno stato di malessere (mal di testa, nausea).
A questo punto si passa ad analizzare le caratteristiche dei sotto-sistemi appena elencati.
2.2.1 Sistema visivo
La guida di un veicolo è un compito strettamente legato alla vista, per cui il sistema visivo deve fornire tutte le informazioni necessarie ai conducenti con il massimo grado di realismo possibile allo scopo di garantire risposte attendibili da parte di questi ultimi durante l’esercizio della guida.
Per garantire la massima verosimiglianza dello scenario riprodotto con la realtà è necessario analizzare i seguenti fattori principali:
- Transport delay e Frame rate; - Dimensione dello schermo; - Risoluzione;
- Acuità visiva.
Transport delay e frame rate sono due parametri utilizzati per il calcolo dei ritardi nella
restituzione grafica di un certo scenario: il primo definisce il tempo che intercorre tra il
calcolo del modello tridimensionale e l’istante in cui l’immagine viene visualizzata, mentre
il secondo rappresenta la frequenza di cattura o riproduzione dei fotogrammi che compongono un filmato.
Per garantire un sufficiente realismo e non influenzare il driver in maniera anomala il ritardo totale in un simulatore di guida dovrebbe essere inferiore a circa 40-60 ms; il frame rate minimo è fissato, generalmente, in 25 Hz anche se la frequenza di riproduzione ottimale di un filmato, affinché l'apparato visivo umano non percepisca sfarfallii e artefatti e si presenti estremamente fluida, si attesta sui 60 Hz (può anche essere superiore per gli oggetti che si muovono molto veloci sullo schermo). Sebbene un filmato sembri mostrare delle immagini in movimento, infatti, in realtà ciò che viene visualizzato è una sequenza di immagini fisse. Una prima spiegazione di questo fenomeno dal punto di vista biologico, fu ipotizzata dal fisico belga Joseph Plateau, nel XIX secolo, secondo il quale la percezione del movimento continuo era dovuta alla persistenza delle immagini sulla retina; questa teoria fu successivamente smentita da Max Wertheimer secondo cui è il cervello che, secondo meccanismi non ancora del tutto chiariti, esegue un'operazione di "assemblaggio" dei singoli fotogrammi, interpretandolo come un movimento.
I ritardi grafici possono comportare elevati rischi di malessere per i guidatori.
La risoluzione dipende essenzialmente dalla distanza dallo schermo e dagli angoli di visione: l’ideale sarebbe avere all’incirca 20 pixels per grado anche se sono consentite risoluzioni minori per gli schermi laterali e per gli eventuali schermi posteriori, in quanto il campo visivo diretto è di circa 60°x 30°.
Tenendo conto del fatto che la sensazione della velocità è legata al campo della visione periferica appare evidente la necessità di uno schermo di almeno 120°x30°, con almeno tre proiettori [8].
Gli schermi retrovisori non sono fondamentali ma possono risultare necessari per tutte quelle tipologie di analisi che tengono conto delle interazioni con altri veicoli o per garantire una migliore percezione della velocità.
2.2.2 Sistema sonoro
Il sistema sonoro, pur non fornendo indicazioni dirette al guidatore su quel che accade, rappresenta un elemento essenziale per dare una efficace impressione di realismo, nonostante questo sia il sistema, tra quelli considerati, verso cui vengono indirizzati i minori sforzi, sia dal punto di vista degli studi che dell’impegno economico.
Per avere il massimo realismo sarebbe necessario avere un suono che permetta di avvertire la sorgente sonora e che questo sia in accordo con lo scenario grafico per evitare di disorientare il guidatore.
Questa condizione non è di semplice applicazione in quanto la regione delle frequenze dei suoni avvertibili all’interno di un veicolo copre alcune migliaia di Hertz.
Il metodo più semplice e più pratico di ricostruzione del suono consiste nel combinare con il modello grafico e del veicolo, in tempo reale, le librerie relative ai suoni provenienti da motore, vento e irregolarità stradali.
