5 Simulazione di alcune manovre
Per verificare il funzionamento del controllore descritto nel capitolo 4, sono state effettuate le simulazioni di alcune semplici manovre a velocità costante: marcia in rettilineo con disturbo laterale, cambio di corsia, curva “ad U” e manovra di “otto”.
Figura 5.1 - Piaggio Liberty 125 4T
I dati del motociclo usato per le simulazioni, sono stati forniti da Piaggio & C. S.p.A. e sono relativi allo scooter Liberty 150 4T (Figura 5.1) guidato da un pilota di 70 kg di massa.
La stessa società ha inoltre fornito, per la manovra di “otto”, i segnali relativi alle misure sperimentali di alcune fondamentali grandezze quali angoli di sterzo e di rollio, coppia di sterzo, spostamenti delle sospensioni ecc.; ciò ha consentito di poter validare il controllore verificando la corrispondenza tra i segnali misurati e quelli relativi alle simulazioni.
Tutte le manovre sono state eseguite alla velocità costante di 30 km/h, alla quale sono state eseguite anche le prove sperimentali sopra menzionate; nei prossimi paragrafi sono riportati i risultati delle suddette simulazioni.
5.1 Marcia in rettilineo con disturbo laterale
Nella seguente simulazione il motociclo, che procede in rettilineo a velocità costante, riceve una forza laterale per un intervallo di tempo molto piccolo (Figura 5.2): tale disturbo può idealmente rappresentare un improvviso colpo di vento. Esso viene applicato verso sinistra, ad un’altezza di 1 metro dal suolo ed avanzato longitudinalmente di 0,1 metri
rispetto alla posizione del baricentro del sistema veicolo-pilota. Il motociclo verrà così sbilanciato e il pilota sarà costretto ad agire sullo sterzo per riportare il veicolo in posizione verticale, recuperando contemporaneamente la traiettoria originale.
Figura 5.2 – Forza di disturbo laterale.
5.1.1 Risultati delle simulazioni
In Figura 5.3 è illustrata una sequenza di fotogrammi della simulazione, realizzata in ambiente post-processor di Adams.
In Figura 5.4 sono invece riportati gli andamenti nel tempo dell’angolo di rollio φ, di quello di sterzo δ, e della coppia di sterzo τ. Si nota che il disturbo laterale, applicato dopo due secondi dall’inizio della simulazione, sbilancia il veicolo generando un angolo di rollio negativo; questo è prontamente bilanciato dal crescere della coppia di sterzo applicata dal guidatore e del conseguente angolo di sterzo. Il rollio cambia dunque segno in quanto ora il controllore deve recuperare gli errori di direzione e posizione che si sono venuti a creare.
Figura 5.4 – Andamenti di φ, δ e τ nel caso di disturbo laterale.
Notiamo inoltre che l’angolo di rollio supera i 12,5 gradi per recuperare gli errori e riportarsi nella configurazione iniziale; ciò consente una rapida compensazione degli errori, come mostrato in Figura 5.5. Questo è reso possibile dall’adottare coefficienti del controllore variabili, come descritto nel paragrafo 4.3. Infatti in questo caso l’angolo di rollio desiderato φr è costantemente nullo, essendo la traiettoria imposta rettilinea; adottare valori bassi per i coefficienti K0 e K1 consente al controllore di poter discostarsi dal valore
nullo dell’angolo di rollio, imposto dalla traiettoria, e recuperare velocemente la posizione voluta.
Figura 5.5 – Errore di posizione e angolo di imbardata nel caso di disturbo laterale.
