CAPITOLO 2
MODELLI MATEMATICI PER LE
SOSPENSIONI
2.1 Introduzione
Nel capitolo precedente sono stati illustrati la struttura e il funzionamento di una sospensione; il passo successivo è quello di costruire un modello matematico che possa descriverne il comportamento. In questo capitolo verranno presentati i modelli matematici per le sospensioni con cui verranno sviluppati gli algoritmi di controllo.
2.2 Modello half car DOF2
Il modello che sembra più completo per descrivere il comportamento di uno scooter è l’ half car con due gradi di libertà (DOF2) presentato di seguito:
Figura 2.1 Modello half car DOF2.[6]
Il telaio e il motore sono modellati come corpi rigidi mentre le sospensioni e le ruote sono invece rappresentate da un elemento elestatico e da uno smorzante con caratteristiche non lineari. I parametri che descrivono questo sistema sono: ‐ Mc: massa del telaio (sprung mass). ‐ Jc: momento di inerzia del telaio ‐ mwf e mwr: masse della ruota posteriore e anteriore (unsprung masses). ‐ kwf e kwr: coefficienti di rigidezza del pneumatico anteriore e posteriore. ‐ kf e kr: coefficienti elastici dell’ammortizzatore anteriore e posteriore ‐ βwf e βwr: coefficienti di smorzamento delle ruote anteriore e posteriore ‐ lf e lr: distanza del baricentro del telaio dalle sospensioni. Le variabili che descrivono il modello sono: ‐ zrf e zrr: profilo della strada anteriore e posteriore.
‐ zwf e zwr: posizione verticale della ruota anteriore e posteriore. ‐ zcf e zcf : posizione anteriore e posteriore del telaio.
‐ Zc: posizione verticale del baricentro del telaio.
‐ βf and βr: coefficienti di smorzamento variabili della sospensione anteriore e posteriore.
Questo modello fornisce una descrizione accurata del comportamento delle sospensioni, permettendo di tenere conto dell’accoppiamento tra forze anteriori e quelle posteriori. Tale modello è però molto complesso e, in particolar modo, risulta difficile l’estrazione di tutti i parametri necessari dal veicolo di interesse. Per queste ragioni si è scelto di utilizzare un modello semplificato detto “quarter of car”. La limitazione di questo modello, come suggerito dal nome, è proprio il non poter tenere conto dell’accoppiamento tra ruota anteriore e posteriore. Tale scelta è però giustificata dal fatto che dati sperimentali mostrano che l’influenza di tali accoppiamenti sulle dinamiche della sospensione è contenuta, tipicamente inferiore al 10%. L’utilizzo di tale modello permette, quindi, di mettere a punto strategie di controllo in maniera più semplice ottenendo, allo stesso tempo, risultati molto simili al modello completo “half of car”.
2.3 Modello a un grado di libertà
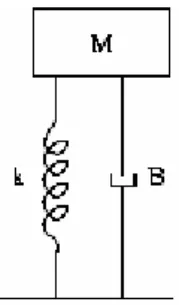
2.3.1 Introduzione al modelloSi presenterà in seguito il modello a un grado di libertà (che non tiene conto dello schiacciamento della ruota), andando a derivare le equazioni che tengono insieme il sistema. Tale modello schematizza la sospensione come segue (Figura 2.2):
Figura 2.2 Modello quarter caar DOF1 per sospensione.
in cui k rappresenta il coefficiente elastico della molla e B rappresenta il coefficiente di smorzamento dell’ammortizzatore. Andremo adesso ad analizzare le possibili regolazioni effettuabili su una sospensione e la loro modellizzazione matematica.
2.3.2 I Coefficienti di frenatura
Regolando i coefficienti di frenatura in compressione e in estensione si varia la velocità con cui la sospensione ritorna alla posizione di equilibrio. In particolare si ha la seguente relazione:
v B Fd =− ⋅
In cui Fd è la forza di smorzamento esercitata dalla sospensione che è proporzionale, tramite un coefficiente (B), alla velocità di compressione o estensione della sospensione stessa. 2.3.3 Il precarico Come già detto nel capitolo 1 ricordiamo che una sospensione non viene mai sollecitata in trazione, ma presenta sempre una leggera compressione iniziale, chiamata precarico. La regolazione del precarico non fa variare la costante di rigidità della molla ma aumenta o diminuisce la forza minima necessaria per far reagire la molla o, più semplicemente, varia la soglia
superata la quale la sospensione comincia a comprimersi. La molla reagisce quindi con una forza pari a: ) ( p m k y y F =− ⋅ Δ −
in cui yΔ rappresenta la variazione della distanza tra gli estremi della sospensione (ossia la variazione della compressione della molla cambiata di segno) rispetto alla condizione a vuoto, y rappresenta il modulo p
dell’accorciamento iniziale dovuto al precarico ed infine k è il coefficiente elastico della molla . Tale regolazione serve a centrare la dinamica dell’ammortizzatore in modo da evitare il più possibile il fondocorsa e il distaccamento della ruota dal suolo.