2.2.3 Ritorno di forza
Con il termine ritorno di forza si intende l’insieme delle forze che si manifestano per effetto di un cambio di moto del veicolo e di quelle restituite dai comandi del veicolo (volante, pedali ecc).
Il sistema di simulazione deve riprodurre fedelmente tutte le forze a cui un guidatore è soggetto in seguito ai movimenti del veicolo e dovuti a variazioni nel tracciato, alle condizioni della strada e al comportamento di guida dello stesso driver.
E’ ovvio quindi che sarà di fondamentale importanza riprodurre le accelerazioni legate ai movimenti del veicolo: in particolare, i moti di rollio e di beccheggio sono caratterizzati prevalentemente da frequenza maggiore (vibrazioni del veicolo) rispetto all’imbardata, che avviene a bassa frequenza (è legata alle azioni del conducente), ragion per cui è necessario, per simulare il tutto in maniera efficace, ricorrere a sistemi differenti a seconda dell’azione da applicare al conducente (i sistemi più comuni sono rappresentati da tavole vibranti, pedane mobili ecc).
E’ altrettanto evidente che l’accuratezza del livello di simulazione dipende essenzialmente dalle applicazioni e dagli scopi che si vogliono perseguire: l’analisi degli studi riportati in letteratura dimostra, infatti, che un simulatore a base fissa come quello sviluppato nel presente progetto di ricerca, ad esempio, può essere considerato sufficiente per molti test in cui le manovre del veicolo non producono accelerazioni superiori a 0,3g. Viceversa, quando si vuole testare la reazione del guidatore, la percezione fisica delle forze diventa basilare ai fini della bontà delle misure eseguite, ed è quindi necessario installare dei sistemi a bassa frequenza. Parallelamente alla simulazione delle forze avvertite durante la marcia per effetto dei cambi di moto è molto importante ricostruire anche le sensazioni che si avvertono alla guida: queste dipendono, in larga misura, dalle forze restituite ai comandi del veicolo, in particolare da volante e pedali, per cui il sistema del ritorno di forza è assolutamente necessario al fine di rendere il sistema quanto più realistico possibile e minimizzare la varianza nelle sterzate.
Il realismo del modello dipenderà da diversi fattori, quali le forze agli pneumatici e la reale dinamica del volante e dalla elevata frequenza di aggiornamento (in genere > 100 Hz), altrimenti si perderà molto in precisione.
La tecnica usuale per creare il ritorno di forza al volante consiste nel connettere un servomotore alla colonna dello sterzo, mentre, per quanto riguarda il ritorno di forza ai pedali, si può simularlo servendosi di sistemi meccanici esistenti in un veicolo reale in modo da ottenere un ritorno di forza reale.
2.2.4 Modello dinamico
Allo stato attuale i simulatori di guida utilizzano modelli di veicolo che sfiorano la perfezione, grazie soprattutto allo sviluppo tecnologico e a calcolatori sempre più potenti. In aggiunta a questi due fondamentali aspetti si deve considerare anche la possibilità data, in alcuni casi, di poter utilizzare gli stessi modelli e gli stessi programmi che gli ingegneri meccanici usano nella progettazione dei loro veicoli, permettendo così di valutare in maniera diretta le performance del veicolo ed il comfort di guida.
2.2.5 Modello di traffico
E’uno degli aspetti più complessi da trattare a livello di simulazione. Per garantire un realismo appropriato e simulare le molteplici e complesse interazioni che nascono per la
presenza di altri veicoli, il traffico generato al computer deve riprodurre in maniera accurata il comportamento di guida nella sua globalità, a livello strategico ed operativo. Ciò implica che ogni veicolo simulato dovrà essere indipendente ed autonomo, caratterizzato cioè da un modello di veicolo ed un modello decisionale.