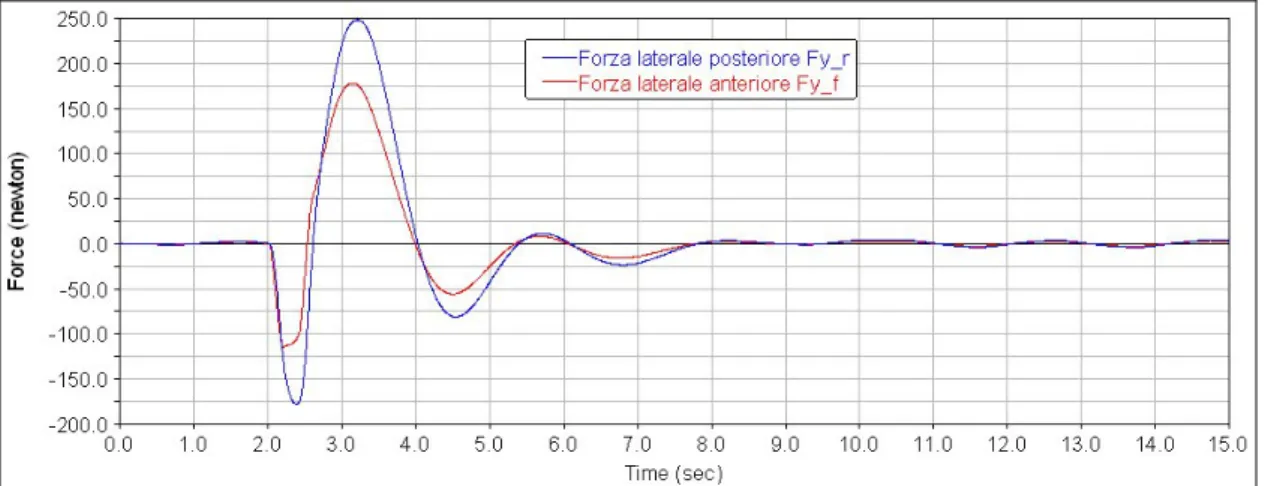
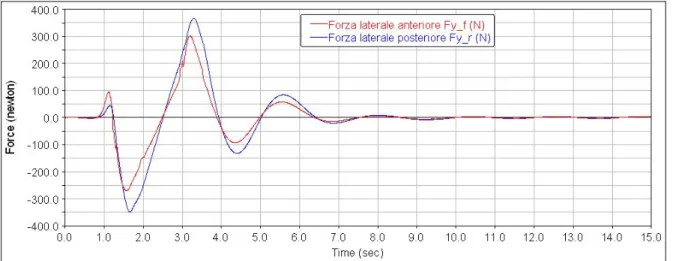
In Figura 5.6 sono diagrammate le forze laterali agenti sui pneumatici anteriore e posteriore; si nota che dopo l’applicazione del disturbo laterale verso sinistra (t=2 s) le forze laterali sono inizialmente negative, ossia dirette anch’esse verso sinistra (si adottano le convenzioni SAE di Figura 3.19 per le forze agenti sui pneumatici).
Ciò è necessario per compensare il rollio verso sinistra (dunque negativo) visibile in Figura 5.4, generato dal disturbo laterale. Una volta riportato il veicolo in posizione verticale il controllore continua ad inclinare lo scooter verso destra in modo da poter recuperare l’errore di posizione che si è venuto a creare. A questo punto le forze laterali cambiano di segno, il veicolo recupera gli errori ed inizia ad oscillare attorno al rettilineo iniziale con legge adeguatamente smorzata.
In Figura 5.7 sono mostrati gli andamenti nel tempo dei carichi verticali agenti sui pneumatici e le escursioni degli ammortizzatori; da tali diagrammi si può osservare il trasferimento di carico dal posteriore all’anteriore all’inizio della brusca manovra compiuta per mantenere l’equilibrio del veicolo.
Figura 5.7 – Carichi verticali sui pneumatici ed escursioni ammortizzatori.
