UNIVERSITÀ DI PISA
Facoltà di Ingegneria
Corso di Laurea Specialistica in Ingegneria Meccanica
Tesi di laurea
Candidato:
Vincenzo Pinto
Relatori:
Prof. Marco Beghini
Prof. Leonardo Bertini
Dott. Ing. Ciro Santus
ANALISI DEGLI EFFETTI DI BORDO PER
INGRANAGGI CILINDRICI
Sessione di Laurea del 28/10/2004
Archivio tesi Corso di Laurea Specialistica in Ingegneria Meccanica nn/aa Anno accademico 2003/2004
SOMMARIO
Il presente lavoro di tesi, svolto in collaborazione con Avio Propulsione Aerospaziale S.p.A., consiste nell’analisi e comprensione degli effetti di bordo presenti durante l’ingranamento tra coppie di ruote dentate cilindriche con riferimento particolare per quelle a denti dritti. Questo fenomeno è attualmente poco considerato perché la quasi totalità degli ingranaggi possiede una bombatura sul fianco del dente che impedisce il verificarsi della condizione di contatto completo, inoltre la normativa in materia prevede l’uso di fattori sperimentali per la progettazione.
In questa trattazione sono esaminati gli effetti di bordo in tre situazioni differenti: • ingranamento tra ruote con superfici libere allineate dello stesso materiale; • ingranamento tra ruote con superfici libere non allineate;
• ingranamento tra ruote con superfici libere non allineate in presenza di un raccordo d’estremità.
In ciascuno studio si è passati ad una modellazione equivalente del problema in analogia alla teoria di Hertz. Nel primo caso è stato usato un approccio numerico F.E.M. con la finalità principale di identificare le grandezze fisiche significative del fenomeno. Nella seconda parte è stata presa in esame in primo luogo una possibile semplificazione bidimensionale del problema, successivamente si è proceduto all’estensione al modello 3D dei risultati ottenuti. Nell’ultima parte infine, è stata analizzata l’influenza di un raccordo sulla pressione di contatto in prossimità del bordo.
Il risultato principale ottenuto è rappresentato da una relazione numerica approssimante l’andamento della pressione di contatto nella zona d’estremità.
ABSTRACT
The present work of thesis has been carried out in collaboration with Avio Propulsione Aerospaziale S.p.A. and it consists in the analysis and understanding of the edge effects during gear set mesh with particular reference for spur gears. This phenomenon is currently little considered because almost the totality of gears shows a lead crown on the flank of the tooth that prevents the condition of complete contact. Moreover the normative requires the use of empirical factors for designing.
In this dissertation will be examined the edge effects in three different situations: • mesh between gears with free planes aligned of the same material; • mesh between gears with free planes not aligned;
• mesh between gears with free planes not aligned in presence of an extremity connection.
In every study it has been formulated an equivalent model of the problem in analogy to Hertz theory. In the first case it has been used a numerical approach F.E.M. with the main purpose to identify the meaningful physical variables of the phenomenon. In the second part it has been considered first, a possible bidimensional simplification of the problem, second an extension of results obtained is proposed toward the model 3D. Finally, it has been analyzed the influence of a connection on the contact pressure near the edge. The main result obtained is represented by numerical relation approximating contact pressure distribution near the edge.
1
Introduzione
Il presente lavoro di tesi si inserisce nell’ambito della collaborazione tra il dipartimento di costruzioni meccaniche, nucleari e della produzione DIMNP di Pisa ed AVIO Propulsione S.p.A. inerente la progettazione e ricerca avanzata nel campo di ingranaggi per applicazioni aeronautiche.
Allo stato attuale, la progettazione di ingranaggi non può prescindere dalla normativa specifica. Nell’ottica dell’ottenimento delle migliori prestazioni, l’approccio secondo norma si rivela poco efficace in quanto a fronte della semplicità e velocità di calcolo si ottiene un risultato spesso inaccurato nell’ambito delle applicazioni aeronautiche.
La realizzazione di soluzioni innovative procede sinergicamente su due strade complementari: • analisi numeriche con software dedicati (es. Helical 3D®) e F.E.M. (es. Ansys®);
• prove sperimentali su banchi speciali.