Allo stato attuale, a seconda delle risorse economiche disponibili, vengono utilizzati diversi tipi di software per gestire la modellazione del traffico: alcuni sono solo in grado di far muovere un veicolo lungo un percorso predefinito con determinati parametri cinematici, altri sono caratterizzati da un grado elevato di interattività e gestiscono situazioni complesse. Ovviamente questi modelli presentano una certa imprecisione legata ad un non sempre corretto comportamento fisico dei veicoli (ad esempio sterzate, posizioni scorrette di inizio manovra, comportamenti non gestibili con le leggi di traffico ecc) per cui il processo decisionale dei veicoli autonomi non può essere considerato totalmente intelligente. L’accuratezza di questi modelli, pertanto, va gestita in funzione degli scopi da raggiungere tenendo conto anche del fatto che un numero importante di sperimentazioni al simulatore di guida non richiedono necessariamente un modello di traffico particolarmente elaborato: infatti, in alcuni casi, può sembrare paradossale che l’eccessiva accuratezza del modello potrebbe risultare controproducente, in quanto limita il controllo degli scenari di guida e la libertà del soggetto testato nel processo di scelta sul tipo di manovra da eseguire.
2.2.6 Scenario
Con i simulatori è possibile interagire in tempo reale per cui è possibile far accadere specifiche situazioni nell’istante desiderato (controllo del traffico, attraversamento di pedoni ecc). Allo stato attuale è possibile gestire semplici compiti come dare istruzioni sul percorso, spiegazioni standard su ciò che accade e feedback sugli errori. Compiti più complessi sono attualmente quasi impossibili per un computer, come ad esempio verificare il carico mentale di un driver o capire se la percezione del percorso da parte dello stesso driver è corretta o distorta, a meno che non si integri il sistema di simulazione con appositi sensori biomedici capaci di descrivere in tempo reale lo stato del conducente.
2.3 AMBITI DI STUDIO
I simulatori di guida sono un’applicazione tecnologica che ha conosciuto un grande sviluppo negli ultimi anni grazie al crescere delle performance dei computer e ad una consistente riduzione nei costi, fattori che hanno consentito all’industria automobilistica di realizzare interessanti simulatori di veicoli impiegati, in maniera molto soddisfacente, in svariati campi applicativi.
I simulatori, come già premesso, forniscono un ambiente sperimentale sicuro e replicabile, per cui risultano ideali e vantaggiosi per gli studi sulla sicurezza stradale e sull’addestramento alla guida, consentendo la misurazione in condizioni di assoluta sicurezza delle reazioni dei guidatori in situazioni critiche.
L’utilizzo del simulatore, al posto degli studi su strada, elimina, inoltre, il pericolo di incidenti dovuti ad un errato funzionamento del sistema o agli errori commessi dal conducente; allo stesso tempo permette l’addestramento di giovani guidatori, consentendo a questi ultimi di sperimentare diverse situazioni pericolose appositamente ricostruite. In generale, i simulatori vengono utilizzati per condurre studi sperimentali accuratamente controllati, in cui le variabili sperimentali vengono isolate da fattori che possono influenzare le performance del guidatore.
Gli studi principali finora condotti attraverso questo tipo di sistemi di simulazione, presi in considerazione per lo sviluppo del presente progetto di ricerca, hanno riguardato essenzialmente:
2.3.1 Comportamento di guida
Questa tipologia di studi riguarda essenzialmente gli aspetti psicologici e comportamentali, le distrazioni, le prestazioni, le persone anziane, ecc. Considerato che è rischioso guidare in uno stato alterato su strada, molti ricercatori hanno utilizzato la simulazione di guida virtuale come strumento fondamentale per valutare questi aspetti. Esistono molti studi che analizzano, ad esempio, l'influenza dell’uso del telefono cellulare alla guida [9] [10] [11], la variazione nella concentrazione di ossigeno al variare del carico di lavoro [12] [13] o gli effetti sul comportamento legati all’affaticamento e/o al colpo di sonno [14].
