PREPARAZIONE DEGLI ESPERIMENTI
5.1 Introduzione
In questo capitolo si fornisce una descrizione generale del motore MPD, dell’impianto a vuoto e del sistema di alimentazione elettrica, per i quali si rimanda aPaola Salvatori [16], Alessio Belli [4], Ugo Cesari [6] per maggiori dettagli, mentre ci si soffermerà con particolare attenzione sulla verifica del campo magnetico applicato, sul sistema di alimentazione gassosa e alla relativa calibrazione.
5.2 Laboratorio IV3 e strumentazione
5.2.1 L’impianto a vuoto IV3Per simulare le condizioni operative in cui un propulsore spaziale dovrà funzionare è necessario far operare il motore in un ambiente a bassa pressione che riproduca almeno parzialmente la condizione di vuoto dello spazio. A tale scopo l’MPD è stato testato all’interno della camera a vuoto IV3 presente al Centrospazio.
La struttura è stata costruita dalla Edwards High Vacuum di Crawley (UK). La camera di prova è costituita da due tronchi cilindrici d’acciaio aventi un diametro interno di 1.25 m posti uno ortogonalmente all’altro, formando una pianta a T e da una camera più piccola aggiunta di recente che completa una pianta a croce. Il gruppo di pompaggio è invece situato al piano inferiore, consta di quattro pompe rotative a masse eccentriche
Edwards HISC 3000 per il basso vuoto (10 mbar) e due booster Edwards
30B5 che consentono di ottenere valori di pressione di 10-4 mbar.
L’accensione delle rotative permette il raggiungimento di 10-1 mbar in pochi minuti, seguita successivamente dall’innesco delle booster che creano in camera una pressione finale di 10-4 mbar.
Una rappresentazione dell’impianto nel suo insieme è riportata nella seguente Figura 5.1.
Figura 5.1 Schema dell’impianto a vuoto IV3
5.2.2 Il motore MPD
Il motore magnetoplasmadinamico utilizzato durante la sperimentazione è a campo magnetico applicato, testato sempre in regime pulsato con impulsi di scarica della durata di 5 ms. Gli elettrodi sono
To the pum p
R ota r y p um p s B o os te r pu m p s
entrambi in rame: l’anodo è una corona circolare sagomata all’estremità per essere parallela alle linee di campo, mentre il catodo centrale è cavo e permette l’iniezione del propellente nella camera di accelerazione. Un solenoide esterno all’anodo fornisce il campo magnetico applicato fino a circa 100 mT sull’asse del motore.
Sono state investigate varie condizioni operative, spingendosi a volte anche oltre i margini di progettazione: la portata di massa è stata variata dai 100 mg/s ai 400 mg/s sempre con argon, mentre il campo elettrico applicato è stato variato da 20 mT a 100 mT.
Il motore è stato interamente progettato e costruito presso Centrospazio, si rimanda a Serena Chiricò [7] per la progettazione.
Nelle seguenti figure si mostra la schematizzazione del motore e dettagli dei vari componenti.
1 2 3 4
5 6 7 8
Figura 5.2 Motore in camera e vista esplosa con particolari
N. Particolare 1 Manicotto 2 Solenoide 3 Boccola 4 Isolante (Macor) 5 Plexiglas 6 Gruppo catodico 7 Isolante (Macor) 8 Anodo
5.2.3 Il sistema di alimentazione elettrica
Caratteristica dei motori MPD è quella di funzionare con valori di corrente dell’ordine dei kA, ed assorbire potenze che superano il MW. Per sopperire a tale fabbisogno viene utilizzato un apposito impianto denominato Pulse Forming Network (PFN), in grado di accumulare energia elettrica da un dispositivo di ricarica e di rilasciarla all’istante desiderato nella forma di un gradino di corrente di ampiezza e durata voluti. Questa rete formatrice di impulsi è costituita da un insieme di condensatori e induttanze che ricreano, tramite la sovrapposizione di più impulsi sinusoidali, il gradino di corrente necessario.