Nella trattazione seguente sono analizzati gli effetti di bordo presenti nella trasmissione di potenza mediante ingranaggi cilindrici in relazione al fenomeno del contatto non conforme caratterizzante questo tipo di accoppiamento meccanico. In particolare, sono prese in esame tre situazioni:
1. ingranamento tra ruote con superfici libere allineate; 2. ingranamento tra ruote con superfici libere non allineate;
3. ingranamento tra ruote con superfici libere non allineate in presenza di un raccordo d’estremità. Solitamente gli effetti di bordo non sono considerati in fase di progettazione fondamentalmente per due ragioni:
• notevole complessità del problema dovuta alla natura tridimensionale del fenomeno;
• presenza di una bombatura lungo il fianco del dente in direzione parallela all’asse di rotazione della ruota. Questa caratteristica di fabbricazione è prevista principalmente per compensare gli errori di disallineamento tra gli assi della coppia di ruote o più in generale tutta la catena di tolleranze di montaggio e di funzionamento del sistema.
Oltre all’ormai classico metodo degli elementi finiti, il problema può essere affrontato con softwares dedicati che si avvalgono di risultati teorici di casi noti in forma chiusa, ad esempio la soluzione di Bousinnesq per un dominio rettangolare. Il principale vantaggio di questi softwares consiste nella riduzione dei tempi di elaborazione della soluzione, di contro però, oltre al fatto che il loro utilizzo resta limitato alla particolare applicazione, portano con sé i limiti della soluzione analitica, nella fattispecie le zone di estremità non sono adeguatamente caratterizzate.
2
Contatto tra ruote con superfici libere allineate
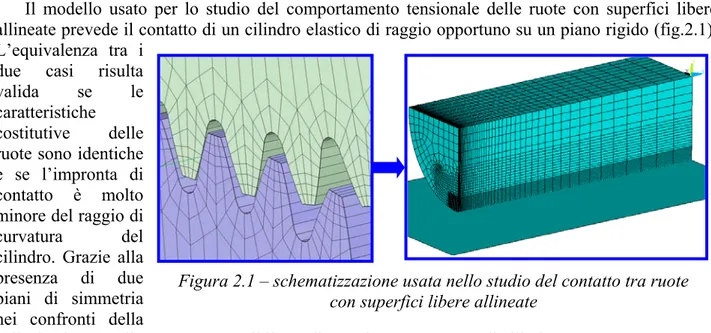
Il modello usato per lo studio del comportamento tensionale delle ruote con superfici libere allineate prevede il contatto di un cilindro elastico di raggio opportuno su un piano rigido (fig.2.1). L’equivalenza tra i
due casi risulta valida se le caratteristiche
costitutive delle ruote sono identiche e se l’impronta di contatto è molto minore del raggio di
curvatura del cilindro. Grazie alla
presenza di due piani di simmetria nei confronti della
sollecitazione applicata è stato possibile studiare soltanto un quarto di cilindro.
Figura 2.1 – schematizzazione usata nello studio del contatto tra ruote con superfici libere allineate
X
Y Z
Per la rappresentazione del cilindro sono stati usati gli elementi solidi BRICK 45 ad otto nodi mentre per caratterizzare il contatto sono stati scelti gli elementi CONTACT 173 applicati alla superficie laterale e l’elemento TARGET 170 applicato al piano rigido. Alla superficie superiore del semicilindro è stato imposto uno stato di spostamento, mentre il piano è stato vincolato in tutte le direzioni.
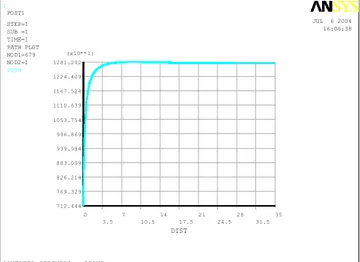
I risultati dell’analisi hanno evidenziato un andamento della pressione di contatto lungo la larghezza di fascia caratterizzato da tre elementi
(fig. 2.2):
1. pressione costante sufficientemente lontano dai bordi pari a quella calcolabile teoricamente con un modello plane strain; 2. pressione di bordo inferiore rispetto al
valore di riferimento;
3. lieve sovraelongazione nel passaggio tra il valore d’estremità e quello di riferimento. Successivamente sono state eseguite ulteriori simulazioni al fine di verificare la convergenza della soluzione. Le osservazioni emerse a seguito di queste analisi possono essere così riassunte:
• la pressione di bordo è quella che risente maggiormente della qualità della mesh, effetto atteso a causa dei forti gradienti di tensione in tutte le direzioni;
• la diminuzione marcata di pressione all’estremità è coerente con la possibilità di espansione del cilindro all’estremità, associata ad essa è osservabile una riduzione della larghezza dell’impronta di contatto
(fig.2.3);
• l’uso di un modello di stato piano di tensione per caratterizzare le zone di bordo, tenderebbe a sovrastimare la pressione all’estremità di una quantità notevole, prevedendo una diminuzione di circa 9 % contro circa il 46% ottenuto dalle simulazioni;
• il parametro più interessante in riferimento alla resistenza strutturale,
ovvero la sovraelongazione %, è risultata essere al di sotto dello 0.5% quindi poco significativa ai fini della progettazione;
• per caratterizzare bene il fenomeno d’estremità sono necessari sia un buon infittimento nella zona di contatto sulla superficie libera sia un ottimo infittimento in prossimità del bordo in direzione assiale.
