2. I
SISTEMI
GPS
E
G
ALILEO
In questo capitolo saranno presentate: le architetture, i segnali ed i codici utilizzati per i due sistemi di posizionamento satellitare GPS e Galileo; inoltre saranno fatte delle osservazioni sulla possibile compatibilità ed interoperabilità tra i due sistemi.
2.1 Il sistema GPS
Il progetto GPS, noto anche con il nome di NAVSTAR-GPS (NAVigation System with Timing And Ranging Global Positioning System), risale al 1973. Questo sistema di posizionamento satellitare, concepito e promosso dal Ministero della Difesa statunitense, nasce per scopi esclusivamente militari e diventa operativo per la prima volta nel 1994. Nonostante sia nato come sistema militare, dopo poco tempo, viene reso disponibile anche per uso civile, ma, per ragioni di sicurezza nazionale, la precisione per tale utilizzo è stata volutamente degradata. Solo nel Maggio del 2000 il DoD (Department of Defense) ha deciso di rimuovere il disturbo, riservandosi però la facoltà di poterlo reinserire in qualsiasi momento in caso di necessità e senza preavviso.
La disponibilità del segnale GPS 24 ore su 24 in ogni angolo del globo permette di conoscere i seguenti 4 parametri fondamentali: latitudine, longitudine, altitudine e tempo. La conoscenza di tali parametri permette la determinazione della posizione esatta di un veicolo e, quindi, la possibilità di realizzare sistemi d’allarme e di navigazione.
Il posizionamento è ottenibile attraverso due distinte tecniche operative, diverse sia concettualmente sia per il grado di precisione:
Point Positioning (posizionamento assoluto di un punto singolo nel sistema di riferimento assegnato). Le informazioni ricevute dai vari satelliti sono elaborate in modo indipendente per determinare, anche in tempo reale, la posizione, la velocità e la traiettoria del ricevitore stesso. La precisione dell’ordine della decina di metri dipende dalla qualità del ricevitore usato.
Differential Positioning (posizionamento differenziale). In questo caso sono utilizzati almeno due ricevitori. Le informazioni acquisite vengono elaborate congiuntamente per determinare il “baseline”, cioè il vettore che collega i centri delle antenne e, quindi, la posizione reciproca dei ricevitori stessi. Tale metodo permette di raggiungere una precisione superiore a quella ottenibile mediante la tecnica precedente, ma è attuabile solo se si conosce la posizione di un ricevitore di riferimento; solo così è possibile stimare le coordinate degli altri ricevitori. E’ possibile effettuare il posizionamento relativo in tempo reale solo se i ricevitori possono comunicare fra loro, altrimenti i dati raccolti vengono memorizzati ed elaborati a posteriori per ricostruire le posizioni reciproche occupate durante il rilievo.
2.2 I segmenti del sistema GPS
Il sistema GPS può essere schematizzato in tre distinti segmenti:
space segment; control segment; user segment.
2.2.1 Space segment
Il segmento spaziale è composto da una costellazione di 28 satelliti artificiali - dei quali 24 operativi- distribuiti su 6 piani orbitali, distanziati fra loro di un angolo di 60° e formanti un angolo di 55° rispetto al piano equatoriale (figura 2.1)
.
Tale scelta è stata dettata dall’esigenza di poter coprire tutta la superficie del globo terrestre con il vincolo che da ogni punto siano visibili contemporaneamente almeno 4 satelliti (in ogni punto della terra è sempre possibile "vedere" tra cinque e otto satelliti per ovviare ad eventuali problemi dovuti al mancato funzionamento di uno di questi).Le orbite dei satelliti, non geostazionarie, sono quasi circolari con un raggio orbitale di circa 26600 Km.
Figura 2.1 Orbita dei satelliti GPS
La velocità di rotazione dei satelliti è di 3874 m/s per un periodo di rivoluzione attorno alla terra di 11 ore e 58 minuti. Per un osservatore che si trovi sulla superficie
della Terra ed approssimando il periodo di rivoluzione di un satellite a 12 ore, questo si troverà sullo stesso punto della superficie dopo due giri completi, cioè dopo 24 ore. La figura 2.2 mostra la traiettoria che un satellite percorre nelle 24 ore, prima di ritrovarsi nel punto di partenza.
Figura 2.2 Traiettoria di un satellite
Riguardo alla posizione dei satelliti rispetto ad un dato punto sulla superficie terrestre, bisogna anche mettere in conto la rotazione della Terra stessa. Approssimando a 12 ore il tempo di rivoluzione del satellite, considerate le 24 ore di rotazione della Terra, possiamo allora dire che questo si troverà sulla verticale dello stesso punto della superficie dopo 24 ore, cioè dopo due giri di rivoluzione completi.
Ogni satellite è dotato di pannelli solari e di retrorazzi per eseguire manovre correttive sull’orbita che può subire fluttuazioni periodiche a causa di molteplici fattori, tra i quali i principali sono: la non perfetta sfericità della Terra e le attrazioni esercitate dal Sole e dalla Luna. L’influenza maggiore è data dalla maggior massa equatoriale della terra, ma anche altri fattori possono entrare in gioco.
Altre dotazione importanti, per non dire fondamentali, sono quelle di 4 oscillatori, di cui 2 al rubidio e 2 al cesio. Tali orologi atomici sono quanto di più preciso offra la scienza per misurare il tempo, con una stabilità compresa fra 10 13 e 10 14sec. su un giorno. Gli orologi di bordo, così come tutte le 6 orbite, sono costantemente monitorati
dalle stazioni di terra che provvedono ad operare le giuste correzioni qualora se ne presentasse il bisogno.
Il satellite, oltre a fornire un segnale tempo molto preciso grazie ai suoi oscillatori, deve trasmettere segnali di tipo diverso contenenti informazioni per gli utilizzatori a Terra e ricevere e memorizzare le informazioni trasmesse dalla rete di stazioni di controllo.
2.2.2 Control segment
Il segmento di controllo, indicato anche con l’acronimo OCS (Operational Control System), è costituito dall’insieme di stazioni, equispaziate lungo l’equatore, coinvolte nel monitoraggio e nel controllo del sistema GPS (figura 2.3):
una stazione di comando MCS (Master Control Station) situata nella Falcon Air Force Base nei pressi di Colorado Spring;
6 stazioni di monitoraggio MS (Monitor Station); 4 stazioni trasmittenti GA (Ground Antenna).
Le stazioni di monitoraggio ricevono continuamente i segnali emessi da tutti i satelliti. I dati raccolti da ciascuna stazione comprendono il segnale di clock del satellite, la sue correzioni rispetto al tempo universale UTC (Universal Time Coordinate), le effemeridi dei satelliti e vari segnali di stato. Le effemeridi informano il ricevitore sull’esatta posizione del satellite nello spazio, così che il ricevitore possa conoscere perfettamente dove si trova l’origine del segnale che ha ricevuto. Ogni satellite trasmette le proprie effemeridi. Inoltre, ogni satellite trasmette un almanacco, che è un’informazione più generale, rispetto a quella contenuta nelle effemeridi, sulla posizione di tutti i satelliti della costellazione GPS; questo fa sì che il ricevitore sappia sempre dove e quando ricercare i satelliti, nel momento dell’individuazione della posizione.
Figura 2.3 Stazioni di controllo
I dati, una volta raccolti, vengono inviati alla stazione MCS che ha il compito di eseguire tutte le misure necessarie per correggere le informazioni inviate dai satelliti GPS. La MCS effettua una stima quotidiana dell’orbita e dell’offset d’orologio previsti per ciascun satellite nelle 24 ore successive, quindi le orbite previste vengono parametrizzate ed i dati inviati ai satellite, i quali, a loro volta, inserendoli nei dati di comunicazione che diffondono continuamente, li comunicheranno agli utenti durante la giornata successiva.
Tali informazioni, indicate con il nome di broadcast ephemerides (effemeridi trasmesse), pur essendo comunicate dai satelliti in tempo reale, sono il risultato di previsioni effettuate 24 ore prima. Ci sono poi le precise ephemerides (effemeridi precise) che sono calcolate mediante un sofisticato programma di calcolo d’orbita che utilizza i dati raccolti in 8 giorni dalle stazioni di controllo sparse sul globo. Così facendo, si riesce a raggiungere un grado di precisione di circa 2 ordini di grandezza superiore rispetto alle broadcast ephemerides, a scapito di tempi più lunghi sia di elaborazione che di messa a disposizione dei relativi dati. Attualmente diversi enti di ricerca associati all’IGS (International GPS Service for Geodynamics), calcolano e rendono disponibili le Effemeridi Precise con 1 settimana di ritardo.
2.2.3 User segment
Questo segmento non è altro che l’insieme degli utilizzatori finali, siano essi civili o militari. Ogni utente è dotato di un ricevitore, più o meno sofisticato, capace di acquisire i segnali emessi dai satelliti GPS per stimare il posizionamento tridimensionale in tempo reale. Tali ricevitori sono di tipo passivo, per questo motivo il numero degli utenti che può essere servito è illimitato.