Considerando che la forza esercitata dalla sospensione, staticamente, eguaglia la forza peso del sistema moto+pilota si ottiene: ) ( y yp k g M⋅ =− ⋅ Δ − e quindi yp k g M y=− ⋅ + Δ
Come si vede la compressione statica yΔ dipende da y : in particolar p modo all’aumentare del precarico la compressione statica diminuisce e quindi aumenta l’altezza da terra. L’aumento della compressione statica implica un allontanamento della dinamica dal suo estremo superiore ma un avvicinamento al fondo corsa inferiore. Con un precarico maggiore sarà quindi più facile avere un distaccamento della ruota dal suolo. E’ importante notare che il precarico non deve essere mai superiore al peso statico delle masse sospese perché se così fosse le sospensioni funzionerebbero solo per sollecitazioni verticali superiori al valore del precarico meno la forza peso delle masse sospese, comportandosi invece come corpi rigidi per sollecitazioni inferiori. In queste condizioni l’energia trasmessa dal fondo stradale verrebbe assorbita quasi interamente dal pneumatico che così rischierebbe di andare in crisi e non funzionare nel modo corretto perché si troverebbe a fare un lavoro aggiuntivo (quello delle sospensioni) per il quale non è stato espressamente progettato [10].
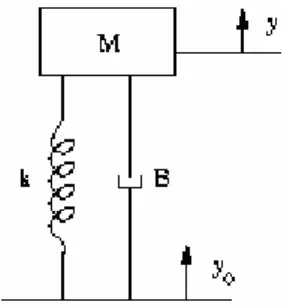
2.3.4 Equazioni per la descrizione del sistema complessivo passivo In relazione alle considerazioni appena esposte è possibile, adesso, andare a ricavare le equazioni complessive che reggono il sistema in Figura 2.3.
Figura 2.3 Modello quarter car DOF1. L’equazione che descrive questo sistema è la seguente: d m F F g y M ⋅(&&+ )= +
in cui y&& rappresenta l’accelerazione della massa sospesa, mentre Fm e F d rappresentano rispettivamente la forza esercitata dalla molla e la forza esercitata dallo smorzatore.
Definiamo, a questo punto, un sistema di riferimento in cui y rappresenta la variazione di altezza della massa sospesa rispetto alla condizione a vuoto mentre y rappresenta la variazione del profilo stradale rispetto alla 0 condizione statica di moto ferma (e quindi strada piatta). In questo modo ricaviamo che le espressioni per le forze diventano: Fm =−k⋅(y−y0 − yp) e Fd =−B⋅(y−y0). E quindi l’equazione complessiva diventa: ) ( ) (y y0 B y y0 k g M y
M ⋅ &&+ ⋅ =− ⋅ − − ⋅ &− &
Tale relazione va modificata come segue per tenere conto del raggiungimento delle condizioni limite del fondocorsa e del distacco della ruota da terra. Definendo y come il modulo dell’accorciamento f dell’ammortizzatore corrispondente al fondocorsa, possiamo scrivere:
M ⋅(y&&+g)=Fm+Fd ⎩ ⎨ ⎧ − ⋅ − = ∞ = ⎩ ⎨ ⎧ − ⋅ − = − ⋅ − = ⎩ ⎨ ⎧ = = ) ( ) ( ) ( 0 0 0 0 0 y y B F F y y B F y y k F F F d m d m d m & & & & se se se f f y y y y y y y y − ≤ − < − < − ≥ − ) ( 0 ) ( 0 ) ( 0 0 0