2.1 Andamento della pressione di contatto al bordo al variare di ν
Il passo successivo nella comprensione del fenomeno è stato quello di investigare sul comportamento della pressione di contatto all’estremità del cilindro al variare della grandezza costitutiva ν. La scelta di questo studio è derivata da un’osservazione di natura fisica: la mancanza di tensioni in direzione parallela all’asse del cilindro, sul bordo non garantisce la condizione di stato
1 712.444 769.329 826.214 883.099 939.984 996.869 1053.754 1110.639 1167.524 1224.409 1281.292 (x10**1) 0 3.5 7 10.5 14 17.5 21 24.5 28 31.5 35 DIST
CONTATTO CILINDRO - PIANO
JUL 6 2004 16:06:38 POST1 STEP=1 SUB =1 TIME=1 PATH PLOT NOD1=679 NOD2=1 PCON
Figura 2.2 – andamento della pressione di contatto [MPa] a partire dall’estremità libera
(distanza [mm])
piano di deformazione ed il cilindro è libero di espandersi. All’espansione poissoniana è associato un rilassamento delle tensioni nella zona d’estremità.
Anche in questo caso è stata eseguita una campagna di prove in cui sono stati monitorati i principali parametri identificati dal precedente studio di convergenza, al termine del quale è stato osservato che:
• la pressione massima e quella in ipotesi di plane strain aumentano all’aumentare del modulo di Poisson mentre si ha un comportamento opposto da parte della pressione di contatto all’estremità (fig. 2.4);
• la sovraelongazione % mostra un andamento crescente con ν ma non supera mai comunque lo 0.7 % per cui la sua importanza risulta
scarsa;
• la pressione di contatto al bordo (fig. 2.4) risulta quasi nulla per materiale incomprimibile (ν = 0.5) mentre per ν = 0 si manifesta l’uguaglianza tra la soluzione plane strain e plane stress e la pressione di contatto è costante lungo tutta la generatrice del cilindro.
Il risultato più significativo è rappresentato dalla correlazione trovata tra il rapporto delle pressioni di contatto al bordo rispetto al valore di riferimento plane strain e il modulo di Poisson. Un’ottima approssimazione della curva (fig. 2.5) è descritta dalla parabola di equazione :
(
) (
)
PlaneStrainbordo p
p = 1−2⋅ν ⋅ 1+ν ⋅ (1).
3
Contatto tra ruote con superfici libere non allineate
L’ingranamento tra ruote con superfici libere non allineate in pratica si verifica quando: • le ruote hanno differente larghezza di fascia;
2.4 - andamento delle pressioni più significative [MPa] al variare di ν 0 2000 4000 6000 8000 10000 12000 14000 16000 0 0.1 0.2 0.3 0.4 0.5 0.6 M o d u l o d i P o i sso n
Pr essione di bor do Pr essione Massima Pr essione di Plane St r ain
Figura 2.5 – andamento del rapporto % di pressioni e il modulo di Poisson
• le superfici di base delle ruote sono parallele ma non complanari a causa di una traslazione relativa.
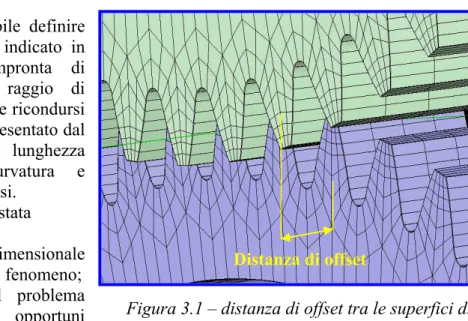
In entrambi i casi è possibile definire una distanza di “offset” come indicato in figura 3.1. Ipotizzando l’impronta di contatto molto minore del raggio di curvatura locale, è stato possibile ricondursi ad un modello equivalente rappresentato dal contatto tra due cilindri di lunghezza diversa, con raggi di curvatura e caratteristiche costitutive qualsiasi.