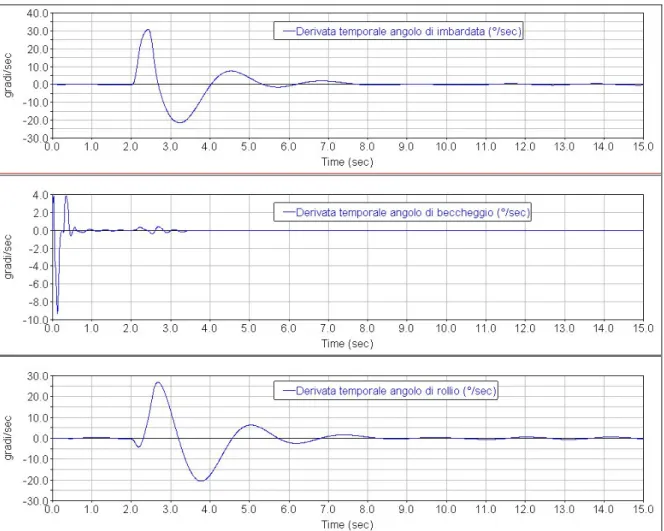
In Figura 5.8 sono riportati infine gli andamenti nel tempo delle derivate temporali degli angoli di imbardata, beccheggio e rollio.
Figura 5.8 – Derivate temporali degli angoli di imbardata, beccheggio e rollio.
5.1.2 Influenza dei coefficienti K
0, K
1, K
2sul moto di rollio del sistema
Per chiarire l’influenza che i singoli coefficienti K0, K1, K2 hanno sulla dinamica del sistema si escluderà la compensazione degli errori sulla traiettoria, mantenendo nulli i coefficienti K3 e K4: il controllore agirà dunque solo per riportare il motociclo nella posizione verticale.
In Figura 5.9 sono diagrammati gli andamenti nel tempo degli angoli di rollio e sterzo per vari valori di K2. All’aumentare di K2 si notano i seguenti effetti:
• diminuzione del picco dell’angolo di rollio φ; il picco dell’angolo di sterzo δ ha invece un incremento, anche se molto piccolo
• aumento della frequenza di φ(t) e δ(t).
Per il caso di rettilineo si è dunque scelto per K2 un valore “plausibile” pari a .
60
rad m N⋅
Figura 5.9 – Disturbo laterale in rettilineo: influenza del coefficiente K2 (K3= K4=0).
In Figura 5.10 si riportano le medesime grandezze per vari valori del coefficiente K1; è ben visibile come all’aumentare di K1 la risposta del sistema sia sempre più smorzata. Aumentando ancora K1 la risposta cessa di essere oscillatoria: questa situazione non è però verosimile in quanto il pilota reale tende ad oscillare leggermente attorno alla configurazione di equilibrio in seguito ad un disturbo laterale che lo allontana dalla posizione verticale. Si è dunque scelto un valore di K1 intermedio pari a
rad s m N⋅ ⋅
36 per il
caso di marcia in rettilineo ora considerato (φr=0).
In Figura 5.11 è infine analizzata l’influenza del coefficiente K0: si può osservare come all’aumentare di K0 si ha dapprima una diminuzione del valore massimo dell’angolo di rollio; superato un certo valore di K0 il picco dell’angolo di rollio inizia ad aumentare ed il suo andamento diventa sempre meno smorzato. L’andamento dell’angolo di sterzo presenta per valori elevati di K0 la nascita di onde a frequenza molto elevata (curva relativa al valore di K0 pari a quattro volte il valore definitivo). Anche in questo caso si è scelto un valore “plausibile” per K0, pari a
rad s m N 2 8 , 10 ⋅ ⋅ .