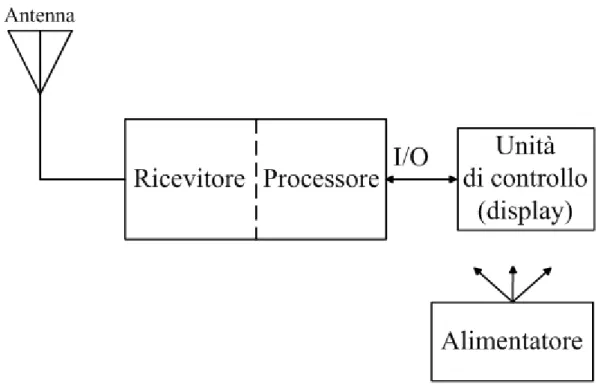
Più in dettaglio la strumentazione per ricevere i segnali GPS è costituita da 5 parti principali (figura 2.4): antenna; ricevitore; processore; dispositivo I/O; alimentatore.
L’antenna ha una polarizzazione circolare destrogira (RHCP, Right Hand Circulary Polarized) ed il suo guadagno varia da circa 2.5dBic1 allo zenith a circa 1dBic per angoli di elevazione di 10°, mentre per angoli inferiori a 10° è negativo.
Il ricevitore deve eseguire una serie di operazioni, tra le quali la prima è quella di testare la presenza dei 4 segnali provenienti dai 4 diversi satelliti eseguendo una misura di correlazione tra i codici PRN (PseudoRandom Noise) associati ai vari satelliti (costruiti all’interno dello stesso ricevitore) e l’informazione ricevuta.
Tutta la serie di operazioni che il ricevitore deve compiere viene controllata e comandata da un processore che può anche ricavare le soluzioni PVT (Position, velocity and time) dalle misurazioni ricevute.
Il dispositivo di I/O non è altro che l’interfaccia tra il ricevitore GPS e l’utente. Il più delle volte si tratta di un display di controllo tramite il quale si possono inserire i dati e sul quale si possono leggere le informazioni di interesse.
Figura 2.4 Componenti principali di un sistema ricevente GPS
L’alimentazione dipende dalle dimensioni e dal tipo di ricevitore e può essere: interna, esterna od una combinazione delle due.
2.3 Caratteristiche dei segnali GPS
Il GPS è un one-way ranging system (sistema a sola andata), ciò vuol dire che i segnali sono trasmessi solo dal satellite (a parte i segnali che il satellite riceve dalla rete di controllo). Rispetto al cosiddetto two-way ranging system (sistema di andata e ritorno) nei sistemi a sola andata il segnale deve contenere molte più informazioni e, quindi, deve essere più complicato.
I satelliti GPS trasmettono due portanti a radiofrequenza: L ed 1 L . Le portanti 2 sono modulate mediante la combinazione di un codice a spettro espanso (una sequenza PRN unica per ogni satellite) con i dati di navigazione. Grazie all’utilizzo del codice PRN i segnali trasmessi dai vari satelliti non interferiscono significativamente tra loro.
In ricezione, dato che le sequenze PRN sono quasi incorrelate tra di loro, i segnali possono essere separati utilizzando una tecnica nota come “accesso multiplo a divisione di
codice” (CDMA, Code Division Multiple Access). Affinché ciò possa avvenire il ricevitore deve essere in grado di replicare le varie sequenze PRN oltre alle frequenze portanti.
2.3.1 Frequenze e modulazioni
Gli oscillatori presenti sui satelliti generano una frequenza fondamentale pari a 0 10.23
f = MHz. La portante L , a 1575,421 MHz, e la portante L , a 1227,602 MHz, sono ottenute dalla frequenza fondamentale mediante moltiplicazione:
1 2 L 1575 42 154 10 23 L 1227 60 120 10 23 MHz MHz MHz MHz = = × = = × . . . . (2.1)
tali frequenze corrispondono alle seguenti lunghezze d’onda:
1 2 0.19 0.24 m m (2.2)
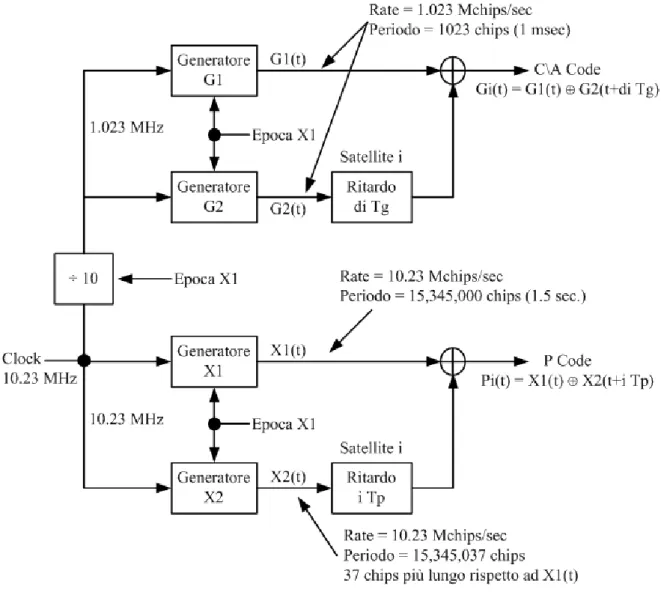
Nella figura 2.5 viene proposto lo schema dei segnali GPS. Le due portanti sono modulate in fase utilizzando tre diversi codici:
il corse/acquisition code (C/A-code), detto anche clear/acquisition code; il precision code (P-code);
i dati di navigazione (D).
I due codici C/A e P consistono in sequenze binarie di natura pseudocasuale (PRN). In particolare il codice C/A è unico per ciascun satellite, dura 1 ms e si compone di 1023 bits. Il chipping rate, cioè la velocità di emissione dei chip, è di 1.023 Mbps; dunque in un secondo vengono emessi 1023000 bit del codice C/A e, di conseguenza, l’intero codice viene ripetuto ogni millisecondo (repetition time). I codici C/A appartengono alla famiglia dei Gold Code, codici pseudocasuali che presentano alcune interessanti caratteristiche. Fissata la lunghezza, 1023 bit, esistono molti codici diversi appartenenti alla famiglia; nel
codice C/A. Questi codici, detti Gold Code, hanno bassa cross-correlazione per cui è facile confrontare i codici C/A ricevuti in un certo istante con quelli presenti nella libreria di ogni ricevitore e determinare da quali satelliti siano stati emessi. Inoltre, ogni Gold Code ha bassa correlazione con le sue copie sfasate e ciò permette ai ricevitori di determinare il tempo impiegato dai segnali a coprire la distanza satellite-ricevitore. Esso serve per la localizzazione grossolana ed è libero per tutti.
Figura 2.5 Struttura del segnale GPS
Il codice P (Precision) è usato in modo analogo al codice C/A, ma ha caratteristiche differenti che permettono prestazioni migliori. Il codice P ha un chipping rate pari a 10.23 Mbps ed è costituito da circa 2 1014bit corrispondenti a 266 giorni, a loro volta partizionati
in 37 segmenti settimanali. Ciascun segmento è assegnato ad un diverso satellite (numero PRN del satellite). Il codice P viene ripetuto ogni settimana. E’ utilizzato per la localizzazione precisa ed è limitato ai soggetti autorizzati dal Governo degli Stati Uniti.
Il messaggio di navigazione (D) è un codice binario a bassa frequenza, infatti: 50
D
f = bps, il periodo vale TD =20 secm e, dunque, fra l’emissione di due chip di D il codice C/A si ripete 20 volte. Il codice D contiene il segnale di clock del satellite, la sue correzioni rispetto al tempo universale UTC, le effemeridi dei satelliti e vari segnali di stato.
In questo modo il sistema GPS può fornire un doppio servizio:
SPS (Standard-Positioning Service), per uso civile, attraverso la ricezione del solo segnale C/A;
PPS (Precise-Positioning Service), per usi militari o speciali, attraverso la ricezione di entrambi i segnali C/A e P.