L’analisi degli effetti di bordo è stata condotta in due passi:
1. ricerca di un modello bidimensionale semplificato per descrivere il fenomeno; 2. estensione dei risultati al problema
tridimensionale con opportuni accorgimenti.
3.1 Modello bidimensionale
Il problema può essere trattato in due dimensioni se si ipotizza uno stato piano di deformazione in direzione circonferenziale. In questo caso è allora possibile applicare i risultati dello studio svolto da J.Dundurs e M.-S. Lee. La teoria riguarda il contatto di un cuneo inclinato di spessore infinito su un semipiano elastico ed indica la presenza di una concentrazione di tensione in prossimità dello spigolo. Note le caratteristiche costitutive dei corpi e l’angolo di inclinazione del cuneo, imponendo le opportune condizioni al contorno, è possibile prevedere l’ordine della singolarità relativa alla tensione di contatto:
( )
10 −
= p
ij r
σ con p soluzione dell’equazione trascendente
(
p;α,γ) (
= 1+α)
cospπ(
p2sin2γ −sin2 pγ)
−21(
1−α)
sin pπ(
psin2γ +sin2pγ)
=0D (2)
in cui γ è l’angolo di inclinazione del cuneo mentre il parametro α (-1 ≤ α ≤ 1) è un indice della differenza di rigidezza monoassiale dei due corpi dipendente esclusivamente dalle loro caratteristiche costitutive.
In prossimità del bordo è quindi nota la “forma” della curva di pressione ma non è definita l’intensità. L’analisi è stata orientata alla ricerca dell’eventuale legame tra la costante di pressione e i parametri del problema mediante una serie di simulazioni F.E.M.
Il modello plane strain dei cilindri è rappresentato dal contatto tra due rettangoli. La mesh ottimale è stata realizzata adottando la metodologia “bottom-up” suddividendo le aree in tre parti (fig.3.2):
1. la prima, in prossimità dello spigolo, si estende per una quantità piccolissima in direzione assiale ed è suddivisa in pochi elementi di ugual dimensione;
Distanza di offset
Figura 3.1 – distanza di offset tra le superfici di base delle ruote
2. una parte centrale costruita generando una striscia di elementi in direzione radiale successivamente estrusi assialmente. L’algoritmo
di estrusione è stato scelto suddividendo in parti uguali la funzione singolare prevista dalla teoria di Dundurs e determinando gli intervalli ∆r con una inversione della formula (fig. 3.3);
3. un’ultima parte di estensione molto maggiore delle altre caratterizzata da un infittimento grossolano.
Le estensioni di ciascuna zona sono state oggetto di studi di convergenza della soluzione.
I vincoli adottati nel modello (fig. 3.2) rappresentano tre condizioni diverse:
1. vincoli rigidi sulla linea di base del rettangolo inferiore per scongiurare la labilità;
2. vincoli di simmetria sulle linee laterali allineate dei rettangoli;
3. vincoli di costraint points in direzione radiale applicati sulla linea di interfaccia dei rettangoli. Come sollecitazione esterna è stata applicata una pressione sul lato superiore del rettangolo corto (fig. 3.2). Uno studio di convergenza ha mostrato un andamento crescente della tensione nello spigolo all’aumentare dell’infittimento.