5.1.3 Influenza dei coefficienti K
3e K
4sulla traiettoria percorsa
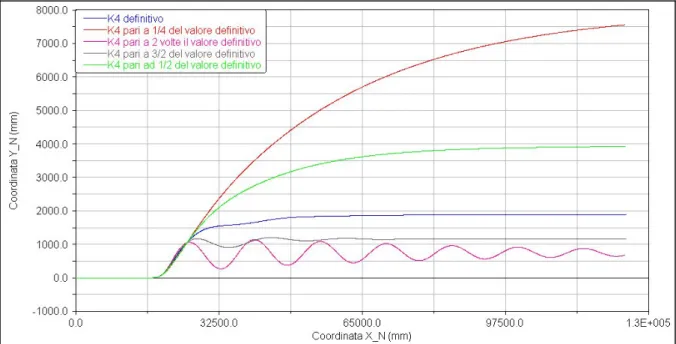
Per evidenziare l’influenza del coefficiente K4 sulla risposta del sistema al disturbo laterale si manterrà dapprima nullo K3; in questo modo il controllore cercherà di recuperare il solo errore di direzione, disinteressandosi dell’errore di posizione rispetto alla traiettoria da seguire. In Figura 5.12 sono diagrammate le traiettorie percorse dal veicolo per diversi valori di K4 utilizzando un tempo di previsione degli errori Tpe pari a 0,6 s. Si nota che all’aumentare di K4 il veicolo recupera più velocemente l’errore di direzione; aumentando ancora K4 il veicolo inizia a serpeggiare in modo innaturale. Si è dunque determinato K4 in modo da ottenere un comportamento verosimile del controllore: il valore scelto è pari a
rad m N⋅
50 .
Figura 5.12 – Disturbo laterale in rettilineo: influenza del coefficiente K4 (K3=0).
In Figura 5.13 sono riportate le traiettorie percorse dal veicolo per diversi valori di K3, con tutti gli altri coefficienti pari al loro valore ottimale, scelto come descritto in precedenza. In questo caso si nota che all’aumentare di K3 il veicolo recupera più rapidamente l’errore di posizione, sino ad arrivare a percorrere traiettorie eccessivamente zigzaganti per valori troppo elevati di K3; in definitiva si è scelto per questo coefficiente un valore pari a 6 N.
Figura 5.13 – Disturbo laterale in rettilineo: influenza del coefficiente K3.
5.1.4 Influenza del tempo di previsione T
pesulla traiettoria percorsa
L’ultimo parametro da discutere è il tempo di previsione degli errori di traiettoria Tpe; questo ha un significato fisico ben preciso, in quanto determina quanto lontano nel tempo valutare gli errori che si commetteranno rispetto alla traiettoria da seguire.
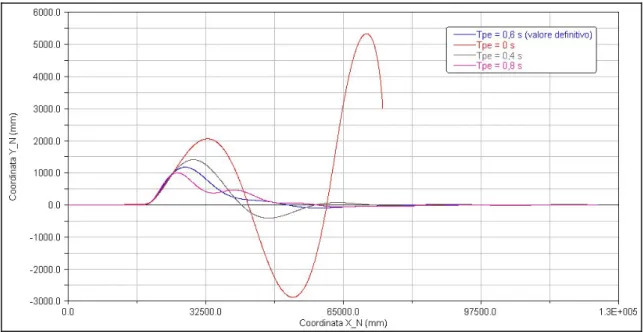
In Figura 5.14 sono diagrammate le traiettorie percorse per diversi valori del tempo di previsione Tpe. Si osserva che senza la previsione degli errori (Tpe = 0) si ha instabilità del sistema, mentre all’aumentare di Tpe il controllore recupera gli errori più velocemente e con legge maggiormente smorzata, anche se la frequenza delle oscillazioni del sistema cresce.
Una traiettoria verosimile è quella diagrammata con colore blu, relativa al valore di Tpe scelto, pari a 0,6 s.
5.2 Manovra di cambio corsia
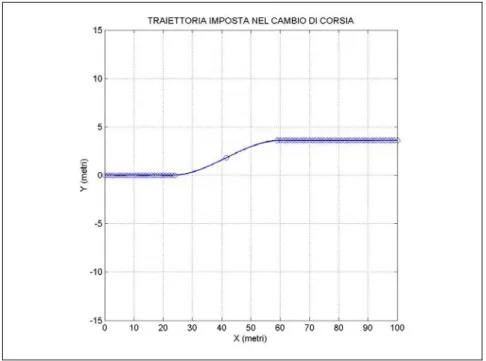
Nel presente paragrafo si simula una manovra di cambio di corsia: il motoveicolo passerà dal percorrere una traiettoria rettilinea al percorrerne un’altra parallela a quella iniziale ma opportunamente traslata. La curvatura della traiettoria varia continuamente durante la manovra, passando da un valore nullo ad uno positivo per poi diventare negativo e infine nuovamente nullo.