La portante L viene modulata con un clock a 10.23 MHz dal codice P e dal codice 1 C/A con un clock pari a 1.023 MHz. Il codice PRN viene combinato con i dati per la navigazione, emessi a 50 bps, attraverso una operazione di or esclusivo e il risultato va a modulare la portante L in BPSK. Questo modo di combinare i dati con il codice 1 identificativo del satellite, è detto DSSS (Direct Sequenze Spread Spectrum). Il segnale S1
assume la forma:
(
)
(
)
1 1 1 1 1
S =A P t D t cosP ( ) ( ) 2 f t+ +AC A/ C t D t sin( ) ( ) 2 f t+ (2.3)
dove 1 è la fase iniziale e D t( )= ±1 rappresenta il dato. A eP AC A/ rappresentano
rispettivamente l’ampiezza del codice P e del codice C/A, mentre P t( )= ±1 e C t( )= ±1 sono le rispettive fasi. Il P Y( ) code data è modulato in quadratura rispetto a
/
Sulla portante L non sono mai presenti simultaneamente i codici P e C/A. In 2 genere la combinazione P Y( ) code data è la sola selezionata dal segmento di controllo per questa portante; il segnale S2 è:
(
)
2 2 2
S = A P t D t cosP ( ) ( ) 2 f t+ (2.4)
I lobi principali per entrambi i segnali hanno una ampiezza di 20.46 MHz. Il segnale GPS è dato dalla somma delle due componenti:
1 2
( ) ( ) ( )
GPS
S t =S t +S t (2.5)
Nella tabella 2.1 vengono riassunte le caratteristiche principali della struttura dei due segnali GPS:
PRIORITA’ PRINCIPALE SECONDARIO
Segnale L1 L2 Frequenza portante (Hz) 1575.42 10× 6 1227.60 10× 6 Codici PRN (chips/sec) 6 6 ( ) 10.23 10 / 1.023 10 P Y e C A = × = × 6 6 ( ) 10.23 10 / 1.023 10 P Y o C A = × = × Modulazione dati navigazione (bps) 50 50
Tabella 2.1 Struttura segnale GPS
Attivando la modalità antispoofing (AS) si cripta il P-code per generare il cosiddetto Y-code. Con tale modalità si nega l’accesso al P-code a tutti gli utenti SPS. Entrambi i codici P e C/A, così come le portanti L ed 1 L , sono soggette ad essere criptate 2 per attivare ciò che è definita come "disponibilità selettiva" o SA (Selective Availability). La SA consiste in una perturbazione intenzionale dell’accuratezza dell’orologio ed una
contaminazione dei dati delle effemeridi dei satelliti; si cripta un errore di offset nei dati trasmessi dal satellite riguardanti le effemeridi ed almanacchi. Il risultato é un errore sistematico variabile nel tempo, derivante dalla combinazione degli errori contenuti nella portante di ogni satellite ricevuto. Gli effetti sono degli errori sulle misure di pseudorange. Tali errori possono essere rimossi dagli utenti PPS, ma non da quelli SPS. Questo ha come risultato quello di causare un errore di posizione per gli utenti SPS. Tale restrizione concede solo precisioni orizzontali entro 100 metri reali per il 95% del tempo, mentre gli utenti PPS, che hanno a disposizione algoritmi e cifrari per rimuovere gli errori inseriti, godono della precisione intrinseca del sistema che è pari a circa 20 metri.
Dal 2 Maggio 2000, il disturbo SA, che rendeva volutamente inaccurato il segnale di posizionamento trasmesso in chiaro, è stato rimosso; come conseguenza si è avuto un incremento dell’utilizzo del GPS per applicazioni civili, ad esempio sistemi di guida satellitari per auto.
Nonostante la disattivazione della Selective Availability, permane la necessità di operare in DGPS (Differential GPS), a causa del problema degli errori di multipath, nel ritrovamento di precisione di punti di campionamento in bosco.
Grazie al DGPS, mediante tecniche differenziali e una serie di stazioni terresti, anche con le apparecchiature civili (SPS) si possono ottenere delle precisioni di localizzazione più elevate di quelle garantite dalla ricezione del solo codice C/A.
Le stazioni di riferimento differenziali calcolano e trasmettono ai ricevitori in zona le correzioni da apportare ai loro dati. In molte aree, prevalentemente costiere, sono state installate stazioni radio fisse (radiofari terrestri su onde medie), che emettono il segnale utile alle misure differenziali; ma le radio necessarie per lo scambio delle correzioni sono spesso molto più costose di un ricevitore normale.
2.3.2 Generazione dei codici PRN
La generazione dei codici PRN a sequenza diretta viene ottenuta combinando l’uscita di due generatori di codice. Come si può vedere dalla figura 2.6, l’uscita del primo generatore viene combinata, utilizzando un sommatore modulo 2, all’uscita del secondo. Quest’ultima è opportunamente ritardata perché ad ogni ritardo corrisponde una diversa
sequenza finale e, quindi, ad ogni satellite verrà associata un ritardo diverso e quindi una sequenza univoca.
Figura 2.6 Schema di generazione dei codici PRN nel sistema GPS
Per il C/A-code vengono utilizzati due registri a scorrimento (shift register) di 10 bit, detti G1 e G2, I generatori sono descritti da polinomi della forma 1 i
i
X
+ dove Xi
indica che l’i-esima cella va in ingresso ad un sommatore modulo due, mentre il termine 1 che l’uscita del sommatore viene riportato in ingresso alla prima cella.
Impostando adeguate condizioni iniziali si ottengono codici pseudocasuali di tipo maximum-lenght e cioè di lunghezza N =210 1 1023= chip.
In figura 2.7 possiamo vedere un esempio di generatore, per l’esattezza il G1. Il polinomio che lo descrive è il seguente 3 10
1 X+ +X . Nella tabella 2.2 sono riportati i polinomi generatori e gli stati iniziali dei due codici del GPS.
Figura 2.7 Registro a scorrimento G1
Registro Polinomio generatore Stato iniziale
C/A-code G1 1 X+ 3+X10 1111111111 C/A-code G2 1 X+ 2 +X3 +X6+X8 +X9 +X10 1111111111 P-code X1A 1 X+ 6+X8+X11+X12 001001001000 P-code X1B 1 X+ 1+X2+X5+X8+X9+X10 +X11+X12 010101010100 P-code X2A 1 3 4 5 7 8 9 10 11 12 1 X+ +X +X +X +X +X +X +X +X +X 100100100101 P-code X2B 2 3 4 8 9 12 1 X+ +X +X +X +X +X 010101010100
Tabella 2.2 Stati iniziali dei e polinomi generatori
Per il P-code si utilizzano quattro registri a scorrimento di 12 bit indicati come X1A, X1B, X2A e X2B; la procedimento seguito per ottenere le sequenze finali è diverso rispetto a quello utilizzato il C/A-code. Ad esempio l’uscita del generatore X1 è data dalla combinazione del registro X1A con il registro X1B tramite l’or esclusivo. Analogamente le uscite di X2A e di X2B sono combinate, anche se in modo diverso, per avere X2.
2.3.3 Funzione di autocorrelazione e densita’ spettrale di potenza
Le caratteristiche di autocorrelazione dei codici PRN sono di basilare importanza per il processo di demodulazione; invece, la densità spettrale di potenza dei codici determina la banda di canale richiesta per trasmettere e ricevere i segnali a spettro espanso.
In un ricevitore GPS, durante la fase di ricerca e di tracking, avviene un processo molto simile a quello di autocorrelazione. La funzione di autocorrelazione è definita come:
( )
( ) (
)
1 1 1
R = f t f t+ dt (2.6)
Abbiamo quindi bisogno di una replica del segnale per valutare il valore della funzione di autocorrelazione al variare dello sfasamento ; per =0 abbiamo la massima correlazione.
Per quanto riguarda lo spettro di potenza, esso è una funzione reale e può essere o determinata calcolando la trasformata di Fourier della funzione di autocorrelazione R t :1( )
1( ) 1( ) cos
S = R d (2.7)
oppure derivata dalla trasformata di Fourier del segnale considerato:
2 1( ) 1( )
S =F (2.8)
Poiché molte funzioni del tempo non hanno trasformata di Fourier, si procede partendo dalla funzione di autocorrelazione, dato che può essere ottenuta per ogni funzione del tempo. Infatti, un codice binario casuale non ha la trasformata di Fourier, ma ha la funzione di autocorrelazione, che è molto simile a quella di un impulso rettangolare.
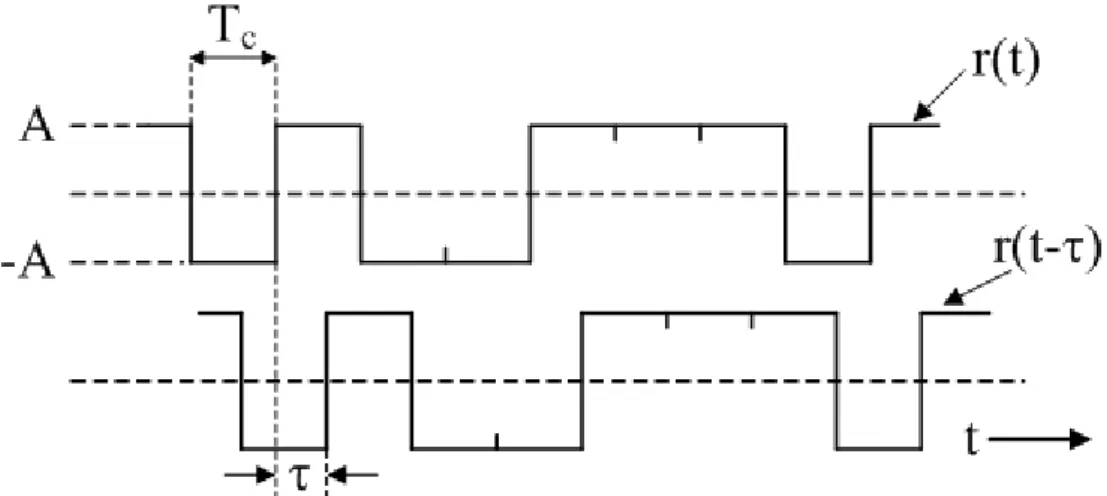
Considerato un codice binario casuale r t( ), con ampiezza ±A e periodo di chip Tc (figura 2.7), la sua funzione di autocorrelazione è (figura 2.8):
Figura 2.7 Codice binario casuale 2(1 ) ( ) 0 c c A per T R T altrove = (2.9)
Figura 2.8 Funzione di autocorrelazione
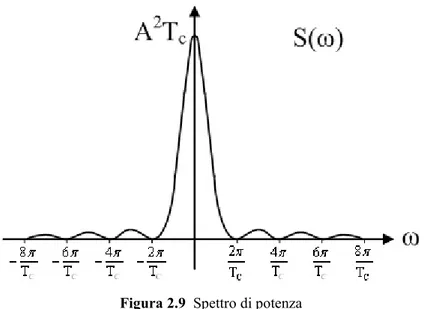
mentre la potenza spettrale, ottenuta dalla trasformata di Fourier della funzione di autocorrelazione, è (figura 2.9): 2 2 sin 2 2 2 ( ) c c c c T T S A T A T sinc T = (2.10)
Figura 2.9 Spettro di potenza
Possiamo notare che la funzione di autocorrelazione e lo spettro di potenza sono uguali, a meno di un fattore di scala T , a quelli di un impulso rettangolare. Come C conseguenza, si ha che il codice è correlato con se stesso in un’unica posizione ed incorrelato con i codici diversi.