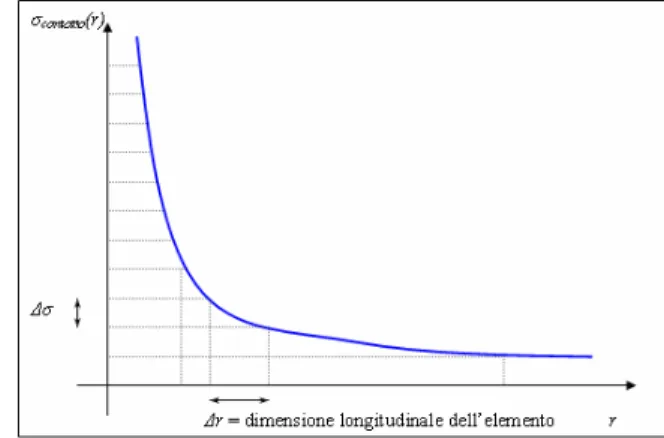
3.1.1 Analisi adimensionale
Lo scopo di questa analisi è stato quello di determinare la costante k tale che in un intorno dello spigolo (fig. 3.4) valesse la relazione:
( )
= ⋅ p−1contatto r k r
p (3)
L’equazione è coerente dimensionalmente se
[ ]
⋅ = p−1 mm mm N k .E’ allora probabile un legame del tipo:
(
p d)
k p d pk
k = = ⋅ ⋅ 1−
1
, (4)
in cui p è una grandezza dimensionata come una forza distribuita su una lunghezza e d è una grandezza dimensionata come una lunghezza.
La scelta di p e d è stata una conseguenza della valutazione dei possibili parametri: se per il termine
di forza distribuita la sollecitazione esterna p0 era l’unica scelta possibile, l’individuazione di d ha presentato maggiori difficoltà, le alternative possibili erano:
- uso di uno dei lati dei rettangoli;
- uso di un parametro di lunghezza derivato, ad esempio p0/E*, p0/E1 o p0/E2 .
Nel primo gruppo di scelta l’unica grandezza plausibile era l’altezza del rettangolo superiore l a causa del fatto che il rettangolo inferiore rappresentava un half-space con lati di dimensioni arbitrarie (purchè sufficientemente grandi).
La scelta di un parametro del secondo tipo è stata impedita oseervando che il problema del contatto nel piano diventa lineare. A seguito di queste considerazioni:
p l p k k= ⋅ ⋅ 1− 0 1 (5)
( )
0 1 1 − ⋅ ⋅ = p contatto l r k p r p (6)con k1 costante numerica determinata a seguito delle simulazioni effettuate.
Figura 3.4 – rappresentazione schematica del problema Figura 3.3 – criterio di scelta di suddivisione longitudinale della mesh
3.1.2 Presentazione dei risultati
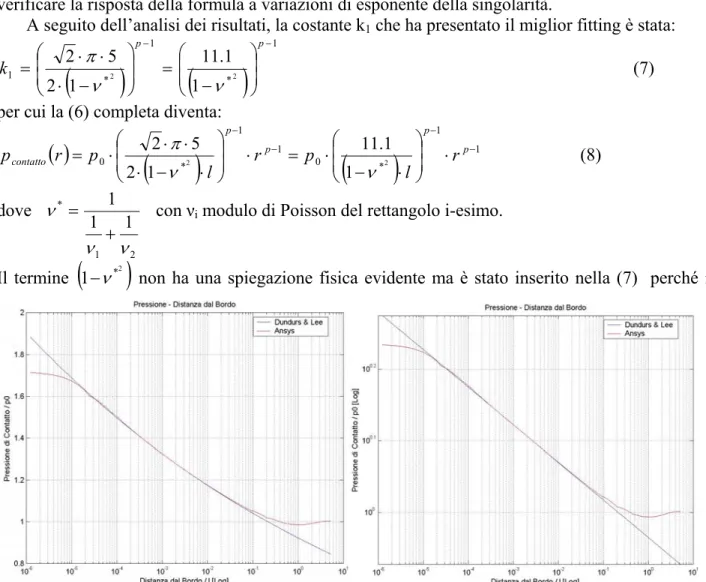
I parametri oggetto di variazione nelle simulazioni sono stati i moduli di elasticità e i moduli di Poisson dei due rettangoli. Questa scelta è stata interessante principalmente perché ha permesso di verificare la risposta della formula a variazioni di esponente della singolarità.
A seguito dell’analisi dei risultati, la costante k1 che ha presentato il miglior fitting è stata:
(
)
(
)
1 * 1 * 1 2 2 1 1 . 11 1 2 5 2 − − − = − ⋅ ⋅ ⋅ = p p k ν ν π (7) per cui la (6) completa diventa:( )
(
)
(
)
1 1 * 0 1 1 * 0 2 2 1 1 . 11 1 2 5 2 − − − − ⋅ ⋅ − ⋅ = ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ = p p p p contatto r l p r l p r p ν ν π (8) dove 2 1 * 1 1 1 ν ν ν += con νi modulo di Poisson del rettangolo i-esimo.