5.2.1 Caratteristiche della traiettoria imposta
Come descritto nel paragrafo 4.6, preliminarmente all’esecuzione della simulazione è necessario definire in ambiente Matlab la traiettoria da percorrere e i relativi dati geometrici, che verranno utilizzati dal controllore per determinare ad ogni passo della simulazione l’angolo di rollio desiderato φr e gli errori di posizione e direzione. Questa operazione viene eseguita automaticamente lanciando il relativo file Matlab il cui listato è stato illustrato in dettaglio nel paragrafo 4.6.2; gli unici dati in input che è necessario inserire sono le coordinate cartesiane di un certo numero di punti della traiettoria in base ai quali verrà generata la spline approssimante. In Figura 5.15 è riportata la traiettoria imposta generata in ambiente Matlab: i punti dati in input al file sono cerchiati con colore blu.
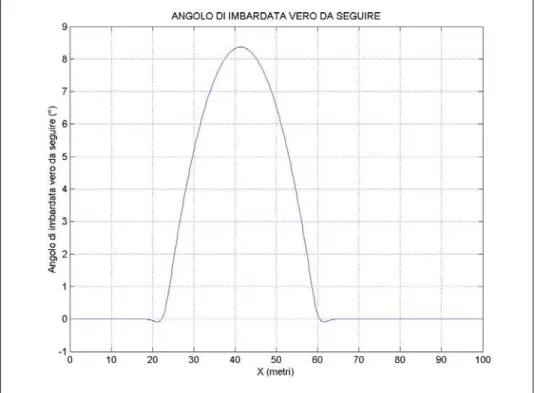
Inoltre Matlab determina l’angolo di imbardata vero da far seguire al veicolo ψv, che servirà al controllore per determinare l’errore di direzione; in Figura 5.16 è riportato il suo andamento in funzione della coordinata x.
Figura 5.16 – Angolo di imbardata vero da seguire ψv in funzione della coordinata x.
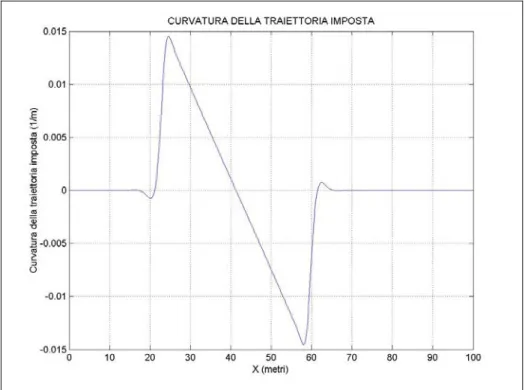
Infine viene valutata la curvatura C della traiettoria, necessaria per la determinazione
dell’angolo di rollio desiderato φr; in Figura 5.17 è riportato il suo andamento in funzione della coordinata x. Sia in Figura 5.16 che in Figura 5.17 si osserva che all’inizio e alla fine
della manovra si hanno dei picchi nei valori dell’angolo di imbardata ψv e nella curvatura da seguire C: questi andamenti sono legati alla tecnica di approssimazione utilizzata per la
generazione della traiettoria e descritta nei paragrafi 4.6.1 e 4.6.2. Nel paragrafo seguente 5.2.2, nel quale sono riportati i risultati delle simulazioni relative a questa manovra, si possono notare gli effetti prodotti da queste anomalie; ad esempio in Figura 5.19 si osserva come l’angolo di rollio raggiunto dal veicolo per effetto di queste piccole oscillazioni sia praticamente ininfluente ai fini dell’esecuzione della manovra.
Figura 5.17 – Curvatura C della traiettoria in funzione della coordinata x.