I satelliti GPS usano codici che hanno spettro di potenza e funzione di autocorrelazione molto simili a quelli di un codice binario casuale, ma a differenza di quest’ultimo sono: periodici, predicabili e riproducibili.
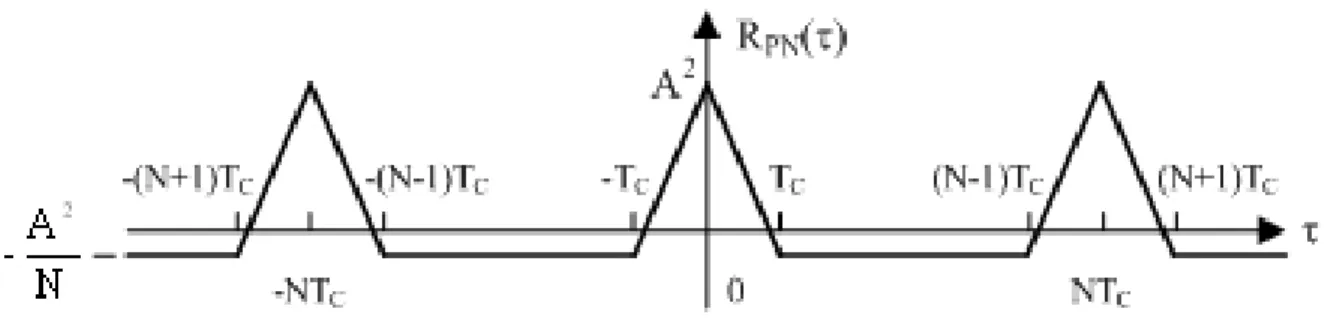
Consideriamo una sequenza PN di ampiezza ±A con periodoNT (c T periodo di c chip). La funzione di autocorrelazione per una sequenza di lunghezza massima, è una serie infinita di funzioni triangolari e può essere espressa come convoluzione tra la (2.9) ed una serie di impulsi (figura 2.10):
(
)
2 2 0 1 ( ) ( ) PN c m A N R R mNT N N + = + = + + (2.11)Figura 2.10 Funzione di autocorrelazione del codice PN
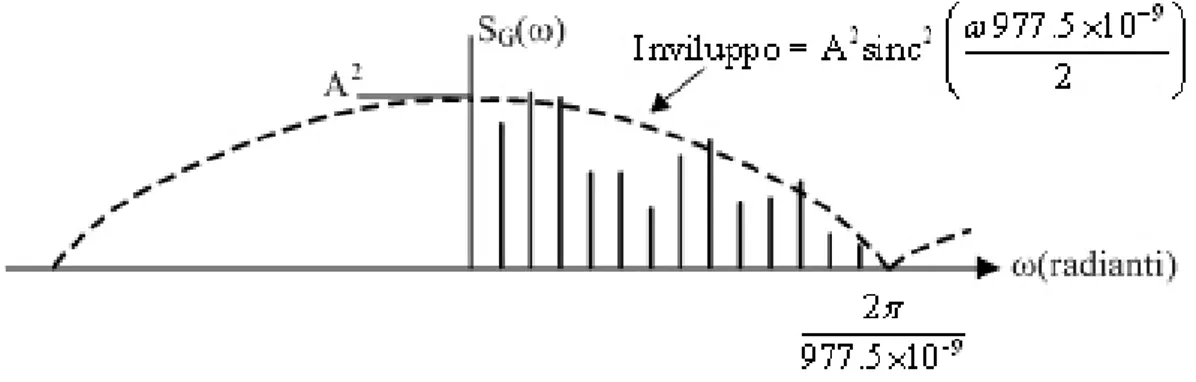
mentre lo spettro di potenza, ricavato dalla trasformata di Fourier della (2.11), risulta essere (figura 2.11):
( )
2( )
(
)
2 2 0 2 1 sin( ) ( ) 1, 2, 3,... PN m c A m m S N sinc N N NT x dove sinc x ed m x = = + + + = = ± ± ± (2.12)Figura 2.11 Spettro di potenza della sequenza PN
Possiamo notare che l’inviluppo dello spettro discreto è uguale, a meno del termine DC e di un fattore di scala T , a quello continuo di una sequenza binaria casuale. c
I codici PRN del GPS hanno funzioni di autocorrelazione e spettri di potenza simili a quelli dei codici PN, ma presentano alcune sottili differenze. La funzione di autocorrelazione di sequenze di lunghezza massima, presenta dei sidelobes quando l’intervallo di integrazione è uno (o più) periodi di codice. In un ricevitore GPS, tale
intervallo è di solito compreso tra 1 e 5 ms ed è, quindi, pari, ad esempio, a 1-5 periodi del codice C/A. Per limitare tali problemi vengono utilizzati, come codici C/A, i Gold codes.
La funzione di autocorrelazione di un codice GPS di tipo C/A è data da:
1 1023
( ) 0 G ( ) G (i i )
1.023 /
G ( ) =i C/A
-TC/A (977,5 sec) C/A
RG t t t d
TC A
t sequenza di codice Gold del satellite i simo dove
chipping period n del codice
= = +
=
(2.13)
Nella figura 2.12, possiamo vedere la funzione di autocorrelazione che presenta una correlazione non nulla negli intervalli tra due impulsi triangolari.
Figura 2.12 Funzione di autocorrelazione di un codice Gold C/A
Queste fluttuazioni nella funzione di autocorrelazione, si traducono in una deviazione delle linee spettrali dall’inviluppo ideale sin( )x
x (figura 2.13). Possiamo anche
notare che alcune linee superano tale inviluppo; ciò le rende vulnerabili alle interferenze con onde continue a RF.
Figura 2.13 Spettro di potenza di un codice Gold C/A
La funzione di autocorrelazione del codice P(Y) è:
CP 12 1 6.1871 10 ( ) 12 0 i( ) (i ) 6.1871 10 ( ) = ( ) -i T (97,8 sec) ( ) RP t P t P t d TCP
P t sequenza di codice P Y del satellite i simo dove
chipping period n del codice P Y ×
= = +
× =
(2.14)
Nonostante il codice P(Y) non sia un codice di lunghezza massima, il suo periodo è così lungo ed il suo chipping rate così veloce, che la sua funzione di autocorrelazione è ideale (figura 2.14).
Figura 2.14 Funzione di autocorrelazione, normalizzata e semplificata, di un codice P(Y),
con tempo in chip
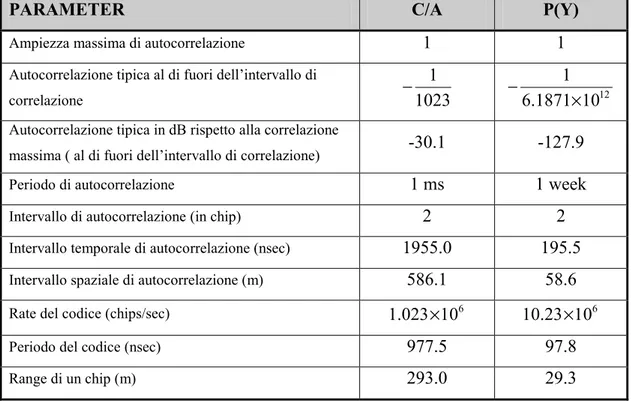
Nella tabella 2.3 sono riportate le caratteristiche delle funzioni di autocorrelazione dei due codici:
PARAMETER C/A P(Y)
Ampiezza massima di autocorrelazione 1 1 Autocorrelazione tipica al di fuori dell’intervallo di
correlazione
1
1023 12
1 6.1871 10× Autocorrelazione tipica in dB rispetto alla correlazione
massima ( al di fuori dell’intervallo di correlazione) -30.1 -127.9
Periodo di autocorrelazione 1 ms 1 week
Intervallo di autocorrelazione (in chip) 2 2
Intervallo temporale di autocorrelazione (nsec) 1955.0 195.5
Intervallo spaziale di autocorrelazione (m) 586.1 58.6 Rate del codice (chips/sec) 1.023 10× 6 10.23 10× 6
Periodo del codice (nsec) 977.5 97.8
Range di un chip (m) 293.0 29.3
Tabella 2.3 Confronto tra le autocorrelazioni dei codici C/A e P(Y)
Si può osservare che il codice P(Y) può essere considerato essenzialmente incorrelato con se stesso (tipicamente -127.9 dB) per tutti gli intervalli al di fuori di quello di correlazione, mentre il codice C/A è solo sufficientemente incorrelato (di solito -30.1 dB).Quando i codici sono combinati con il messaggio dati a 50Hz, si hanno solo effetti impercettibili sulle funzioni di autocorrelazione e sugli spettri di potenza.