I sistemi di simulazione possono raccogliere dati dettagliati sulle performance di guida (e.g. controllo dei pedali, del volante, marcia inserita, etc.) e condurre successivamente uno studio quantitativo. La caratteristica fondamentale degli studi sopra riportati è
rappresentata dal fatto che, durante la guida, questi test comportano maggiori rischi dovuti ad un aumento del carico di lavoro mentale o ad alterazioni psico-fisiche, per cui bisogna prendere atto che questi tipi di esperimenti non possono essere condotti facilmente in una reale condizione di guida.
Un altro genere di studi eseguiti con simulatori di guida permette di determinare delle misure di performance di guida. Gli studi di settore evidenziano l’efficacia dell’uso dei simulatori per la raccolta dei dati nelle differenti manovre di guida (sorpasso e cambio corsia in particolare). Il rovescio della medaglia è rappresentato dal comportamento al volante in un ambiente simulato, che in alcuni casi, si è dimostrato differente rispetto alla guida di un veicolo reale: questo implica che la fedeltà o la validità del simulatore di guida dovrebbe essere un problema da investigare prima di eseguire qualsiasi tipo di prova e di avvalersi dei dati misurati. Se la validità dovesse risultare bassa i dati misurati hanno uno scarso significato ai fini dell’analisi che si va a svolgere. Accanto a questi studi non vanno dimenticate le sperimentazioni condotte nel campo della psicologia del traffico allo scopo di trovare correlazioni tra gli aspetti psicologico-comportamentali e la frequenza degli eventi incidentali [15].
2.3.2 Addestramento
Gli studi relativi a questa categoria sono rivolti, fondamentalmente, alla ricostruzione di situazioni di rischio per l’addestramento di giovani conducenti. E’ evidente che queste sperimentazioni sono particolarmente rischiose se eseguite su strada per cui sono state condotte analisi su guidatori giovani e anziani per stimare come l'età, combinata con una dose modesta di alcol, influenzi le performance in una guida simulata (Barkley et al.,2005, Leung et Starter, 2005): in particolare questi studi hanno analizzato diversi compiti di guida tra cui in particolare la stima della distanza di visibilità per il sorpasso [16] [17]. Pradhan et al. (2006) hanno invece studiato la percezione del rischio nei giovani guidatori riproducendo in ambiente virtuale situazioni a rischio e valutando la loro risposta [18].
2.3.3 Progettazione e verifica di infrastrutture
La simulazione di guida può rivelarsi utilissima anche nel campo della progettazione e della valutazione dell’efficienza della segnaletica stradale.
Ad esempio, studi condotti da Upchurch et al. (2002), sulla tipologia e la disposizione dei segnali di uscita dei tunnel che attraversano il centro di Boston hanno mostrato che la riduzione dei segnali di uscita può provocare nei conducenti, specialmente in quelli non abituali, difficoltà nell’ottenere informazioni sulla direzione da seguire, generando una riduzione nella sicurezza dovuta ad un repentino cambiamento di corsia ed ad altre manovre [19].
Altre analisi molto utili nel campo della progettazione sono quelle svolte dal CRISS relative alla definizione, in ambito extraurbano, dei profili di velocità e alla determinazione dei tassi di accelerazione/decelerazione o alla segnalazione più opportuna delle aree di cantiere, soprattutto nelle ore notturne [20] [21].
2.3.4 Sistemi di trasporto intelligenti
I principali studi riguardano l’utilizzo del cruise control e dei sistemi di avviso anti-collisione sulla riduzione della soglia di attenzione dei conducenti.
2.3.5 Medicina e Genetica
Il consumo di sostanze tossiche provoca una riduzione in termini di prestazioni da parte dei conducenti con conseguente riduzione delle condizioni di sicurezza di una infrastruttura. La letteratura propone diversi studi in merito sia con riguardo al calcolo dei tempi di percezione e reazione in seguito all’assunzione di alcool o droghe leggere sia in relazione alla capacità degli utenti di smaltire tali sostanze.