Nella seguente Figura 5.3 è riportato l’impianto di alimentazione elettrica utilizzato. SCR Sonde di tensione Sonda di corrente Ballast PFN Ignitron Unità controllo PFN SCR
Nel caso specifico di questo motore si deve anche aggiungere il sistema di alimentazione del solenoide montato esternamente all’anodo. Per alimentarlo si utilizza una rete di quattro condensatori montati su linee parallele ciascuna di due elementi in serie. La carica avviene collegando ai capi della rete un alimentatore regolato alla tensione cui si vuole portare la batteria di condensatori. Una volta raggiunto il livello di carica voluto, i condensatori vengono fatti scaricare sul solenoide attraverso la chiusura di un interruttore SCR, pilotata dal segnale di trigger proveniente dal sistema di comando per l’accensione del motore.
5.2.4 Il sistema di alimentazione gassosa
La sperimentazione sul motore è stata eseguita durante fasi di funzionamento pulsato quasi-stazionario, sia perché non è possibile erogare in modo continuo le potenze necessarie, sia perché la camera a vuoto non riuscirebbe a mantenere condizioni di vuoto costanti, dovendo smaltire quantitativi di propellente superiori alla sua capacità di pompaggio.
L’impianto di alimentazione gassosa esistente è stato progettato in modo da fornire adeguati impulsi gassosi con portate massime stazionarie superiori al g/s per una durata di 100 ms, condizioni limite che comprendono quelle di funzionamento del motore.
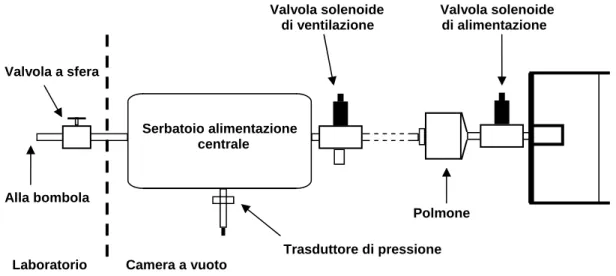
In Figura 5.4 si riporta una rappresentazione schematica dell’impianto di alimentazione gassosa.
Valvola solenoide Valvola solenoide di ventilazione di alimentazione Valvola a sfera Serbatoio alimentazione centrale Alla bombola Polmone Trasduttore di pressione Laboratorio Camera a vuoto
Il gas (argon) è contenuto in una bombola ad alta pressione collegata ad un riduttore di pressione. Per mezzo di una valvola a sfera ad azionamento manuale viene immesso nel condotto in camera a vuoto e attraverso vari passaggi raggiunge il motore. La valvola a sfera viene utilizzata per il controllo dell’immissione del propellente nel serbatoio di alimentazione centrale (acciaio inox, cap. 5 litri). Questo è posizionato all’interno della camera per evitare trafilamenti di aria in quanto le pressioni operative sono generalmente inferiori all’atmosfera per le portate da realizzare in questa campagna sperimentale. Sul serbatoio è montato un trasduttore di pressione e una valvola a solenoide di ventilazione, utilizzata per impostare una ben determinata pressione nel serbatoio. Fissare una certa pressione nel serbatoio significa determinare una precisa portata di propellente al motore. Uscito dal serbatoio di alimentazione il gas arriva in un serbatoio tampone (polmone) più piccolo. Posto subito prima della valvola a solenoide di alimentazione, il polmone ha la funzione di mantenere costante la portata di propellente durante la fase impulsiva di funzionamento del motore. Tutti i condotti di raccordo tra i vari componenti sono tubi in plastica standard per applicazioni pneumatiche di diametro esterno di 6 mm.
Per un quadro riassuntivo dei componenti utilizzati si rimanda in Appendice [A.1].
Nelle seguente Figura 5.5 si mostrano i particolari del serbatoio di alimentazione e del motore con polmone e valvola solenoide.