Spesso si trova un’altra rappresentazione del medesimo sistema in cui la grandezza y rappresenta, questa volta, la variazione della massa sospesa rispetto alla condizione di equilibrio. Con questo nuovo sistema di riferimento l’equazione descrittiva del sistema diventa: d m F F y M⋅ &&= + ⎩ ⎨ ⎧ − ⋅ − = ∞ = ⎩ ⎨ ⎧ − ⋅ − = − ⋅ − = ⎩ ⎨ ⎧ = ⋅ − = ) ( ) ( ) ( 0 0 0 0 y y B F F y y B F y y k F F g M F d m d m d m & & & & se se se p f p p f p y k g M y y y y k g M y y y k g M y y k g M y y − ⋅ + − ≤ − − ⋅ < − < − ⋅ + − − ⋅ ≥ − ) ( ) ( ) ( 0 0 0 Per quanto riguarda la fase di test del controllo si è utilizzato un modello semplificato dall’eliminazione del precarico. Tale condizione non è particolarmente limitativa se si considera che la grandezza yp
k g M⋅ −
sarà mantenuta costante per centrare la dinamica dell’ammortizzatore. Considerazione analoga può essere fatta per quanto riguarda il fondocorsa, la grandezza k g M yf + ⋅ − sarà mantenuta costante (centratura della dinamica dovuta al precarico) e quindi può essere sostituita con y f1 costante. In seguito a tali considerazioni si ottengono le seguenti relazioni: M⋅ &&y =Fm +Fd
⎩ ⎨ ⎧ − ⋅ − = >> − ⋅ = ⎩ ⎨ ⎧ − ⋅ − = − ⋅ − = ⎩ ⎨ ⎧ = ⋅ − = ) ( ), ( ) ( ) ( 0 0 0 0 0 y y B F k R y y R F y y B F y y k F F g M F d m d m d m & & & & se se se 1 0 0 1 0 ) ( ) ( ) ( f f y y y k g M y y y k g M y y − ≤ − ⋅ < − < − ⋅ ≥ − 2.3.5 Modello per le sospensioni semi‐attive DOF1 Il modello a un grado di libertà per le sospensioni semi‐attive è identico a quello passivo se non per il fatto che il coefficiente B è variabile dal sistema di controllo, le equazioni rimangono quindi le medesime.
2.4 Modello DOF2
Un modello più completo di quello appena presentato è quello a due gradi di libertà, che tiene conto del comporatamento elastico della ruota; esso consiste nello schematizzare la sospensione come segue:
Figura 2.5 Modello half car DOF2 per sospensione semi-attiva. Con un procedimento analogo a quello presentato per il modello DOF1 si ottengono le relazioni seguenti: 0 ) ( 2 1 2 1 1⋅y −k ⋅ y − y +F +Fd = m &&
0 ) ( 2 1 2 2 2⋅y +k ⋅ y −y −Fd = m &&
in cui: ⎩ ⎨ ⎧ ⋅ + − ⋅ = g m m y y k F ) ( ) ( 1 2 1 0 1
( ) / ( ) ) ( / ) ( 0 1 1 2 1 0 1 1 2 1 y y k g m m y y k g m m − < ⋅ + − ≥ ⋅ +
) (y2 y1 Cv Fd =− ⋅ & − &
F rappresenta la variazione della forza tra ruota e terreno rispetto alla
condizione di equilibrio; Fd è la forza esercitata dallo smorzatore a coefficiente variabile(MRF damper); m2 è la massa sospesa, m1 la massa non sospesa, k1 il coefficiente di rigidezza della ruota, k2 il coefficiente di
rigidezza della sospensione. Come già detto, tale modello è valido sia per la sospensione passiva con Cv=costante, e per la sospensione semi‐attiva con Cv=variabile.
Nelle figure seguenti si riporta lo schema completo della sospensione sviluppato in ambiente matlab:
Figura 2.6 Schema Matlab della sospensione.
Figura 2.7 Blocco F.
In Figura 2.7 è mostrato il blocco F che rappresenta la variazione della forza tra ruota e terreno, lo switch finale permette di tener conto delle due condizioni: ruota in aderenza e distacco dal suolo. Figura 2.8 Blocco Fd.
Figura 2.9 Blocco per la modifica di K2.
