Capitolo 3
Modelli di Pneumatico
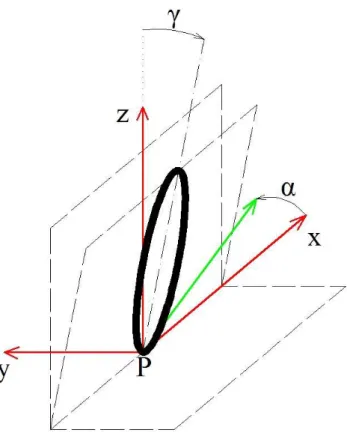
In questo capitolo verranno descritti i modelli elaborati per simulare il comportamento del pneumatico, in termini di reazioni che nascono nel con-tatto a terra, durante il moto. Dal punto di vista dinamico, risulta di fondamentale importanza schematizzare il comportamento del pneumatico nelle diverse condizioni di utilizzo. Nella trattazione saranno utilizzate le convenzioni per i segni visibili in Fig. 3.1. L’origine P viene presa all’in-tersezione tra il piano stradale, il piano medio longitudinale della ruota ed il piano verticale contenente l’asse di rotazione. In un lavoro come il pre-sente, che è focalizzato nello studio della dinamica laterale del motociclo a velocità longitudinale pressoché costante, l’azione del pneumatico che deve essere presa in considerazione per prima è quella di fornire le opportune forze laterali (Fy), che rendono possibile la percorrenza di traiettorie desiderate.
Tuttavia, è opportuno ricordare che, in generale, esistono anche altre azioni che nascono all’interfaccia fra il pneumatico e la strada (forza longitudinale, etc.) e di seguito ne saranno considerate alcune.
3.1
Modello lineare rilassato
In un autoveicolo, in prima approssimazione, si può asserire che le azioni laterali Fy sono funzione dell’angolo di deriva α (vedi sezione 2.9) e del carico
verticale Fz. In un motoveicolo, non si può non tenere conto dell’influenza
che l’angolo di camber ha sulle azioni che si generano fra pneumatico e stra-da. Poiché uno degli obiettivi del presente lavoro è quello di valutare la
3.1 Modello lineare rilassato 39
Figura 3.1: Sitema di riferimento per la schematizzazione del pneumatico coppia di sterzo necessaria per guidare il motoveicolo, è opportuno conside-rare un’altra azione, il momento di autoallineamento1
Mz; esso non deve
essere confuso con il momento rispetto all’asse di sterzo dovuto al prodotto della forza laterale per l’avancorsa. In un motoveicolo, un’altra azione che diventa rilevante, a causa degli elevati angoli di camber che si raggiungono anche in un utilizzo non sportivo, è il momento Mx, comunemente chiamato
momento raddrizzante. Volendo esprimere quanto appena esposto in termini matematici:
Fy = Fy(α, γ, Fz)
Mz = Mz(α, γ, Fz)
Mx = Mx(α, γ, Fz)
(3.1)
γ è il rollio della ruota, da non confondere con il rollio del motociclo. La funzione caratteristica Fy(α, γ, Fz), se si suppone il carico verticale costante,
può ulteriormente essere semplificata nella forma Fy(α, γ). Per piccoli angoli
1
In realtà la definione di autoallineante è fuorviante, ma ormai diffusa. Per chiarimenti si veda [1] pag.20.
3.1 Modello lineare rilassato 40
di deriva e di camber, ipotizzando di poter separare gli effetti dovuti alla deriva ed al camber e sommarli, si può linearizzare la relazione caratteristica:
Fy = Cαα + Cγγ (3.2) Dove: Cα = ∂Fy ∂α ¯ ¯ ¯ ¯ α=γ=0 (3.3) Cγ = ∂Fy ∂γ ¯ ¯ ¯ ¯ α=γ=0 (3.4) Cα viene detta rigidezza di deriva, Cγ rigidezza di camber; esse esprimono
una dipendenza di tipo lineare della forza laterale dall’angolo di deriva e da quello di camber. Per quanto riguarda Mz si può asserire, con analogo
simbolismo: Mz = Cα′α + Cγ′γ (3.5) C′ α = ∂Mz ∂α ¯ ¯ ¯ ¯ α=γ=0 (3.6) C′ γ = ∂Mz ∂γ ¯ ¯ ¯ ¯ α=γ=0 (3.7) Le relazioni (3.2) e (3.5) forniscono azioni istantanee quando sono imposti α e γ; nella realtà questa schematizzazione risulta utile solo se si vogliono investigare i comportamenti a regime; infatti il raggiungimento del valore dato dalle (3.2) e (3.5) non può essere istantaneo a causa delle deformabilità interne al pneumatico. Se interessa lo studio dei transitori, in analogia a quanto esposto in [2], si può introdurre una relazione come la seguente:
σ
uX(t) + X(t) = X(α(t), γ(t))˙ (3.8)
Dove:
• σ è detta lunghezza di rilassamento • u è una velocità
• X(t) è la generica azione che si vuole schematizzare
• X(α, γ) rappresenta la funzione che esprime l’azione X in condizioni stazionarie.