Abbiamo già detto che la tecnica di modulazione/demodulazione usata è la CDMA. Tale tecnica richiede che il ricevitore GPS sia capace di sintetizzare una replica del codice PRN (unico per ogni satellite) trasmesso da ogni satellite, e di variarne la fase in modo da correlarlo con quello ricevuto. Ogni codice PRN usato, deve essere cross-correlato al minimo con ogni altro codice per ogni sfasamento possibile all’interno dell’intero periodo del codice.
La funzione di cross-correlazione ideale per i codici GPS è:
( ) ( ) ( ) 0
( ) ( )
Rij PN t PN ti j d
PN ti la sequenza di codice PN per il satellite i simo dove
PN tj la sequenza di codice PN per tutti i satelliti con j i
= + =
= =
In realtà questo è impossibile. Il livello della cross-correlazione di un codice GPS P(Y) con codici dello stesso tipo è circa -127dB rispetto al valore di massima correlazione: di conseguenza si può considerare incorrelato per ogni . Invece, per i codici C/A, in alcune circostanze si possono avere valori di -24dB rispetto al livello massimo; questo può causare una falsa acquisizione.
2.4 Il sistema Galileo
Galileo è un sistema di posizionamento satellitare che nasce e si sviluppa per gli utenti civili, garantendo notevole flessibilità e sfruttabilità commerciale, ma che può anche essere utilizzato militarmente, facendo cessare la dipendenza dagli Usa.
Il suo principio di funzionamento è analogo a quello del sistema GPS: un utente, attraverso la ricezione di almeno quattro segnali radio trasmessi dai satelliti, riuscirà a stabilire con correttezza la propria posizione.
Il sistema sarà compatibile e ridondante rispetto al GPS, adottato oggi dalla gran parte dei produttori di sistemi di posizionamento. Quando Galileo sarà operativo, si potrà decidere di usare, di volta in volta, il più affidabile. Combinando un piccolo ricevitore satellitare ad un telefono cellulare, sarà possibile determinare la posizione esatta con un'approssimazione di un metro; inoltre, grazie agli orologi atomici a bordo, Galileo fornirà un servizio del tempo (Timing Services).
GALILEO offrirà una precisione superiore e costante, grazie in particolare alla struttura della sua costellazione di satelliti e del suo sistema di relè al suolo; una precisione metrica garantita è necessaria per alcune applicazioni: ciò permettere di evitare una collisione all'entrata di un porto o la localizzazione di un veicolo rubato, anche se si trova in un garage.
Avrà un'affidabilità superiore, poiché comporta un "messaggio d'integrità" che informa immediatamente l'utente degli errori che possono apparire ed ha una copertura senza rischi nelle zone difficili come il nord dell'Europa.
Il costo dell'operazione Galileo non è certo irrilevante, si parla di 3.2-3.4 miliardi di euro, ma non è tale da dover far ricorso al contributo diretto dei singoli Paesi dell'Unione Europea. Verrà, infatti, finanziato nell'ambito del bilancio dell'UE con l'importante
oltre agli Stati membri dell'UE anche Svizzera e Norvegia) che si occuperà della progettazione e messa in orbita dei satelliti. La struttura societaria che è stata creata è particolare e prevista dal Trattato di istituzione dell'UE. Si chiama Joint Undertaking. Anche i privati, consorziati e non, o gli Enti pubblici interessati dei singoli Stati, possono partecipare con un contributo minimo di 20 milioni di euro. Molte aziende si sono impegnate per una sottoscrizione contributiva di 200 milioni di euro. I costi di utilizzo del sistema per gli utenti saranno nulli per il servizio base (come per il GPS), mentre sono previsti servizi a pagamento per applicazioni professionali o commerciali che richiedano prestazioni particolari o accessi riservati; infatti, GALILEO proporrà molti livelli di servizio (tabella 2.4):
un servizio di base (detto OS, Open Service), gratuito, per applicazioni e servizi d'interesse generale; diversamente dal GPS offrirà una qualità ed un'affidabilità migliori;
un servizio commerciale (detto CS, Commercial Service) che permetterà lo sviluppo di applicazioni a scopi professionali e che offrirà prestazioni potenziate rispetto al servizio di base, in particolare in termini di garanzia di servizio;
un servizio “vitale” (detto SOL Safety Of Life Service) di altissima qualità ed integrità per applicazioni concernenti la vita umana, come la navigazione aerea o marittima;
un servizio di ricerca e salvataggio (detto SAR, Search and Rescue Service) destinato a migliorare sensibilmente i sistemi esistenti di assistenza in caso di emergenza e di salvataggio;
un servizio governativo (detto PRS, Public Regulated Service) criptato e resistente ad oscuramenti ed interferenze. E’ riservato soprattutto alle necessità delle istituzioni pubbliche in materia di protezione civile, sicurezza nazionale e rispetto del diritto che richiedono una grande continuità. Permetterà lo sviluppo di applicazioni protette nell’Unione Europea e potrà essere un importante strumento per migliorare i mezzi usati dall’UE per lottare contro le esportazioni illecite e l’immigrazione clandestina.
GALILEO Global Services Open Services Commercial Services Safety of Life Services Public Regulated Services
Copertura Globale Globale Globale Globale
Precisione di posizionamento - orizzontale (H) - verticale (V) 15 m H – 35 m V (single frequency) 4 m H – 8 m V (dual frequency) 4 m H – 8 m V (dual frequency) 15 m H – 35 m V (single frequency) 6.5 m H – 12 m V (dual frequency) Precisione di
timing 30 nsec 30 nsec 30 nsec
Disponibilità 99.5 % 99.5 % 99.5 % 99.5 %
Integrità NO NO SI SI
Limite d’allarme 12 m H – 20 m V 20 m H – 35 m V
Tempo d’allarme 6 sec 10 sec
Rischio di integrità 3.5 10 /150sec× 7 3.5 10 /150sec× 7 Rischio di
continuità 1.0 10 /15sec× 5 1.0 10 /15sec× 5
Tipologia di accesso Libero Controllato (Ranging Code, Nav. Data Mess.) Controllato (Nav. Data Mess.)
Controllato (Ranging Code, Nav. Data Mess.) Certificazione e garanzia del servizio NO Garanzia del servizio possibile SI SI
Tabella 2.4 Prestazione dei servizi di navigazione
2.5 Le sezioni del sistema Galileo
Il sistema Galileo sarà composto da due sezioni:Galileo space segment Galileo ground segment
2.5.1 Galileo Space Segment
La sezione spaziale (GSS) prevede 30 satelliti MEO (Medium Earth Orbit), di cui 27 operativi e 3 di riserva, per costituire quella che viene definita una Walker Constellation. E’ stata scelta tale configurazione per raggiungere i massimi livelli di efficienza: ad esempio, in caso di malfunzionamento di un satellite, si potrà procedere rapidamente al suo rimpiazzo, senza che tale operazione venga fatta da Terra, il che avverrebbe in tempi abbastanza lunghi.
I satelliti orbiteranno attorno alla Terra ad un’altezza di 23616 Km dalla superficie e saranno distribuiti su tre orbite, ognuna delle quali è inclinata di 56° rispetto al piano dell’equatore (figura 2.15). Il primo dovrà essere lanciato durante il secondo semestre del 2005, in modo da assicurare le frequenze riservate per il sistema Galileo con l`Unione Internazionale delle Telecomunicazioni e i segnali dovranno essere inviati entro giugno 2006 al massimo, in modo da mantenere la priorità assegnata quando furono richieste le frequenze.
Nella tabella 2.5 sono riassunte alcune delle caratteristiche principali dei satelliti.
PARAMETRI
VALORI
Massa al lancio 700 Kg Consumo di potenza 1.6KW Dimensioni: -corpo principale -lunghezza massima (2.7 1.2 1.1) m× × 13mVita media 12 anni
TT&C (Tracking,Telemetry & Command) S-band
Tabella 2.5 Caratteristiche principali dei satelliti GALILEO
Le comunicazioni saranno realizzate attraverso due antenne omnidirezionali con polarizzazione RHCP. I collegamenti per la telemetria avvengono attraverso un trasponder trasmissione/ricezione che opera in banda S, con una singola portante uplink modulata
BPSK/PM (2034.747Mhz) e una singola portante downlink modulata BPSK/PM (2209.68Mhz).