In Figura 2.9 è mostrato il blocco che tiene conto del fondocorsa, quando
(
y2 −y1)
> yf il coefficiente k2 deve essere molto più grosso di quando lamolla è in condizione normale per tener conto della tamponata, per questa ragione viene moltiplicato per 1000, tenendo conto delle caratteristiche delle molle fornite dal costruttore. La caratteristica dell’elemento smorzante nelle sospensioni passive e semi‐attive è riportata nella Figura 2.10.
Figura 2.10 Caratteristica dell’elemento smorzante per una sospensione passiva e una
semi-attiva.
Per i nostri scopi tale caratteristica è stata linearizzata con saturazione. La Figura 2.11 e la Figura 2.12 mostrano la caratteristica linearizzata
dell’ammortizzatore nei casi di sospensione passiva e semi‐attiva rispettivamente.
Figura 2.11 Caratteristica lineare della sospensione passiva.
Figura 2.12 Caratteristica linearizzata della sospensione semi-attiva.
In base ai dati disponibili in letteratura si è scelto di avere una sospensione con le seguenti caratteristiche:
coefficiente di smorzamento variabile tra 200 e 3000 [Ns/m] e forza esercitabile dall’ammortizzatore tra ‐6000 e 6000 [N].
2.5 Modello lineare
2.5.1 Modello lineare della sospensione passiva
Per studiare la problematica del controllo servirà avere un modello lineare su cui studiare il problema. Al fine di ottenere un modello lineare della sospensione, per prima cosa, è necessario ricondursi nella zona di funzionamento in cui le ruote sono attaccate al suolo e non si ha tamponata. Questo significa che per il modello ad un grado di libertà si ottiene la seguente equazione del moto:
Figura 2.13 Modello quarter car DOF1 per sospensione passiva. d m F F y M⋅ &&= + con ⎩ ⎨ ⎧ − ⋅ − = − ⋅ − = ) ( ) ( 0 0 y y B F y y k F d m & &
Figura 2.14 Modello quarter car DOF2 per sospensione passiva.
Per il modello a due gradi di libertà si ottengono invece le seguenti equazioni del moto:
0 ) ( 2 1 2 1 1⋅y −k ⋅ y − y +F +Fd = m &&
0 ) ( 2 1 2 2 2⋅y +k ⋅ y −y −Fd = m &&
in cui: ) ( 1 y1 y0 k F = ⋅ −
) (y2 y1 Cv Fd =− ⋅ & − &
Per la sospensione passiva è quindi possibile ricavare un modello linerare a due gradi di libertà. 2.5.2 Modello lineare della sospensione attiva Consideriamo nuovamente le condizioni di assenza di distacco della ruota da terra e di non raggiungimento della tamponata, questa volta per una sospensione attiva. La sospensione attiva ad un grado di libertà può essere schematizzata come segue:
Figura 2.15 Modello quarter car DOF1 per sospensione attiva.
In cui U è la forza esercitata dall’attuatore attivo. L’equazione del sistema c risulta quindi la seguente:
) ( ) (y y0 u t k y m⋅ &&+ ⋅ − = c
Analogamente per il modello a due gradi di libertà si ottiene:
Figura 2.16 Modello quarter car DOF2 per sospensione attiva. Quindi anche in questo caso F è la forza esercitata dall’attuatore attivo e d le equazioni del moto diventano: 0 ) ( 2 1 2 1 1⋅y −k ⋅ y − y +F −Fd = m &&
0 ) ( 2 1 2 2 2⋅y +k ⋅ y −y +Fd = m &&
) ( 1 y1 y0 k F = ⋅ −
Fd =uc(t)
d F questa volta rappresenta la forza esercitata dall’attuatore attivo. Le grandezze di interesse per ogni sistema risultano le seguenti: 1o ord. 2o ord.
Accelerazione Massa Sospesa: y&& y&&2
Tenuta di strada: k2⋅(y−y0) k1⋅(y1 −y0) Velocità massa sospesa: y& y&2
Velocità relativa sospensione: y& −y&0 y& −2 y&1
Posizione relativa sospensione: (y−y0) y2 −y1
2.5.3 Linearità della sospensione semi‐attiva
La sospensione semi‐attiva è intrinsecamente non lineare, non è infatti possibile scrivere il sistema nella forma: u B x A x&= ⋅ + ⋅
in cui x è il vettore delle variabili di stato, mentre u è il vettore degli ingressi. Nel caso di sospensione semi attiva, infatti, gli ingressi sono la strada e il coefficiente di smorzamento, quest’ultimo però compare anche nella matrice A, il sistema risulta non lineare. E’ importante notare che la sospensione semi‐attiva e attiva sono uguali almeno quando la sospensione attiva si limita a dissipare energia:
c
u y y
Cv⋅(&2 − &1)= e k⋅
(
y&−y&0)
=uc se uc⋅(
y&2 −y&1)
≤00 =
Cv
e k =0
se
uc⋅
(
y&2 −y&1)
>0La sospensione semi‐attiva si comporta come una sospensione attiva e quindi lineare, almeno per un certo periodo di funzionamento: come si vedrà nel capitolo successivo questo sarà molto importante per lo sviluppo di alcuni tipi di controllori.