3.2 Modello Look-up Table 2D 41
La soluzione della (3.8) è la X(t), che rappresenta l’andamento della azione generica X in funzione del tempo; la soluzione della equazione omogenea associata è il seguente:
Xo(t) = Λe−
u σt
Λ è costante e, poiché u/σ è positivo, l’integrale particolare tende a 0 per t → +∞. La soluzione particolare dipende da α(t) e da γ(t); se α e γ sono costanti, si può assumere:
Xp = X(α, γ)
Ipotizzando che il valore iniziale di X sia nullo, la soluzione generale è somma di Xp e di Xo:
X(α, γ, t) = X(α, γ)¡1 − e−u
σt¢ (3.9)
3.2
Modello Look-up Table 2D
Con il termine Look up table si indica il metodo più usato per la costruzione delle funzioni matematiche non dinamiche2
a partire da dati sperimentali. Le funzioni look up suppliscono alla impossibilità di effettuare delle misure spe-rimentali per tutti i possibili valori degli ingressi: l’uscita è calcolata per un ingresso generico come interpolazione dele uscite specificate in corrisponden-za delgli ingressi più prossimi a quello d’interesse.
Simulink dispone di diversi blocchi per l’implementazione delle funzioni look up. Il blocco Look-up Table 2D consente di implementare una funzione di due variabili del tipo y = F (x1, x2). I valori dell’uscita sono definiti tramite
una matrice. In funzione del valore assunto dal primo ingresso si determinano le righe da utilizzare; il secondo ingresso determina quale delle colonne della matrice di uscita utilizzare. Il valore di uscita è calcolato per interpolazione dei valori della matrice selezionati. Esiste la possibilità di utilizzare un blocco che permette di utilizzare funzioni del tipo y = F (x1, x2, . . . , xn). Entrambi
i blocchi consentono di specificare il tipo l’interpolazione e l’estrapolazione, che possono essere di tipo:
• Lineare
2
3.2 Modello Look-up Table 2D 42
• Spline
• Costante a tratti
Potendo disporre di dati sperimentali, l’uso di questo tipo di blocchi risulta molto conveniente; infatti, facendo attenzione ad usare breakpoints3
in un range di valori prossimo a quello di utilizzo, è possibile risolvere il problema degli effetti combinati (rollio/deriva) in maniera semplice ed economica.
Per rappresentare il comportamento di un pneumatico motociclistico per quanto concerne le forze laterali (Fy) ed i momenti di autoallineamento (Mz),
sono stati scelti come ingressi del blocco l’angolo di deriva e l’angolo di camber (rollio), poiché si è ipotizzato costante il carico verticale. Qualora si volesse inserire anche Fz come ingresso del sistema, sarebbe necessario costruire una
matrice tridimensionale, dove in ascissa ed in ordinata rimarrebbero gli angoli di deriva e di camber, mentro nella terza dimensione verrebbe inserita la nuova variabile. Per far questo sarebbe necessario disporre di varie prove a carico verticale costante.
Il valore in uscita dalla look-up table rappresenta il valore a regime di Fy e Mz. Ripetendo il ragionamento svolto in (3.1), è opportuno introdurre
una legge del tipo (3.9), qualora interessi schematizzare il funzionamento del pneumatico durante i transitori4
.
3
I breakpoints sono i valori misurati da inserire nella funzione look up.
4
il modo di guidare un motociclo (mezzo instabile per definizione) rende impossibile trascurare il comportamento durante i transitori.