Valvola solenoide Trasduttore di Polmone di ventilazione pressione
Valvola solenoide di alimentazione
5.3 Procedure di calibrazione
In fase di preparazione degli esperimenti sono state effettuate diverse procedure di calibrazione. Di seguito si descrivono le procedure di calibrazione del sistema di alimentazione gassosa e del campo magnetico applicato, mentre per la calibrazione del trasduttore di spostamento della bilancia di spinta si rimanda aPaola Salvatori [16].
5.3.1 La calibrazione del sistema di alimentazione gassosa
La calibrazione del sistema di alimentazione gassosa è stata effettuata seguendo una procedura già più volte utilizzata presso Centrospazio su motori operanti in regime pulsato. Lo scopo della calibrazione è duplice:
- trovare una correlazione tra pressione nel serbatoio di alimentazione prima della scarica e portata stazionaria realizzata. Infatti impostare una pressione nel serbatoio equivale a definire una precisa portata al motore.
- misurare il ritardo tra il trigger di attivazione della valvola di alimentazione e l’inizio della fase stazionaria di portata.
La calibrazione si compone di due fasi: - calibrazione (statica) dell’iniettore.
Immediatamente a valle della valvola di alimentazione, nel manicotto del motore, è posta una sonda di pressione piezo-resistiva molto veloce. La Figura 5.6 mostra un particolare del montaggio della sonda. Sulla linea, all’esterno della camera a vuoto, viene interposto un misuratore di portata. Fatto il vuoto in camera e verificato che sulla linea non vi sia alcuna perdita, viene aperta la valvola a sfera e la valvola di alimentazione per alcuni secondi, finché non si raggiungono le condizioni stazionarie (i segnali di pressione e portata non variano più nel tempo). A questo punto si registra il segnale della sonda di pressione (in mV) e la corrispondente portata. Questa operazione viene ripetuta per varie condizioni, agendo ogni volta sulla manetta del riduttore di pressione. Alla fine si ottiene una serie di dati portata – segnale sonda che sono interpolabili su una retta.
Le Figure 5.7 e 5.8 mostrano un tipico segnale di tensione del flussimetro e della sonda di pressione rispetto al tempo in fase stazionaria e l’interpolazione fatta tra tutte le prove effettuate.
Figura 5.6 Particolare della sonda di pressione
Figura 5.7 Segnali letti dall’oscilloscopio del flussimetro e della sonda di pressione durante la fase stazionaria di portata
Figura 5.8 Interpolazione tra le prove effettuate
- calibrazione (dinamica) del trasduttore di pressione.
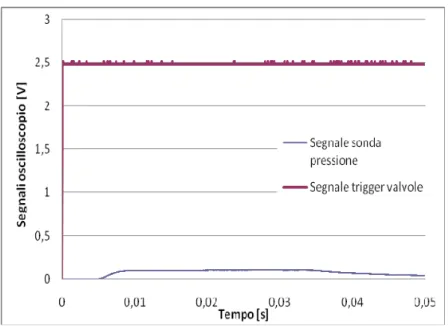
Agendo sulla valvola a sfera si imposta un valore di pressione nel serbatoio di alimentazione, quindi si alimenta la valvola a solenoide di alimentazione in modo pulsato esattamente come durante la fase di scarica. Su un oscilloscopio si registrano il segnale di apertura della valvola solenoide ed il corrispondente valore della sonda di pressione (in mV). In questo modo si riesce anche a misurare il ritardo tra il trigger di apertura delle valvole e il raggiungimento della fase stazionaria della pressione (e quindi della portata).
La Figura 5.9 mostra i segnali della sonda di pressione e del trigger delle valvole, la Figura 5.10 mostra l’andamento temporale del segnale della sonda di pressione, la Figura 5.11 mostra l’interpolazione tra le prove effettuate.