2.6 Confronto tra modello lineare DOF1 e DOF2
Per i fini di questo lavoro si è scelto di utilizzare il modello a due gradi di libertà rispetto a quello a un solo grado di libertà poiché più completo. Nonostante questo modello sia utilizzato massicciamente in letteratura, si trovano anche diversi riferimenti a quello a un grado di libertà: per questa ragione si è scelto di confrontarli per capire quali siano le differenze tra idue. Poiché i controllori verranno studiati sui sistemi lineari (attivi) per poi portarli sui non lineari si è deciso di confrontare i due sistemi lineari DOF1 e DOF2 per vedere come si comportano. I due sistemi possono essere scritti come segue: u B x A x& = ⋅ + ⋅
(1)
u D x C y= ⋅ + ⋅(2)
in cui si scelgono come uscite tutte le variabili che vogliamo confrontare e quindi calcolarne la funzione di trasferimento; per il sistema ad un grado di libertà si ha: 0 0 0 1 0 0 1 0 1 0 U y m y y y m k y y y & & & & && ⋅ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + ⋅ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⋅ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −(1)
0 0 0 0 0 1 0 0 0 0 0 0 0 1 ) ( 0 1 1 0 0 1 0 0 ) ( ) ( ) ( y U m y y y km k y y y y y y y k y & & & & & && ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − ⋅(2)
Mentre per quello DOF2 si ha: o y U m m y y y y y y m k m k m k y y y y y y & & & && & & && & & ⋅ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − 0 1 0 0 1 0 1 0 0 0 1 0 0 0 0 0 0 1 0 1 0 1 2 1 0 1 2 1 2 1 1 1 2 2 2 1 0 1 2 1 2(1)
0 2 1 0 1 2 1 2 1 2 2 1 2 1 2 2 0 1 2 0 0 0 0 0 0 0 0 0 1 1 0 1 0 0 0 0 1 0 0 1 0 0 0 0 0 0 0 y U m y y y y y y k m k y y y y y y y y & & & & & & && ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − −(2)
Le figure successive rappresentano le funzioni di trasferimento dei due sistemi per le diverse grandezze di interesse in funzione dei due ingressi possibili: la strada e la forza dell’attuatore.
Figura 2.17 Funzione trasferimento:accelerazione massa sospesa-forza attuatore.
Figura 2.18 Funzione di trasferimento: tenuta di strada-forza attuatore.
Figura 2.19 Funzione di trasfrimento: velocità massa sospesa-forza attuatore.
Figura 2.20 Funzione di trasferimento: compressione sospensione-forza attuatore.
Figura 2.21 Funzione di trasferimento: velocità sospensione-forza attuatore.
Figura 2.22 Funzione di trasferimento: accelerazione massa sospesa-strada.
Figura 2.23: funzione di trasferimento: Tenuta di strada-strada.
Figura 2.24 Funzione di trasferimento: velocità massa sospesa-strada.
Figura 2.25 Funzione di trasferimento: compressione sospensione-strada.
Figura 2.26 Funzione di trasferimento: velocità relativa sospensione-strada.
Come si vede dalle figure, il sistema DOF1 è una buona approssimazione di quello DOF2, per la maggior parte delle grandezze, fino a una frequenza non troppo elevata. Considerando che, in base a dati sperimentali, generalmente il contenuto spettrale della strada non supera i 100 Hz, si capisce come utilizzare il sistema a un grado di libertà per progettare un controllore possa condurre ugualmente a un risultato accettabile. Tuttavia, per quanto riguarda gli obbiettivi di questo lavoro, si è preferito utilizzare il sistema a due gradi di libertà in quanto più preciso e allo stesso tempo non troppo complesso dal punto di vista computazionale.