5.2.2 Risultati delle simulazioni
In Figura 5.18 è illustrata sequenza di fotogrammi della simulazione, realizzata in ambiente post-processor di Adams.
Figura 5.18 – Manovra di cambio corsia.
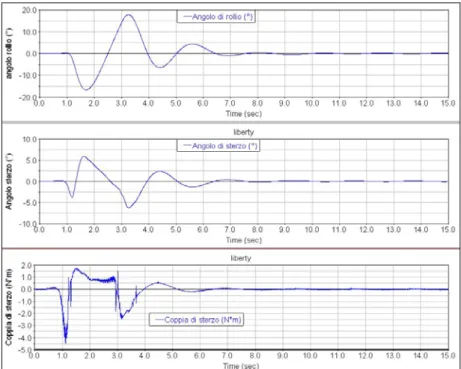
In Figura 5.19 sono invece riportati gli andamenti nel tempo dell’angolo di rollio φ, di quello di sterzo δ, e della coppia di sterzo τ.
Figura 5.19 – Andamenti di φ, δ e τ nel caso di disturbo laterale.
Come si può notare, l’angolo di sterzo ha un picco iniziale di controsterzo necessario a far rollare il veicolo verso l’interno della prima curva da compiere. Successivamente, l’angolo di sterzo segue le variazioni della curvatura del percorso imposto (Figura 5.17): prima cresce fino ad un valore massimo, poi decresce e cambia di segno raggiungendo un valore minimo. A questo punto il veicolo ha compiuto i due cambi di direzione e deve tornare in rettilineo, quindi il modulo dell’angolo di sterzo decresce; alla fine della manovra l’angolo di sterzo ha un picco positivo, necessario a frenare il moto di rollio del veicolo che si deve stabilizzare intorno alla posizione verticale.
In Figura 5.20 sono diagrammati la coordinata y del punto N del veicolo e il suo angolo
di imbardata; si può notare lo spostamento del veicolo verso destra (coordinata y negativa),
necessario a far inclinare il veicolo verso sinistra.
In Figura 5.21 sono invece riportate le forze laterali agenti sui pneumatici; anche qui possiamo notare che inizialmente le forze laterali agiscono verso destra in accordo con la teoria del controsterzo iniziale.
Figura 5.20 – Coordinata y e angolo di imbardata nella manovra di cambio corsia.
In Figura 5.22 sono valutati i carichi verticali agenti sui pneumatici e le escursioni degli ammortizzatori. Si può osservare nelle fasi iniziali dei cambi di direzione il trasferimento di carico verso l’anteriore; notiamo anche una considerevole compressione di entrambe le sospensioni, dovuta al fatto che con il rollio del veicolo, che raggiunge quasi i 20 gradi, la forza centrifuga viene ad avere una rilevante componente nel piano medio del veicolo, e dunque tende a comprimere entrambi gli ammortizzatori, mentre il trasferimento di carico tenderebbe a scaricare il posteriore.
Figura 5.22 – Carichi verticali ed escursioni degli ammortizzatori nella cambio di corsia.
Infine in Figura 5.23 sono diagrammate le derivate temporali degli angoli di imbardata, beccheggio e rollio.
Figura 5.23 – Derivate temporali degli angoli di imbardata, beccheggio e rollio.
5.3 Manovra di curva “ad U”
Nel presente paragrafo si simula una manovra di curva “ad U”: il motoveicolo percorrerà inizialmente una traiettoria rettilinea, si inserirà dunque in un tratto di curva a raggio costante pari a 9,7 metri ed infine uscirà dalla curva per reinserirsi in rettilineo.
5.3.1 Caratteristiche della traiettoria imposta
Anche in questo caso, come visto nella manovra di cambio di corsia, è necessario caratterizzare la traiettoria da percorrere in ambiente Matlab. Questa è riportata in Figura 5.24: i punti assegnati sono cerchiati con colore blu.
Figura 5.24 - Traiettoria imposta nella manovra “ad U”.