Tutti i satelliti operativi trasmetteranno sulle stesse bande di frequenza e, per selezionare i segnali in ricezione, sarà utilizzato il CDMA. I satelliti, oltre a fornire un servizio di timing, devono trasmette i segnali di navigazione; questi vengono generati, in banda base, attraverso il NSP (Navigation Signal Processor) che usa come ingressi sia i dati di navigazione trasmessi dal GCS (Galileo Control System) in banda S, che i codici PRN ed il riferimento temporale derivato dal clock atomico attivo di bordo. I satelliti, per di più, avranno anche la possibilità di diffondere, secondo un ordine di priorità, i messaggi d’integrità forniti in pacchetti ricevuti dall’EIDS (European Integrity Determination System) o dal NEIDS (Non-European Integrity Determination System). I pacchetti ricevuti a bordo del satellite sono incorporati dentro le trame del segnale di navigazione, senza subire nessuna manipolazione, e trasmessi agli utenti in tempo reale.
Figura 2.15 Orbita dei satelliti GALILEO
2.5.2 Galileo Ground Segment
Le funzioni che dovrà svolgere la sezione terrestre sono: il controllo dei satelliti ed il controllo missione. Il controllo missione prevederà tutta la serie di operazioni necessarie per determinare l’orbita dei satelliti, per il monitoraggio del timing, per la determinazione e
diffusione, attraverso i satelliti, delle informazioni d’integrità. Il controllo ed il monitoraggio dei satelliti avverranno attraverso le stazioni TT&C.
La sezione terrestre può essere divisa in tre parti principali(figura 2.16): centro di controllo Galileo;
stazioni remote; rete di comunicazioni. SCF (MCS) SCF (MCS) Constellation Man. & Satellite Control
M&C of Ground Assets
L-Band Signal (incl. Status bytes)
S-Band TC, TM and Ranging C-Band
Mission Up-Links
GACF GACF
Ground Mission System (MCS) Ground Control System (GCS)
TT&C x5 TT&C TT&C x5 ULSULS GSSGSS MCF MCF OSPFOSPF IPF IPF PTF PTF SPF SPF x10 x20
Figura 2.16 Galileo Control System
Il centro di controllo, GCC (Galileo Control Centre), sarà il cuore del sistema GCS (Ground Control System) ed includerà tutte le funzioni di controllo ed elaborazione. Il GCC, oltre a provvedere alla generazione dei dati di navigazione e del GST (Galileo System Time) in relazione al TAI (Temps Automatiche International) ed al UTC, controllerà anche le orbite e lo stato dei satelliti, come pure il servizio fornito da questi.
I centri di controllo saranno due, ridondanti e geograficamente separati, per garantire il funzionamento del sistema in caso di malfunzionamento di uno dei due.
Le stazioni remote raccoglieranno le informazioni inviate dai satelliti GALILEO così come altre informazioni riguardanti le condizioni metereologiche ed ambientali. Più precisamente, questa parte della sezione terrestre, sarà costituita da: 5 S-band TT&C Station, dotate di una sola antenna S-band per sito, che si occuperanno di ricevere e trasmettere i dati per la telemetria ed il controllo dei satelliti; 10 C-band Mission Up-linl Station ULS(Up-link Stations), dotate al massimo di 3 antenne per stazione, che trasmetteranno dati specifici relativi alla missione GALILEO; 29 Galileo Sensor Station (GSS), stazioni per la ricezione e demodulazione dei segnali trasmessi dai satelliti sulle quattro portanti. Tutte le informazioni ricevute saranno poi inviate al GCC per essere elaborate.
Gli elementi che fanno parte del GCC saranno connessi attraverso una LAN (Local Area Network), mentre lo stesso GCC sarà connesso alle stazioni remote tramite una geographical link basata su una serie di ripetitori e tecniche di comunicazioni VSAT.
E’ stato anche previsto un sistema di protezione per difendere le comunicazioni GALILEO da eventuali minacce esterne.
2.6 Caratteristiche dei segnali Galileo
I satelliti GALILEO trasmettono 3 diverse portanti cui corrispondono 3 bande diverse, corrispondenti alle omonime portanti, che sono denominate rispettivamente con
5
E , E e6 E2 L1 E1 (indicata anche come L1); inoltre, sarà prevista anche una quarta banda (una banda stretta), L , dedicata esclusivamente alla ricezione del segnale per il 6 servizio di emergenza SAR. Alcune di queste bande sono parzialmente sovrapposte a quelle del GPS e ciò per garantire l’interoperabilità tra i due sistemi. Nella tabella 2.6 sono riassunti i dati principali che riguardano i segnali GALILEO.
La portante, il codice ed la modulazione sono scelti secondo il tipo di servizio richiesto. Le tecniche utilizzate per trasmettere i dati di navigazione variano a seconda della portante; tale la scelta è dettata da una serie di condizioni tra cui l’ottimizzazione delle prestazioni, la massimizzazione dell’efficienza energetica e la minimizzazione delle interferenze.
BANDA PORTANTE PORTANTE (MHz) LARGHEZZA DI BANDA (MHz) 5 E 5 E f 1191.795 TBD[ 71.61 / 92.07 ] 6 E 6 E f 1278.75 40 1 L L1 1575.42 40 6 L / / 0,2
Tabella 2.6 Frequenze e bande dei segnali GALILEO
In totale, GALILEO sarà in grado di trasmettere 10 diversi segnali di navigazione, con polarizzazione RHCP, nei range di frequenze: 1164-1215MHz (E ), 1260-13005 MHz
(E6) e 1559-1592MHz (E2 L1 E1). Sei segnali, considerando i tre canali pilota (solo
codice senza modulazione dati), disponibili per tutti gli utenti GALILEO, sulle frequenze 5
E ed L1 per i servizi OS e SOL. Due segnali, considerando un canale pilota, con codici criptati sulla frequenza E per il servizio CS. Due segnali, uno sulla banda 6 E ed uno sulla 6
1
L , con codice criptato per il servizio PRS.
In figura 2.17, oltre alle portanti ed alle bande dei segnali GALILEO, sono indicati anche le bande del GPS e del sistema russo GLONASS (parzialmente funzionante) ed è quindi possibile vedere le sovrapposizione di banda tra i due sistemi.
Tutti i satelliti che condividono le stesse frequenze utilizzeranno la tecnica di accesso multiplo CDMA, che è compatibile con il GPS. Per generare i dati trasmessi verrà utilizzato un codificatore convoluzionale con rate pari ad 1/ 2.
Figura 2.17 Scenario segnali GALILEO, GPS e GLONASS
La tabella 2.7 riassume il significato dei simboli che saranno utilizzati per descrivere le varie modulazioni.
SIMBOLI
SIGNIFICATO
|
|i L imodulo L
D
i parte intera di i/D
X Y
D durata (in chip) del messaggio di navigazione del canale Y sulla
portante X
X
P potenza del segnale sulla portante X
X
k Y c
,
k-esimo chip della sequenza di codice del canale Y sulla portante X
X Y
L lunghezza (in chip) della sequenza di codice del canale Y sulla portante X
X k Y
d , k-esimo chip del messaggio di navigazione del canale Y sulla portante X
) (t
rectT impulso rettangolare di ampiezza unitaria e durata T
X c X
c R
T =1/ durata (in secondi) del chip di codice
2.6.1 Modulazione della portante E5
In questo caso abbiamo un solo segnale a banda larga generato mediante una modulazione ottenuta modificando la BOC (Binary Offset Coding) cioè la AltBOC(10,5)2 con sottoportante quadrata a 15.345 MHz, mentre il 10 si riferisce al chip rate pari a 10.23
/
Mchip s dei quattro segnali BPSK utilizzati. Con questo tipo di modulazione i due
segnali E e E5a 5b sono combinati in un segnale composto ad inviluppo costante che può essere immesso su un canale a banda molto ampia. Usando congiuntamente le due bande
5a 5b
E e E si potrà raggiungere una notevole precisione nella determinazione della posizione in caso di basso multipath. Il segnale è poi amplificato per mezzo di un amplificatore a larga banda prima di essere trasmesso alla frequenza di 1191,795MHz (figura 2.18).
Figura 2.18 Schema di modulazione della portante E5
La figura mostra come sui due canali in fase saranno trasmessi i messaggi di navigazione: F/NAV (Free NAVigation Msg), che sarà il messaggio di navigazione dell’Open Service, ed I/NAV (Integrity NAVigation Msg) relativo al servizio SoL. Nella figura sono rappresentati anche gli stadi per l’inserzione dei bit di coda (tail bits) e della parola unica (Unique Word) utilizzati per la sincronizzazione di frame. Il Frame completo del messaggio di navigazione sarà composto da tre parti, denominate rispettivamente Start Word, Data Block e Tail Bits. La parola iniziale Start Word servirà per il sincronismo e sarà composta da un numero di bits ancora da stabilire, probabilmente12. I bits di coda Tail Bits saranno impostati tutti sul valore zero; il loro numero è ancora da stabilire,
probabilmente saranno anch’essi 12. Il messaggio di navigazione sarà poi combinato con il codice di ranging. Sui canali in quadratura avremo solo codice. I quattro segnali, considerando i due canali in fase ed i due in quadratura, avranno la seguente espressione:
(
)
{
}
(
)
{
}
(
)
{
}
5 5 5 5 5 5 5 5 5 5 5 5 2 , , 5 5 4 , 5 5 5 1 , , 5 3 , 5 ( ) 5 ( ) 5 ( ) 5 ( ) E a E a E a LI DI E a E a L Q E b E b E b LI DI E b L Q i E a E a E a c I i I i T i i E a E a c Q i T i i E b E b E b c I i I i T i E b Q i E aI e t c d rect t iT E aQ e t c rect t iT E bI e t c d rect t iT E aQ e t c r =+ ! = =+ = =+ ! = = = = ={
5(
)
}
5 E b i E b c T i ect t iT =+ = (2.16)La sequenza di spreading applicata ai canali sarà composta da E5X 10230
X
L = chips,
e sarà caratterizzata da un Code Rate E5X 10.23 /
ch
R = Mchips s. Tutti i codici utilizzati
saranno indipendenti, ma sincronizzati. L’impulso scelto per il singolo chip avrà una forma rettangolare con ampiezza unitaria e durata E5 97.7
c T " ns (figura 2.19). 2.0 1.5 1.0 0.5 0.0 gNR Z (t ) 500 450 400 350 300 250 200 150 100 50 0 t (ns) E5 carrier 10.23 Mchip/s Tc = 97.7 ns Tc = 97.7 ns
Il Data Rate sul canale I sarà diverso per i due segnali, più precisamente: 5a 50
E s I
R, = simboli s/ e Rs EI, 5b =250simboli s/ . Per quanto riguarda la potenza sembra che
non dovrebbero esserci sbilanciamenti tra i quattro canali, 25% per ognuno.