Il termine
(
1−ν*2)
non ha una spiegazione fisica evidente ma è stato inserito nella (7) perché intutte le prove ha portato ad un miglioramento della correlazione. Nella figura 3.5 è riportato l’andamento della pressione di contatto in funzione della distanza dallo spigolo nel caso di contatto acciaio su acciaio in scale adimensionalizzate. Al variare di E e ν sono stati confrontati i risultati delle simulazioni con la previsione della (8) ed è emerso che:
• la costante ricavata sperimentalmente (7) è la migliore secondo il criterio della minimizzazione dell’errore assoluto;
• le variazioni più significative sull’andamento di pressione sono state ottenute al variare dei moduli di elasticità piuttosto che per variazioni del modulo di Poisson;
• l’errore assoluto nella porzione di rettangolo individuata come zona di validità della
Figura 3.5 - andamento della pressione di contatto in funzione della distanza dallo spigolo (a - scala semilogaritmica; b - logaritmica)
Figura 3.6 - andamento dell’errore % in funzione della distanza dallo spigolo
formula in nessun caso ha superato il 4 % copiando l’andamento numerico in maniera più che soddisfacente (un esempio di rappresentazione grafica dell’errore è riportato in fig. 3.6).
3.2 Estensione dello studio al caso tridimensionale
Le principali differenze riscontrate rispetto alla trattazione 2D sono state: • la presenza dei raggi di curvatura dei cilindri in contatto;
• la presenza di non linearità di contatto non conforme.
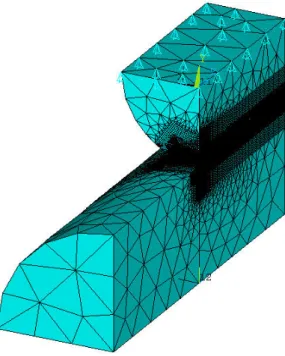
Il modello F.E.M. è stato creato cercando di ottenere il compromesso tra il più alto numero di elementi compatibili con le prestazioni del calcolatore e il miglior risultato nella zona di interesse oggetto dell’analisi. Usando il metodo “Top-Down” sono state create tre mesh:
• mesh molto fitta di tipo mapped per il settore cilindrico in contatto;
• mesh di tipo free a medio infittimento in un volume adiacente al primo (fig.3.7);
• mesh di tipo free ad elementi tetraedrici con un livello di infittimento grossolano nel volume rimanente.
Il completamento del modello è stato raggiunto con l’applicazione degli elementi di contatto e con l’imposizione dei vincoli:
• vincoli di simmetria su due piani in analogia al contatto cilindro-piano; • vincoli di appoggio sul cilindro inferiore per scongiurare la labilità;
• spostamento imposto alla superficie piana del cilindro con superficie libera come sollecitazione applicata (fig. 3.8).
L’analisi della soluzione ha evidenziato due particolari degni di nota:
1. le deformazioni estensionali in direzione radiale e assiale in prossimità dello spigolo mostrano una singolarità mentre la deformazione estensionale in direzione circonferenziale presenta un valore finito, confermando l’ipotesi di plane strain usata nel modello bidimensionale;
2. la larghezza dell’impronta di contatto nella zona di estremità è maggiore rispetto al valore hertziano di riferimento (fig. 3.9).
Figura 3.7 – particolare della mesh
Figura 3.8 – modello tridimensionale
3.2.1 Estensione della formula approssimante
Nel modello tridimensionale, a causa della non linearità del contatto il problema non può più prescindere dalla condizione di sollecitazione applicata, inoltre l’introduzione dei raggi di curvatura contribuisce ad aumentare il ventaglio delle variabili in gioco. Come variabili significative in relazione alla determinazione della pressione di bordo è stato ritenuto opportuno considerare la semimpronta di contatto b e la pressione hertziana massima.
A seguito di questa considerazione, la formula nel caso tridimensionale assume una forma del tipo:
( )
(
)
1 1 * 1 2 1 1 − − ⋅ − ⋅ ⋅ ⋅ = p p HzMax r b p k r p ν (9)La semplice trasposizione della (6) si è rivelata però incompleta. Dall’analisi dei risultati delle simulazioni numeriche nel caso 3D, è sorta la necessità di inserire due termini moltiplicativi dipendenti dalle caratteristiche costitutive:
1 2 1 2 1 2 1 2 10 1 . 1 10 1 ) , ( E E E E E E E k ⋅ − = ⋅ − + = (10) ) 3 . 0 ( 1 ) ( 1 1 3
ν
= −ν
− k (11)Questa differenza tra le relazioni può essere spiegata intuitivamente osservando che nel caso piano la dimensione geometrica usata era indipendente dalla variazione di E o di ν di uno dei due corpi. Nel problema tridimensionale la semimpronta è influenzata da queste variazioni che sono compensate per l’appunto dai fattori (10) e (11).