Matlab determina poi l’angolo di imbardata vero da far seguire al veicolo ψv, che servirà al controllore per determinare l’errore di direzione; in Figura 5.25 è riportato il suo andamento in funzione dell’ascissa curvilinea s.
Infine viene valutata la curvatura C della traiettoria, necessaria per la determinazione
dell’angolo di rollio desiderato φr; in Figura 5.26 è riportato il suo andamento in funzione dell’ascissa curvilinea s.
Figura 5.26 - Curvatura C della traiettoria in funzione della ascissa curvilinea s.
5.3.1 Risultati della simulazione
In Figura 5.27 è illustrata una sequenza di fotogrammi della simulazione, realizzata in ambiente post-processor di Adams.
In Figura 5.28 sono invece riportati gli andamenti nel tempo dell’angolo di rollio φ, di quello di sterzo δ, e della coppia di sterzo τ.
Figura 5.28 - Andamenti di φ, δ e τ nel caso di manovra “ad U”.
Si noti che la manovra è piuttosto impegnativa: gli angoli di rollio e sterzo raggiungono infatti 36° e 7,5° rispettivamente. Anche in questo caso sono ben visibili i controsterzi all’inizio dell’inserimento e dell’uscita dalla curva. Si può osservare come la legge di rollio sia molto ben smorzata: questo è dovuto all’adozione di coefficienti del controllore variabili linearmente con l’angolo di rollio da seguire φr, come descritto nel paragrafo 4.3. Infatti passando dal tratto rettilineo alla curva si ha un aumento dei coefficienti K2 e K1 dell’equazione del controllore (4.15): l’aumento di K1, che moltiplica la derivata temporale dell’angolo di rollio, rende il moto adeguatamente smorzato; l’aumento di K2, che moltiplica la differenza tra l’angolo di rollio attuale e quello desiderato, vincola maggiormente il veicolo a mantenere l’angolo di rollio imposto φr, rendendolo meno influenzato dai termini legati agli errori sulla traiettoria. A titolo di esempio si riportano in Figura 5.29 gli andamenti dell’angolo di rollio ottenuti per leggi di variazione dei coefficienti del controllore diverse da quella ottimale scelta. In particolare si utilizzano
coefficienti angolari delle rette che definiscono le suddette leggi pari ad 4 3 , 2 1 , 4 1 del valore ottimale. Inoltre si riporta il caso limite di coefficienti costanti durante l’esecuzione della manovra, ovvero con pendenza della retta nulla: in tal caso i coefficienti rimarranno pari a quelli scelti per il caso di rettilineo. Si osserva che al diminuire della pendenza delle rette la legge di rollio diventa sempre meno smorzata, sino ad arrivare all’instabilità nel caso di pendenza nulla, corrispondente a coefficienti costanti.
Figura 5.29 – Angolo di rollio ottenuto con leggi diverse per i coefficienti del controllore.
In Figura 5.30 sono riportate le forze laterali agenti sui pneumatici; sono ben visibili i picchi legati al controsterzo, soprattutto nella forza laterale agente sul pneumatico anteriore.
Figura 5.30 – Forze laterali dei pneumatici nella manovra di curva “ad U”.
In Figura 5.31 sono valutati i carichi verticali agenti sui pneumatici e le escursioni degli ammortizzatori. Anche in questo caso si può osservare nelle fasi iniziali dei cambi di direzione il trasferimento di carico verso l’anteriore; notiamo anche una considerevole compressione di entrambe le sospensioni, dovuta al fatto che con il rollio del veicolo, che raggiunge i 36°, la forza centrifuga viene ad avere una rilevante componente nel piano medio del veicolo, e dunque tende a comprimere entrambi gli ammortizzatori, mentre il trasferimento di carico tende a scaricare il posteriore ed a comprimere l’anteriore.
Infine in Figura 5.32 sono diagrammate le derivate temporali degli angoli di imbardata, beccheggio e rollio.
Figura 5.32 – Derivate temporali degli angoli di imbardata, beccheggio e rollio.