Terminata l’acquisizione dei dati si correlano i valori di portata nella fase stazionaria (ottenuti con la calibrazione statica) con i valori di pressione nel serbatoio (misurati in quella dinamica). Si ottiene così una legge che lega la pressione nel serbatoio di alimentazione alla portata di massa.
Infine il ritardo tra trigger delle valvole e raggiungimento della fase stazionaria di portata (o pressione) noto durante la calibrazione viene impostato sul sistema di comando per l’accensione del motore. In questo caso è stato individuato un ritardo utile per la scarica di 20 msec, quindi
l’ignitron verrà attivato 20 ms dopo il segnale di apertura delle valvole di alimentazione del propellente.
La Figura 5.12 mostra il risultato finale della calibrazione gassosa. Per la strumentazione utilizzata si rimanda all’Appendice [A1].
Figura 5.9 Segnali letti dall’oscilloscopio della sonda di pressione e del trigger delle valvole con pressione nel serbatoio di alimentazione di 755 mBar
Figura 5.10 Andamento temporale del segnale della sonda di pressione
Portata [g/s] Pressione serbatoio [mBar] 0.05 200 0.10 316 0.15 433 0.20 549 0.25 665 0.30 781 0.35 898 0.40 1014 0.45 1130 0.50 1247 0.55 1363 0.60 1479
Figura 5.12 Risultato finale della calibrazione gassosa
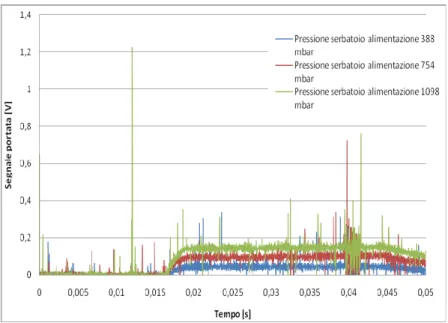
Si può facilmente intuire come il ritardo del massimo valore di portata rispetto al segnale di trigger vari con la pressione del serbatoio di alimentazione. In realtà è stato rilevato sperimentalmente come la variazione di tale ritardo sia molto piccola e trascurabile al variare della pressione impostata, come si può vedere in Figura 5.13.
Figura 5.13 Risultato della correlazione dei dati
5.3.2 Misura del campo magnetico applicato
Il solenoide utilizzato nel motore MPD è stato progettato in un precedente lavoro di tesi (Serena Chiricò [7]) in modo tale da soddisfare tre requisiti fondamentali:
- garantire un campo magnetico massimo applicato sull’asse del motore di 100 mT.
- sulla bocca del catodo il campo deve avere solo componente assiale. - sulla sezione di uscita le linee di campo devono essere parallele alla
superficie interna dall’anodo.
I risultati delle simulazioni effettuate hanno garantito il soddisfacimento dei requisiti, come si può vedere nelle Figure 5.14, 5.15.
Figura 5.14 Andamento del campo magnetico
Figura 5.15 Andamento del campo in corrispondenza dell’anodo
In sede di sperimentazione si è proceduto a misurare il campo magnetico, effettuando una mappatura delle componenti assiale e radiale, verificando anche la simmetria assiale.
Il solenoide è costituito da un supporto di alluminio in cui è realizzato l’alloggiamento per l’avvolgimento di diametro esterno 130 mm e lunghezza assiale di 60 mm. L’avvolgimento è costituito da 7 strati di 42 spire per strato, per un totale di 294 spire. Il filo conduttore è in rame
smaltato, per garantire l’isolamento tra una spira e l’altra e tra il filo e il supporto in cui è avvolto. La Figura 5.16 mostra il solenoide del motore.
Figura 5.16 Il solenoide del motore
Per la misura del campo sono state utilizzate sonde già in dotazione presso Centrospazio, costituite da un circuito integrato lineare ad effetto Hall con uscita differenziale: un segnale aumenta in tensione mentre l’altro diminuisce sotto l’azione di una densità di flusso magnetico. La sonda misura cioè la componente del campo magnetico normale alla superficie del circuito integrato.