In definitiva, la relazione (8) estesa al caso 3D risulta:
[
]
(
)
1 1 * 1 1 2 2 1 1 ) 3 . 0 ( 1 10 1 . 1 726 . 0 ) ( − − ⋅ − ⋅ ⋅ ⋅ − − ⋅ ⋅ − ⋅ = p p HzMax r b p E E r p ν ν (12)I parametri usati per la validazione della (12) sono stati: • i raggi di curvatura dei cilindri R1 ed R2;
• la condizione di spostamento imposto (o carico); • i moduli di elasticità dei cilindri E1 ed E2; • i moduli di Poisson dei cilindri ν1 e ν2.
A seguito dell’analisi dei risultati ottenuti dalle simulazioni numeriche è possibile osservare che: • l’approssimazione sull’andamento della pressione di contatto fornita da Ansys® al variare dei
raggi di curvatura fornisce un valore assoluto dell’errore non superiore al 10 %;
• rapporti tra raggi di curvatura minori di uno, ovvero con raggio del cilindro con superficie libera maggiore dell’altro, forniscono errori maggiori rispetto al caso inverso;
• la formula ha mostrato una buona correlazione anche a seguito di ampie variazioni della sollecitazione applicata, dimostrandosi accettabile nei limiti di rapporti impronta di contatto - raggio di curvatura contemplati dalla teoria di Hertz;
• le variazioni dei moduli di Poisson in forma combinata si sono dimostrate le più stabili in relazione al valore assoluto dell’errore;
• la (12) non è applicabile se E2 > E1. Il comportamento limite E2/E1 = ∞ è quello schematizzato dal contatto cilindro – piano.
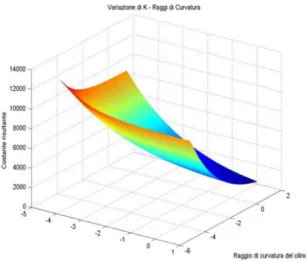
La sintesi delle principali variazioni della costante moltiplicativa è riportata graficamente nelle mappe tridimensionali mostrate nelle figure, dalle quali emerge che:
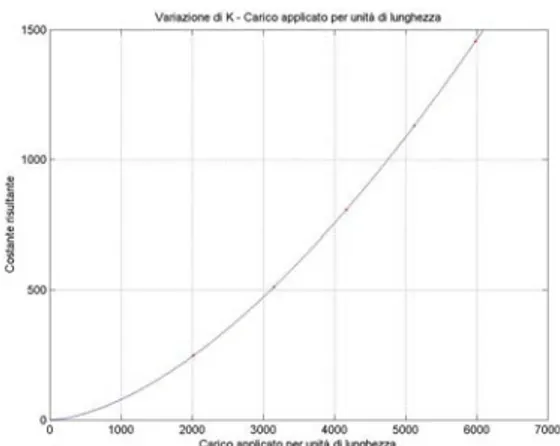
• le variazioni di raggio comportano delle variazioni della costante secondo curve iperboliche (fig.3.10); • la legge di variazione rispetto al carico applicato
non è lineare, ma ha un gradiente crescente (fig.3.11);
• la costante presenta un’alta sensibilità nei confronti del modulo di Poisson relativo al cilindro con estremità libera mentre è poco sensibile all’altro. L’andamento in funzione di ν1 presenta una componente lineare dominante e dei termini di ordine superiore che inducono una leggera curvatura sulla superficie (fig.3.12);
• la costante presenta un’alta sensibilità rispetto al valore di E del cilindro con estremità libera mentre è meno sensibile all’altro.
4
Influenza di un raccordo di estremità
La parte finale del lavoro svolto ha riguardato l’analisi del comportamento strutturale in presenza di un raccordo al posto dello spigolo vivo sulla superficie d’estremità.