L’espressione del segnale a banda larga ottenuto utilizzando la AltBOC(15,10)è:
1 1 1 2 3 123 2 2 1 3 4 134 5 5 3 3 1 2 4 124 4 4 2 3 4 234 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 ( ) ( ) ( ) ( ) ( ) ( ) E E e t sc t e t e t e t sc t e t sc t e t e t e t sc t P s t e t sc t e t e t e t sc t e t sc t e t e t e t sc t + + # $ ! + +! = ! + + ! + (2.17)
dove ( )e t sono i quattro segnali visti e i sc t rappresentano le sottoportanti complesse. Di i( ) seguito si riporta solo l’espressione di sc t , mentre per le altre si rimanda 1( ) all’APPENDICE B:
[
]
[
]
(
)
(
)
1 1 1 ( ) (2 ) (2 ) 1 2 2 2 2 (2 ) 1 (2 ) 4 4 4 4 s s s ssc t sign cos f t j sign sin f t j
sign sin f t j sign sin f t
= + + +
# + $+ + # $
! !
(2.18)
L’utilizzo di tale metodo permette una semplificazione dei sottosistemi comprendenti il generatore in banda base e l’amplificatore di potenza, nonchè un’ottimizzazione del ricevitore a terra. Infatti, un un segnale ad inviluppo costante, come quello ottenibile con la AltBOC, permette di limitare le distorsioni introdotte dalle non linearità dell’HPA (High Power Amplifier).
2.6.2 Modulazione della portante E6
Sulla portante E6 avremo tre canali: A, B e C. Sui canali B e C sarà utilizzata una modulazione BPSK, mentre sul canale A avremo una modulazione BOC(10,5), quindi con sottoportante pari a 10.23MHz. La tecnica di multiplazione scelta è la CASM (Coherent Adptative Subcarrier Modulation), che consente di ottenere un segnale ad inviluppo
Figura 2.20 Schema di modulazione della portante E6
Sui canali A e B verranno trasmessi rispettivamente i messaggi di navigazione G/NAV (Govermental NAVigation Msg), relativo al servizio PRS, e C/NAV (Commercial NAVigation Msg) per il servizio CS. Dopo l’inserzione del bit di coda e della parola unica i messaggi saranno combinati con il codice di ranging. Il segnale sul canale C è costituito dal solo codice. Avremo in definitiva i tre segnali:
(
)
(10,5) 6 6 , 6 6 6 6 6 , , , 6 , 2 ( ) E E c A D A E i BOC E E E E A A i A i T c A E i c A n te t c d rect t i T sign sin
T =+ ! = ' # $ ! = ( !)
(
)
{
6 6}
, 6 6 6 6 ( ) , , E E , c B D B i E E E E B B i B i T c B i e t =+ c d ! rect t iT = = (2.19)(
)
{
6}
, 6 6 6 ( ) , E , c C i E E E C C i T c C i e t =+ c rect t iT = =Le sequenze di spreading applicate ai canali A, B e C saranno indipendenti, ma sincronizzate. La sequenza applicata al canale A sarà non periodica; per il canale B sarà impiegata una sequenza di lunghezza pari a E6 5115
B
L = chips, mentre per C sarà di
6 10230 E
C
L = chips.
Il Code Rate per il canale A è pari a 6
, 5.115 /
E ch A
R = Mchip s e, quindi, la durata di un chip risulta 6
195.5
E A
T " ns. Su A, come già detto, verrà utilizzata una modulazione di tipoBOC(10,5): i chip vanno a modulare una sotto-portante (squadrata) con frequenza
alla durata dell’impulso NRZ di figura 2.19. La banda del lobo principale dell’impulso di figura 2.7 è pari a 5.115 4 20.46 MHz× = , e non 40.92 MHz come sarebbe se la durata dell’impulso fosse 97.7 ns; quindi, il lobo principale dell’impulso (2sp) passa quasi interamente attraverso la banda a -3dB del filtro di trasmissione (20MHz). I canali B e C della portante E6 hanno un Code Rate, ancora, di 5.115 Mchip/s e vengono impiegati impulsi NRZ. La banda del lobo principale di questi impulsi è dunque 5.115MHz. Il Data Rate sul canale B è E6 1000
s B
R , = simboli s/ , mentre su A è pari a Rs AE,6 =100simboli s/ .
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 g4S P (t ) 500 450 400 350 300 250 200 150 100 50 0 t (ns) E6 , L1 carriers 5.115 Mchip/s Tc = 195.5 ns Tc = 195.5 ns Sub-carrier f = 10.23 MHz chip value sub-carrier impulse shape
Figura 2.21 Durata dell’impulso 2sp
L’utilizzo del tipo di multiplazione CASM permette di ottenere un segnale ad inviluppo costante. L’espressione del segnale in banda passante è:
( )
( )
(
( )
)
( )
(
( )
)
6 2 1 1 cos 2 0 2 2 2 2 0
E S S
s t = P s t f t m+ t P s t sen f t m+ t (2.20)
dove: S
( )
t = S(
s t1( ) ( ) ( )
,s t2 ,s t3)
, S*{
+1, 1}
, f è la frequenza portante ed m è0 l’indice di modulazione. Dopo opportuni passaggi possiamo scrivere la (2.20) come:( )
( )
(
)
( )
(
)
( )
( )
( ) ( )
( )
(
)
( )
( )
( ) ( )
( )
(
)
6 0 0 1 1 2 2 0 2 2 1 1 0 cos 2 2 2 cos 2 cos 2 2 cos 2 2 E I Q S S s t s t f t s t sen f t P s t m P s t t sen m f t P s t m P s t t sen m sen f t = = # $ = + # + $ (2.21)L’inviluppo del segnale sE6
( )
t è dato da:( )
(
( )
( )
)
(
( )
( )
)
( )
( )
( )
2 2 2 2 1 2 2 2 2 1 2 1 1 2 2 cos I Q S P t s t s t s t s t m t sen m P P P const = + = + # + $= + = = (2.22)otteniamo quindi un segnale ad inviluppo costante.
Il segnale (2.21) può essere visto anche come la combinazione di 4 diversi segnali:
( )
( )
( )
(
)
( )
( )
(
)
6 1 3 cos 2 0 2 4 2 0
E
s t =#u t u t $ f t #u t +u t $ sen f t (2.23)
dove il significato di ( )u tx è immediato se confrontiamo le due espressioni. Imponendo la
condizione u t3
( )
=s t3( )
, tenendo conto che per il caso considerato vale( )
2 1 i s t = +i,otteniamo:( )
2( ) ( )
3 S t =s t s t (2.24)che sostituito ci dà le seguenti espressioni per u t3
( )
ed u t4( )
:( )
( )
( )
( )
( ) ( ) ( )
( )
3 2 3 4 1 1 2 3 2 2 u t P s t sen m u t P s t s t s t sen m = = (2.25)( )
( )
( )
( )
2 1 1 2 2 2 2 3 2 2 4 1 cos cos u u u u P P m P P m P P sen m P P sen m = = = = (2.26)Abbiamo quindi la comparsa di un segnale di intermodulazione (IM) dato dal prodotto dei tre segnali A, B e C. Poiché la componente di potenza associata al termine IM è considerata una perdita, va minimizzata. Ciò si ottiene scegliendo opportunamente i parametri della CASM, ed il minimo si ottiene per valori riportati nella tabella 2.8.
u1,u2,u3 Pu1:Pu2:Pu3 m sin(m) cos(m) Pu1/ P Pu2/ P Pu3/ P Pu4/ P , ,
B A C
s s s 1 1 1
4: :2 4 0.6155 1/ 3 2 / 3 2/9 4/9 2/9 1/9
Tabella 2.8 Parametri della modulazione CASM
L’ espressione in banda base per il segnale complessivo di E6 sarà:
( )
{
( )
6( )
( )
( )
( )
( )
}
6 6 6 6 6 6 6 1 2 2 2 2 3 E C E E E B E A E A E B E C s t = P # e t t $+ j e# t +e t e t e t $ (2.27)dove PE6 è la potenza media del segnale sE6
( )
t , mentre in figura 2.22 è raffigurato lo2.6.3 Modulazione della portante L1
Così come il segnale E , il segnale 6 L1 è ottenuto utilizzando una multiplazione CASM (i parametri validi da utilizzare sono gli stessi della E6 riportati in tabella 2.8). Anche in questo caso abbiamo i tre canali A, B e C (figura 2.23).