Le sonde sono state fissate su delle piccole schede di silicio, montate su un apposito sistema di movimentazione che permette lo spostamento necessario alla mappatura. Il sistema di movimentazione è costituito da un telaio in alluminio sulla cui base è stato assicurato il solenoide con l’asse in posizione verticale. Il telaio è dotato di bracci su cui sono montati i motori passo-passo controllati da un software specifico e le viti che permettono l’accoppiamento vite-madrevite con l’alloggiamento della sonda garantendo lo spostamento assiale e radiale.
Le Figure 5.17, 5.18 mostrano le sonde utilizzate per la misura e il sistema di movimentazione impiegato.
Figura 5.17 Le sonde impiegate per la misure
Figura 5.18 Il sistema di movimentazione utilizzato
L’operazione di mappatura del campo magnetico applicato è stata effettuata portando la sonda nei punti desiderati e alimentando il solenoide
in pulsato con 100 V di tensione regolati sull’alimentatore del solenoide. Contemporaneamente all’acquisizione del segnale della sonda di campo magnetico è stata misurata, mediante una sonda di corrente, la corrente che scorreva nell’avvolgimento.
La mappatura è stata eseguita spostando la sonda lungo rette orientate secondo la direzione assiale spaziate di 10 mm l’una dall’altra e lungo rette orientate secondo la direzione radiale spaziate ancora di 10 mm l’una dall’altra, formando così una griglia all’interno del solenoide.
È stata effettuata anche una calibrazione sulla bocca del catodo, atta a legare i valori di tensione impostati sull’alimentatore del solenoide durante lo sparo con il campo prodotto: i valori misurati sono stati interpolati per avere un andamento della variazione del campo con la tensione impostata sull’SCR.
Sono state poi effettuate misure atte a testare la simmetria assiale del campo e la ripetibilità dello sparo.
Le figure 5.19, 5.20 mostrano il segnale dell’andamento temporale della componente assiale del campo magnetico misurato sulla bocca del catodo con carica dei condensatori a 150 V e il segnale della corrente.
Figura 5.19 Andamento della componente assiale del campo sulla bocca del catodo durante la scarica dei condensatori (il trigger dell’SCR è a 0 ms)
Figura 5.20 Andamento della corrente nel solenoide
Le figure 4.21, 4.22 mostrano il segnale dell’andamento temporale della componente radiale del campo magnetico misurato in prossimità della superficie interna dell’anodo con carica dei condensatori a 100 V e il segnale della corrente.
Figura 5.22 Andamento della corrente nel solenoide
Si può facilmente intuire come il ritardo del massimo valore di campo magnetico rispetto al segnale di trigger vari con la tensione di carica dei condensatori. In realtà è stato rilevato sperimentalmente come la variazione di tale ritardo sia molto piccola e trascurabile al variare della carica dei condensatori, come si può vedere in Figura 5.23. La misura di tale ritardo è stata fondamentale per un corretto settaggio della sequenza di scarica.
Figura 5.23 Ritardi valori massimi del campo
Le figure 5.24, 5.25 mostrano il risultato della mappatura assiale e radiale su un semipiano passante per l’asse del solenoide: le coordinate y=0 mm e r=0 mm corrispondono alla bocca del catodo esattamente sull’asse del solenoide. Per la mappatura radiale ci si è spinti anche al di fuori del solenoide in senso radiale.
Figura 5.24 Componente assiale del campo magnetico con carica SCR di 100 V
L’andamento più discontinuo (rispetto alla componente assiale) della componente radiale del campo è dovuto al minore infittimento dei punti di misura in zone in cui questa componente non è fondamentale per la spinta.
Figura 5.25 Componente radiale del campo magnetico con carica SCR di 100 V
La Figura 5.26 mostra il risultato della calibrazione sulla bocca del catodo: i valori in tabella sono stati utilizzati nel corso della sperimentazione per la carica dei condensatori.