Lo studio agli elementi finiti è stato condotto con la tecnica delle sottostrutture, nella fattispecie è stato generato un sottomodello del dettaglio geometrico (fig. 4.1) analizzato imponendo uno stato di spostamento calcolato dall’analisi del modello grossolano. Nella fase di modellazione è stata prestata particolare cura all’infittimento della mesh della zona raccordata, più in dettaglio sono state eseguite quattro rifiniture nel piano di simmetria ed è stato previsto un infittimento a passo progressivamente crescente in senso circonferenziale. L’unico vincolo reale applicato è quello di simmetria in maniera
analoga al modello grossolano. Sulle superfici esterne dei due corpi il contatto è stato realizzato con gli elementi preposti.
La condizione di sollecitazione esterna applicata è rappresentata dallo stato di spostamento imposto alle superfici di interfaccia i cui valori sono stati ricavati dal modello coarse.
Dal risultato della simulazione è emerso un andamento della pressione di contatto in cui si possono distinguere tre zone (fig. 4.2):
1. la prima è caratterizzata da un andamento tipico hertziano per il contatto di punto tra corpi a doppia curvatura;
2. la seconda mostra l’andamento asintotico visto in presenza di uno spigolo vivo;
Figura 3.11 – dipendenza dal carico
Figura 3.12 – dipendenza dai ν
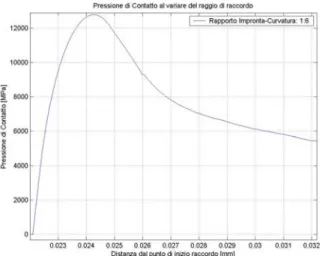
La fase di studio successiva si è concentrata sull’analisi del comportamento della pressione di contatto lungo la generatrice appartenente al piano di simmetria in funzione del raggio di raccordo. In particolare sono state effettuate una serie di prove a parità di impronta di contatto i cui risultati sono riassunti in figura 4.3.
Dall’osservazione delle curve di pressione di contatto è possibile effettuare alcune considerazioni:
• all’aumentare del raggio di raccordo, il valore di massimo della pressione di contatto diminuisce e trasla allontanandosi dal punto di inizio contatto;
• per raggi piccoli si ha una parte hertziana più stretta con un picco più alto mentre per raggi grandi accade l’inverso;
• il limite inferiore è rappresentato dal comportamento asintotico, visto nel caso di cilindri con spigolo vivo (r = 0 );
• il limite superiore è rappresentato dal contatto tra due sfere descritto dalla teoria di Hertz.
Conclusioni
I risultati a cui si è pervenuti al termine del presente lavoro di tesi sono i seguenti:
• comprensione del comportamento delle principali grandezze fisiche (tensioni, deformazioni, ecc.) in prossimità del bordo nel caso di: contatto tra corpi con superfici libere allineate di ugual materiale, corpi con superfici libere non allineate, presenza di un raccordo; • nel caso di ingranamento tra ruote con superfici
libere allineate, la pressione di bordo è risultata: - inferiore rispetto al valore di riferimento in ipotesi plane strain;
- dipendente in maniera significativa dal valore del modulo di Poisson;
• determinazione di una relazione numerica (8) che esprime la pressione di contatto all’estremità di un cuneo di spessore infinito su un semispazio elastico avente un errore rispetto alle simulazioni non superiore al 4 % in un intorno del bordo pari a 10-1 l (fig. 3.4);
• determinazione di una relazione numerica (12) che esprime la pressione di contatto all’estremità della generatrice più sollecitata nel contatto tra cilindri avente un errore non superiore al 10 % in un intorno del bordo pari a 10-1 b;
• comprensione dell’influenza della sollecitazione esterna applicata, dei raggi di curvatura, dei moduli di elasticità e di Poisson dei cilindri sulla pressione di bordo;
• comprensione dell’influenza di un raccordo d’estremità sull’andamento della pressione di contatto;
• conoscenza della forma dell’impronta di contatto nei tre casi studiati.
Sviluppi futuri potrebbero prevedere la validazione della (12) nel caso in cui lo spigolo in contatto presenti un angolo non retto (γ ≠ 90°) simulando così il caso di ruote cilindriche a denti elicoidali, oppure potrebbe essere condotto uno studio sull’andamento del massimo di pressione in relazione al raggio di raccordo e all’impronta di contatto e della possibile correlazione con la costante numerica presentata.
Figura 4.2 – pressione di contatto
Figura 4.3 – confronto al variare del raccordo