Figura 2.23 Schema di modulazione della portante L1
Sui canali B e C sarà utilizzata una modulazioneBOC(2, 2)3, mentre sul canale A avremo una modulazione BOC(10,5). Sui canali A e B saranno trasmessi rispettivamente i messaggi di navigazione G/NAV e I/NAV, mentre sul canale C ci sarà solo codice. I tre segnali ottenuti sono espressi dalla (2.28):
(
)
(
)
(10,5) 1 1 , ( 2,2 ) 1 1 , 1 1 1 1 1 , , , 1 , 1 1 1 1 1 , , , 1 , 2 ( ) 2 ( ) L L DA c A L L DB c B L i BOC L L L L A A i A i T c A L i c A L BOC L L L L B B i B i T c B L c B n te t c d rect t i T sign sin
T
n t
e t c d rect t i T sign sin
T =+ ! = ! ' # $ ! = ( !) # =
(
)
( 2,2) 1 , 1 1 1 1 , , 1 , 2 ( ) L c C i i L i BOC L L L C C i T c C L i c C n te t c rect t i T sign sin
T =+ = =+ = ' $ !( !) ' # $ ! = ( !) (2.28)
Il Code Rate per il canale A è pari a 6
, 5.115 /
E ch A
R = Mchip s, mentre per i canali B e C è pari a 1
, , 2.046 /
L ch B C
R = Mchip s per una durata di un chip pari a 1
, 488.7
L B C
T " ns (figura 2.24). Il Data Rate sul canale A è L1 100
s A
R, = simboli s/ , mentre su B è pari a
1 250 L s B R, = simboli s/ . -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 g2S P (t ) 500 450 400 350 300 250 200 150 100 50 0 t (ns) L1 carrier 2.046 Mchip/s Tc = 488.7 ns Tc = 488.7 ns Sub-carrier f = 2.046 MHz chip value sub-carrier impulse shape
Figura 2.24 Durata dell’impulso
Si può notare che la banda del lobo principale di questi impulsi è pari a 2.046 2 4.092 MHz× = , che rientra nella banda di 16.368MHz del filtro di trasmissione per la portante L1.
Nella tabella 2.9 sono riassunti tutti i parametri dei segnali GALILEO. L’ultima colonna della tabella si riferisce al livello minimo di potenza ricevuta a terra da un ricevitore equipaggiato di un’antenna con polarizzazione RHCP, con guadagno unitario e per un angolo di elevazione di 10° (escludendo l’oscuramento del segnale ed altri effetti di propagazione).
Segnale Canale Tipo di modulazione Chip rate (Mchip/s) Data rate (simboli/s) Bilancio di potenza Livello minimo di potenza ricevuto (elevazione 10°) I
E5a
BPSK (10) 10.23 50 25% -158 dBW QE5a
BPSK (10) 10.23 pilota 25% -158 dBW IE5b
BPSK (10) 10.23 250 25% -158 dBW E5 QE5b
BPSK (10) 10.23 pilota 25% -158 dBW AE6
BOC (10,5) 5.115 100 4/9 -155 dBW BE6
BPSK (5) 5.115 1000 2/9 -158 dBW E6 CE6
BPSK (5) 5.115 pilota 2/9 -158 dBW AL1
BOC (10,5) 5.115 100 4/9 -155 dBW BL1
BOC (2,2) 2.046 250 2/9 -158 dBW L1 CL1
BOC (2,2) 2.046 pilota 2/9 -158 dBWTabella 2.9 Parametri dei segnali GALILEO
2.6.4 I codici del sistema Galileo
La scelta delle sequenze di codice PRN da utilizzare per i segnali di navigazione riveste una notevole importanza, in quanto definisce importanti proprietà del sistema. I parametri da definire sono molteplici tra cui: la lunghezza del codice, la relazione con il data rate, le proprietà di autocorrelazione e cross-correlazione delle sequenze, il tempo di acquisizione a freddo (cold-start acquisition time); un insieme valido di codici deve garantire la protezione contro le interferenze e minimizzare il tempo di acquisizione.
Le sequenze di codice dovrebbero essere create con generatori shift-register posti sui satelliti.
I ranging codes sono ottenuti modulando una sequenza principale di breve durata mediante una sequenza secondaria più lunga (figura 2.25). Il codice che si ottiene ha una durata pari a quella del codice secondario.
Figura 2.25 Generazione dei codici
per i canali senza dati dovrebbe essere fissata in 100 ms, mentre per quelli che trasportano informazioni sarà variabile. Nella tabella 2.10 sono illustrate le principali caratteristiche dei codici.
Per quanto riguarda il tempo di acquisizione cold-start bisogna sottolineare che è fortemente dipendente dal tipo di ricevitore; comunque, in genere, si prevede che sia di 30-50s per semplici ricevitori di segnali E e5 E2 L1 E1, e di 30s per ricevitori di servizi CS su E .6
Canale Tipo di dati Durata della
sequenza del codice Lunghezza del codice primario Lunghezza del codice secondario I
E5a
OS 20ms 10230 20 (CS20b) QE5a
no data 100ms 10230 100 (CS100b) IE5b
OS/CS/SoL 4ms 10230 4 (CS4a) QE5b
no data 100ms 10230 100 (CS100d) AE6
PRS TBD Classified data BE6
CS 1ms 5115 - CE6
no data 100ms 10230 50 (CS50a) AL1
PRS TBD Classified data BL1
OS/CS/SoL 4ms 8184 - CL1
no data 100ms 8184 25 (CS25a)2.7 Compatibilita’ ed interoperabilita’ tra i due sistemi
Il sistema GALILEO è stato progettato scegliendo: tempo4, geodesia5e segnali che garantiscano la compatibilità e l’interoperabilità con il sistema GPS e con sue future estensioni (Il GPS IIF/III fornirà segnali a banda larga su 3 frequenze civili (open): un segnale L centrato sulla frequenza 1176.55 MHz5 ad elevato chipping rate e due segnali a basso chipping rate L1, con portante 1575.42MHz, ed L2 con frequenza 1227.60MHz(figura ).
Figura 2.25 Segnali del futuro sistema GPS
La compatibilità deve assicurare che non ci siano reciproche degradazioni di servizio, mentre l’interoperabilità deve far si che l’uso congiunto dei sistemi aumenti la precisione, l’integrità, l’affidabilità e la disponibilità del servizio.
L’interoperabilità è realizzata mediante la sovrapposizione parziale in frequenza utilizzando segnali differenti e sequenze di codice diverse. La scelta della modulazione, per quelle bande dove potrebbe verificarsi l'interferenza, sembra essere quella della BOC. La separazione spettrale dei segnali GALILEO E GPS, su L1, verrà ottenuta utilizzando differenti schemi di modulazione: GALILEO utilizzerà la modulazione BOC(2, 2) per il
canale B aperto e la modulazione BOC(10,5) per il canale A criptato, mentre il GPS, che attualmente utilizza la BPSK, adotterà la BOC f f
(
S, C)
, ovviamente con diversi parametriS
f e f .C
Un vantaggio pratico della sovrapposizione delle bande è la possibilità di progettare un ricevitore semplice, e quindi di basso costo, in grado di utilizzare congiuntamente le informazioni ricevute da entrambi i sistemi.
La sovrapposizione delle bande provocherà, però, una inevitabile interferenza di un sistema sull’altro, detta appunto inter-system interference che tenderà a ridurre il livello di interoperabilità tra GALILEO e GPS; questa andrà a sommarsi, in ciascuno dei due sistemi, con l’interferenza che si genera internamente, detta per questo intra-system interference. La somma dei due tipi di interferenza determina le prestazioni del ricevitore.
La degradazione del rapporto segnale-rumore sul segnale GPS, dovuta alla modulazione BOC(2, 2) di GALILEO, non sarà mai maggiore di 0,2 dB in qualsiasi luogo e ad ogni istante. Il valore massimo di tale degradazione è una funzione della posizione geografica sulla superficie terrestre. La massima intra-system interference per un segnale GPS C/A risulta essere inferiore ai 2,7 dB, e ,quindi, sempre più grande della inter-system interference. Un aspetto interessante è che i valori massimi relativi alle due interferenze non potranno essere registrati nello stesso momento; anzi, con buona approssimazione, quando una interferenza sarà massima, l’altra sarà attorno al proprio valore minimo.
Nella tabella 2.11 sono riportati i range di variazione stimati per la inter-system interference sulle bande L1 ed E5a/L5; si può notare come le interferenze maggiori siano su E5a/L5.
Banda Interferenza causata dal GPS su
Galileo
Interferenza causata da Galileo sul GPS
L1 0.03 dB / 0.09 dB 0.05 dB / 0.2 dB
E5a / L5 0.5 dB / 0.8 dB 0.2 dB / 0.4 dB