Campo magnetico massimo sull’asse [mT]
Tensione di carica [V] dei condensatori (SCR) Picco massimo di corrente [A] 0 0 0 10 13.2 4.2 20 25.7 8.6 30 38.3 13.0 40 50.9 17.4 50 63.4 21.8 60 76.0 26.3 70 88.6 30.7 80 101.1 35.1 90 113.7 39.5 100 126.3 43.9 110 138.8 48.3 120 151.4 52.7
In Figura 5.27 si mostrano i risultati delle prove di ripetibilità, effettuate sulla bocca del catodo caricando la batteria di condensatori a 100 V. Come si può vedere i risultati sono più che soddisfacenti.
Figura 5.27 Risultati prove di ripetibilità
Per una descrizione dettagliata delle specifiche degli strumenti utilizzati si rimanda all’Appendice [A1].
5.4 La sequenza di scarica
Durante tutti gli esperimenti condotti nel presente lavoro si è utilizzato un ambiente a pressione di circa 10-4 mbar e una durata di scarica di 5 ms.
Per ottenere il funzionamento pulsato quasi-stazionario del motore in questo lasso di tempo sono necessarie alcune operazioni preliminari, da ripetere prima di ogni sparo:
- verifica del livello di vuoto, tramite il controllo dell’indicatore del trasduttore di pressione della camera vuoto, che deve essere nell’intervallo di 10-4 mbar.
- carica della PFN alla tensione desiderata, tramite un apposito pannello di controllo posto nelle vicinanze della camera di prova; il tempo richiesto per l’operazione varia nell’intorno della decina di secondi.
- carica della batteria di condensatori se è richiesta la presenza del campo magnetico esterno. Questa operazione viene eseguita collegando ogni volta la scatola dei condensatori ad un alimentatore a media tensione.
- preparazione degli oscilloscopi in condizione di stand-by per l’acquisizione automatica dei segnali.
Non appena eseguite queste operazioni, si può iniziare l’esperimento e far funzionare il motore. L’innesco avviene tramite la pressione di un
N. sparo Campo magnetico [mT] Corrente [A] 1 78.8 8.2 2 78.7 8.2 3 78.7 8.2 4 78.8 8.2 5 78.8 8.2 6 78.8 8.2 7 78.8 8.2 8 78.7 8.2 9 78.8 8.2 10 78.7 8.2
apposito pulsante di sparo, il quale invia impulsi a gradino di ampiezza +3 V a tutte le apparecchiature collegate (segnale di trigger).
La concatenazione degli eventi alla pressione del pulsante di sparo è la seguente:
- invio del segnale di trigger per apertura delle valvole (segnale di riferimento)
- apertura delle valvole a solenoide poste a monte degli iniettori di propellente
- innesco dell’SCR che chiude il circuito di scarica dei condensatori sul solenoide del motore con un ritardo rispetto al riferimento di 8 ms
- innesco dell’Ignitron e chiusura del circuito della PFN che provoca la scarica tra gli elettrodi con un ritardo di 20 ms rispetto al riferimento
Il ritardo dell’innesco dell’Ignitron è legato al fatto che la portata raggiunge una condizione stazionaria dopo circa 15 ms dopo l’apertura delle valvole, come si può vedere nella Figura 5.10.
Il ritardo dell’innesco dell’SCR è legato alla necessità di sparare in condizioni di massimo campo magnetico applicato, e quindi al ritardo del massimo valore di campo magnetico rispetto al trigger inviato all’SCR.
In figura 5.28 è rappresentato uno schema della sequenza.
Riferimento Campo magnetico Portata tempo 8 ms 12 ms 5 ms SPARO Trigger valvole solenoide
del motore Trigger all’SCR Chiusura dell’Ignitron Apertura dell’Ignitron Figura 5.28 Sequenza di scarica