BIBLIOGRAFIA
1. VTI, Driving simulator, http://www.vti.se/templates/Page3257.aspx, 2006.
2. A. Malvasi, Sviluppo di un simulatore di guida di autoveicolo per studi di
sicurezza preventiva. Tesi di dottorato di ricerca in veicoli terrestri e sistemi di trasporto, Università di Pisa, 2007.
3. INRETS, Modelling, simulation and driving simulators,
http://www.inrets.fr/ur/msis/simus/sim2e.htm, 2006.
4. STISIM. Stisim the low-cost interactive driving simulator, http://www. systemstech.com/content/view/23/39/, 2006.
5. NADS, The national advanced driving simulator at the university of Iowa, http://www.nads-sc.uiowa.edu/facilities.htm, 2006.
6. UM VRL, Virtual prototyping of automotive interiors, www-vrl.umich.edu/project/automotive/, 2005.
7. R. W. Allen, T. Rosenthal, B. Aponso, A. Harmsen, Markham, S. Low cost
PC-based techniques for simulation implementation, In Proceedings of Driving
Simulation Conference Europe 1999.
8. J. Törnros, L. Harmas, H. Alm, The VTI driving simulator – validation studies, In Proceedings of Driving Simulation Conference Europe 1997.
9. Y.C. Liu, Effects of Taiwan In-Vehicle Cellular Audio Phone System on Driving
Performance, Safety Science 41, 2003.
10. M. E. Rakauskas, L. J. Gugerty, N. J. War, Effects of naturalistic cell phone
conversations on driving performance, Journal of Safety Research 35 (2004) 453–
464.
11. J. Tornros, A. Bolling, Mobile phone use – effects of conversation on mental
workload and driving speed in rural and urban environments, Transportation
Research Part F9, 2006.
12. Eun-Jung Sung, Byung-Chan Min, Seung-Chul Kim and Chul-Jung Kim, Effects of
oxygen concentrations on driver fatigue during simulated driving, Applied
Ergonomics Volume 36, Issue 1, January 2005, Pages 25-31.
13. P. Thiffault, J. Bergeron, Monotony of road environment and driver fatigue: a
simulator study, Accident Analysis and Prevention 35 (2003) 381–391.
14. Hong J. Eoh, Min K. Chung, Seong-Han Kim, Electroencephalographic study of
drowsiness in simulated driving with sleep deprivation, International Journal of
15. N. Sümer, Personality and behavioral predictors of traffic accidents: testing a
contextual mediated model, Accident Analysis & Prevention Volume 35, Issue 6,
November 2003, Pages 949-964.
16. S. Leung, G. Starmer, Gap Acceptance and Risk-Taking by Young and Mature
Drivers, both Sober and Alcohol-Intoxicated, in a Simulated Driving Task.
Accident Analysis & Prevention 37, 2005.
17. Y.C. Liu1, C.H. Ho The effects of different breath alcohol concentration and post
alcohol upon driver's driving performance, Industrial Engineering and Engineering
Management, 2007.
18. A. K. Pradhan, D. L. Fisher, and A. Pollatsek, Risk Perception Training for Novice
Drivers - Evaluating Duration of Effects of Training on a Driving Simulator, 85th
Annual Meeting of the Transportation Research Board, Washington, D.C. January 2006.
19. J. Upchurch, D. L. Fisher, R.A. Carpenter, A. Dutta, Freeway Guide Sign Design
with Driving Simulator for Central Artery-Tunnel:Boston Massachusetts.
Transportation Research Record, n 1801, 02-2981, 2002.
20. F. Bella, Validation of a Driving Simulator for Work Zone Design, Transportation Research Record, Journal of the Transportation Research Board, 2006.
21. F. Bella , Assumptions of operating speed-profile models on deceleration and
acceleration rates: Verification in the driving simulator, TRB Annual Meeting