5.4 Manovra di “otto”
Si è infine simulata la manovra di “otto”, considerata la più significativa per esprimere giudizi in termini di maneggevolezza del veicolo. Infatti in vari studi presenti in letteratura è stata riscontrata, nel caso di questa manovra, una buona correlazione tra gli andamenti quantitativi delle grandezze fisiche caratterizzanti la dinamica del sistema e i giudizi dei collaudatori. E’ stato poi possibile effettuare una validazione del modello utilizzato confrontando i dati registrati nelle simulazioni con quelli relativi alle prove sperimentali su pista, forniti da Piaggio & C. S.p.A..
5.4.1 Caratteristiche della traiettoria imposta
Anche in questo caso, la caratterizzazione della traiettoria è stata effettuata in modo automatico in ambiente Matlab partendo da una sequenza di punti dati. Il percorso da seguire è riportato in Figura 5.33: i punti assegnati sono cerchiati con colore blu.
Figura 5.33 – Traiettoria imposta nella manovra di “otto”.
Matlab determina poi l’angolo di imbardata vero da far seguire al veicolo ψv, che servirà al controllore per determinare l’errore di direzione; in Figura 5.34 è riportato il suo andamento in funzione dell’ascissa curvilinea s.
Figura 5.34 – Angolo di imbardata vero da seguire ψv in funzione dell’ascissa curvilinea s. Infine viene valutata la curvatura C della traiettoria, necessaria per la determinazione
dell’angolo di rollio desiderato φr; in Figura 5.35 è riportato il suo andamento in funzione della ascissa curvilinea s.
Figura 5.35 – Curvatura C della traiettoria in funzione della ascissa curvilinea s.
5.4.2 Risultati delle simulazioni
In Figura 5.36 è illustrata sequenza di fotogrammi della simulazione, realizzata in ambiente post-processor di Adams.
In Figura 5.37 si riporta il confronto tra i valori delle grandezze φ, δ e τ registrati nella
simulazione e quelli sperimentali, forniti da Piaggio & C. S.p.A., relativi a due otto compiuti consecutivamente.
Figura 5.37 – Confronto tra φ, δ e τ sperimentali e simulati.
Sostanzialmente si riscontra un buon accordo tra i dati, tenendo presente l’effetto di alcuni fattori che comportano differenze ineliminabili tra la manovra simulata e quella reale: innanzitutto la traiettoria reale è delimitata da birilli e dunque il pilota dovrà tenersi più “largo” di una quantità che è stata valutata in media pari a 70 cm, ma che
indubbiamente varierà sensibilmente durante la manovra. Al contrario nella simulazione la traiettoria viene seguita fedelmente, con errori massimi di circa 30 cm. Un’altra differenza
consiste nel fatto che la velocità del veicolo reale non viene mantenuta perfettamente costante, in quanto il pilota tende a rallentare nell’esecuzione della manovra: questo trova riscontro nel fatto che i segnali sono traslati nel tempo, impiegando il pilota reale circa 17 s
per compiere un intero otto, contro i circa 15 del “pilota virtuale”, che mantiene la velocità praticamente uniforme. Infine va notato che il pilota reale non manterrà il suo busto nel
piano longitudinale del veicolo, mentre quello “virtuale” rimane perfettamente solidale al veicolo, e questo comporta una variazione dell’angolo di rollio da tenere a regime per compiere una determinata curva dato dalla (4.1), e di conseguenza anche una diversità nell’angolo di sterzo.
In Figura 5.38 sono confrontate le velocità di imbardata r e di rollio p simulate e
sperimentali. Anche in questo caso si riscontra un sostanziale accordo quantitativo tra i dati sperimentali e simulati, e le differenze già osservate in precedenza: in particolare nell’andamento della velocità di rollio risulta chiaramente identificabile lo sfasamento nel tempo tra i due segnali, ed il ritardo accumulato dal pilota reale rispetto a quello virtuale al termine del compimento di un otto completo.